一种自动折叠抛物面天线结构设计
- 格式:pdf
- 大小:141.34 KB
- 文档页数:3

抛物面天线控制系统组成及软件单元设计探讨一、引言抛物面天线是以发射或接收天线为抛物面为基础的一种天线类型,具有方向性好、收发性能优良等特点,常用于卫星通信、雷达系统、微波通信等领域中。
在现代通信领域中,抛物面天线被广泛应用,因此对其控制系统的设计和软件单元的开发显得尤为重要。
本文将从抛物面天线控制系统的组成和软件单元的设计两个方面进行探讨。
二、抛物面天线控制系统组成设计抛物面天线控制系统是由多个组成部分构成的,包括电机、控制器、驱动器、传感器等。
下面分别对这些部分进行具体分析:1.电机抛物面天线控制系统中电机拥有十分重要的作用,它可以控制天线的方向,将信号源准确地对准天线后进行传输。
传动电机一般采用步进电机或直流电机,其中直流电机又有刷式和无刷式之分,根据具体需求选取合适的电机作为驱动器。
2.控制器抛物面天线控制的核心部分是控制器,控制器可以根据外界传来的指令从而控制电机的转动方向和速度,以达到天线位置的准确控制。
在控制器的选型中,需要考虑控制器的功耗、精度、可靠性等因素。
3.驱动器驱动器是控制器与电机之间的桥梁,其主要作用是将控制器传送的指令转换成电信号,再通过控制电机的状态来实现精准的天线位置控制。
驱动器可以选用恒流型电路、恒压型电路等。
4.传感器控制器通过传感器从外界采集数据,使系统能够及时进行反馈控制。
常见的传感器有光电传感器、超声波传感器、磁电传感器等。
三、抛物面天线软件单元设计软件单元是抛物面天线控制系统中不可或缺的部分,它使系统更加智能化,实现自动控制、数值计算、数据存储与可视化等功能。
下面分别从软件架构、控制算法和用户界面三个方面进行分析:1.软件架构抛物面天线软件的架构一般可以分为三层,即底层硬件驱动层、中间控制层和上层用户界面层。
其中硬件驱动层主要是将硬件与软件进行接口连接;中间控制层主要是负责控制算法的实现与调用;用户界面层负责图形化界面的设计与实现。
2.控制算法抛物面天线控制系统的核心部分是控制算法,控制算法的好坏将直接影响整个系统的性能和稳定性。

第35卷第3期2001年5月浙 江 大 学 学 报 (工学版)Jour nal of Zhejiang Univer sity (Engineering Science)Vol.35№.3May 2001收稿日期:1999-07-05.基金项目:国家自然科学基金资助项目(69982009).作者简介:岳建如(1975-),男,山东临沂人,浙江大学博士,主要从事空间结构、空间可伸展结构的研究.大型可展构架式星载抛物面天线结构设计岳建如,关富玲,陈向阳(浙江大学土木工程学系,浙江杭州310027)摘 要:提出了一个利用伸缩杆驱动的六棱柱展开单元,和国内外已有的设计相比,该单元可动机构数较少,展开可靠度高,结构刚度好,且具有很广泛的几何适应性,能容易地构造复杂二维可展结构,具有广泛的应用前景.利用伸缩杆六棱柱单元,设计了一大型构架式切割抛物面天线,并简要介绍了天线的可展节点细部设计杆件分类统计.该天线的形面精度较高,质量轻,造价低.最后,对天线模型进行了结构分析,说明天线具有良好的刚度.关键词:可展天线;构架式;抛物面天线;六棱柱单元;对角伸缩杆中图分类号:T H122;TU35;V42 文献标识码:A 文章编号:1008-973X(2001)03-0238-06随着人类对宇宙探索的不断深入,超大型、高清晰度的卫星、空间站等航天器成为不可缺少的工具,由于受有效荷载仓的容积限制,世界各国相继发展了大量的大型可展航天结构,但我国对空间可展结构的研究尚处于起步阶段,有待更进一步的深入研究.本文利用拉伸弹簧构造了一个可展伸缩杆六棱柱单元,和国内外类似的可展结构单元相比,该单元在展开后所有展开机构均不需锁定,因而展开可靠度较高,且具有良好的几何适应性.利用该伸缩杆单元,文中设计了一个大型构架式星载抛物面天线,并详细地介绍了设计的各项技术参数,分析了可展天线的展开过程和结构的静力和动力特性,及结构参数的影响.结构分析表明这类构架式可展天线具有展开可靠性高,刚度好,形面精度高和造价低等显著优点.1 结构伸缩杆六棱柱单元结构分析如图1所示为利用弹簧伸缩杆驱动的一个四边形基本单元,周边的四根杆件是不可折叠,也不可收缩的,对角杆设计了弹簧,可以改变杆件长度.折叠状态时,结构成捆状,单元的构件相互平行.