船用雷达的操作和使用
- 格式:docx
- 大小:37.25 KB
- 文档页数:3
船用雷达0引言雷达概念形成于20世纪初。
雷达是英文radar的音译,为Radio Detection And Ranging的缩写,意为无线电检测和测距的电子设备。
它是利用电磁波探测目标的电子设备。
雷达的基本任务是探测感兴趣的目标,测定有关目标的距离、方向、速度等状态参数。
雷达主要由天线、发射机、接收机(包括信号处理机)和显示器等部分组成。
船上装备雷达始自第二次世界大战期间,战后逐渐扩大到民用商船。
1雷达的基本工作原理雷达发射机产生足够的电磁能量,经过收发转换开关传给天线。
天线将这些电磁能量辐射至大气中,集中在某一个很窄的方向上形成波束,向前传播。
电磁波遇到波束内的目标后,将沿着各个方向产生反射,其中的一部分电磁能量反射回雷达的方向,被雷达天线获取。
天线获取的能量经过收发转换开关送到接收机,形成雷达的回波信号。
由于在传播过程中电磁波会随着传播距离而衰减,雷达回波信号非常微弱,几乎被噪声所淹没。
接收机放大微弱的回波信号,经过信号处理机处理,提取出包含在回波中的信息,送到显示器,显示出目标的距离、方向、速度等。
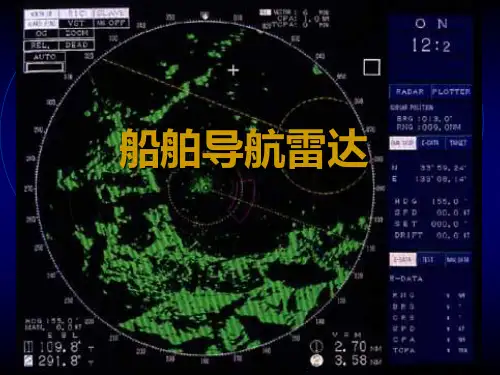
2船用导航雷达2.1 船用导航雷达简介船用导航雷达(marine radar )是保障船舶航行,探测周围目标位置,以实施航行避让、自身定位等用的雷达,也称航海雷达。
它特别适用于黑夜、雾天引导船只出入海湾、通过窄水道和沿海航行,主要起航行防撞作用。
2.2 船用雷达与普通雷达的区别一般雷达把自身作为不动点表示在平面位置显示器的中心。
但在航海中,船舶自身在运动,总是与固定目标或运动目标作相对运动。
适应航海环境的雷达,应是真正运动的雷达,须能自动输入船舶自身的航速和航向,数据必须相当准确。
2.3船用导航雷达的最小作用距离—盲区导航雷达是用来探测水上目标的方位和距离,它不受气候影响,可以全天候引导船舶进出港口、码头和海上安全航行。
导航雷达最大作用距离主要取决于雷达脉冲的传播天线,如雷达天线高度、目标大小、形状及反射天线等。
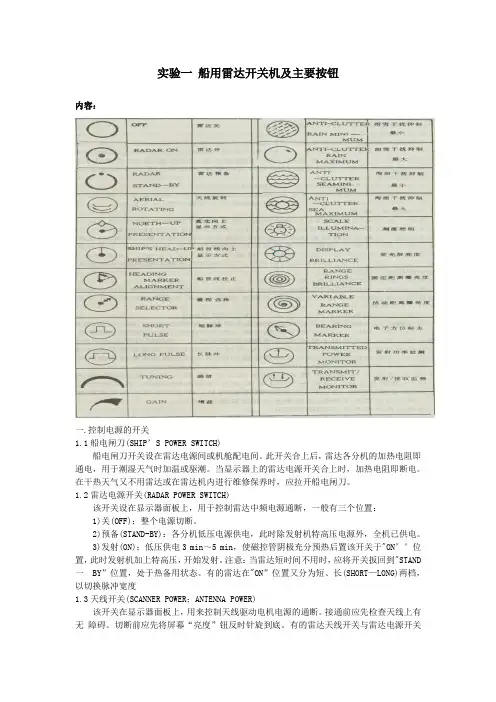
实验一船用雷达开关机及主要按钮内容:一.控制电源的开关1.1船电闸刀(SHIP’S POWER SWITCH)船电闸刀开关设在雷达电源间或机舱配电间。
此开关合上后,雷达各分机的加热电阻即通电,用于潮湿天气时加温或驱潮。
当显示器上的雷达电源开关合上时,加热电阻即断电。
在干热天气又不用雷达或在雷达机内进行维修保养时,应拉开船电闸刀。
1.2雷达电源开关(RADAR POWER SWITCH)该开关设在显示器面板上,用于控制雷达中频电源通断,一般有三个位置:1)关(OFF):整个电源切断。
2)预备(STAND-BY):各分机低压电源供电,此时除发射机特高压电源外,全机已供电。
3)发射(ON):低压供电3 min~5 min,使磁控管阴极充分预热后置该开关于"ON’’位置,此时发射机加上特高压,开始发射。
注意:当雷达短时间不用时,应将开关扳回到"STAND 一BY”位置,处于热备用状态。
有的雷达在"ON”位置又分为短、长(SHORT—LONG)两档,以切换脉冲宽度1.3天线开关(SCANNER POWER;ANTENNA POWER)该开关在显示器面板上,用来控制天线驱动电机电源的通断。
接通前应先检查天线上有无障碍。
切断前应先将屏幕“亮度”钮反时针旋到底。
有的雷达天线开关与雷达电源开关同轴安装。
有的雷达在“预备”位置时天线即旋转。
