挖掘机负载敏感泵的AMESim动态仿真研究_张骥
- 格式:pdf
- 大小:642.69 KB
- 文档页数:6


基于AMESim和MATLAB的盾构掘进机液压推进系统的联合仿真研究摘要:为研究盾构掘进机液压推进系统的动态性能,实现盾构掘进机施工的精确控制。
通过文献研究法、仿真分析法等研究方法,在分析盾构液压推进系统结构与工作原理的基础上,首先单独利用AMESim对液压推进系统进行建模分析,然后采用AMESim和MATLABA联合仿真的方法,对两类PID控制方案进行了仿真对比分析。
结果表明:盾构掘进机液压推进系统采用流量+压力的复合控制方式,在整个仿真过程中,液压缸的压力与流量波动均较小,满足盾构施工的使用要求;非线性PID控制相比常规PID控制,系统的控制精度更高。
关键词:盾构掘进机;压力流量;非线性PID控制;仿真分析前言盾构掘进机推进系统的动力控制,具有负荷多变、传递功率大、控制精度高、工作环境恶劣的特点[1],因此目前国内外所使用的先进盾构掘进机,普遍都采用了液压系统来实现动力控制。
液压推进系统作为盾构掘进机的关键执行机构,也是实现盾构转向、动力分配控制及姿态调整的主要机构。
正确控制液压推进系统的动作,使盾构掘进机的刀架和刀盘能精确的对刀与进刀,是保障盾构机能顺利施工和准确掘进的关键。
然而在工程实践中,由于地质条件的复杂和各种不可预知外界因素的影响,常易导致盾构机掘进过程中出现偏离目标的情况,有时也需曲线掘进,这都需要合理调整液压推进系统的各分区液压缸的压力与流量来进行实时纠偏和调整,以保证工程施工精度。
为此,本文利用AMESim和MATLABA联合仿真的方法,对盾构掘进机液压推进系统进行建模仿真,研究了系统的动态性能及控制方案的适宜性,并探讨了基于非线性PID控制技术实现系统工况的跟踪控制效果,以保证更高的系统控制精度。
1 液压推进系统结构设计及工作原理1.1 系统结构设计液压推进系统中液压缸的数量及工作压力,主要由盾构掘进机直径和施工负载条件所决定,其关系详见下表1。
表1 盾构掘进机不同直径与液压缸数量及工作压力的关系表[2]盾构掘进机直径(m)液压缸数量(个)液压缸工作压力(kN)4-5 16-20 ≈10005-8 20-30 ≈1500>8 ≥32≈2000本文以某国产改进设计的中型盾构掘进机为例进行分析,其盾构直径为 6.34m,系统中共有22个液压缸,并分为了上、下、左、右四个区进行分区控制设计,如图1所示。
第30卷第1期 青岛大学学报(工程技术版) Vol.30No.1 2 0 1 5年3月JOURNAL OF QINGDAO UNIVERSITY(E&T)Mar.2 0 1 5文章编号:1006-9798(2015)01-0099-06;DOI:10.13306/j.1006-9798.2015.01.020挖掘机负载敏感泵的AMESim动态仿真研究张 骥,张铁柱,程联军,李玉兰(青岛大学机电工程学院,山东青岛266071)摘要:针对挖掘机负载敏感泵液压系统的泄露和摩擦问题,本文基于负载敏感原理建立了负载敏感阀工作时的数学模型,同时运用AMESim软件建立负载敏感泵液压系统仿真模型,并对LS进行仿真分析。