由于处于拉伸状态的弹簧收缩,引起结构的逐步展开,到达预定位置后,对角杆受弹簧外套管限制而不能继续收缩,锁定成为几何不变结构.在完全展开状态,结构杆件的尺寸限制了弦杆和竖杆的夹角.要使结构单元能完全折叠,需要满足以下几何相容条件:l 1+l 2=l 3+l 4.(1)单元对角杆在整个展开过程中长度的变化,即弹簧的伸缩量,可表示为$=l 1+l 2-l 21+l 22.(2)单元间的一维连接:当两个四边形单元并列连接形成一维结构时,可以有如图2所示的两种形式,设计平直的一维支架时,可以由一系列首尾相连的对角杆一起驱动结构展开或收纳,如图2(b)所示,此时,有较小的折叠体积.若对角杆平行布置,收纳时,将成一长条形结构,收纳效果不理想.上述一维单元的连接缺乏侧向稳定性,缺少实用价值,设计馈源支架或机械手等一维可展结构时,必须使用三棱柱或四棱柱单元来构造一维支架.正六棱柱单元:如图3为利用弹簧伸缩杆驱动形成的正六棱柱可展开单元,它由如图1所示的四边形基本单元组成.上下表面的12根杆件和6根竖杆及中心杆均是普通铰接构件,不可改变长度,6根斜腹杆是可伸缩的,且相交于一点.边上的细线表示索单元,需要提高结构的刚度时,可以用中间有扭簧可折叠杆件代替索单元.六棱柱单元可以认为由6个四边形单元和一些附加的索单元构成.完全收纳状态时,结构折叠成捆状,杆件紧密相依,由于处于拉伸状态的弹簧的收缩,驱动六棱柱单元展开.但完全收纳时,各杆件处于自平衡状态,需要外加扰动荷载来保证结构的顺利展开.图1 一维自适应结构图 图2 一维连接Fig .1 Th e structur al figure of one dimensional module Fig .2 T he connected figur e of t he modules图3 正六棱柱单元Fig .3 The hexahedr al module图4 模型布置图F ig .4 T he arr angement of the modules 利用图3所示的六棱柱单元可以方便地形成各种二维可展结构,图4所示为一种典型的模型布置俯视图,每根粗线代表一个伸缩杆四边形单元,虚线表示索单元,中心圆表示6根伸缩杆相交的节点.相邻单元采用同一根索.一个六边形虚框内有6根实线相交于一小圆,代表了图3所示的一个六棱柱可展单元.由于节点设计采用柱饺式,保证杆件绕着接头只能在所限定的一个面内转动,单元如图4布置形成结构后,根据体系分析理论,索单元不是维持结构几何不变的必要构件,但它们可以很好的提高结构的刚度.在支承点附近,利用可折叠杆件代替索单元,能得到较合理的结构.利用六棱柱单元形成的结构,具有适应性广的优点,能方便地设计成各种复杂曲面,其中最吸引人的用途是形成大型构架式可展抛物面天线,此时,上表面构成抛物面天线的反射面.空间可展结构要求有高收纳率,能折叠成较小的体积从而可将大型航天器置于有效载荷仓中;质量轻,可降低发射成本;展开可靠度高,尽可能地降低发射风险;实用性广,可用于构造复杂可展结构,并保证所形成结构的形面精度;刚度较高,能避开姿态控制的频率段.机构数:保证较高的展开可靠度,要减少可展结构机构数,特别是完全展开后需要锁定的机构,因为较少的机构意味着较轻的质量,机构的重量往往占整个展开结构质量的很大一部分.六棱柱单元的节点设计保证杆件只能在一个面内转动,因而相邻的四边形单元的弦杆在整个展开过程中一直保持60°角,这样就有效地减少了可动机构数,便于设计,且有效地提高了展开的可靠度.一个六棱柱单元共含6根伸缩杆,没有其它可动机构,完全展开后,不需锁定,因而具有很高的展开可靠度.但设计锁定装置后,能提高结构的刚度和展开重复精度.而索单元(或折叠杆)虽是柔性构件,由于不是必要构件,不影响展开可靠性.文献[1]提出的另一种六棱柱展开单元Hexapod 利用套筒作为可动结构,具有较少的机构数,但设计适应性较差,设计成抛物面时,节点复杂,且套筒滑动容易卡死,将无法二次展开.