7.3 力法的基本体系选择及典型方程
- 格式:ppt
- 大小:465.50 KB
- 文档页数:12

力法的基本方程
基本体系转化为原来超静定结构的条件是:基本体系沿多余未知力X1方向的位移D1应与原结构位移ΔB相同,即
Δ1 = ΔB = 0
这个转化条件是一个变形条件或称位移条件,也就是计算多余未知力时所需要的补充条件。
Δ1 = ΔB = 0 (1-1)
应用迭加原理把条件(1-1)写成显含多余未知力X i的展开形式。
Δ1=Δ1P+Δ11=0 (1-2)
Δ1为基本体系在荷载与未知力X1共同作用下沿X1方向的总位移;
Δ1P为基本结构在荷载单独作用下沿X1方向的位移;
Δ11为基本结构在未知力X1单独作用下沿X1方向的位移。
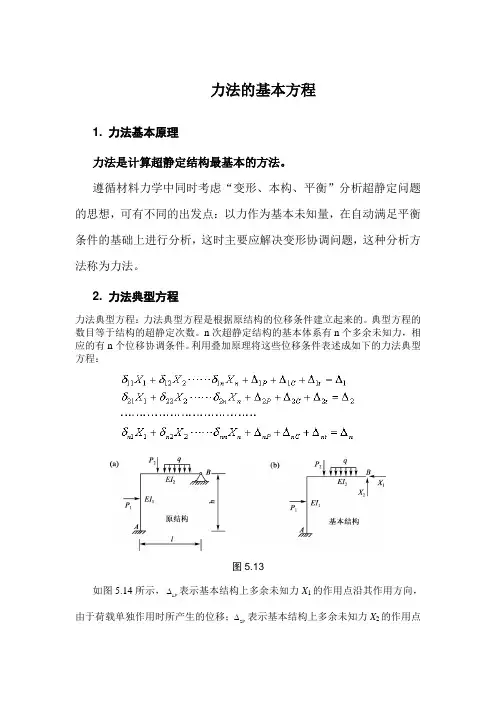
(相关字母含义如图所示)
位移Δ1、Δ1P和Δ11的符号都以沿假定的X1方向为正。
若以d11表示基本结构在单位力X1=1单独作用下沿X1方向产生的位移,则有
Δ11=d11X1 (1-3 )
于是,上述位移条件(1-2)可写为
δ11X1+Δ1P = 0 (1-4)
此方程便称为一次超静定结构的力法的基本方程。
力法的基本结构力法是一种用于分析和解决力学问题的基本方法。
它是基于牛顿第二定律,即力等于质量乘以加速度的原理。
力法的基本结构包括问题描述、选择坐标系、分析物体受力情况、建立方程、求解方程和检验答案等步骤。
问题描述是力法解题的起点。
在问题描述中,我们需要明确所讨论的物体、系统和力的性质。
例如,一个常见的问题描述是:一个质量为m的物体在斜面上以一定的角度和初速度滑动,求解物体在斜面上的加速度和滑动距离。
选择坐标系是力法解题中的重要步骤。
通过选择合适的坐标系,可以简化问题的分析过程。
在选择坐标系时,我们需要考虑物体受力情况的特点和问题的要求。
例如,在斜面滑动问题中,我们可以选择斜面为x轴,垂直斜面向上的方向为y轴。
接下来,分析物体受力情况是力法解题的关键步骤。
我们需要考虑物体所受的外力和内力,并将其分解为各个分力的合力。
在斜面滑动问题中,物体受到重力和斜面对物体的支持力,我们可以将重力分解为沿斜面方向和垂直斜面方向的分力。
然后,建立方程是力法解题的核心步骤。
通过应用牛顿第二定律,我们可以建立物体所受合力与物体的加速度之间的关系。
在斜面滑动问题中,我们可以将物体在斜面方向上的合力与物体的加速度建立关系式。
求解方程是力法解题的关键步骤。
通过对建立的方程进行求解,我们可以得到物体的加速度等需要求解的物理量。
在斜面滑动问题中,我们可以通过求解方程得到物体在斜面上的加速度。
检验答案是力法解题的重要步骤。
我们需要将所求解的物理量代入原始问题中,验证答案的合理性。
在斜面滑动问题中,我们可以将求得的加速度代入原始问题中,计算物体的滑动距离,以验证所得答案的正确性。
力法的基本结构包括问题描述、选择坐标系、分析物体受力情况、建立方程、求解方程和检验答案等步骤。
通过应用力法,我们可以解决各种力学问题,揭示物体受力和运动规律之间的关系。
力法的应用不仅在物理学中具有重要意义,也在工程学和其他相关领域中发挥着重要作用。
因此,掌握力法的基本结构和应用方法是我们学习和应用力学知识的关键。
1第六章力法2一. 力法的基本未知量和基本体系力法计算的基本思路:把超静定结构的计算问题转化为静定结构的计算问题,即利用已经熟悉的静定结构的计算方法来达到计算超静定结构的目的。