仿真结果表明,通过改变控制系统中负载敏感阀的弹簧刚度、开口形状、阀芯直径及阀芯质量,使系统越来越快的达到平稳状态,且超调量变小,振荡次数逐渐减少;不同开口形状产生不同的流量增益;当阀芯直径为6mm时,出口压力动态曲线最平稳,超调量最理想,这与实际生产中的情况相符合;当阀芯质量为0.5kg时,系统响应快,压力波动幅度较理想。
该研究对负载敏感泵的设计、使用和保养维修具有一定的参考价值。
关键词:负载敏感泵;AMESim模型;动态运行曲线中图分类号:TH322;TH137;TD422.2 文献标识码:A收稿日期:2014-09-12;修回日期:2014-11-08基金项目:863项目(2012AA110407);山东省科技发展计划项目(2013YD03056,2012YD03111)作者简介:张骥(1990-),男,硕士研究生,主要研究方向为柔性及多元动力传动技术。
通讯作者:张铁柱,教授,博士生导师。
Email:qdzhangtz@163.com 负载敏感系统是一种通过传感负载的压力,即流量的综合需求,使泵出口压力和流量随负载变化而变化,从而可提供近似等于负载的需求功率(压力和流量的乘积)。
负载敏感系统由负载敏感(LS)阀、恒压阀和变量泵组成的液压动力回路。
在挖掘机上,负载敏感泵的控制系统用控制阀感应动臂缸、铲斗缸和斗杆缸等负载信号,调整变量泵的输出流量和压力,以匹配负载的需求。
避免普通挖掘机中由溢流阀和节流阀产生的溢流和节流损失,具有能量损失小、利用率高等特点。
对于液压系统的研究,杨益明等人[1]采用解析法对负载敏感节流调速回路进行研究;王纪森等人[2]采用键合图法对负载敏感系统进行仿真分析。
对于液压系统中LS阀的研究,姚平喜等人[3]只对其动态特性进行仿真研究及参数优化,而忽略了液压系统的泄露和摩擦问题。
基于此,本研究应用负载敏感原理,建立了负载敏感泵数学模型,并运用AMESim软件,建立包含泄露和摩擦的负载敏感泵动态仿真模型,并进行变参数仿真,仿真结果验证了模型和参数设置的正确性。
该研究对负载敏感泵的改进提供了理论参考。
1 负载敏感泵的工作原理在实际生产中,提高普通挖掘机能量利用率的方法有两种:一是让负载所需的压力与泵的输出压力相平衡,避免压力损失;二是让变量泵的输出流量正好满足负载的需求,避免供能不足。
负载敏感泵正是将泵的出口压力和流量通过控制系统与负载所需压力和流量匹配,最大限度地提高系统效率。
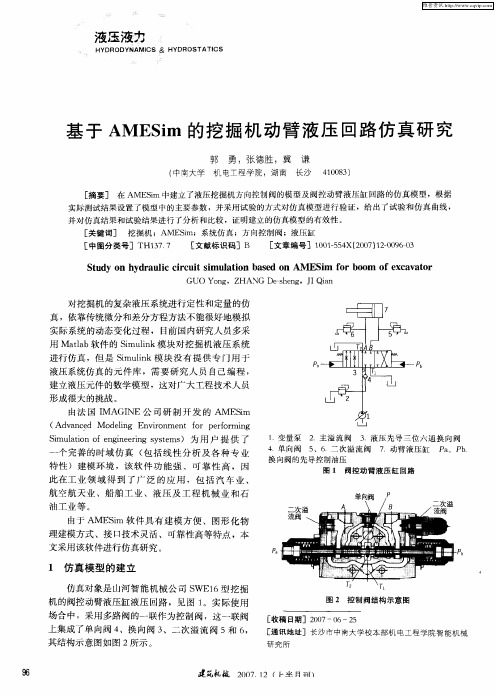
负载敏感泵的工作原理[4-7]图如图1所示。
1.1 自适应状态图1中的pS为泵的出口压力,pL为负载所需压力。
静止时,LS阀的受力平衡方程为(pS-pL)A=FS式中,A为LS阀的有效作用面积;FS为阀芯作用力。
青岛大学学报(工程技术版)第30卷图1 负载敏感泵工作原理 通过调节节流阀的开口大小实现系统为负载提供需要的流量。
当负载的需求减小时,控制信号使节流阀的开口和流量减小,此时变量泵的输出流量超过负载所需流量,使节流阀两侧的压差ΔP=pS-pL增大,即如果(pS-pL)A>FS,油液推动LS阀的阀芯向右移动,同时带有压力的油液依次通过LS阀左位和恒压阀右位进入负载变量缸的敏感腔,由于敏感腔比弹簧腔的作用面积大,因此,在压力作用下使变量泵的斜盘角随即减小,变量泵提供的流量相应减小,直到与负载所需流量相匹配为止;相反,当负载需求增加时,控制信号使节流阀开口增大,负载所需流量大于变量泵输出流量,油液推动LS阀的阀芯向左移动,实现右位工作。