文献[4]提出的Packtruss 也是一种较有名的六棱柱展开单元,其它可用于构造二维可展结构的非六棱柱单元主要有VLD 和SHDF truss [3],各模型的具体机构数以及与本文所提出的可展单元的比较如表1所示.239 第3期岳建如,等:大型可展构架式星载抛物面天线结构设计表1 各种展开单元比较T ab.1T he contr ast of the deployable modules单 元需锁定机构数不需锁定机构数收纳率Hexapod A 360.0781Packtr uss 1200.0625VLD 1200.0625SHDF 1500.0625本文单元60.0625图5 四边形单元完全收拢示意图Fig.5 F igure of thequadrilat eral module in fully st owed stat e 收纳率是可展结构的一个基本特点,可以定义为结构完全展开体积和完全收纳体积的比值.为简单起见,研究正六棱柱单元的收纳率,并假设单元的所有刚性杆件的管径为d ,六棱柱的边长为l ,展开后,六棱柱单元的高度为h ,完全折叠的六棱柱单元示意图如图5所示,六棱柱的平面投影面积减少约(4.0d /l )2倍,高度则从原来的h 变为l +h ,因而伸缩杆六棱柱单元的收纳率为l 2h(4.0d )2(l +h )=0.0625l 2h d 2(l +h ).(3)这表明,一个口径为20m 的天线,若厚度为50cm,单元杆长67cm,管径15mm ,发射时,能折叠成一直径约180cm ,高117cm 的体积而置于有效荷载仓中.式(3)右端的值越大,说明单元的收纳率越高.从式(3)还能知道,收纳率和杆件管径密切相关,若能采用更细的构件,收纳体积会显著减小.其它几种展开单元的收纳率也可类似求得,各单元收纳率的系数如表1所示,说明各种展开单元的收纳率大体同.设计适应性:这种伸缩杆六棱柱单元虽然机构数很少,但具有很广的适用性,能方便的形成各种复杂结构.一般而言,可动机构数较少,会有较多的几何约束条件,适应性较差,通常形成平面结构不成问题,但难以设计成复杂的结构.因而设计复杂的二维展开结构时,需要认真分析六棱柱单元的几何约束问题.如图3所示,六棱柱单元的可折叠的充分必要条件为l ii +l i 7′=l i 7+l 77′,i =1,2, (6)(4)其中上下表面各点可能要求位于某确定曲面上.若各单元的下表面是由上表面竖直向下平移一定距离而成,则有l i 7=l i ′7′,l ii ′=l 77′,i =1,2, (6)(5)则单元的可折叠条件自然满足,使复杂结构的几何设计非常简单,杆长不需利用几何约束条件迭代求解,没有因为折叠约束条件而引入的数值误差.可展结构的基本单元相互连接形成二维结构时,单元之间往往需要满足一定几何关系,如常见的剪式单元,但本文设计的伸缩杆六棱柱单元,相邻的展开单元之间没有必要的几何约束,因而可以方便地形成复杂的空间折叠结构.2 可展抛物面天线几何分析和节点设计根据上述分析,设计了一个5.0m ×2.88m 的切割抛物面天线,焦距为4.0m,天线设计需要满足的条件有:¹可折叠几何约束条件;º上表面(反射面)位于给定的抛物面上;»保证结构具有一定的刚度;¼较轻的质量;½造价较低廉,尽量使节点和杆件的类型统一.其中前两个条件必须严格满足,后两个条件是设计的优化指标,不一定严格满足,第三个条件主要和结构的厚度及约束条件相关.天线的平面网格划分如图6所示,并由此确定节点的平面坐标,虚线代表索单元.对平面点作抛物面抬升,使其满足条件º,即z j -12f(x 2j +y 2j )=0,(6)式(6)中,f 为抛物面的焦距.背架的下表面可由上表面竖直向下平移求得,即240浙 江 大 学 学 报(工学版) 2001年 z j -12f (x 2j +y 2j )+h =0,(7)式(7)中,h 为上下表面的竖直距离,由结构的刚度要求确定,h 大,则结构刚度较好,但质量会有所增加.所形成的抛物面天线中间厚,四周略薄,是综合考虑条件式(3)、(4)后较合理的结构.天线的杆件长度相互相差不大,能较好地满足质量条件.由于天线保持了较高的对称性,因而杆件的种类较少,所需制造模具数量也少,从而减少了制造成本;节点的造价在整个结构中占了很大比例,本模型的弦杆在整个展开过程之中始终相互保持60°的夹角,因此设计简单,种类较统一,只需两类节点,使天线制造费用较低.在展开和收纳两种状态及展开过程中,相邻弦杆间角度一直保持60°,任何时候各单元的平面投影为六边形,只是投影尺寸有所变化.折叠时,杆件紧密相依.图7是天线完全展开时的透视图,为表示简洁,已略去索单元.