控制系统的数学模型
- 格式:ppt
- 大小:3.17 MB
- 文档页数:147

第二章控制系统的数学模型2-1 什么是系统的数学模型?大致可以分为哪些类型?答定量地表达系统各变量之间关系的表达式,称工矿企业数学模型。
从不同的角度,可以对数学模型进行大致的分类,例如:用来描述各变量间动态关系的数学模型为动态模型,用来描述各变量间稳态关系有数学模型为静态模型;数学模型中各变量与几何位置无关的称为集中参数模型,反之与几何位置有关的称为分布参数模型;变量间关系表现为线性的称为线性模型,反之非线性模型;模型参数与时间有关的称为时变模型,与时间无关的称为时不变或定常模型;以系统的输入、输出变量这种外部特征来描述系统特性的数学模型称为输入输出模型,而以系统内部状态变量描述的数学模型称为状态空间模型;等等。
2-2 系统数学模型的获取有哪几种方法?答获取系统数学模型的方法主要有机理分析法和实验测试法。
机理分析法是通过对系统内部机理的分析,根据一些基本的物理或化学变化的规律而导出支配系统运动规律的数学模型,这样得到的模型称为机理模型。
实验测试法是通过对实际系统的实验测试,然后根据测试数据,经过一定的数据处理而获得系统的数学模型,这样得到的模型可称为实测模型或经验模型。
如果将上述两种方法结合起来,即通过机理分析的方法预先得到数学模型的结构或函数形式,然后对其中的某些参数用实验辨识的方法来确定,这样得到的数学模型可称为混合模型。
这是介于上述两种方法之间的一种比较切合实际的应用较为普遍的方法。
2-3 通过机理分析法建立对象微分方程数学模型的主要步骤有哪些?答主要步骤有:⑴根据系统的控制方案和对象的特性,确定对象的输入变量和输出变量。
一般来说,对象的输出变量为系统的被控变量,输入变量为作用于对象的操纵变量或干扰变量。
⑵根据对象的工艺机理,进行合理的假设和简化,突出主要因素,忽略次要因素。
⑶根据对象的工艺机理,从基本的物理、化学等定律出了,列写描述对象运动规律的原始微分方程式(或方程式组)。
⑷消去中间变量,推导出描述对象输入变量与输出变量之间关系的方程式。
第二章控制系统的数学模型第章控制系统的数学模2-1 1 数学模型数学模型本书中主要介绍的几种系统模型图型:信号流程图数学模型描述系统行为特性的数学表达式模方块图信号程图数学模型:微分方程传递函数频率特性一、数学模型:描述系统行为特性的数学表达式。
是对实际物理系统的一种数学抽象。
模型各有特点,使用时可灵活掌握。
若分析研究系统的动态特性,取其数学模型比较方便;若分析研究系统的内部结构情况,取其物理模型比较直观;若两者皆有,则取其图模型比较合理。
11——1.1. 控制系统的时域数学模型控制系统的时域数学模型微分方程r(t)——输入量c(t)c(t)a dc(t)a c(t)d a d a ++++L L dr(t)r(t)d r(t)db 其中,(i =0,1,2,…….n; j =0,1,2…….m) 均为实数,b a r(t)b b ++++=L L b (,,,;j ,,)实,j i2——定定常条输的变2.2.控制系统的复域数学模型控制系统的复域数学模型传递函数A. 定义:线性定常系统在初始条件为零时,输出量的拉氏变设:输入----r(t),输出----c(t),则传递函数:L[c(t)]G()式中C()L[(t)])s (C G(s)==式中:C(s)=L[c(t)]——输出量的拉氏变换式那么:C(s)=R(s)G(s)[R()G()][C()]()11[R(s)G(s)]L [C(s)]c(t)-1-1==推广到一般情况,系统时域数学模型——推广到般情况,系统时域数学模型微分方程:L L c(t)a a a a 011-n 1-n n n ++++r(t)b d b d d b -++++=L L b ()dt dtdt 011-m 1m m m L L R(s)b sR(s)b R(s)sb R(s)s b 01-1m m +++=a. 