opevcv lsd线段提取
- 格式:docx
- 大小:3.89 KB
- 文档页数:3
CAD软件中的边界边线提取技巧边界边线提取是CAD软件中常用的功能之一,它可以帮助用户从复杂的图形中提取所需的边界信息。
本文将介绍一些常用的边界边线提取技巧,以帮助读者更加高效地使用CAD软件。
1. 使用边界命令大多数CAD软件都提供了边界命令,可以通过该命令轻松提取封闭图形的边界线。
通常,只需选择要提取边界的对象,然后运行边界命令,软件将自动识别并提取边界线。
2. 利用闭合多段线在某些情况下,封闭图形可能由多条线段组成,此时可以使用闭合多段线来提取边界线。
首先,将多个线段绘制为一条闭合多段线,然后使用编辑命令将其转换为边界线。
这样可以简化提取边界的过程。
3. 利用Hatch工具Hatch工具通常用于填充图案或色彩,但它也可以作为边界边线提取的有效工具。
选择要提取边界的区域,然后使用Hatch工具将其填充为一个特殊的图案,接着使用编辑命令将该图案转换为边界线即可。
4. 使用轮廓提取命令部分CAD软件还提供了轮廓提取命令,可以非常便捷地提取曲面或实体模型的边界线。
通过选择一个或多个曲面或实体,运行轮廓提取命令,软件将自动识别并提取物体的轮廓边界。
5. 利用边缘检测工具一些CAD软件还提供了边缘检测工具,可以帮助用户快速找到并提取图形的边界线。
通过选择一个或多个对象,运行边缘检测命令,软件会自动识别并突出显示对象的边缘线。
然后,用户可以进一步编辑并提取所需的边界线。
本文介绍了CAD软件中常用的边界边线提取技巧,包括使用边界命令、闭合多段线、Hatch工具、轮廓提取命令以及边缘检测工具等。
通过灵活运用这些技巧,用户可以更高效地提取和处理图形的边界线,提升CAD软件的应用效果和工作效率。
希望读者能够在实际使用中运用这些技巧,提升自己的CAD软件操作水平。
lsd线特征提取算法标题:理解与应用LSD(Linear Segment Detector)线特征提取算法一、引言LSD (Linear Segment Detector) 算法,是一种高效的直线检测和描述方法,由Gioi, T.等人在2010年提出。
该算法主要用于图像处理领域,尤其擅长于复杂背景下精确、完整地检测出图像中的线性结构,具有抗噪声能力强、不受尺度影响以及对图像旋转和仿射变换稳健等优点。
二、LSD算法原理LSD算法基于边缘检测、梯度直方图统计以及拟合优化等技术实现。
其主要步骤如下:1. **边缘检测**:首先通过计算图像的一阶和二阶导数得到图像的梯度信息,以此为基础寻找潜在的线段起始点。
2. **梯度累积**:在每个可能的起始点周围构建梯度直方图,并通过累积梯度强度和方向信息来定位线段的端点。
3. **线段细化与拟合**:采用贪心策略逐步扩展线段,同时通过最小化误差平方和的方式拟合最优线段参数,确保检测出的线段尽可能贴近实际线性结构。
4. **多尺度处理**:算法通过多尺度分析,能够在不同尺度下稳定地检测出线段,从而能够处理各种尺度的线性特征。
5. **非极大值抑制**:为了避免同一线性结构被重复检测,算法最后采用了非极大值抑制方法去除冗余的线段检测结果。
三、LSD算法优势相比于传统的霍夫变换和其他直线检测方法,LSD算法有以下显著优势:- 高效性:算法设计考虑了实时性和效率,适合大规模图像数据的处理。