图6 抛物面天线的网格划分Fig.6 Th e arr angemen t of the parabolic an tenna图7 抛物面天线透视图Fig.7 T he perspective figu re of the parab o lic antenna 天线的节点设计:展开结构的节点设计关系到可展结构的展开可靠度和展开重复精度,是可展结构设计的重要一环.同时可展结构的节点又和结构自重及造价相关,为降低自重,要求节点尺寸尽可能小,为降低造价,应使节点种类较统一.六棱柱单元的节点连接了6个方向的杆件,且需要保证杆件绕着节点在一个面内转动.天线只采用两类节点,如图8所示,图8(b)为连接有对角杆的节点,图8(a)则未和对角杆相连,两类节点共有97个.上下表面弦杆和竖杆均采用6.4mm(直径)×0.5mm (壁厚)的CFRP 管,对角杆的构造如图9所示,其中粗杆为8.0mm (直径)×0.8mm (壁厚),细杆为6.4mm (直径)×0.5mm (壁厚).表2对天线模型的杆件材料进行了统计.表中,X 表示弦杆,S 表示竖杆,D 表示对角杆,数字表示杆长的分类,其中对角杆的长度为完全展开时的长度,各杆件长度考虑了节点尺寸的影响.从表2中可以看出,虽然抛物面天线的几何很复杂,但按照本文的方法设计的模型杆件种类仍旧很少.表2 杆件种类统计表Tab .2 The table of the kinds of the r ods杆件编号长度/mm 数量杆件编号长度/mm 数量杆件编号长度/m m 数量X1359.3676X7398.5032D5440.222X2361.3164X8419.248D6628.1838X 3374.7560D 1738.8222D 7480.9616X4389.5444D2526.5730D8796.364X5369.0556D3575.9432S 1491.0097X 6430.924D 4682.6428总计-613图8 节点示意图Fig .8 T he figur e of the joints in t he module 图9 对角杆F ig .9 The diagonal member241 第3期岳建如,等:大型可展构架式星载抛物面天线结构设计3 天线模型的结构分析天线上下表面的弦杆、竖杆和节点间采用销钉连接,可以采用普通的铰接杆单元计算.铰接点分别位于节点的6个伸出臂上,实际计算时,将它们等效为一个铰接点.若对角杆未设计锁定装置,其刚度可以近似为弹簧刚度,且根据能量相等的原则将其等代为普通杆单元,等代杆件面积为A =kl E,(8)式(8)中,k 为两根弹簧的串联刚度系数,E 和l 分别为等代杆单元的弹性模量和长度.对角杆若设计了锁定装置,则可以认为由三段不等截面的梁单元组成,如图9所示,根据能量相等的原则,也可以将其等代为一根杆单元,等代杆件面积为A =A 1A 2l2A 2l 1+A 1l 2,(9)图10 模型展开状态模态实验图Fig.10 T he mode exper iment ofpar t of t he ant enna module式(9)中,A 1,A 2分别为粗杆和细杆的截面积,l 1为细杆在锁定装置间的有效长度,l 为等代杆件长度.当天线含索单元时,为使索单元绷紧,必须施加一定预应力,但因为预拉力的值不大,计算时忽略了预应力对结构模态的影响.最中间的四个下弦节点和星体相连,可以近似为简支约束.计算时,忽略了星体运动对结构的影响.为了检验模态计算时建模的正确性,对一部分结构做了模态实验,模型的口径为1.714m.单独测试Z 方向模态,实验结果如下:模型在实验时的收拢和展开照片见图10,前三阶振型图如图11、图12、图13.图11 一阶振型图(f 1=12.58Hz)F ig .11 T he first mode of the str uctur e图12 二阶振型图(f 2=12.58Hz)Fig .12 T he second mode of the structure图13 三阶振型图(f 3=15.29Hz )F ig.13 The third mode of t he str uctur e 模型自振频率测试结果见表3,表4给出了通过有限元分析计算所得的测试模型的前10阶频率,由表3和表4可知,理论上所建立的模型基本上是符合实际的,但是有限元分析时的频率比较集中,由此对上述整个天线进行有限元分析.天线在完全展开状态处于非锁住状态时,预应力索直径为1.0mm ,所有材料采用铝合金,整个结构总体上按桁架计算.结构的前10阶振型表如表5.