控制系统传递函数的一般表达形式:s −L L 传式011n n a s a s a a R(s)+++−b.b.表示成典型环节表达形式:111+++−s T s T s T s s R L )))()(21n υ∏∏i C )(s ωω;==11j l pnpnωωm 系统的稳态增益K =——系统的稳态增益;2m m m+=2n n nν++=c 零极点表达形式K C +++++L c. 表示成零、极点表达形式:)())(()(21m r z s z s z s s =−——νjp 系统的极点,个零极点。
第2章控制系统的数学模型§1 系统数学模型的基本概念一. 系统模型系统的模型包括实物模型、物理模型、和数学模型等等。
物理本质不同的系统,可以有相同的数学模型,从而可以抛开系统的物理属性,用同一方法进行具有普遍意义的分析研究(信息方法)。
从动态性能看,在相同形式的输入作用下,数学模型相同而物理本质不同的系统其输出响应相似。
相似系统是控制理论中进行实验模拟的基础。
二. 系统数学模型1. 系统数学模型系统的数学模型是系统动态特性的数学描述。
数学模型是描述系统输入、输出量以及内部各变量之间关系的数学表达式,它揭示了系统结构及其参数与其性能之间的内在关系。
2. 系统数学模型的分类数学模型又包括静态模型和动态模型。
(1) 静态数学模型静态条件(变量各阶导数为零)下描述变量之间关系的代数方程。
反映系统处于稳态时,系统状态有关属性变量之间关系的数学模型。
(2) 动态数学模型描述变量各阶导数之间关系的微分方程。
描述动态系统瞬态与过渡态特性的模型。
也可定义为描述实际系统各物理量随时间演化的数学表达式。
动态系统的输出信号不仅取决于同时刻的激励信号,而且与它过去的工作状态有关。
微分方程或差分方程常用作动态数学模型。
动态模型在一定的条件下可以转换成静态模型。
在控制理论或控制工程中,一般关心的是系统的动态特性,因此,往往需要采用动态数学模型。
即,一般所指的系统的数学模型是描述系统动态特性的数学表达式。
三. 系统数学模型的形式对于给定的同一动态系统,数学模型的表达不唯一。
如微分方程、传递函数、状态方程、单位脉冲响应函数及频率特性等等。
对于线性系统,它们之间是等价的。
但系统是否线性这一特性,不会随模型形式的不同而改变。
线性与非线性是系统的固有特性,完全由系统的结构与参数确定。
经典控制理论采用的数学模型主要以传递函数为基础。
而现代控制理论采用的数学模型主要以状态空间方程状态空间方程为基础。
而以物理定律及实验规律为依据的微分方程微分方程又是最基本的数学模型,是列写传递函数和状态空间方程的基础。
控制系统的数学模型在控制系统的分析和设计中,首先要建立系统的数学模型。
自动控制系统的组成可以是电气的、机械的、液压的或气动的,然而描述这些系统的数学模型却可以是相同的。
因此,通过数学模型来研究自动控制系统,可以摆脱各种不同类型的外部特征,研究其内在的共性运动规律。
通过本章的学习,我们要掌握三种数学模型:微分方程、传递函数、动态结构图的建立方法。
熟练掌握自动控制系统传递函数的求取方法。
§2—1 列写微分方程的一般方法微分方程是描述控制系统动态性能的一种数学模型。