有的雷达则在“发射”位置时天线才旋转,显示器才能调出扫描线。
天线驱动电机的电源常用船电而非中频电,在安装或维修时应予注意。
二、调节图像质量的控钮1.亮度(BRILIAANCE;INTENSITY)该控钮用来调整扫描线的亮度。
开关机前或转换量程前,应先关至最小,开机后应调到扫描线刚见未见。
2.聚焦(FOCUS)该控钮用来调整屏上光点的粗细。
应调到固定距标圈最细、图像清晰为止。
3.增益(GAIN)该控钮用来调整接收机中放放大量,以控制回波和杂波的强弱。
应调到屏上杂波斑点刚见未见,但在观测远距离弱回波时可适当增大。
船用雷达的操作方法
船用雷达的操作方法主要包括以下步骤:
1. 打开雷达电源:首先将船用雷达的电源开关打开,确保雷达设备能够正常供电。
2. 调整雷达参数:设置雷达的工作参数,例如雷达的功率、增益、频率等。
根据实际需求,调整雷达的参数以实现最佳的工作效果。
3. 打开雷达显示器:将船用雷达的显示器打开,以便观察雷达回波图像。
根据雷达设备的类型和型号,雷达显示器可能是一个独立的设备,也可能是与雷达设备集成在一起的。
4. 设置雷达扫描模式:根据实际需要,选择适当的雷达扫描模式,例如水平扫描、垂直扫描、容许扇形扫描等。
不同的雷达扫描模式适用于不同的任务和环境。
5. 观察雷达回波:通过雷达显示器观察雷达的回波图像。
回波图像通常显示船周围的物体和障碍物的位置、距离和大小等信息。
6. 根据雷达回波进行导航:根据雷达回波图像,结合其他导航设备(例如电子地图、GPS等),进行航行导航。
根据雷达回波的位置和特征,及时调整船只航向,避免与障碍物碰撞。
7. 维护和保养雷达设备:定期进行雷达设备的维护和保养,包括清洁雷达天线、检查设备连接和电源等,以保证雷达设备的长期稳定运行。
需要注意的是,船用雷达的操作方法可能会根据具体的雷达设备型号和制造商而有所不同。
因此,在使用船用雷达之前,建议阅读并熟悉相关的操作手册和使用说明。
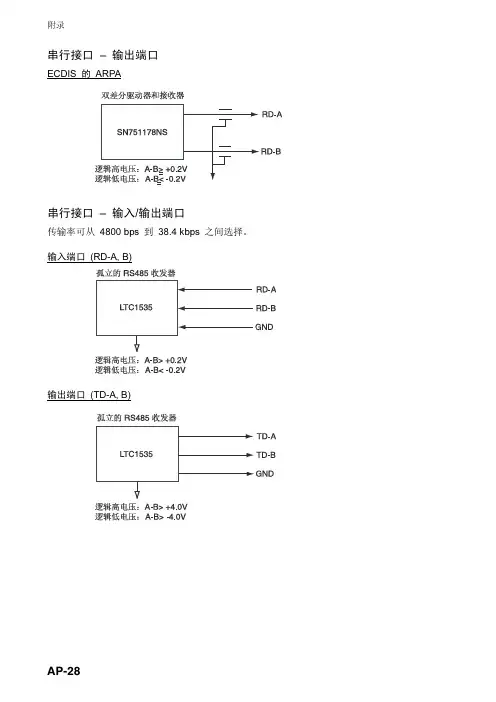
附录串行接口 – 输出端口ECDIS 的 ARPA串行接口 – 输入/输出端口传输率可从 4800 bps 到 38.4 kbps 之间选择。
输入端口 (RD-A, B)输出端口 (TD-A, B)附录3. 部件列表和部件位置部件列表处理器单元 RPU-014、控制单元 RCU-104/105、显示单元 MU-201CR/ MU-231CRFURUNOModelFR-21x7/28x7 Series (incl. BB series)UnitELECTRICAL PARTS LISTSYMBOLPRINTED CIRCUIT BOARD/REMARKSASSY. TYPEPROCESSOR UNIT RPU-013PTU Board 03P9339 AC spec.03P9338 DC spec.SPU Board 03P9337HV BoardHV9017Terminal Board 03P9342NET Board03P9332CONTROL UNIT RCU-014PNL Board 03P9343BUZ Board 03P9362Trackball Assy.TA4726NCONTROL UNIT RCU-015PNL Board 03P9344Trackball Assy.TA4726NDISPLAY UNIT MU-201CRPWR Pack RKW-12-13RE AC spec.DC-DC Board 03P9359DC spec.Noise FilterCF-205AAC