分析表明,天线具有良好的动力性能,在星体的振动所引起的强迫振动的条件下一般不会发生共振现象.在具体设计时,需要综合考虑卫星各部件的频率,使得结构的整体频率控制在一定范围内,防止共振现象的发生.表3 部分天线结构自振频率表(实验)Ta b.3 T he frequency of the pa rabolic antennaHz 振 型12345678910242浙 江 大 学 学 报(工学版) 2001年 进行有限元分析时所得到的结果:表4 部分天线结构自振频率表(有限元分析)Ta b .4 T he frequency of the pa rabolic antennaHz振 型12345678910频 率12.5812.5815.2925.3325.9725.9730.3530.3531.5234.24表5 整个天线结构自振频率表(有限元分析)Ta b .5 T he frequency of the pa rabolic antennaHz振 型12345678910频 率3.374.947.077.7511.5311.9212.4814.2914.8416.234 结 论(1)本文提出了一个利用伸缩杆驱动的六棱柱展开单元,该单元展开后不需要锁定的机构,因此展开可靠度高,且结构刚度好,具有很广泛的适应性,能容易地构造复杂二维可展结构.(2)利用伸缩杆六棱柱单元,设计了一大型构架式切割抛物面天线,该天线的形面精度较高,质量轻,造价低,满足了可展结构设计的基本要求.对天线模型进行了结构分析,并对部分模型进行了实验分析,结果与理论计算基本吻合.表明天线具有很好的刚度.参考文献:[1] Junjir o Onoda ,Fu Dan -ying ,Kenji Minesugi .T wo -dimensional deployable hexapod truss [J ].J Spacecr aftand Rockets ,1996,33(3):416-421.[2] Hir oshi F ur uya ,Kenichi Higashiyama.Dynamics of closed linked variable geomet ry tr uss manipula tor s[J].Acta Astronaut ica,1995,36(5):251-259.[3] OnodaJ .Two -dimensionally deploya ble tr uss str uct ur es for space applicat ion [J ].J Spacecraft and R ockets ,1988,25(2):109-116.[5] Hedgepeth J M,Miller R K.Str uctur al concepts for large solar concent rat or s[J].Acta Ast ronautica ,1988,17(11):79-89.A large deployable hexapod paraboloid antennaYUE Jian -ru ,GUAN Fu -ling ,CHEN Xiang -yang(Dept .of Civil Engineering ,Zhejiang Uni .,Hangzhou 310027,China )Abstr act :T he space deployable hexapod parabdoid truss antenna presented in this paper is based on the hexahedron module can stow and deploy with the stretching and shortening of the diagonal members .The deployable power is provided by the tension spring in the diagonal rod ,and there is no need for extr a force.Various deployable structures can be for med by connecting more than one hexahedral module together.A most important feature is that there is no