2020年考研清华大学机械制图习题答案
- 格式:pdf
- 大小:3.16 MB
- 文档页数:36
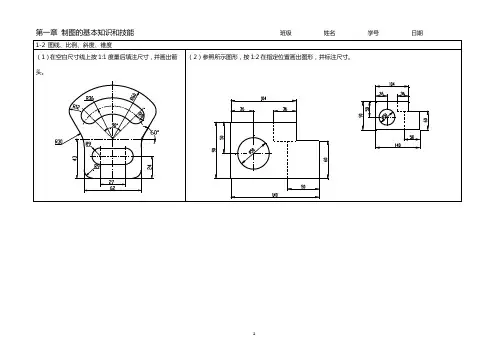
机械制图习题集答案第3页图线、比例、制图工具的用法、尺寸注法、斜度和锥度●要掌握和理解比例、斜度、锥度的定义;各种图线的画法要规范。
第4页椭圆画法、曲线板用法、平面图形的尺寸注法、圆弧连接1、已知正六边形和正五边形的外接圆,试用几何作图方法作出正六边形,用试分法作出正五边形,它们的底边都是水平线。
●注意多边形的底边都是水平线;要规范画对称轴线。
●正五边形的画法:①求作水平半径ON的中点M;②以M为圆心,MA为半径作弧,交水平中心线于H。
③AH为五边形的边长,等分圆周得顶点B、C、D、E④连接五个顶点即为所求正五边形。
2、用四心圆法画椭圆(已知椭圆长、短轴分别为70mm、45mm)。
●参教P23四心圆法画椭圆的方法做题。
注意椭圆的对称轴线要规范画。
3~4、在平面图形上按1:1度量后,标注尺寸(取整数)。
5、参照左下方所示图形的尺寸,按1:1在指定位置处画全图形。
第6页点的投影1、按立体图作诸点的两面投影。
●根据点的两面投影的投影规律做题。
2、已知点A在V面之前36,点B在H面之上,点D在H面上,点E在投影轴上,补全诸的两面投影。
●根据点的两面投影的投影规律、空间点的直角坐标与其三个投影的关系及两点的相对位置做题。
3、按立体图作诸点的两面投影。
●根据点的三面投影的投影规律做题。
4、作出诸点的三面投影:点A(25,15,20);点B距离投影面W、V、H分别为20、10、15;点C在A之左,A之前15,A之上12;点D在A之下8,与投影面V、H等距离,与投影面W的距离是与H面距离的3.5倍。
●根据点的投影规律、空间点的直角坐标与其三个投影的关系及两点的相对位置做题。
各点坐标为:A(25,15,20)B(20,10,15)C(35,30,32)D(42,12,12)5、按照立体图作诸点的三面投影,并表明可见性。
●根据点的三面投影的投影规律做题,利用坐标差进行可见性的判断。
(由不为0的坐标差决定,坐标值大者为可见;小者为不可见。
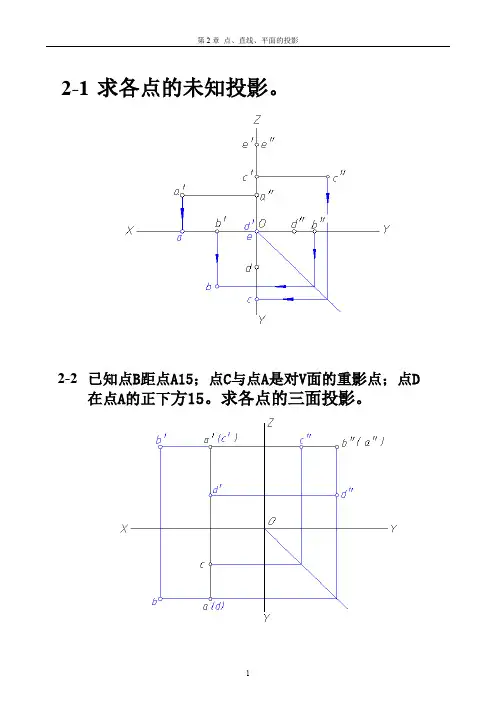
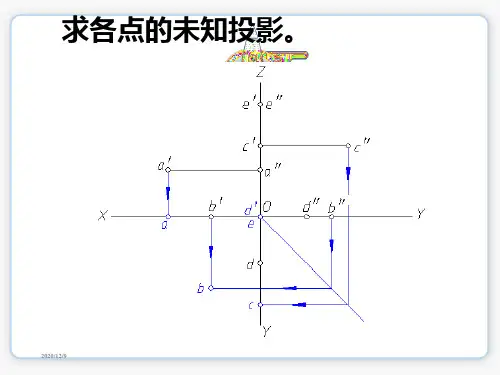
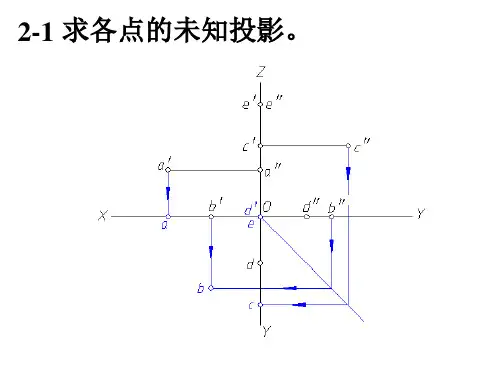
2-1求各点的未知投影。
2-2已知点B距点A15;点C与点A是对V面的重影点;点D 在点A的正下方15。
求各点的三面投影。
2-3已知点A(25,15,20);点B 距W 、V 、H 面分别为20、10、15;点C 在点A 之左10、之前15、之上12;点D 在点A 之上5、与H 、V 面等距、距W 面12。
求作各点的三面投影并填写下表。
2-4已知直线AB 的实长为15,求作其三面投影。
⑴AB ∥W 面,β=30°;点B 在点A之下、之前。
⑵AB ∥V 面,γ=60°;点B 在点A 之下、之右。
⑶AB ⊥H 面,点B 在点A 之下。
