第三章-平面连杆机构讲解
- 格式:pptx
- 大小:1.04 MB
- 文档页数:41
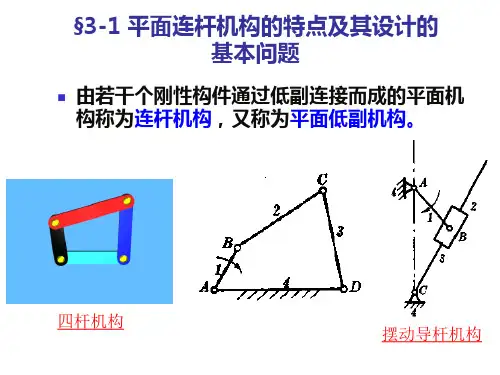
第三章平面连杆机构平面连杆机构是由若干构件和低副组成的平面机构,又称平面低副机构。
这种机构可以实现预期的运动规律及位置、轨迹等要求。
平面连杆机构用于各种机械中,常与机器的工作部分相连,起执行和控制的作用,在工程实际中应用十分广泛。
平面连杆机构的主要优点有:1、低副为面接触,所以压强小,易润滑,磨损少,可以承受较大的载荷。
2、构件结构简单,便于加工,构件之间的接触是由构件本身的几何约束来保持的,故工作可靠。
3、在原动件等速连续运动的条件下,当各构件的相对长度不同时,可使从动件实现多种形式的运动,满足多种运动规律的要求。
其主要的缺点有:1、运动副中存在间隙,当构件数目较多时,从动件的运动累计误差较大。
2、不容易精确地实现复杂的运动规律,机构设计相对复杂。
3、连杆机构运动时产生的惯性力难以平衡,所以不适用于高速场合。
平面连杆机构是常用的低副机构,其中以由四个构件组成的平面四杆机构应用最广泛,而且是组成多杆机构的基础。
因此本章着重讨论平面四杆机构的基本形式及在实际中的应用,理解四杆机构的运动特性及设计平面四杆机构的基本设计方法。
3.1 平面连杆机构及其应用连杆机构有平面连杆机构和空间连杆机构。
其中,若各运动构件均在相互平行的平面内运动,则称为平面连杆机构。
若各运动构件不都在相互平行的平面内运动,则称为空间连杆机构。
平面连杆机构较空间连杆机构应用更为广泛,在平面连杆机构中,结构最简单的且应用最广泛的是由四个构件所组成的平面四杆机构,其它多杆机构可看成在此基础上依次增加杆件而组成。
故本章着重介绍平面四杆连杆机构。
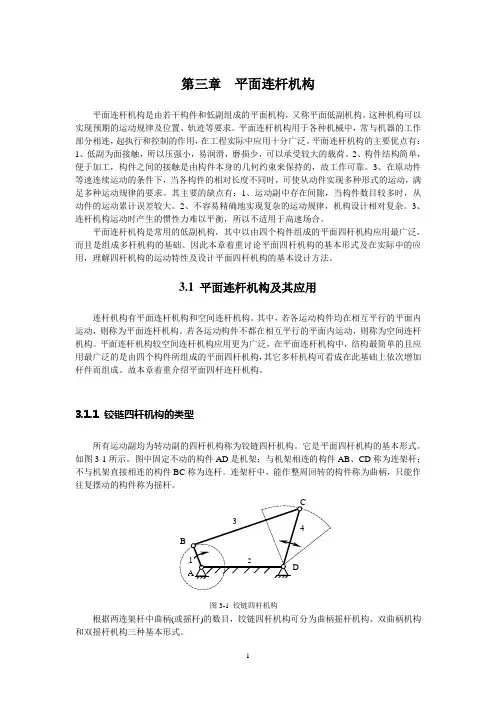
3.1.1铰链四杆机构的类型所有运动副均为转动副的四杆机构称为铰链四杆机构。
它是平面四杆机构的基本形式。
如图3-1所示。
图中固定不动的构件AD是机架;与机架相连的构件AB、CD称为连架杆;不与机架直接相连的构件BC称为连杆。
连架杆中,能作整周回转的构件称为曲柄,只能作往复摆动的构件称为摇杆。
图3-1 铰链四杆机构根据两连架杆中曲柄(或摇杆)的数目,铰链四杆机构可分为曲柄摇杆机构、双曲柄机构和双摇杆机构三种基本形式。
`第三章平面连杆机构机构中的运动副全为低副,称机构为连杆机构。
根据机构中构件的相对运动情况,连杆机构可分为平面连杆机构、空间连杆机构和球面连杆机构。
本章讨论平面连杆机构。
根据平面连杆机构自由度的不同,又可将其分为单自由度、两自由度和三自由度平面连杆机构。
根据运动链的结构型式,可分为开式链和闭式链机构,本章讨论闭式链机构,开式链机构将在第8章中介绍。
