条件平差原理
- 格式:doc
- 大小:279.50 KB
- 文档页数:4
条件平差公式
条件平差公式是一种用于对多个测量值进行分析和校正的数学方法。
其基本原理是,将所有测量值组成一个方程组,其中每个方程表示一个测量量与其他测量量之间的关系。
通过求解这个方程组,可以得到每个测量值的最优估计值和方差。
具体地说,条件平差公式可以分为两类:一类是基于观测方程的条件平差公式,另一类是基于误差方程的条件平差公式。
观测方程的条件平差公式是指,将所有测量值表示为观测方程的形式,然后通过最小二乘法求解得到最优估计值和方差。
观测方程通常表示为线性方程组的形式,即y=AX+e,其中y表示观测值,A表示系数矩阵,X表示未知数向量,e表示误差向量。
误差方程的条件平差公式是指,将所有误差表示为误差方程的形式,然后通过最小二乘法求解得到最优估计值和方差。
误差方程通常表示为非线性方程组的形式,即f(X)=e,其中f表示误差函数,X表示未知数向量,e表示误差向量。
无论是基于观测方程还是基于误差方程的条件平差公式,都具有很强的实用性和广泛的应用范围。
它们可以用于地理测量、航空测量、工程测量等领域,对于提高测量精度和减小误差具有重要意义。
- 1 -。

平差原理和方法的使用与分析一、引言平差作为一种测量数据处理的方法,广泛应用于测绘、空间定位、工程测量等领域。
平差的目的是通过处理观测数据,获得更为准确的测量结果。
在实际应用中,平差原理和方法的正确使用与分析将直接影响测量成果的质量。
二、平差原理的理解与应用平差的基本原理是通过最小二乘法,将观测数据的误差最小化。
在平差过程中,需要定义观测量、未知量和条件方程。
观测量是指通过测量得到的待确定的量,未知量是指需要求解的量,而条件方程则是将观测数据与未知量联系起来的等式。
在实际应用中,我们常用的平差方法有最小二乘平差、加权最小二乘平差和限差平差等。
最小二乘平差是指通过最小化观测数据的加权残差平方和,来获得最优的未知量组合。
加权最小二乘平差则是在最小二乘平差的基础上,考虑观测数据的精度权重,以提高平差结果的准确性。
限差平差是将观测数据的精度限制在一定范围内,以排除异常值的影响。
三、平差方法的适用性分析在选择平差方法时,我们需要根据实际情况进行适用性分析。
首先,应考虑观测数据的误差特点,如观测数据是否服从正态分布、是否存在系统误差等。
对于服从正态分布的数据,最小二乘平差是一种较为合适的方法。
对于存在系统误差的数据,可以考虑加权最小二乘平差来降低系统误差对结果的影响。
其次,应考虑观测数据的精度要求,以及所求未知量的敏感度。
如果精度要求较高或者所求未知量对结果较为敏感,可以采用限差平差来排除异常值的影响。
四、平差方法的误差分析在平差过程中,误差分析是至关重要的。
常见的误差包括观测误差、建模误差和未知量的估计误差。
观测误差是指测量仪器、环境等因素引起的误差,可以通过观测数据的重复测量来进行估计。
建模误差则是由于条件方程的建立不完善或者模型假设不准确而导致的误差。
未知量的估计误差是未知量的真值与估计值之间的差异。
误差分析的结果可用于判断平差结果的可靠性。
如果误差分析结果较小,说明平差结果较为可靠;如果误差分析结果较大,则需要重新考虑观测数据的准确性和建模的合理性。

§3-2 高程网条件平差0.5学时高程网包括水准网和三角高程网。
对高程网进行条件平差时,一般以已知高程点的高程值作为起算数据,以各测段的观测高差值作为独立观测值,写出其满足的条件关系式,按照条件平差的原理解算各高差值的改正数和平差值,然后再计算出各待求点的高程平差值,并进行精度评定。
一、高程网条件方程的个数及条件方程式进行条件平差时,首先要确定条件方程的个数。
从上节内容可知道,在一般情况下,条件方程式的个数与多余观测的个数r相符。
而要确定多余观测个数就必须先确定必要观测个数t。
高程测量(包括三角高程测量和水准测量)的主要目的是确定未知点的高程值。
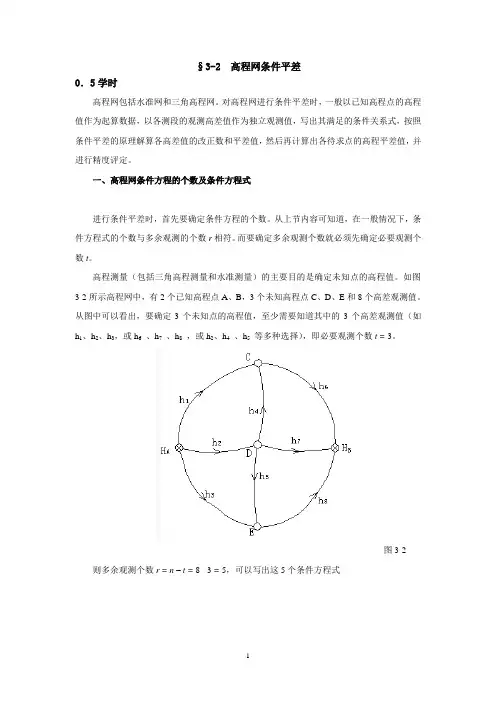
如图3-2所示高程网中,有2个已知高程点A、B,3个未知高程点C、D、E和8个高差观测值。
从图中可以看出,要确定3个未知点的高程值,至少需要知道其中的3个高差观测值(如h1、h2、h3,或h6、h7、h8,或h2、h4、h5等多种选择),即必要观测个数t = 3。