- 精度高:能有效提取图像中宽度极小或存在大量噪声的线性特征。
- 多尺度性:能够适应图像中线性结构的各种尺度变化。
- 旋转不变性:对于图像的旋转操作具有良好的鲁棒性。
四、应用领域LSD算法广泛应用于各种需要进行线性特征提取的场景,例如自动驾驶中的道路标志识别、遥感图像的道路网络提取、建筑图纸的线条识别、工业视觉中的零部件边缘检测等。
总结,LSD线特征提取算法凭借其高效精准的特点,在图像处理和计算机视觉领域扮演着重要角色,是现代图像分析与理解工具箱中的一个重要组成部分。
OpenCV获取图像中直线上的数据具体流程需求说明在对图像进⾏处理时,经常会有这类需求:客户想要提取出图像中某条直线或者ROI区域内的感兴趣数据,进⾏重点关注。
该需求在图像检测领域尤其常见。
ROI区域⼀般搭配Rect即可完成提取,直线数据的提取没有现成的函数,需要⾃⾏实现。
当直线为纵向或者横向时,⽐较简单,只需要从起点到终点提取该⾏或者列的数据即可;但是直线若为斜向的,则需要从起点出发,向终点⽅向逐个像素提取。
⼤家都知道,图像是由许多像素组成,⽽斜向直线的数据提取路线并不⼀定就是标准的斜线,也可能是呈阶梯状的路线,⽽如何进⾏路线设计,就是本⽂所要展⽰的内容。
具体流程1)建⽴vector<pair<float,int>> result容器⽤于存放数据,设置初始化参数。
其中,inImage是输⼊图像,start为起点,end为终点,点的类型为cv::Point。
vector<pair<float, int>> result;int row = inImage.rows;int col = inImage.cols;int r1 = start.y;int c1 = start.x;int r2 = end.y;int c2 = end.x;2)确定两点间距离dist,将起点到终点的横坐标差和纵坐标差进⾏勾股定理可得。
所得距离可能为带⼩数的数据,然⽽像素的个数都为整数,所以进⾏四舍五⼊。
除此之外,还要判断下距离,若距离为0,则只返回起点数据。
float dist = round(sqrt(pow(float(r2) - float(r1), 2.0) + pow(float(c2) - float(c1), 2.0)));if (dist <= 0.00001f) {pair<float, int> temp;temp.first = inImage.at<float>(r1, c1);temp.second = 0;result.push_back(temp);return result;}3)确定横向纵向的步进间隔。
飞思卡尔智能车摄像头边线、黑线提取方法分析
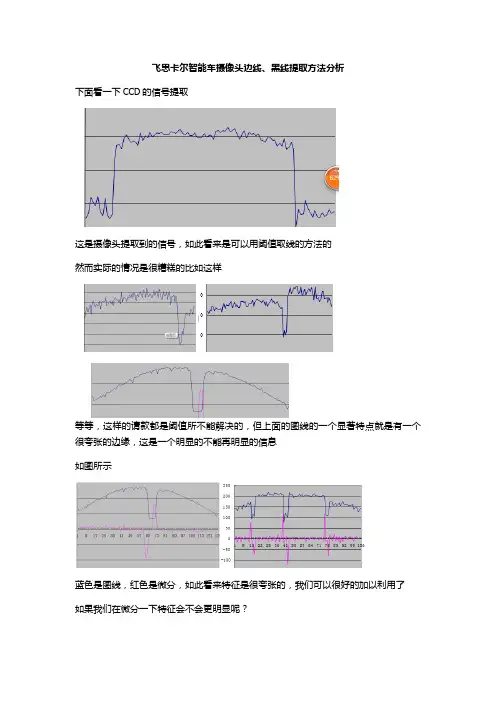
下面看一下CCD的信号提取
这是摄像头提取到的信号,如此看来是可以用阈值取线的方法的
然而实际的情况是很糟糕的比如这样
等等,这样的请款都是阈值所不能解决的,但上面的图线的一个显著特点就是有一个很夸张的边缘,这是一个明显的不能再明显的信息
如图所示
蓝色是图线,红色是微分,如此看来特征是很夸张的,我们可以很好的加以利用了
如果我们在微分一下特征会不会更明显呢?