spec.MXB-1206-33DC spec.DVI I/F Board SCBFRNB-A INVERTER Board 201PW021-C LCD Board 201PW023-H LCD Unit 210NL128102AC31-02DISPLAY UNIT MU-231CRPCBBSM-501APWR Pack RKW-12-13RE AC spec.DC-DC Board 03P9359DC spec.Noise FilterCF-205AAC spec.MXB-1206-33DC spec.FIL Board 03P9360INVERTER Board NA19002-4241LCD Board NA21808LCD Unit FLC59UXC8V-04DVI I/F Board BSM-501AProcessor Unit RPU-013 Control Unit RCU-014Control Unit RCU-015Display Unit MU-201CR Display Unit MU-231CR2003/10附录天线单元 RSB-096/097(用于 FAR-2117(-BB)/2127(-BB)/2817/2827)FURUNO Model FAR-2117(BB)/2127(BB)/2817(BB)/2827(BB)Unit Antenna Unit RSB-096/097ELECTRICAL PARTS LIST2003/10SYMBOL NAME REMARKSPRINTED CIRCUIT BOARDRF03P9349BP03P9347MD03P9244-A FAR-2117/2817 03P9244-B FAR-2127/2827SCANNER CHASSISRSB-09624 rpmRSB-09742 rpmRF MODULERTR-078FAR-2117/2817RTR-079FAR-2127/2827MIC ASSEMBLYRU-9601FAR-2117/2817RU-9603FAR-2127/2827MOTORD8G-51624 rpm, w/capacitorD8G-57142 rpm, w/capacitorDIODE LIMITERRU-9099FAR-2117/2127/2817/2827CIRCULATORRC-3686FAR-2117/2127/2817/2827PULSE TRANSFORMERRT-9023FAR-2117/2817RT-9025FAR-2127/2827MAGNETRONMG4010 or MAF1425B FAR-2117/2817MG5436FAR-2127/2827附录天线单元 RSB-103/104/105 (FAR-2827W)FURUNOModelFAR-2827WUnitAntenna Unit RSB-104/105ELECTRICAL PARTS LISTSYMBOL NAMEREMARKSPRINTED CIRCUIT BOARD TB03P9349BP GEN03P9347MOTOR D8G-5162003/10收发器单元 RTR-081 (FAR-2827W)FURUNOModelFAR-2827WUnitTransceiver Unit RTR-081ELECTRICAL PARTS LISTSYMBOL NAMEREMARKSPRINTED CIRCUIT BOARDTB 03P9349IF AMP 03P9335PWR 03P9348MD 03P9244RFC 03P9346MIC ASSEMBLYRU-9603MOTOR24 