图3-2 则多余观测个数r = n – t = 8 - 3 = 5,可以写出这5个条件方程式⎪⎪⎪⎭⎪⎪⎪⎬⎫=-++=+-=-+=+-=--0ˆˆ0ˆˆ ˆ0ˆˆˆ0 ˆˆˆ 0ˆˆˆ72875764532421B A H H h h h h h h h h h h h h h h相对应的改正数条件方程式形式⎪⎪⎪⎭⎪⎪⎪⎬⎫=-+=-+-=--+=-+-=--+00 0005724875376425321421w v v w v v v w v v v w v v v w v v v其中⎪⎪⎪⎭⎪⎪⎪⎬⎫-++-=+--=-+-=+--=---=)()()()()(7258754764353224211B A H H h h w h h h w h h h w h h h w h h h w这些条件方程式(或改正数条件方程式),大体上分为两类:其一是闭合路线情况,如条件方程式中前四个条件方程式,可称为闭合条件方程式;其二是附合路线情况,如条件方程式中第五个,反应的是从A 点出发后测得的B 点的高程值是否与B 点的已知高程值相等的问题,可称为附合条件方程式。
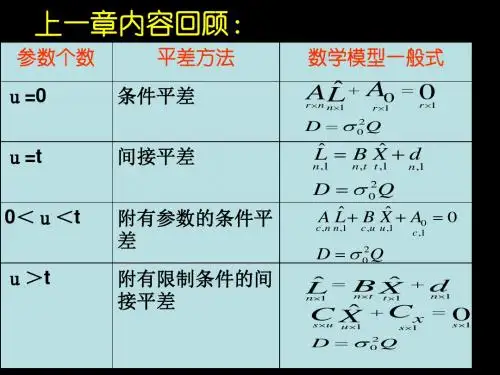

§9.1 条件平差原理
在条件观测平差中,以n 个观测值的平差值1
ˆ⨯n L 作为未知数,列出v 个未知数的条件式,
在min =PV V T 情况下,用条件极值的方法求出一组v 值,进而求出平差值。
9.1.1基础方程和它的解
设某平差问题,有n 个带有相互独立的正态随机误差的观测值 ,其相应的权阵
为 , 它是对角阵,改正数为 ,平差值为 。
当有r 个多余观测时,则平差值 应
满足r 个平差值条件方程为:
⎪⎪
⎭
⎪⎪⎬⎫=++++=++++=++++0ˆˆˆ0ˆˆˆ0
ˆˆˆ221122112211οο
οr L r L r L r b L b L b L b a L a L a L a n n n n n n (9-1) 式中i a 、i b 、…i r (i =1、2、…n )——为条件方程的系数;
0a 、0b 、…0r ——为条件方程的常项数
以i
i i v L L +=ˆ(i =1、2、…n )代入(9-1)得条件方程
(9-2)
式中a w 、b w 、……r w 为条件方程的闭合差,或称为条件方程的不符值,即
(9-3) 令
⎪⎪
⎪
⎪⎪
⎭
⎫
⎝⎛=⨯n n n n r r r r b b b a a a A
21
2121
⎪⎪
⎭
⎪⎪⎬⎫++⋅⋅⋅++=++⋅⋅⋅++=++++=022110221102211r L r L r L r w b L b L b L b w a L a L a L a w n n n n n b n n a ⎪⎪
⎭⎪
⎪⎬
⎫
=++⋅⋅⋅++=++⋅⋅⋅++=++⋅⋅⋅++000221122112211r n n b n n a n n w v r v r v r w v b v b v b w v a v a v a ⎪⎪⎪⎪⎪⎭
⎫ ⎝⎛
=⨯n n L L L L 211
⎪⎪⎪⎪⎪⎭
⎫ ⎝⎛
=⨯n n L L L L ˆˆˆˆ2
11
1⨯n L n
n P ⨯1
⨯n V 1
ˆ⨯n L 1
ˆ⨯n L
则(9-1)及(9-2)上两式的矩阵表达式为
0ˆ0
=+A L
A (9-4) 0=+W AV (9-5)
上改正数条件方程式中V 的解不是唯一的解,根据最小二乘原理,在V 的无穷多组解中,取PV V T = 最小的一组解是唯一的,V 的这一组解,可用拉格朗日乘数法解出。
为此,设 ,K 称为联系数向量,它的唯数与条件方程个数相等,按拉格朗日乘数法解条件极值问题时,要组成新的函数:
)(2W AV K PV V T T +-=Φ 将Φ对V 求一阶导数,并令其为零得:
A K P V T T =
K A PV T =
K A V V T 1-= (9-6)
上式称为改正数方程,其纯量形式为
)(1
r i b i a i i i k r k b k a p v +++= (i =1、2、…n ) (9-7)
代 K A P V T 1-=入0=+W AV 得
01=+-W K A AP T
0=+W NK (9-8)
上式称为联系数法方程,简称法方程。
式中N 法方程系数距阵,为
⎥⎥⎥⎥⎥⎥⎥
⎥
⎥⎦
⎤⎢⎢⎢
⎢⎢⎢⎢
⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡⎥⎦
⎤⎢⎣⎡⎥⎦
⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡⎥
⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡⎥⎦⎤