蓝色是原图想,红色是微分,黄色是微分后再微分,如此看来,再微分已经没有什么明显的效果了,还是一次微分比较的好,
现在理一下思路,
第一步取图像
第二步微分
第三步求绝对值
第四步把一些小的值去掉
对于这样的东西我们就很很很容易处理了
但是我们还要注意这样的情况
即便是去掉了一些很小的信号但是还有一些稍大一点的信号这是值得关注的事情
注意:如果是线性ccd的话灰度值的平均水平有时会很低,为了好看可以采用软件放大的做法,个人认为加运放的效果不好,软件放大还可以加入一些智能的判断和操作,12位的AD转换进度完全够用,图像处理其实八位就完全够用啦。
在使用Python进行图像处理时,OpenCV是一个非常强大和常用的库。
它提供了各种各样的功能,包括图像处理、计算机视觉、机器学习等。
其中,激光中心线提取是一个常见的需求,在工业、医学和科研领域都有大量的应用。
本文将介绍如何使用OpenCV和Python来实现激光中心线的提取。
我们将按照以下步骤进行讲解:1. 导入所需的库和模块在开始之前,我们需要导入所需的库和模块。
在Python中,我们可以使用import关键字来导入库和模块。
在这个例子中,我们需要导入OpenCV库和NumPy库。
OpenCV是一个专业的计算机视觉库,而NumPy是一个用于处理数值数据的库。
2. 读取并显示原始图像接下来,我们需要读取原始的图像,并将其显示出来。
在这个例子中,我们假设原始图像中包含了激光的轨迹。
我们可以使用OpenCV的imread函数来读取图像,并使用imshow函数来显示图像。
3. 图像预处理在进行激光中心线的提取之前,我们需要对图像进行一些预处理。
这些预处理的步骤通常包括去噪、边缘检测、二值化等。
在这个例子中,我们可以使用OpenCV的GaussianBlur函数来去噪,使用Canny函数来进行边缘检测,使用threshold函数来进行二值化。
4. 激光中心线提取一旦图像经过预处理之后,我们就可以开始进行激光中心线的提取了。
这个过程通常包括寻找轮廓、计算轮廓的中心线等步骤。
在这个例子中,我们可以使用OpenCV的findContours函数来寻找轮廓,使用approxPolyDP函数来对轮廓进行逼近,最后使用fitLine函数来拟合轮廓的中心线。
5. 显示结果并保存我们可以将提取得到的激光中心线显示出来,并将结果保存为新的图像文件。
我们可以使用OpenCV的line函数来绘制中心线,使用imwrite函数来保存结果图像。
通过以上步骤,我们可以很容易地使用OpenCV和Python来实现激光中心线的提取。
CAD中图形抽取的技巧在CAD软件中,图形抽取是一项非常重要的技术,它可以帮助我们从已有的图形中提取特定的线、点或曲线,以便进一步编辑或分析。
本文将介绍一些常用的图形抽取技巧,帮助读者更好地应用CAD软件。
1. 线段抽取:在CAD软件中,我们经常需要测量或标注线段的长度。
使用线段抽取功能可以轻松获得所需的线段长度。
选择“线段抽取”工具后,点击起点和终点,即可获取它们之间的长度。
2. 垂直线抽取:在CAD中绘制垂直线段时,可以使用垂直线抽取功能来确保线段朝垂直方向绘制。
选择“垂直线抽取”工具,然后选择基准线段的一个端点,即可绘制与之垂直的线段。
3. 水平线抽取:与垂直线抽取类似,使用水平线抽取功能可以确保线段朝水平方向绘制。
选择“水平线抽取”工具,然后选择基准线段的一个端点,即可绘制与之水平的线段。
4. 偏移线抽取:当需要在已有曲线或边界基础上创建平行线段时,可以使用偏移线抽取功能。
选择“偏移线抽取”工具,然后选择要偏移的曲线或边界,指定偏移距离,即可得到相应的偏移线段。
5. 曲线抽取:在CAD中,我们常常需要绘制与已有曲线或边界相似的曲线。
使用曲线抽取功能可以轻松地在已有曲线上提取相应的点来绘制出与之相似的曲线。
选择“曲线抽取”工具,然后选择基准曲线上的点,即可获取该点的坐标,从而绘制出相应的曲线。
6. 圆心抽取:在CAD中,通过已有的圆绘制其他几何图形或进行测量是常见的操作。
使用圆心抽取功能可以方便地提取出已有圆的圆心坐标,从而进行后续操作。
选择“圆心抽取”工具,然后选择已有圆上的三个点(不共线),即可获取圆心坐标。
7. 交点抽取:当两个线段或曲线相交时,我们可能需要获取它们的交点坐标。
使用交点抽取功能可以轻松获得重合部分的交点坐标。
选择“交点抽取”工具,分别选择两个线段或曲线的交叉点,即可获取其坐标。
以上介绍了一些常用的CAD图形抽取技巧,通过运用这些技巧,您可以更高效地进行CAD绘图和编辑工作。
lsd线特征提取算法
摘要:
1.线特征提取算法简介
2.LSD 线特征提取算法的原理
3.LSD 线特征提取算法在实际应用中的优势
4.LSD 线特征提取算法的实现
5.总结
正文:
1.线特征提取算法简介
线特征提取算法是一种从图像中提取直线特征的方法,这些直线特征在视觉感知和描述外部环境时具有重要意义。
线特征提取算法广泛应用于目标检测、识别和跟踪等领域,可以提高系统的精度和鲁棒性。
2.LSD 线特征提取算法的原理
LSD(Line Segment Detector)线特征提取算法是一种基于亚像素级精度检测的线段检测算法。