mechanism to be locked when the structure is deployed .Its packaging efficiency and stiffness have been shown to be good too .This antenna is designed by using a deployable hexapod truss has light mass and high precision.Structure analysis revealed the high of rigidity the antenna.Key wor ds :deployable antenna;truss structure;par abolic antenna;hexahedral module;diagonal extensible member243 第3期岳建如,等:大型可展构架式星载抛物面天线结构设计。
卫视经纬版电子报/2002年/04月/21日/第008版/自制大口径抛物面天线江西张敏 本人对大口径抛物面天线心仪已久,可惜该类天线价格不菲。
无奈之下,本人遂蒙生自制的念头。
经过深思熟虑,年前动手试制,竟一举成功!高兴之余,现将关键工艺介绍如下,愿与有志之士共享!一、精工制作抛物线模具常常听人告诫:抛物面天线精度高,手工打造的天线,只能当作摆设!为此,本人特别设计如下制作工艺,经实践证明,方法简单,一试即成!抛物面天线直径2.4m,焦距1.2m,抛物线标准方程式:Y2=4.8X取刨花板(2.4m×1.2m)一块,水平放置于地上,在上面精确画出Y2=4.8X的抛物线。
用手锯沿抛物线锯开,即得到一条标准的抛物线截面。
用扁铁沿抛物线截面绷紧并钉牢,这样就获得了一条光滑、坚硬的抛物线截面模具。
将刨花板垂直安置在地面上,并用铅垂线校正,以确保X轴垂直于地平面。
最后,将模具牢牢固定即可(见图1)。
二、制作抛物线天线骨架天线骨架由6个不同直径的钢筋圆圈和6条固定钢筋焊接而成。
钢筋圆圈的制作数据见下表。
用φ14mm的钢筋在弯管机上分别弯制出6、5、4、3、2、1圆圈,并用电焊焊好接头。
将圆圈6水平安放到模具上,用水平仪校正,然后牢牢固定,用同样的方法,将圆5安装到模具上。
然后取两小段钢筋,用电弧焊将圆5和圆6沿抛物线对称焊牢。
圆4、3、2、1和0原点钢板均照此方法安装并焊牢。
最后,用φ2.5mm铁钉从钢板中心孔钉入模具抛物线截面顶点O内。
至此,抛物面天线骨架已焊接成一个整体了,将此骨架顺时针旋转60°,沿着抛物线对称焊入两根固定筋。
照此方法,将6根固定筋全部焊牢,天线骨架制作完毕。
三、安装反射网反射网就地取材,无特殊要求。
本人在一家电焊店购得两张镀锌铁丝网(下脚料),将它们沿对角线剪开,得到4张三角形铁丝网。
将天线骨架从模具上取下来,把4张铁丝网压入骨架并初步整平固定,然后放在模具上,压平压紧,用铁丝固定。
www�ele169�com | 77信息工程0 前言发展航天事业是我国中长期科技发展规划的重要内容,我国正在实施的载人航天、月球探测计划和新型运载火箭等重大航天科技工程都与空间可展开结构有密切的关系[1-2]。
空间可展开结构中最活跃的一个分支就是空间可展开天线。
当前,随着航天事业的不断发展,对天线的要求越来越高,如要求天线具有高精度、高刚度以及大折展比等等[3]。
世界各航天大国均相继发展了大型可折展天线,我国也亟需对空间可折展天线进行深入研究,尤其是空间大型抛物柱面可折展天线。
目前,在卫星系统中应用的天线机构多存在刚度低、展开成形后形面精度低、折展比小等缺点,如可折展固体表面天线具有良好的稳定性但是其形面精度低不及网状可折展天线;充气式折展天线虽然折展比大,但是其形面精度和稳定性均不及网状可折展天线。
鉴于此,创新设计一种可折展网状抛物柱面天线,其可用用于星间通信、星地通信、地球探测、深空探测等领域,具有高精度、高刚度以及大折展比的特点。
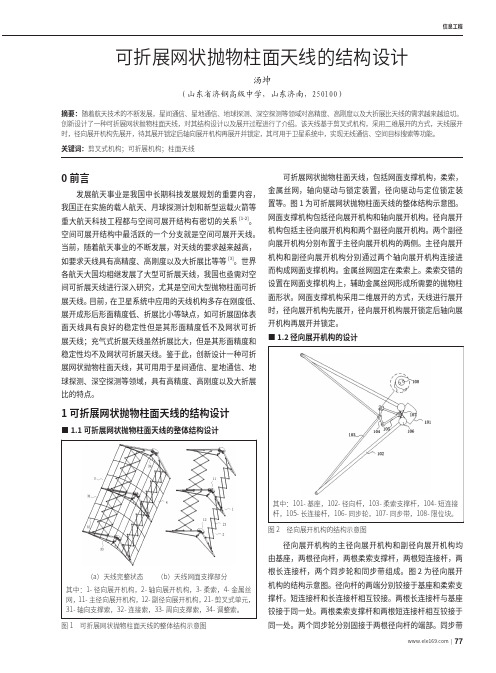
1 可折展网状抛物柱面天线的结构设计■1.1 可折展网状抛物柱面天线的整体结构设计(a)天线完整状态 (b)天线网面支撑部分其中:1-径向展开机构,2-轴向展开机构,3-柔索,4-金属丝网,11-主径向展开机构,12-副径向展开机构,21-剪叉式单元,31-轴向支撑索,32-连接索,33-周向支撑索,34-调整索。