2-5求直线AB上点K的正面投影。
2-6在直线AB上取一点C,使其到H及V面的距离相等。
2-7标出交叉二直线上的重影点并判别可见性。
2-8判断两直线的相对位置(平行、相交、交叉、垂直相交、垂直交叉)并将答案填写在下面的括号内。
2-9由点A作直线AB与直线CD相交并使交点距H 面12。
2-10求直线AB、CD的交点K。
2-11过点C作直线CD与已知直线AB平行。
2-12作与已知直线AB、CD平行且相距为15的直线MN,并使MN的实长为20,点M距W面30,点N在点M之右(任求一解)。
2-13过点C作直线CD与直线AB垂直相交。
2-14过点C作直线CD与直线AB垂直相交。
2-15作正平线EF距V面15,并与直线AB、CD相交(点E、F分别在直线AB、CD上)。
2-16作直线EF平行于OX轴,并与直线AB、CD相交(点E、F分别在直线AB、CD上)。
2-17过点C作一直线与直线AB和OX轴都相交。
2-18作一直线MN,使其与已知直线CD、EF相交,同时与已知直线AB平行(点M、N分别在直线CD、EF上)。
*2-19作正平线MN与直线AB、CD、EF都相交。
*2-20作直线MN与已知直线AB、CD、EF均相交,其中与直线AB的交点距H面15。
*2-21作任一直线MN分别与已知直线AB、CD、EF 相交于M、K、N点,且使MK=KN。
《机械制造工艺学》习题参考答案常同立、杨家武、佟志忠编著清华大学出版社第一章机械制造工艺预备1-1参考答案要点:现代机械产品的开发与改进是极其复杂的持续的动态过程,大致可以用图1.1描述。
机械产品开发与改进系统可以描述为一个负反馈系统,它描述了机械产品依据用户需求反馈信息,不断改进和不断发展的动态过程。
机械产品开发与改进系统中包含产品决策、产品设计、工艺编制、产品制造、市场检验等环节。
上述环节之中任何一个环节的断裂,都会导致系统的崩溃。
因此上述环节都具有与系统同等的重要性,每个组成环节都具有无可替代的重要性。
因此学习机械制造工艺学很重要,很有意义。
图1.1 机械产品开发与改进系统1-2参考答案要点:按照专业教学指导委员会制定大纲,机械制造工艺学研究内容主要包含两个部分,即机械加工工艺学和机器装配工艺学。
它们分别以机械加工工艺过程和机器的装配工艺过程为研究对象。
其中机械加工工艺过程指冷加工工艺过程。
机械制造的工艺过程特指零件的机械加工工艺过程和机器的装配工艺过程。
此外,机械制造工艺学还包括非常规加工方法概述,随着技术发展进步,非常规制造方法越来越多在工程实际中获得应有,并取得效果。
1-3参考答案要点:生产过程是指机械产品从原材料开始到成品之间各相互关联的劳动过程的总和。
工艺过程是指在生产过程中,通过改变生产对象的形状、相互位置和性质等,使其成为成品或半成品的过程。
工艺规程参看第二章机械制造工艺规程。
工艺规程在生产中的作用参看第二章机械制造工艺规程作用。
1-4参考答案要点:人们按照产品的生产纲领、投入生产的批量,可将生产分为:单件生产、批量生产和大量生产三种类型。