它能够在短时间内获得较高精度的线段检测结果,具有较好的光照和视角不变性特点。
LSD 算法通过计算图像中相邻像素点的梯度幅值和方向,来判断是否存在直线特征。
当梯度幅值大于一定阈值且方向一致时,认为该像素点处于直线上,从而提取出直线特征。
3.LSD 线特征提取算法在实际应用中的优势
LSD 线特征提取算法具有以下优势:
- 快速:在较短的时间内获得较高精度的线段检测结果;
- 高效:可以实现在线性时间内得到亚像素级精度的检测结果;- 稳定:具有较好的光照和视角不变性特点,适用于不同场景;- 鲁棒:能适应不同尺度、旋转和光照条件下的目标检测和识别。
4.LSD 线特征提取算法的实现
LSD 线特征提取算法的实现主要依赖于OpenCV 库。
提取道路中心线算法
道路中心线是道路设计和规划中的重要参数,在GIS和地图制图中也有着广泛的应用。
提取道路中心线算法是一种常见的图像处理技术,其目的是从道路图像中自动提取出道路中心线。
道路中心线的提取可以通过多种方法实现,其中最常见的是基于图像处理算法的方法。
这些算法通常涉及到图像预处理、边缘检测、线性拟合等步骤,最终得到一条尽可能准确的道路中心线。
在图像预处理阶段,需要对输入的道路图像进行平滑处理、灰度化、二值化等操作,以便更好地进行后续的边缘检测和线性拟合。
边缘检测是提取道路中心线的关键步骤之一,其目的是从图像中提取出道路边缘的信息。
常用的边缘检测算法包括Sobel算子、Canny 算子等。
接下来,需要对检测到的道路边缘进行线性拟合,以得到最终的道路中心线。
线性拟合通常采用的是最小二乘法,其目的是找到一条贴合道路边缘的直线,并将其作为道路中心线输出。
需要注意的是,提取道路中心线的算法必须考虑到道路的曲线、交叉口等特殊情况。
在这些情况下,算法需要具备一定的鲁棒性和自适应性,以保证提取出的道路中心线能够准确地反映实际道路的情况。
总体而言,提取道路中心线算法是一项复杂而重要的图像处理技术,其应用范围广泛,对于道路设计、交通规划及地图制图等领域都有着重要的意义。
- 1 -。
Opencv四边形区域提取1. 简介在图像处理和计算机视觉领域,我们经常需要从图像中提取特定的区域以进行后续的分析和处理。
而四边形区域是一种常见的感兴趣区域(ROI),例如在文档识别、车牌识别、目标跟踪等应用中都需要对四边形进行提取和处理。
Opencv是一个广泛使用的开源计算机视觉库,它提供了丰富的函数和工具来处理图像和视频。
本文将介绍如何使用Opencv来实现四边形区域的提取。
2. 准备工作在开始之前,我们需要确保已经安装了Opencv库,并且能够正常导入。
可以通过以下命令来安装Opencv:pip install opencv-python同时,我们还需要准备一张包含四边形区域的图像作为输入。
3. 四边形检测首先,我们需要检测出图像中的四边形。
Opencv提供了多种方法来进行角点检测和轮廓检测,这里我们选择使用轮廓检测方法。
import cv2# 读取输入图像image = cv2.imread("input.jpg")# 将图像转换为灰度图gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# 使用Canny边缘检测算法edges = cv2.Canny(gray, 50, 150)# 进行轮廓检测contours, _ = cv2.findContours(edges, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMP LE)在上述代码中,我们首先将输入图像转换为灰度图,然后使用Canny边缘检测算法找到图像的边缘。
接下来,我们使用Opencv的findContours函数来进行轮廓检测,返回所有的轮廓。
4. 四边形筛选由于轮廓检测可能会返回很多不规则形状的轮廓,我们需要对这些轮廓进行筛选,只保留符合条件的四边形。
这里我们可以利用四边形的特点:四个角点、四条直线和四个内角。
import numpy as np# 定义函数判断一个轮廓是否是四边形def is_quadrilateral(contour):# 近似多边形曲线epsilon = 0.02 * cv2.arcLength(contour, True)approx = cv2.approxPolyDP(contour, epsilon, True)# 判断是否有四个角点if len(approx) != 4:return False# 判断是否有四条直线lines = cv2.HoughLinesP(edges, 1, np.pi/180, threshold=100, minLineLength= 100, maxLineGap=10)if lines is None or len(lines) != 4:return False# 判断是否有四个内角angles = []for i in range(4):p1 = approx[i][0]p2 = approx[(i+1)%4][0]p3 = approx[(i+2)%4][0]v1 = np.array(p1) - np.array(p2)v2 = np.array(p3) - np.array(p2)angle = np.arccos(np.dot(v1, v2) / (np.linalg.norm(v1) * np.linalg.nor m(v2)))angles.append(angle)if len(set(angles)) != 4:return Falsereturn True# 筛选出符合条件的四边形轮廓quadrilaterals = [contour for contour in contours if is_quadrilateral(contour)]在上述代码中,我们定义了一个is_quadrilateral函数来判断一个轮廓是否是四边形。
图形编程的直线提取原理
直线提取是指从图像中获取直线的过程,常用于计算机视觉和计算机图形学领域。
直线提取可以用于许多应用,例如边缘检测、物体检测、图像修复等。
常用的直线提取算法包括:
1. Hough变换:Hough变换是一种基于数学原理的直线提取方法。
它通过将图像中的每个像素点转换为参数空间上的一条曲线,并统计曲线的交点来检测直线。
Hough变换的优点是对噪声和缺失数据具有较好的鲁棒性。
2. Canny边缘检测:Canny边缘检测是一种经典的边缘检测算法,也可以用于直线提取。
它通过在图像中寻找边缘像素点,并通过非极大值抑制和双阈值处理来提取直线。
3. 线段检测算法:线段检测算法通过寻找连续的边缘像素点并拟合直线来提取直线。
常见的线段检测算法有LSD(Line Segment Detector)和MSER (Maximally Stable Extremal Regions)等。
这些算法的原理大致相同,都是通过分析图像的边缘信息来提取直线。
具体实现中,通常会对图像进行预处理,例如灰度化、滤波、二值化等,以增加直线提取的效果。
同时,鲁棒性处理也是一个重要的方面,常见的处理方法有去除不连续
的边缘点、滤除过短或过长的直线段等。
CAD曲面线条提取与变形技巧CAD软件是一种常用于工程设计和绘图的工具。
在工程设计中,曲面线条的提取和变形是非常重要的技巧。
本文将介绍如何使用CAD软件进行曲面线条的提取和变形,以帮助读者更好地运用CAD进行工程设计。
一、曲面线条提取技巧1. 打开CAD软件并导入相关模型。
首先,在CAD软件中打开目标模型。
可以通过“文件”-“导入”或者直接将模型文件拖拽到CAD软件的工作区来载入模型。
2. 选择曲面线条提取工具。
在CAD软件的工具栏中,找到“曲面线条提取”工具。
不同的CAD软件可能工具的名称和位置会有所不同,但一般都会有相应的曲面线条提取工具。
3. 选择提取曲面线条的区域。
使用鼠标在模型上选取要提取曲面线条的区域。
可以选择整个模型,也可以只选择部分曲面。
4. 提取曲面线条。
点击曲面线条提取工具,CAD软件会自动识别选定区域的曲面线条,并将其提取出来。
可以根据需要进行调整和修改。
二、曲面线条变形技巧1. 打开CAD软件并导入相关模型。
同样,在CAD软件中打开目标模型。
2. 选择曲面线条变形工具。
在CAD软件的工具栏中,找到“曲面线条变形”工具。
不同的CAD 软件可能工具的名称和位置会有所不同,但一般都会有相应的曲面线条变形工具。
3. 选择要变形的曲面线条。
使用鼠标在模型上选取要进行变形的曲面线条。
可以选择整个曲面线条,也可以只选择部分。
4. 进行曲面线条变形。
点击曲面线条变形工具,CAD软件会根据选定的曲面线条进行变形操作。
具体的变形方式可以根据需要进行设置和调整。
至此,我们介绍完了CAD曲面线条提取与变形的基本技巧。
通过这些技巧,读者可以更加灵活地运用CAD软件进行工程设计。
在实际应用中,还可以结合其他功能和工具,进一步扩展和优化设计效果。
希望这些技巧对于读者在CAD软件的使用中能够有所帮助。
2016年第11期总第180期科技广场基于LSD的低空影像线特征提取罗超熊国飞(南昌市城市规划设计研究总院,江西南昌330038)摘要:本文通过分析传统LSD(Line Segment Detection)线特征提取算法的特点,结合低空影像,针对其缺点进行改进,采取影像分块和线段优化等手段使其更加适用于低空影像的线特征提取。
实验结果表明,该方法较为明显的提高了传统LSD算法提取低空影像直线段的效率。
关键词:LSD;低空影像;线段提取;优化中图分类号:P231.5;TP391文献标识码:A文章编号:1671-4792(2016)11-0016-05Low Altitude Image Line Feature Extraction Based on LSDLuo Chao Xiong Guofei(Nanchang City Planning Design and Research,Jiangxi Nanchang330038)Abstract:This paper analyzes the advantages and disadvantages of the traditional LSD(Line Segment Detection)linefeature