图1 可折展网状抛物柱面天线的整体结构示意图可折展网状抛物柱面天线,包括网面支撑机构,柔索,金属丝网,轴向驱动与锁定装置,径向驱动与定位锁定装置等。
图1为可折展网状抛物柱面天线的整体结构示意图。
网面支撑机构包括径向展开机构和轴向展开机构。
径向展开机构包括主径向展开机构和两个副径向展开机构。
两个副径向展开机构分别布置于主径向展开机构的两侧。
主径向展开机构和副径向展开机构分别通过两个轴向展开机构连接进而构成网面支撑机构。
金属丝网固定在柔索上。
柔索交错的设置在网面支撑机构上,辅助金属丝网形成所需要的抛物柱面形状。

自制WIFI抛物面天线!实现免费蹭网(多图)固定振子的木条,其实只用一个,但是先做两个,多做一个做备用制作振子的材料,从五金商店买来的铜接线头,铜材质导电效果较好,而且长度刚刚好,>3cm,粗的就用不着了,因为要制作2对半波振子的阵列,所以需要四个铜资料说,振子应该粗一点,有利于接收更宽频域的信号,使得信号质量更好、更稳定。
而且更有利于馈线与振子的阻抗匹配,提高天线的工作效率,减轻之后因为2.4GHz信号的波长=125mm,1/4波长=31mm,所以制作振子长度L=31mm做好了4个但是手水平太粗糙了,做成了这么长的,通过自己推断分析,如果做的过长,振子里面就同时存在了正向波与过大比例的负向波,以至于无功分量过大,效率降低,把振子固定在木条上。
本来想用电烙铁接上,但是发现无论用什么办法就是焊不上,可能是因为筒管里面有合金。
所以采用接触式连接,用勒死狗扎紧。
做好了的样子换个姿势,再拍一个现在开始改造无线网卡,这是被改造的网卡,型号是NETGEAR WG511,这是网卡背面。
嘿嘿,有门,正好网卡上有2个备用的天线引出触点,方便我接线,能接得更漂亮。
来个特写我用AV信号线引出信号。
首先因为这个AV信号线够细,方便在网卡内走线,其次是配备了屏蔽线网,电气上统一,虽然这个线材的阻抗跟馈线不一定相同(50欧),但是它尺寸小,只需要很短,差别就被忽略了。
这是背面,接了引线了,双极接2根信号线来个引线特写这是做好了样子制作反射板。
我参考了市面上卖的高增益指向天线和前一阵子网上引起轩然大波的“强搜天线”,又借鉴了卫星电视的信号接受天线,我决定用抛物线形式的反射板,这样有利于信号反射的聚焦。
本来抛物线函数是平滑的,但是考虑到即便我画精确了,也不可能做精确,索性就画成折线。
反射板尺寸设计好了,借鉴了天线托架,具体的就不说了,大家一看照片就一目了然。
由于工艺和材料问题,托架做了改进。
从上面看做个试验,所以简单立外面了接上笔记本速度从2M上升到11M,可见,使信号质量提高了结语:天线尚不完善,工艺制造难度,材料,使用效果等还需要提高。
便携式2米天线的结构设计摘要:本课题着重阐述便携式2米天线结构特点和天线面图绘制的过程。
着重讲述了天线的工作原理和性能指标,介绍了一种结构新颖的便携式天线的设计,天线具有结构灵巧、重量性对同类天线的结构设计具有借鉴作用,并以创新的理念和实用性相结合设计出适应现代化信息的天线。
本设计运用了UG作图软件绘制图形,虽然以前课程没学习UG,但是UG也是一种绘制三维图强大的工具。
运用UG里面的各种操作命令能轻松而且快捷的绘制出你自己设计的各种零件图和装配图形。
它不但能节省设计者的时间,还能准确绘制出你所需要的零件图和装配图。
所以本文就以UG软件绘制天线天线面的结构进行说明和讲解。
关键词:2米天线;图绘制;结构新颖;创新的理念和实用性The Structure Design of a 2m Portable Antenna Abstract:This paper briefly introduces design feature of a 2m Portable Antenna and the process of pareto by parabola.And combining creative idea with practicability design aerial adapting to modernize. UG used the design drawing graphic mapping software, though not before learning courses UG, but UG is also a three-dimensional