各种生产类型的工艺特征如下表:工艺特点单件或小批量生产中批量生产大批或大量生产毛坯的制造方法铸件用木模手工造型;锻件用自由锻部分铸件用金属模造型;部分锻件用模锻铸件广泛用金属模机器造型,锻件广泛用模锻《机械制造工艺学》习题参考答案常同立、杨家武、佟志忠编著清华大学出版社第二章机械加工工艺规程制定2-1参考答案要点:机械工艺规程在指导生产上发挥重要作用,主要体现在如下几个方面:1)工艺规程是指导生产的主要技术文件;2)工艺规程是生产组织和管理工作的基本依据;3)工艺规程是新、扩建工厂或车间的基本资料。
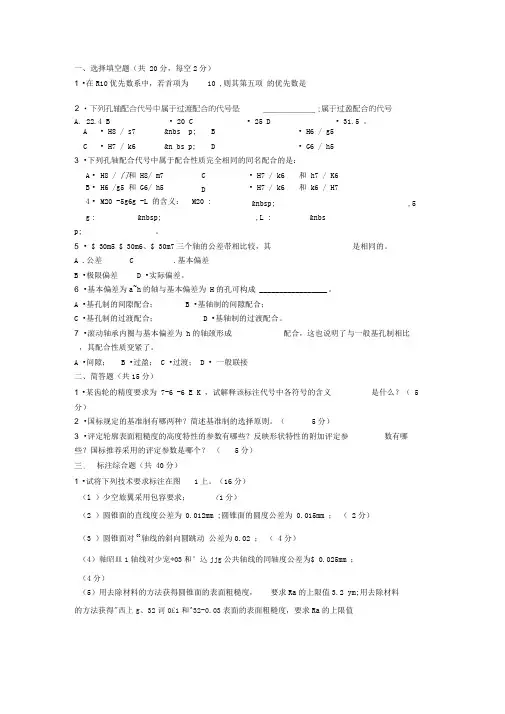
一、选择填空题(共 20分,每空2分)1 •在R10优先数系中,若首项为10 ,则其第五项的优先数是2 •下列孔轴配合代号中属于过渡配合的代号是_____________ ;属于过盈配合的代号A. 22.4 B • 20 C • 25 D • 31.5 。
A • H8 / s7 &nbs p;B • H6 / g5C • H7 / k6 &n bs p;D • G6 / h53 •下列孔轴配合代号中属于配合性质完全相同的同名配合的是:A • H8 / 门和 H8/ m7 C • H7 / k6 和 h7 / K6B • H6 /g5 和 G6/ h5 D • H7 / k6 和 k6 / H74 • M20 -5g6g -L 的含义:M20 : ,5g : ,L : 。
5 • $ 30m5 $ 30m6、$ 30m7三个轴的公差带相比较,其是相同的。
A .公差 C .基本偏差B •极限偏差 D •实际偏差。
6 •基本偏差为a~h的轴与基本偏差为 H的孔可构成 _________________ 。
A •基孔制的间隙配合;B •基轴制的间隙配合;C •基孔制的过渡配合;D •基轴制的过渡配合。
7 •滚动轴承内圈与基本偏差为 h的轴颈形成配合,这也说明了与一般基孔制相比,其配合性质变紧了。
A •间隙;B •过盈;C •过渡;D • 一般联接二、简答题(共15分)1 •某齿轮的精度要求为 7-6 -6 E K ,试解释该标注代号中各符号的含义是什么?( 5 分)2 •国标规定的基准制有哪两种?简述基准制的选择原则。
(5分)3 •评定轮廓表面粗糙度的高度特性的参数有哪些?反映形状特性的附加评定参数有哪些?国标推荐采用的评定参数是哪个?(5分)三.标注综合题(共 40分)1 •试将下列技术要求标注在图1上。
(16分)(l )少空旅翼采用包容要求;(1分)(2 )圆锥面的直线度公差为 0.012mm ;圆锥面的圆度公差为 0.015mm ;( 2分)(3 )圆锥面对03轴线的斜向圆跳动公差为0.02 ;( 4分)(4)軸昭皿1轴线对少宠*03和°込jjg公共轴线的同轴度公差为$ 0.025mm ;(4分)(5)用去除材料的方法获得圆锥面的表面粗糙度,要求Ra的上限值3.2 ym;用去除材料的方法获得"西上g、32诃0£1和^32-0.03表面的表面粗糙度,要求Ra的上限值A .间隙;B .过盈;C .过渡;D 般联接分别为0.8、0.4 ^m 和0.8 ym ,其余表面的表面粗糙度要求 Ra 的上限值均为12.5卩m ;( 5 分)图一2.改正图 2 中各项形位公差标注上的错误(不得改变形位公差项目)并直接标注 在图 3上。