rpmTR LIMITER RU-9290CIRCULATOR RC_3686PULSE TRANSFORMER RT-9023MAGNETRON MG54362003/10109P0824H602附录天线单元 RSB-098/099/100/101/102(用于 FAR-2137S-BB)/2837S)FURUNO Model FAR-2137S(BB), FAR-2837S(BB)Unit Antenna Unit RSB-098/099RSB-100/101/102 ELECTRICAL PARTS LIST2006/11SYMBOL NAME REMARKSPRINTED CIRCUIT BOARDTB03P9349IF AMP03P9335PWR 03P9348MD03P9244RFC03P9346MSS MSS-7497 200/220V, 3φMSS MSS-7497A 380/440V, 3φSCANNER CHASSISRSB-09821/26 rpmRSB-09921/26 rpmRSB-10045 rpmRSB-10145 rpmRSB-10245 rpmRF MODULERTR-080MIC ASSEMBLYRU-9760AMOTORRM-7398RSB-098/09921/26 rpm, 200/220V, 3φRM-7435RSB-098/09921/26 rpm, 380/440V, 3φRM-9519RSB-100/101/10245 rpm, 220V, 3φ, 50 HzRM-9520RSB-100/101/10245 rpm, 220V, 3φ, 60 HzRM-9521RSB-100/101/10245 rpm, 440V, 3φ, 60 HzDIODE LIMITERRU-9426CIRCULATORRC_6584SPULSE TRANSFORMERRT-9273MAGNETRONMG5223F附录电源单元 PSU-007(用于 FAR-2137S(-BB)/2837S)FURUNO Model PSU-007Unit Power Supply UnitELECTRICAL PARTS LIST2003/10SYMBOL NAME REMARKSPRINTED CIRCUIT BOARDTB1RELAYHG3_DC12V天线单元 RSB-104/105(用于 FAR-2837SW)FURUNO Model FAR-2837SWUnit Antenna Unit RSB-104/105ELECTRICAL PARTS LIST2003/10SYMBOL NAME REMARKSPRINTED CIRCUIT BOARDTB03P9349BP GEN03P9347MSS MSS-7497 200/220V, φ3MSS-7497-A 380/440V, φ3MOTORRM-7398RSB-10421 rpm: 200 V, 3φ, 50 HzRSB-10426 rpm: 220 V, 3φ, 60 Hz RM-7345RSB-10521 rpm: 380 V, 3φ, 50 HzRSB-10526 rpm: 440 V, 3φ, 60 Hz附录收发器单元 RTR-082(用于 FAR-2837SW)FURUNO Model FAR-2837SWUnit Transceiver Unit RTR-082ELECTRICAL PARTS LIST2006/11SYMBOL NAME REMARKSPRINTED CIRCUIT BOARDTB03P9349IF AMP03P9335PWR 