6-1 力法的基本原理3力法思路基本结构待解的未知问题qEI EIqEIX 1基本体系基本未知量01=Δ基本方程41111=+=P ΔΔΔ11111X Δδ=01111=+⋅P ΔX δ力法方程力法方程P 1Δ其中δ11和Δ1P可图乘法获得;由此确定约束力X 1,通过叠加求内力;超静定问题变成静定问题。
q1X Δ11=X 11δqEIqEIX 11=Δ5)力法是将多余未知力作为基本未知量的分析方法。
)将全部多余约束去掉得到的静定结构称力法的基本结构。
)根据原结构的变形条件而建立的位移方程称力法基本方程。
在变形条件成立条件下,基本体系的内力和位移与原结构相同。
1111=+⋅P ΔX δ6基本结构X 1例:基本体系PV ΔB 1==原结构已知的X 1方向的位移原结构70V ΔB 1==基本结构在X 1和外荷载P 分别作用下的变形:X 111ΔPP1Δ原结构已知的X 1方向的位移基本结构在X 1方向的位移1P 11Δ+Δ1P 11Δ+Δ0=11111X Δδ=11=X 11δ01111=Δ+P X δ力法基本方程的物理意义:基本结构在X 1和外荷载P 共同作用下,在B 点的竖向位移之和=原结构已知的在B 点的竖向位移(等于零)。
8一个超静定结构可选的力法基本结构往往不只一种。
X 1表示原结构支座B 截面的弯矩。
基本体系二基本体系二选取:原结构PPX 1基本结构Δ1=原结构在B 点左右两截面的相对转角等于零9基本结构:PX 11PΔ11ΔB11111X δ=Δ0ΔX δ=+1P 111基本体系在X 1 和外荷载P 共同作用下,在B 点左右两截面的相对转角之和=原结构已知的在B 点左右两截面的相对转角(等于零)1P11Δ+Δ0=10(1)(2)(1)基本结构的图和图好绘。

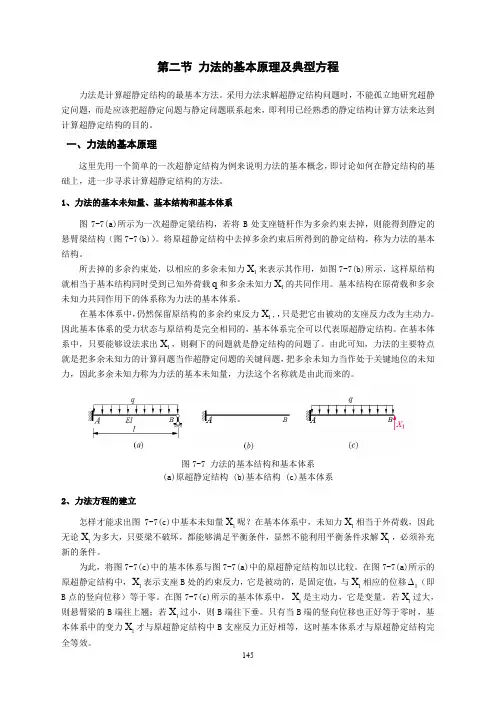
第二节 力法的基本原理及典型方程力法是计算超静定结构的最基本方法。
采用力法求解超静定结构问题时,不能孤立地研究超静定问题,而是应该把超静定问题与静定问题联系起来,即利用已经熟悉的静定结构计算方法来达到计算超静定结构的目的。
一、力法的基本原理这里先用一个简单的一次超静定结构为例来说明力法的基本概念,即讨论如何在静定结构的基础上,进一步寻求计算超静定结构的方法。
1、力法的基本未知量、基本结构和基本体系图7-7(a)所示为一次超静定梁结构,若将B 处支座链杆作为多余约束去掉,则能得到静定的悬臂梁结构(图7-7(b))。
将原超静定结构中去掉多余约束后所得到的静定结构,称为力法的基本结构。
所去掉的多余约束处,以相应的多余未知力1X 来表示其作用,如图7-7(b)所示,这样原结构就相当于基本结构同时受到已知外荷载q 和多余未知力1X 的共同作用。
基本结构在原荷载和多余未知力共同作用下的体系称为力法的基本体系。
在基本体系中,仍然保留原结构的多余约束反力1X ,,只是把它由被动的支座反力改为主动力。
因此基本体系的受力状态与原结构是完全相同的,基本体系完全可以代表原超静定结构。
在基本体系中,只要能够设法求出1X ,则剩下的问题就是静定结构的问题了。
由此可知,力法的主要特点就是把多余未知力的计算问题当作超静定问题的关键问题,把多余未知力当作处于关键地位的未知力,因此多余未知力称为力法的基本未知量,力法这个名称就是由此而来的。