extraction algorithm.To overcome its shortcomings,we propose the methods,like image segmentation andline segment optimization,which can make it more suitable for low-altitude image line features extract.The experi-mental results show that the proposed method can improve the efficiency of the traditional LSD algorithm in extract-ing low-altitude image segment.Keywords:LSD;Low Altitude Image;Line Segment Extraction;Optimization0引言影像中的直线特征是视觉感知的重要线索和解释图像的基本依据[1]。
机器视觉 opencvsharp lsd 函数用法在机器视觉中,OpenCV 是一个广泛使用的开源计算机视觉库,而OpenCvSharp 是OpenCV 的 .NET 封装。
LSD(Line Segment Detector)是一种用于检测图像中直线的算法。
下面是使用OpenCvSharp 中的 LSD 函数的一般用法:using OpenCvSharp;using OpenCvSharp.Extensions;class Program{static void Main(){// 读取图像Mat image = Cv2.ImRead("path/to/your/image.jpg");// 转换为灰度图像Mat gray = new Mat();Cv2.CvtColor(image, gray, ColorConversionCodes.BGR2GRAY);// 使用 LSD 算法检测直线LineSegmentPoint[] lines = Cv2.HoughLinesP(1/ 3gray, // 输入灰度图像1, // rho 值的精度,一般为 1Math.PI / 180, // theta 值的精度,一般为Math.PI / 180threshold: 50, // 阈值,根据实际情况调整minLineLength: 30, // 最短直线长度maxLineGap: 10 // 直线之间的最大间隙);// 在原始图像上绘制直线foreach (var line in lines){Cv2.Line(image, line.P1, line.P2, Scalar.Red, 2);}// 显示结果Cv2.ImShow("LSD Result", image);Cv2.WaitKey(0);}}2/ 3请确保你已经安装了OpenCvSharp 包,你可以通过NuGet 包管理器或 .NET CLI 进行安装:dotnet add package OpenCvSharp4在上面的示例中,我们首先读取图像,然后将其转换为灰度图像。
lsd线特征提取算法【原创版】目录一、引言二、LSD 线特征提取算法的原理与实现1.LSD 算法的简介2.LSD 算法的线段检测原理3.LSD 算法的线特征提取方法4.LSD 算法在 OpenCV 中的实现三、LSD 线特征提取算法的应用1.视觉感知与环境描述2.提高系统精度和鲁棒性四、总结正文一、引言随着计算机视觉技术的不断发展,人们对于图像的理解和分析能力不断提高。
在图像特征提取方面,线特征作为一种重要的视觉特征,具有光照和视角不变性特点,表现更为稳定、有效。
因此,研究线特征提取算法对于计算机视觉领域具有重要意义。
本文将介绍一种线特征提取算法——LSD 线特征提取算法,并对其原理与实现进行详细阐述。
二、LSD 线特征提取算法的原理与实现1.LSD 算法的简介LSD(Line Segment Detector)算法是一种线段检测算法,可以在线性时间内得到亚像素级精度的检测结果。
它是由 Rafael Grompone von Gioi、Jeremie Jakubowicz、Jean-Michel Morel 和 Gregory Shaker 等人于 2005 年提出的。
2.LSD 算法的线段检测原理LSD 算法的基本思想是通过计算图像中像素点之间的距离,判断哪些像素点组成线段。
具体来说,对于图像中的每一个像素点,LSD 算法会计算其邻域像素点之间的距离,然后根据距离阈值判断这些像素点是否组成线段。
3.LSD 算法的线特征提取方法LSD 算法在检测线段的同时,还可以提取线段的特征。
具体来说,对于检测到的线段,LSD 算法会根据线段的方向和长度提取线段的参数。
这些参数可以用来描述线段的形状和位置,从而作为线特征进行使用。
4.LSD 算法在 OpenCV 中的实现OpenCV 是一个开源的计算机视觉库,提供了丰富的图像处理功能。
在 OpenCV 中,可以通过调用 LineSegmentDetector 类实现 LSD 算法。