对于闭式链机构,一般将机构中含有五个以上构件的平面连杆机构统称为平面多杆机构。
本章主要讨论单自由度平面四连杆机构,简要介绍平面多杆机构。
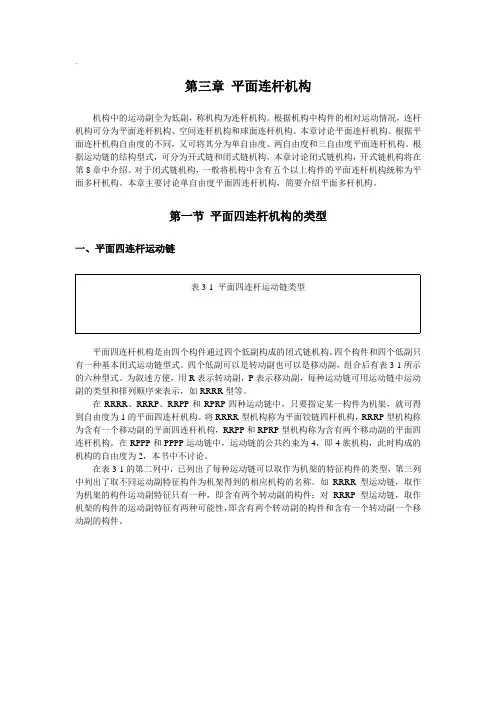
第一节平面四连杆机构的类型一、平面四连杆运动链表3-1 平面四连杆运动链类型平面四连杆机构是由四个构件通过四个低副构成的闭式链机构。
四个构件和四个低副只有一种基本闭式运动链型式。
四个低副可以是转动副也可以是移动副,组合后有表3-1所示的六种型式。
为叙述方便,用R表示转动副,P表示移动副,每种运动链可用运动链中运动副的类型和排列顺序来表示,如RRRR型等。
在RRRR、RRRP、RRPP和RPRP四种运动链中,只要指定某一构件为机架,就可得到自由度为1的平面四连杆机构。
将RRRR型机构称为平面铰链四杆机构,RRRP型机构称为含有一个移动副的平面四连杆机构,RRPP和RPRP型机构称为含有两个移动副的平面四连杆机构。
在RPPP和PPPP运动链中,运动链的公共约束为4,即4族机构,此时构成的机构的自由度为2,本书中不讨论。
在表3-1的第二列中,已列出了每种运动链可以取作为机架的特征构件的类型,第三列中列出了取不同运动副特征构件为机架得到的相应机构的名称。
如RRRR型运动链,取作为机架的构件运动副特征只有一种,即含有两个转动副的构件;对RRRP型运动链,取作机架的构件的运动副特征有两种可能性,即含有两个转动副的构件和含有一个转动副一个移动副的构件。
二、 平面铰链四杆机构图3-1 平面铰链四杆机构对表3-1中的平面铰链四杆运动链,取任一构件为机架,可得到如图3-1所示平面铰链四杆机构。
返回目录第 3章平面连杆机构设计3.1 教课基本要求1.认识构成铰链四杆机构的各构件的名称 ;熟习铰链四杆机构的基本形式、应用和演化 ;掌握行程速比系数、传动角、压力角、死点等的基本观点。
2.能依据四杆机构中存在曲柄的条件 ,娴熟判断出平面四杆机构的基本类型。
3.认识平面四杆机构设计往常采纳的作图法、分析法、实验法和图谱法。
掌握按行程速比系数、给定连杆地点和给定两连架杆对应地点设计四杆机构的作图法。
3.2 要点与难点剖析本章的重点是平面四杆机构的基本特征以及平面四杆机构的设计 ; 难点是用作图法设计四杆机构。
1.极位夹角θ:机构从动件摇杆处于两极限地点时 , 原动件曲柄在相应两位置所夹的锐角。
假如θ≠表0,示机构有急回特征 , 且θ角愈大 ,机构的急回运动就愈明显。
所以要判断一个机构能否有急回特征就要找出极位夹角。
比如 , 一个对心曲柄滑块机构 , 因其极位夹角θ=0,机构就没有急回特征 ,但一个偏置曲柄滑块机构 , 因其极位夹角θ≠机0,构就有急回特征 ; 摆动导杆机构的摆角与其极位夹角相等,它有急回特征 ,但转动导杆机构就没有急回特征。