graph drawing powerful tool. UG which use a variety of command can easily and quickly map out the design your own map of various parts and assembly graphics. It will not only save time for designers, but also to map out the exact parts you need maps and assembly drawings. Therefore, this article on UG software to draw the structure of the antenna to the antenna face and explain .Key words:2m antenna; pareto; structure design目录第一章绪论 (1)1.1 课题的背景介绍……………..…………………………………… .11.2天线结构形式介绍 (2)1.3本课题主要研究内容 (3)1.4课题的意义与创新 (3)第二章总体方案设计 (3)2.1便携式2m天线的结构性能指标 (3)2.2 2m天线系统用途及设计总体要求 (4)2.3总体结构型式确立 (4)2.3.1便携式天线面的结构设计 (5)2.3.2天线座结构设计 (6)2.4天线面结构设计的方案比较与确定 (6)2.4.1方案比较 (6)2.4.2选择和评价 (6)第三章详细设计 (6)3.1设计软件介绍 (7)3.2设计思路 (7)3.3设计原则 (7)3.4零件的设计与部分零件的装配 (7)3.4.1中心盘零件的设计 (7)a底板和圆管零件的设计和装配 (8)b支耳零件的设计和装配 (9)c夹块零件的设计和装配 (11)d 中心柱零件的设计和装配 (12)e螺钉零件的设计 (13)f馈源支杆零件的设计和装配 (14)I天线面板零件的设计和装配 (15)3.5天线面的总体装配设计 (17)3.6天线面的总体二维装配设计 (22)第四章结语 (23)谢辞 (23)参考文献 (24)附录 (25)第一章绪论1.1 课题的背景介绍本天线主要应用于青藏高原。
一种折叠反射面天线的结构设计李阳;王宏杰【摘要】In view of the problem that the structural dimensions of the reflector antennas of the maneuvering radars go beyond the transport limitations,an automatically unfolded/folded reflector antenna is designed through adopting the 3D modeling and virtual assembly technologies to optimize its structure based on the load analysis results.The antenna meets the maneuvering requirements that it can be unfolded and folded respectively for the operation and the transportation.%针对机动雷达反射面天线结构尺寸运输超限问题,介绍了在结构设计过程中依据载荷分析计算结果,应用三维建模技术,虚拟装配技术,优化结构布局,完成自动展开/折叠反射面天线的结构设计。
该天线在工作状态展开,在运输状态收缩到规定运输界限范围内,满足了雷达机动要求。
【期刊名称】《雷达与对抗》【年(卷),期】2012(032)004【总页数】3页(P56-58)【关键词】机动雷达;展开;折叠天线;结构设计【作者】李阳;王宏杰【作者单位】海军装备部驻上海地区军事代表局,上海200083;中国船舶重工集团公司第七二四研究所,南京210003【正文语种】中文【中图分类】TN957.80 引言高机动技术是地面雷达的一个重要发展方向。
机动雷达必须适应各种野外阵地,在运输状态收缩在规定运输界限范围以内,满足机动需要;在工作状态展开或适当举高,既可以避开地物遮挡,又可以改善雷达探测性能[1]。