机械制图习题集答案第3页图线、比例、制图工具的用法、尺寸注法、斜度和锥度●要掌握和理解比例、斜度、锥度的定义;各种图线的画法要规范。
第4页椭圆画法、曲线板用法、平面图形的尺寸注法、圆弧连接1、已知正六边形和正五边形的外接圆,试用几何作图方法作出正六边形,用试分法作出正五边形,它们的底边都是水平线。
●注意多边形的底边都是水平线;要规范画对称轴线。
●正五边形的画法:①求作水平半径ON的中点M;②以M为圆心,MA为半径作弧,交水平中心线于H。
③AH为五边形的边长,等分圆周得顶点B、C、D、E④连接五个顶点即为所求正五边形。
2、用四心圆法画椭圆(已知椭圆长、短轴分别为70mm、45mm)。
●参教P23四心圆法画椭圆的方法做题。
注意椭圆的对称轴线要规范画。
3~4、在平面图形上按1:1度量后,标注尺寸(取整数)。
5、参照左下方所示图形的尺寸,按1:1在指定位置处画全图形。
第6页点的投影1、按立体图作诸点的两面投影。
●根据点的两面投影的投影规律做题。
2、已知点A在V面之前36,点B在H面之上,点D在H面上,点E在投影轴上,补全诸的两面投影。
●根据点的两面投影的投影规律、空间点的直角坐标与其三个投影的关系及两点的相对位置做题。
3、按立体图作诸点的两面投影。
●根据点的三面投影的投影规律做题。
4、作出诸点的三面投影:点A(25,15,20);点B距离投影面W、V、H分别为20、10、15;点C在A之左,A之前15,A之上12;点D在A之下8,与投影面V、H等距离,与投影面W的距离是与H面距离的3.5倍。
●根据点的投影规律、空间点的直角坐标与其三个投影的关系及两点的相对位置做题。
各点坐标为:A(25,15,20)B(20,10,15)C(35,30,32)D(42,12,12)5、按照立体图作诸点的三面投影,并表明可见性。
●根据点的三面投影的投影规律做题,利用坐标差进行可见性的判断。
(由不为0的坐标差决定,坐标值大者为可见;小者为不可见。
第一章制图的基本知识和技能班级姓名学号日期
第一章制图的基本知识和技能班级姓名学号日期
第一章制图的基本知识和技能班级姓名学号日期
第三章正投影法的基本原理班级姓名学号日期
第三章正投影法的基本原理
第三章正投影法的基本原理班级姓名学号日期
第三章正投影法的基本原理班级姓名学号日期
第三章 正投影法的基本原理 班级 姓名
学号 日期
第三章正投影法的基本原理班级姓名学号日期
第三章正投影法的基本原理班级姓名学号日期
第三章正投影法的基本原理班级姓名学号日期
第三章正投影法的基本原理班级姓名学号日期
第三章正投影法的基本原理班级姓名学号日期
第四章变换投影面法班级姓名学号日期
第四章变换投影面法班级姓名学号日期
第四章变换投影面法班级姓名学号日期
第五章基本体的三视图班级姓名学号日期
第五章基本体的三视图班级姓名学号日期
第五章基本体的三视图班级姓名学号日期
第五章基本体的三视图班级姓名学号日期
第五章基本体的三视图班级姓名学号日期
第五章基本体的三视图班级姓名学号日期
第五章基本体的三视图班级姓名学号日期。