2.压力角α与传动角γ:在四杆机构中 , 当不计摩擦时 , 主动件通过连杆作用在从动件上的力的作用线与其作用点的速度方向之间所夹的锐角, 称为机构在此地点的压力角。
而把压力角的余角γ即, 连杆与从动摇杆所夹的锐角,称为传动角。
它们常用来权衡机构的传动性能 ,传动角γ愈大 , 即压力角愈小 , 机构的传动性能愈好 ,效率愈高。
多半机构运动中的传动角是变化的, 为了使机构传动质量优秀 , 一般规定机构的最小传动角γmin ≥ 40。
°为了检查机构的最小传动角,需要确立最小传动角的地点。
经过剖析可知:曲柄摇杆机构的最小传动角出此刻曲柄与机架共线的两地点之一;曲柄滑块机构的最小传动角出此刻曲柄与导路垂直的地点 ,导杆机构在任何地点的最小传动角都等于 90 °。
第三章平面连杆机构一、要点解析平面连杆机构是多构件的低副机构。
其中,最基本的平面连杆机构由四个构件组成,称为平面四杆机构。
主要讲述平面四杆机构的基本类型、特性、应用及常用设计方法。
(一)平面四杆机构的类型全部用转动副相连的平面四杆机构称为铰链四杆机构。
它的基本型式是按连架杆的运动形式区分的,应明确连杆、连架杆、整转副、曲柄及摇杆等基本概念。
1.铰链四杆机构的基本形式铰链四杆机构根据两连架杆的运动形式不同,可分为三种形式:(1)曲柄摇杆机构若在铰链四杆机构的两个连架杆中,一个为曲柄,另一个为摇杆,则此四杆机构称为曲柄摇杆机构。
(2)双曲柄机构若四杆机构的两个连架杆均为曲柄,则此四杆机构称为双曲柄机构。
(3)双摇杆机构若四杆机构的两个连架杆均为摇杆,则此四杆机构称为双摇杆机构。
2.铰链四杆机构有整转副和曲柄的条件(1)机构中是否存在具有整转副的构件,仅取决于机构中各构件的相对长度。
不难证明,若机构满足“最短构件与最长构件的杆长之和不大于其余两构件的杆长之和”的条件,则机构中存在具有两个整转副的构件,且必为最短构件。
(2)曲柄存在条件在铰链四杆机构中,两个构件之间所构成的转动副是否为整转副,只是这两个构件之间的相对运动关系,与取哪个构件为固定件无关。
因此,当铰链四杆机构具有两个整转副时,若取不同的构件为固定机架,将分别获取三种型式的机构:最短杆为连架杆时得到曲柄摇杆机构,最短杆为机架时得到双曲柄机构,最短杆为连杆时得到双摇杆机构。
综上所述,判别铰链四杆机构的型式首先要根据机构中各构件的相对杆长条件,确定机构中是否存在具有整转副的构件。
显然,若机构中不存在整转副时,无论取哪个构件为机架,都只能得到双摇杆机构;当机构满足整转副条件时,则需要根据选取哪个构件为固定机架来确定该机构的型式。
3.铰链四杆机构的演化(1)铰链四杆机构的演化型式和途径通过机架变换、改变构件相对长度以及变回转副为移动副等各种途径,铰链四杆机构可有多种演化型式。