⎢⎣⎡⎥⎦⎤⎢⎣⎡=P rr P br P ar P br P bb P ab P ar P ab p aa N
(9-9) 因N A AP A P A A AP N T T T T T T T ====---111)()( 故,N 是r 阶的对称方阵。
⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⨯r b a r w w w W 1⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⨯n n v v v V 211⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⨯οοοr b a A o r 1
r n T
n n n r r
r A P A N ⨯⨯-⨯⨯=1()r b a r
T k k k K =⨯1A
K P V V T T 22-=∂Φ∂⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⨯n n n p p p P 00000021
法方程的纯量形式为
⎪⎪⎪
⎪
⎪
⎭
⎪⎪
⎪
⎪
⎪⎬⎫=+⎥⎦⎤⎢⎣⎡+⋅⋅⋅+⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=+⎥⎦
⎤⎢⎣⎡++⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=+⎥⎦⎤
⎢⎣⎡++⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡000r r b a b r b a a r b a w k p rr k p br k p ar w k p br k p bb k p ab w k p ar k p ab k p aa (9-10) 从法方程解出联系数K 后,将K 值代入改正数方程,求出改正数V 值,再求平差值
V L L +=ˆ,这样就完成了按条件平差求平差值的工作。
9.1.2 精度评定
当各被观测量的平差值求出后,下一步就是对观测精度及平差值或平差值函数的精度进行评定,下面来讨论这个问题。
1.单位权中误差
条件平差中单位权中误差
t
n PV
V T -±=0ˆσ
(9-11)
或 (9-12)
从中误差计算公式可知,为了计算0ˆσ
,关键是计算PV V T ()Pvv 。
下面将讨论PV V T ()Pvv 的计算方法。
(1)、由i V 直接计算
[]2222211n n v P v P v P Pvv +++= (9-13)
(2)、由联系数K 及常数项W 计算 因 0=+W AV
K A P V T 1-= 故()K A PP V K A P P V PV V T T T T T 11--==
K A V T T =
()K W K AV T T
-== (9-14) (3)、直接在高斯——杜力特表格中解算
将(9-4)的矩阵方程写为纯量形式则有
r r b b a a T k W k W k W PV V ++++=- 0
令 0=w W
[]
r
Pvv ±=0ˆσ
r r b b k W k W ++
]()[]()()[]1111-⋅⎥
⎦
⎤⎢⎣⎡-⋅-⋅--⋅r W r p
rr r W W r
r b
[])()(0w w r W w ⨯+=⋅= (9-15)
(2)平差值函数的权倒数
设有平差值函数为()
n
L L L f ˆ,,ˆ,ˆ21 =ϕ (9-16)
它的权函数式为:
n
n L d f L d f L d f ˆˆˆ2211+++= (9-17)
令()n T f f f f ,,21= ()
T n
L d L d L d L d ˆ,ˆ,ˆˆ21 = 则
L
d f d T ˆ=ϕ (9-18)
(9-19)
这就是高斯约化表中 的计算公式,其规律与[]r W w ⋅计算规律完全相同。
n
n L d L L d L L d L d ˆ)ˆ(ˆ)ˆ(ˆ)ˆ(2211∂∂++∂∂+∂∂=ϕϕϕϕ ⎥⎦
⎤⎢⎣
⎡⋅=r P ff ()()()⎥⎦⎤⎢⎣⎡-⋅⎥⎦
⎤⎢⎣⎡-⋅⎥⎦⎤
⎢⎣⎡-⋅--⎥⎦⎤⎢⎣⎡⋅⎥⎦
⎤⎢⎣⎡⋅⎥⎦⎤
⎢⎣⎡⋅-⎥⎦⎤⎢⎣⎡⎥
⎦⎤⎢⎣⎡⎥⎦⎤
⎢⎣⎡-
⎥⎦⎤⎢⎣⎡=1111111r P rf r P rr r P rf P bf P bb P bf P af P aa P af P ff P ϕϕ
P 1。