此时,敏感腔的油液经过LS阀右位流回油箱,使变量泵的斜盘角增大,变量泵输出流量相应增大。
1.2 保压或过载状态当上述液压系统处于保压或过载状态时,执行元件两侧油液作用压力相同,LS阀仅在弹簧预紧力的作用下处于右位工作,此时,泵的出口压力pS开始上升,直到大于恒压阀的设定压力。
此过程中,恒压阀的阀芯会受到调节油液的推动而向右移动,油液经过恒压阀左位进入变量缸敏感腔,调节泵的流量减小到仅能维持系统本身控制的程度,此时斜盘角接近0偏角,变量泵的功率消耗最小,实现负载敏感泵节能的设计目的。
1.3 待机状态当上述液压系统处于待机状态时,控制阀必须切断作动油缸(或马达)与液压泵之间的压力信号,节流阀完全关闭,整个系统处于待机状态。
此时,油液会从LS阀左位进入变量缸敏感腔,调节泵的斜盘角逐渐减小,泵的输出流量减至最小,此时,泵的出口压力为LS阀的设定压力,一般只有1.4MPa,以降低待机状态下的能耗[8]。
2 负载敏感泵数学分析由负载敏感泵工作原理可知,负载敏感泵有3种工况:空转工况、普通工况和保压或过载工况。
其中,在空转工况和普通工况下,LS阀感应负载的需求导致阀芯运动,使泵流量变化,以满足负载要求;在保压工况下,恒压阀是通过感应负载的需求而产生的阀芯移动,以此对泵的流量进行调节,满足负载保压的要求。
因此,可对负载敏感泵的工作模型采用独立建模的方法。
而由于LS阀和恒压阀有相似的结构、工作原理与运动过程,所以本研究只建立负载敏感阀工作时的数学模型。
2.1 LS阀动态分析LS阀芯的运动微分方程为(pS-pL-pd)Ax=mxd2 xdt2+Kxx+Bxdxdt(1)式中,pS为变量泵的出口压力,Pa;pL为负载压力,Pa;pd为LS阀的设定压差,Pa;Ax为有效作用面积,m2;mx为阀芯质量,kg;x为LS阀的阀芯位移(向左为正),m;Kx为弹簧刚度系数,N/m;Bx为油液阻尼系数,N·s/m。
对式(1)做拉氏变换,得到LS阀的传递函数为W1(s)=x(s)E(s)=1/Kxs2/ω2()nv+1(2)式中,x(s)表示经过拉压变换后的LS阀芯位移;ωnv=(Ks/Mv槡)为阀芯固有频率,s-1;E(s)为压力偏差信号,E(s)=pS(s)-pL(s())Av;s为拉氏因子,无量纲。
LS阀的流量方程为Q=cdwxx2Δp槡ρ(3)001 第1期 张 骥,等:挖掘机负载敏感泵的AMESim动态仿真研究式中,cd为变量泵的流量系数,m3·s-1/MPa;w为LS阀的开口面积梯度,m;xx表示LS阀的阀芯位移(向左为正),m;ρ为系统工作介质密度,MPa·s2/m2;Δp为LS阀口的前后压降,MPa。
2.2 斜盘的动态方程斜盘角减小时的运动微分方程为p1A1-psA()2r0=J1r0d2 xpdt2(4)式中,p1表示阀芯左移时敏感腔的压力,MPa;A1为变量缸无杆腔作用面积,m2;A2为变量缸弹簧腔有效作用面积,m2;r0为变量活塞中心到中心的距离,m;J为斜盘绕中心轴的转动惯量,kg·m2;xp为变量活塞的位移(向左为正),m。
斜盘角增大时的运动微分方程为psA1-p2A()2r0=J1r0d2 xpdt2(5)式中,p2表示阀芯右移时敏感腔的压力,MPa。