03P9348MD03P9244RFC03P9346MIC ASSEMBLYRU-9760AMOTOR109P0824H602TR LIMITERTL378ACIRCULATORRC_6584S or RC4910SPULSE TRANSFORMERRT-9273MAGNETRONMG5223F附录部件位置显示单元 MU-231CR(AC 规格)显示单元 MU-231CR,拆除后盖显示单元 MU-231CR,拆除内部屏蔽板附录显示单元 MU-201CR(DC 规格)显示单元 MU-201CR,拆除后盖显示单元 MU-201CR,拆除内部屏蔽板附录控制单元 RCU-014控制单元 RCU-014,拆除后盖控制单元 RCU-015控制单元 RCU-015,拆除后盖附录AP-38 收发器单元 RTR-078/079(用于 FAR-2117(-BB)/2127(-BB)/2817/2827)收发器单元 RTR-078/079(用于 FAR-2117(-BB)/2127(-BB)/2817/2827),上半部分收发器单元 RTR-078(用于 FAR-2117(-BB)/2127(-BB)/2817/2827),下半部分。
船用雷达JMA-7303-C (A)JMA-7253-7 (CA) / 9 (CA) JMA-7252-6 (CA) / 9 (CA) 操作手册JMA-7303雷达第一章操作面板说明注意:本章对所有按键均以中文命名及解说,以后所有章节中涉及到的按键只以英文表示。
附图标号英文名中文名作用(1) [BRIL] [显示屏亮度] 控制显示屏亮度(2) [TUNE] [调谐] 调谐目标回波清晰度(3) [RAIN] 雨雪抑制] 清除雨雪干扰(4) [SEA] [海浪抑制] 清除海浪干扰(5) [GAIN] [增益] 控制雷达接收回波强度(6) [POWER ON] [电源] 雷达电源开关(7) [TX/ST-BY] [发射/预备] 每次开机预热3 分钟后,“ST-BY”显示出来,按一下这个键,雷达开始发射。
(8)- (9) [OFF-OFF] [关电源] 同时按这两个键关闭雷达电源(10) [PANEL] [面板亮度] 控制面板上所有按键和旋钮的亮度(11) [VIDIO] [回波亮度] 控制回波图象亮度(12) [TEST] [测试] 检测显示器功能(13) [OWN TRACK] [本船航迹] 配置导航设备后,可显示本船航迹(14) [RANG RING] [固定距标圈亮度] 控制固定距标圈的显示亮度(15) [VRM] [可变距标圈亮度] 控制可变距标圈的显示亮度(16) [EBL/PI] [方位线] 改变电子方位线及平行线亮度(17) [ARPA/MARK] [ARPA/标志亮度] 控制ARPA功能的矢量,标志的亮度(18) [PI] [平行线] 平行线开关键(19) [MARK] [标记] 按此键显示标记(20) [MARK CLR] [标记取消] 移动光标至标记处按下此键取消标记,连续按下2秒以上取消所有标记(21) [AUTO TUNE] [自动调谐] 进入自动调谐方式(22) [AUTO RAIN] [自动雨雪抑制] 自动调节雨雪抑制强度(23) [AUTO SEA] [自动海浪抑制] 自动调节海浪抑制强度(24) [DATA ENTRY] [数据输入] 数字输入键(25) [MENU] [菜单] 显示菜单(26) [ENTER] [确认] 确认光标指定区域的数据(27) [TRACKBALL] [光标球] 移动光标(28) [EBL] [方位线] 改变电子方位线角度(29) [EBL1/EBL2] [方位线1/方位线2] 