建立系统或元件微分方程的一般步骤如下:(1) 根据实际工作情况,确定系统和各元件的输入量和输出量; (2) 根据物理或化学定律,列写系统各组成元件的原始方程;(3) 在可能条件下,对各元件的原始方程进行适当简化,略去一些次要因素或进行线性化处理;(4) 消去中间变量,得出描述输出量和输入量(包括干扰)关系的微分方程,即元件的微分方程;(5) 对求出的系统微分方程标准化。
即将与输出有关的各项放在等号左侧;而将与输入有关的各项置于等号右侧,等号左右侧各项均按降幂形式排列。
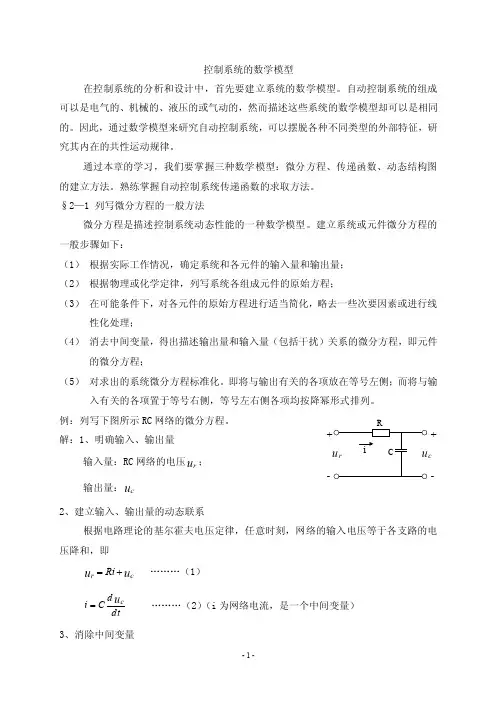
例:列写下图所示RC 网络的微分方程。
解:1、明确输入、输出量输入量:RC 网络的电压u r ;输出量:u c2、建立输入、输出量的动态联系根据电路理论的基尔霍夫电压定律,任意时刻,网络的输入电压等于各支路的电压降和,即u u c r Ri += (1)dtd Ci u c= ………(2)(i 为网络电流,是一个中间变量) 3、消除中间变量-+-R L将(2)式代入(1)式得u u u c cr dtd RC+= 4、系统的微分方程的标准化u u u r c cdtd RC =+ 例2:列写下图所示RLC 网络的微分方程。
(零初始条件) 解:1、明确输入、输出量输入量:u i ; 输出量:u c 2、列写个组件的原始方程⎪⎪⎪⎩⎪⎪⎪⎨⎧==++=)3()2()1( dt d C i dt di L iR u u u u u c Lc L i (i 为网络电流,是一个中间变量) 3、消除中间变量将(3)分别代入(1)、(2)则得⎪⎪⎩⎪⎪⎨⎧=++=)5()4(22 t u d u u u u u d LC dt d RC cL c L c i将(5)代入(4)则得u t u d u u cc c id LC dt d RC++=224、系统的微分方程的标准化u u u tu d i c c cdt d RC d LC =+++22即为所求的微分方程 例3:列写下图所示RL 网络的微分方程。
控制系统的数学模型
控制系统是一种能够自动实现某种规律性动态过程的机电设备,具有广泛的应用和重要的意义。
为了更好地理解和设计控制系统,我们需要学习控制系统的数学模型。
控制系统的数学模型是对系统动态行为的精确描述,通常用微分方程或差分方程来表示。
这个模型是由系统的结构和性质所决定的,因此在设计控制系统时需要考虑到不同方面的因素。
在实际应用中,通常采用系统的状态空间描述法来建立数学模型,其基本形式是:x(t+1) = Ax(t) + Bu(t)
y(t) = Cx(t) + Du(t)
其中,x(t)为系统的状态向量,表示系统各输出量之间的关系;u(t)为输入量向量,表示系统受控的变量;y(t)为输出量向量,表示系统运行时的响应状态;A、B、C、D是系统常数矩阵,分别表示状态转移矩阵、输入特性矩阵、输出矩阵和直流通道矩阵。
这个模型允许我们对控制系统的状态、输入、输出之间的关系进行全面的分析和掌握。
控制系统的数学模型建立好之后,我们需要对其进行仿真和实验验证。
通过模拟相应的输入和输出,可以检验数学模型的可靠性和精度,并找出有误差的地方进行调整和改进。
同时,也能够为控制系统的设计和优化提供有力的指导和参考。
综上所述,控制系统的数学模型是其设计和优化的基础和关键,
建立好数学模型能够更全面地分析和预测系统的运行状态,并为进一
步进行仿真和实验提供必要的基础。
因此,在学习和设计控制系统时,需要注重数学模型的学习和应用,以提高系统的可靠性和实用性。