图7-7 力法的基本结构和基本体系(a)原超静定结构 (b)基本结构 (c)基本体系2、力法方程的建立怎样才能求出图7-7(c)中基本未知量1X 呢?在基本体系中,未知力1X 相当于外荷载,因此无论1X 为多大,只要梁不破坏,都能够满足平衡条件,显然不能利用平衡条件求解1X ,必须补充新的条件。
为此,将图7-7(c)中的基本体系与图7-7(a)中的原超静定结构加以比较。
在图7-7(a)所示的原超静定结构中,1X 表示支座B 处的约束反力,它是被动的,是固定值,与1X 相应的位移1 (即B 点的竖向位移)等于零。
力法典型方程力法典型方程是物理学中经常用到的方程,它描述了物体受力和相应运动的关系,是力学基本原理的具体应用。
下面介绍几个力法典型方程的例子:1. 牛顿第二定律:F = ma这是力学中最基本的方程之一。
它表明,物体的加速度与物体所受的合外力成正比,质量越大,加速度越小;质量越小,加速度越大。
这个方程揭示了物体运动的原因是受到力的作用。
2. 万有引力定律:F = G * (m?m?) / r2这是描述物体间引力作用的方程,其中F表示物体之间的引力,m?和m?分别是两个物体的质量,r是它们之间的距离,G是一个常数,称为万有引力常数。
这个方程告诉我们,两个物体之间的引力与它们的质量成正比,与它们之间的距离的平方成反比。
3. 功率方程:P = F * v这个方程描述了力的功率和物体的速度之间的关系。
功率表示单位时间内所做的功,F是作用在物体上的力,v是物体的速度。
这个方程告诉我们,功率与力和速度成正比,当力和速度增大时,功率也相应增大。
4. 胡克定律:F = k * x这个方程用于描述弹簧的伸缩过程中的力和位移之间的关系。
其中F 表示弹簧受到的恢复力,k是弹簧的弹性系数,x是弹簧的位移。
这个方程告诉我们,弹簧的恢复力与它的位移成正比。
5. 速度-时间关系方程:v = u + at这个方程描述了物体的速度和时间之间的关系,其中v是物体的最终速度,u是初始速度,a是物体的加速度,t是经过的时间。
这个方程告诉我们,物体的速度随时间的增加而改变,其改变率与加速度成正比。
这些力法典型方程是物理学中最常用的方程之一,它们可以帮助我们理解物体受力和相应运动的规律。
通过应用这些方程,我们可以计算物体的加速度、速度、力、功率等物理量,并预测物体的运动轨迹和相互作用。
在实际问题中,我们可以根据具体情况选用适当的力法典型方程来求解。
通过运用这些方程,我们能够更好地理解和解释物体的运动规律,为科学研究和工程实践提供重要的理论基础。
力法计算的基本体系
力法计算是一种基于力学原理对建筑结构进行分析和设计的方法。
它主要包含以下几个基本体系:
1.荷载体系:包括作用于建筑结构上的各种荷载,如自重、建筑物使用荷载、风荷载、地震荷载等。
2.结构体系:指建筑结构的整体构造方式,包括框架结构、悬挂结构、梁柱结构、拱壳结构等。
3.材料体系:包括建筑结构所使用的各种材料,如混凝土、钢材、木材等。
4.构件体系:指构成建筑结构的各种构件,如梁、柱、墙、板等。
5.计算方法:力法计算采用静力学和动力学原理,通过对荷载、结构、材料、构件的分析,确定结构内力和变形,以评估建筑结构的可靠性和安全性。
6.设计规范:力法计算还需要遵循相关的设计规范,如国家标准、行业标准、地方规范等,以确保设计方案符合国家和地方的安全标准和规范要求。
综上所述,力法计算的基本体系包括荷载体系、结构体系、材料体系、构件体系、计算方法和设计规范。
这些体系的完整、合理应用可以提高建筑结构的安全性和可靠性,确保其满足设计要求并获得有效的工程效果。