选择显示方位线1或方位线2(30) [RANGE RINGS] [固定距标圈] 显示固定距标圈(31) [VRM1/VRM2] [可变距标圈1/2] 选择显示可变距标圈(32) [AZI MODE] [显示模式选择开关] 航向向上、船首向上、正北向上选择(33) [PULSE WIDTH] [脉冲宽度选择] 选择发射脉冲宽度(34) [SHM OFF] [消除船首标志线] 按下此键时,船首线暂时消隐(35) [ALARM ACK] [报警复位] 报警确认、消音(36) [OFF CENTER] [中心偏移] 通过本船中心偏移可扩大观察范围(在半径65%之内)(37) [RANGE] [量程选择] 可选择量程从0.25NM~120NM(38) [TM/RM] [真运动/相对运动选择] 变换真运动或相对运动显示方式(39) [TM/RESET] [真运动复位] 在真运动方式下,把本船位置恢复到屏幕的始发点(40) [TRAILS] [航迹显示] 显示其它船只的航迹(41) [GUARD ZONE] [报警区开关] 显示报警区菜单(42)[PAST POSN] [目标航迹显示] 显示目标航迹和设置目标航迹的记录间隔(43)[VECT TIME] [矢量长度] 设定矢量长度(44)[TRUE REL] [真运动/相对运动航线] 选择真运动或相对运动显示方式(45)[DATA READ] [目标读数] 读取跟踪目标数据(46)[MANUAL] [人工获取目标] 人工跟踪目标开关(47)[AUTO] [自动获取目标] 自动跟踪目标(48)[CANSEL] [取消目标] 清除正在观察的目标的标志及矢量,取消跟踪第二章基本操作2.1 操作流程以上为基本操作流程图,具体操作随后详细介绍。
船⽤雷达技术要求和使⽤要求1. 主题内容和适⽤范围本标准适⽤于船⽤导航雷达。
1.1 ⽆线电频率雷达设备⼯作的⽆线电频率在任何时刻均应在国际电信联盟颁发的“⽆线电规则”所规定的范围内。
2. ⽬的雷达设备应能相对于本船的其他⽔⾯船舶和障碍物、浮标、海岸线以及导航标志的位置,这将有助于导航和避碰。
设备的安装应满⾜该设备所规定的性能标准。
3. 性能要求所有雷达设备均应满⾜下述最低要求。
3.1 作⽤距离在正常传播条件下,当雷达天线架设在海⾯以上15⽶⾼度时,在⽆杂波的情况下,设备应清楚地显⽰出:3.1.1 海岸线⾼度为60⽶的陆地,距离为20海⾥。
⾼度为6⽶的陆地,距离为7海⾥。
3.1.2 ⽔⾯⽬标对5000吨(总吨,下同)的船舶,不管其⾸向如何,距离为7海⾥。
对10⽶长的⼩船,距离为3海⾥。
对有效反射⾯积约10平⽅⽶的导航浮标之类的⽬标,距离为2海⾥。
3.2 显⽰3.2.1 雷达设备应提供⾸向向上⾮稳定相对平⾯位置显⽰,在没有外部放⼤装置的情况下,其有效显⽰直径不⼩于下列规定:3.2.1.1 500 吨到1600 吨以下的船舶为180毫⽶;3.2.1.2 1600 吨到10000 吨以下的船舶为250毫⽶;3.2.1.3 10000 吨和10000 吨以上的船舶,⼀台雷达的显⽰器为340毫⽶,另⼀台雷达的显⽰器为250毫⽶。
3.2.1.4 若放⼤后的显⽰精度在本标准的精度范围内,也可以使⽤光学放⼤装置。
3.2.1.5 与雷达导航或避碰⽆关的任何信息只允许显⽰在屏幕有效直径的外⾯。
3.2.2 设备应供应下列两组显⽰量程中的任⼀组:3.2.2.1 1.5、3、6、12、24海⾥以及⼀档不⼩于0.5海⾥且不⼤于0.8海⾥的量程组;3.2.2.2 1、2、4、8、16、32海⾥的量程组。
3.2.3 设备还可以提供其他量程。