点线结合PL-VINS:线特征提取(feature-tracker)代码整理笔记linefeature_tracker本⽂重点关注PL-VINS该框架下的LSD线特征提取部分的代码整理解读,感谢原作者⽼师们的分享。
在PL-VIO中直接调⽤了OpenCV旧版本的LSD线段检测器#include<opencv2/line_descriptor/descriptor.hpp>using namespace cv::line_descriptor;但可能由于著作权等⼤⼈的原因,OpenCV3.4.6及以后版本已经将LSD线特征提取算法从代码中剔除了。
因此我们可以选择使⽤旧版本的OpenCV,亦或者基于新版本OpenCV把原LSD库代码打包成库,加⼊我们的⼯程代码中即可直接调⽤。
linefeature_tracker.h// #include <opencv2/line_descriptor.hpp>#include"line_descriptor_custom.hpp"在项⽬中include⾃⼰⽣成的 line_descriptor_custom.hpp 库即可使⽤。
struct Line{Point2f StartPt;Point2f EndPt;float lineWidth;Point2f Vp;Point2f Center;Point2f unitDir;// [cos(theta), sin(theta)]float length;float theta;// para_a * x + para_b * y + c = 0float para_a;float para_b;float para_c;float image_dx;float image_dy;float line_grad_avg;float xMin;float xMax;float yMin;float yMax;unsigned short id;int colorIdx;};虽然代码中给线特征定义了许多属性,但仅有两个端点的坐标和线段长度被⽤到,在运⾏LineFeatureTracker::readImage(const cv::Mat &_img) 读取图⽚并提取线段时,将由LSD库的线段检测算⼦所提取出的KeyLine类线特征转换成本框架下所定义的到的Line类线特征,并赋值端点坐标和线段长度。
learned线段检测算法英文回答:Learned Line Segment Detector (LSD)。
The Learned Line Segment Detector (LSD) is a line segment detection algorithm that uses a machine learning approach to detect straight lines in images. It was developed by Rafael Grompone von Gioi, Jérémie Jakubowicz, Jean Michel Morel, and Gregory Randall in 2012.LSD is based on the idea that line segments can be characterized by their local image properties. Thealgorithm first computes a set of local features for each pixel in the image. These features include the pixel's intensity, gradient, and curvature.The algorithm then uses a machine learning classifierto learn a function that maps these local features to the probability of a pixel being on a line segment. Theclassifier is trained on a dataset of images that have been manually annotated with line segments.Once the classifier has been trained, it is applied to the input image to produce a probability map. The probability map indicates the likelihood of each pixel being on a line segment.The final step of the algorithm is to extract line segments from the probability map. This is done by thresholding the probability map and then connecting the resulting connected components.LSD