斜盘角减小时,泵输出的流量连续性方程为qv1=A1dxpdt+Vβdp1dt+c0p1(6)偏盘角增大时,泵输出的流量连续性方程为qv2=A1dxpdt-Vβdp2dt-c0p2(7)式中,V为变量缸无杆腔容积,m3;β为有效体积模量,MPa;c0为变量缸的无杆腔泄漏系数,m3·s-1/MPa。
联立式(4)~式(7)可得Kqxv=A1dxpdt+VβJA1r20d3 xpdt3+(Kp+c0)JA1r20d2 xpdt2(8)式中,Kp表示压力排量梯度,MPa/m。
对式(8)进行拉氏变换,得斜盘角工作时的传递函数为W2(s)=xp(s)xvs=Kq/A1ss2ω2n+2δnωns +()1(9)式中,xp(s)和xv(s)分别表示经过拉普拉斯变换后的变量活塞位移的输出和输入量(向左为正);ωn为斜盘固有频率,s-1,ωn=(A1βr20/VJ槡);δn为油液阻尼系数,无量纲,δn=[(ωnKp+c()0J)/(2A21r20)];Kq为泵的流量排量梯度,m2/r。
2.3 变量泵的出口流量和压力输出特性变量泵的流量增量方程为Qp=-Kqnxp(10)式中,Kq为泵的压力排量梯度,m2/r;n为变量泵转速,r/s。
对式(10)做拉氏变换,得变量泵输出流量的传递函数为W3(s)=-Qp(s)xps=Kqn(11)泵的流量输出引起的压力变化用微分方程表示为-Qp+QL-clps=Vtβdpsdt(12)式中,Qp为泵的输出流量;QL为泵的泄露流量,L/s;Vt为泵的出口容腔体积,m3;cl为变量缸弹簧腔的泄漏系数,m3·s-1/MPa。
对式(12)做拉氏变换,得变量泵出口压力的传递函数为W4(s)=ps(s)I(s)=1/cl1+(s/ωT)(13)101青岛大学学报(工程技术版)第30卷式中,I(s)=-Qp(s)+QL(s)为流量偏差信号;ωT=(βcl/V)为转折频率,s-1。
联立式(2),(11),(13),(15),得负载敏感泵整个液压系统传递函数图,如图2所示。
图2 负载敏感泵传递函数图3 建模与仿真分析3.1 负载敏感泵的AMESim模型LMS Imagine.Lab AMESim是由法国的IMAGINE公司基于键合图思想推出的液压/机械仿真软件,该软件具有丰富的模型库,使用者可以根据工作原理,利用标准元件库中的元件进行建模仿真,也可以按照实际物理系统自定义搭建元件[9-10]。
本文根据负载敏感泵的工作原理,利用AMESim中的机械库、信号库、液压库和HCD库等,在草图模式下建立负载敏感泵液压系统仿真模型,结果如图3所示。
图3 负载敏感泵液压系统仿真模型由图3可以看出,该模型简化了油路,忽略了电机的摩擦阻力,并假设油液流动状态为层流,整个液压系统的摩擦在AMESim提供的变量泵参数中设置,泄露问题利用AMESim提供的管路类型进行替代。
液压泵选择Hydraulic库中的变量泵模型,参照力士乐A10VO系列泵的参数,设置排量为160mL/r,信号调整范围为[0,1],转速为2 200r/min;各阀芯的结构由HCD库中自带的模块拼接组成;比例节流阀和溢流阀的开度和溢流压力均使用Signal库的信号控制;比例溢流阀设定电流为200mA;LS阀弹簧刚度为2.4×104N/m,模块质量0.5kg;变量缸弹簧腔活塞直径50mm,阀芯直径是6mm,弹簧刚度为1.5×104 N/m;仿真时间为7s。