3.2.3.1 所提供的其他量程应⽐第3.3.2条所要求的最⼩量程更⼩,或者⽐第3.3.2条所要求的最⼤量程更⼤。
syhoon船用雷达说明书
一、按下PWR键,绿灯亮,3分钟后出现STAND BY,按下TX/STBY 键,雷达开始工作;再按TX/STBY可停止发射,设备在预备状态。
二、调整SEA、RAIN、GAIN和BRILL钮,选择RANGE量程,调节TURN钮至物标清晰出现在荧光屏上;SEA、RAIN和TURN分别有手动和自动,但是雨雪和海浪不能同时自动。
三、捕捉物标,按下ACQ MANUAL键,移动光标到物标上,按下左键,物标被捕捉。
最多可捕捉50个物标。
四、读取物标数据,按下TGT DATA键,将光标移动到物标上,按下左键,物标数据被读取。
五、取消物标,按下ACQ/CANCEL键,将光标移动到物标上,按下左键,物标被取消。
六、设置方位线、距离圈,按下EBL和VRM键,荧光屏出现方位线、距离圈,旋转EBL和VRM钮,设置方位和距离。
七、按下AZI/MODE键,进行真北、真运动、相对运动等选择。
八、按下PL键改变发射脉冲宽度。
九、按下TRUE/REL、VECT/TIME键进行真矢量和相对矢量选择。
十、按下TM/RM键,进行真运动和相对运动选择。
十一、按下OFF/CENT键进行偏心显示。
船用雷达的操作和使用
船用雷达是船舶上常见的导航设备,它通过发射和接收微波信号来探测周围环境,并提供相关的信息给船舶驾驶员,以确保航行的安全。
以下是关于船用雷达的操作和使用的详细说明。
1.雷达系统组成
船用雷达一般由以下几个部分组成:
-雷达发射器:产生微波信号并向四周发射。
-雷达接收器:接收反弹回来的信号,并将其转化为图像。
-显示器:显示雷达所接收到的图像,并提供相关的信息。
-软件控制系统:用于控制雷达的各项参数和功能。
2.雷达的工作原理
船用雷达利用微波信号来测量和跟踪目标物体的位置和距离。
当雷达发射器发射出的微波信号遇到物体时,一部分信号会被物体反射回来,雷达接收器接收到反射回来的信号后,通过信号处理和图像重建,形成雷达图像。
3.雷达的操作步骤
以下是一般的雷达操作步骤:
-打开雷达开关:将雷达接通电源,打开相关开关。
-设置雷达参数:根据航行需求,设置雷达的工作频率、功率、扫描范围等参数。
-定位雷达:将雷达安装到适当的位置,确保雷达可以360度无阻碍的扫描周围环境。
-调整雷达扫描模式和范围:根据航行需求,调整雷达的扫描模式和范围,可以选择水平扫描、垂直扫描、或者组合扫描等模式。
-观察雷达图像:通过观察雷达的显示器,获取周围环境的信息,包括航道、目标物体、岩礁、其他船只等。
-自动或手动跟踪目标:根据需要,雷达可以根据用户设置自动跟踪目标,也可以手动选择跟踪目标。
-分析和决策:根据雷达提供的信息,船舶驾驶员进行分析和决策,选择适当的航向和航速。
4.雷达的使用注意事项
在使用船用雷达时,需要注意以下几个方面:
-正确设置雷达参数:根据航行条件和需求,合理设置雷达的频率、功率、扫描范围等参数,以获取准确的雷达图像。
-关注目标物体:通过观察雷达图像,及时发现与船只航行有关的目标物体,如其他船只、浮标、岩礁等,并根据需要采取相应的行动。
-定期校准雷达:定期对雷达进行校准和维护,以确保其准确性和可靠性,同时保持雷达设备的清洁。
-结合其他导航设备使用:雷达可以与其他导航设备如GPS、电子海图等结合使用,以提供更全面、准确的导航信息。
总结起来,船用雷达的操作和使用需要根据航行需求和条件,正确设置参数,观察雷达图像,及时发现和处理与船只航行有关的目标物体,结合其他导航设备使用,以确保航行的安全和顺利。