is a fast and accurate line segment detection algorithm. It can be used to detect line segments in a variety of images, including natural images, man-made images, and medical images.Applications of LSD.LSD has a wide range of applications, including:Object recognition.Image segmentation.Medical imaging.Remote sensing.Industrial inspection.Advantages of LSD.Fast and accurate.Can detect line segments in a variety of images. Easy to use.Disadvantages of LSD.Can be sensitive to noise.Can miss line segments that are not well-defined.中文回答:学习型线段检测算法 (LSD)。
基于改进的LSD线特征提取算法研究
谭帅奇;孙皓;李健铭
【期刊名称】《现代计算机》
【年(卷),期】2024(30)6
【摘要】基于LSD直线段检测算法可能导致直线提取碎片化的问题,提出了改进的LSD线特征检测算法,根据角度和距离对直线进行筛选,解决了直线提取碎片化问题,采用LBD(line band discriptor)描述相邻帧图像之间的线特征相似度,提高了视觉SLAM位姿优化的计算效率,在公开数据集上对LSD算法与改进后的算法进行对比实验。
结果表明,改进后的LSD在匹配精度上提升了27.8%。
【总页数】4页(P69-72)
【作者】谭帅奇;孙皓;李健铭
【作者单位】重庆工商职业学院电子信息工程学院;重庆理工大学管理学院
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于LSD的低空影像线特征提取
2.基于统计中心线的目标特征提取算法研究
3.基于改进LSD的立体组合靶标自动编码算法研究
4.基于等高线的地形特征提取算法研究
5.基于改进LSD的HTCC板错位检测算法研究及应用
因版权原因,仅展示原文概要,查看原文内容请购买。
opevcv lsd线段提取
LSD线段提取是基于OpenCV图像处理库的一种算法,用于从图像中提取直线段。
本文将介绍LSD线段提取的原理、应用领域和优缺点。
一、LSD线段提取原理
LSD(Line Segment Detector)线段提取算法是一种基于边缘检测的直线段提取方法。
它通过分析图像中的边缘信息,识别出其中的直线段,并给出直线段的起点和终点坐标。
LSD算法主要包括以下几个步骤:
1. 边缘检测:使用Canny边缘检测算法对图像进行预处理,提取出图像中的边缘信息。
2. 候选线段生成:根据边缘信息,生成候选直线段。
LSD算法采用了一种基于区域的策略,在不同的尺度上对边缘进行分组,生成候选直线段。
3. 直线段合并:对生成的候选直线段进行合并,得到最终的直线段结果。
LSD算法采用了一种自底向上的策略,从低层次的直线段开始合并,逐渐扩大范围,直到合并完所有相关的直线段。
二、LSD线段提取应用领域
LSD线段提取算法在计算机视觉和图像处理领域有着广泛的应用。
以下是一些常见的应用领域:
1. 机器人导航:LSD线段提取可以用于识别机器人环境中的直线障碍物,帮助机器人规划路径和避免碰撞。
2. 道路检测:LSD线段提取可以用于车道线检测,帮助自动驾驶车辆实现道路规划和车道保持功能。
3. 工业检测:LSD线段提取可以用于检测工业产品中的缺陷,如裂纹、划痕等,帮助提高产品质量和生产效率。
4. 图像分析:LSD线段提取可以用于图像分析和对象识别,帮助计算机理解图像中的结构和内容。
三、LSD线段提取优缺点
LSD线段提取算法具有以下优点:
1. 高效性:LSD算法采用了一种快速的合并策略,可以在很短的时间内处理大量的直线段。
2. 精度高:LSD算法能够有效地识别出图像中的直线段,并给出其准确的起点和终点坐标。
3. 鲁棒性强:LSD算法对图像噪声和光照变化具有较强的鲁棒性,能够适应不同的图像环境。
然而,LSD线段提取算法也存在一些缺点:
1. 对参数敏感:LSD算法的性能很大程度上取决于参数的选择,需要根据具体应用场景进行调整。
2. 对线段断裂敏感:LSD算法在处理线段断裂的情况下表现较差,容易将断裂的线段分割成多段。
3. 对弧线处理较差:LSD算法主要用于直线段的提取,对于曲线或弧线的提取效果较差。
四、总结
LSD线段提取是一种基于OpenCV的直线段提取算法,具有高效、精确和鲁棒的特点。
它在机器人导航、道路检测、工业检测和图像分析等领域有着广泛的应用。
然而,LSD算法在参数选择、线段断裂和弧线处理方面存在一些局限性。
因此,在实际应用中,需要根据具体情况选择合适的算法和参数,以达到最佳的线段提取效果。