相关观测值条件平差
- 格式:pdf
- 大小:363.54 KB
- 文档页数:8
测量平差概要一、基本概念01、极条件的个数等于中点多边形、大地四边形和扇形的总数。
02、在间接平差中,独立未知量的个数等于必要观测数。
03、协方差与权互为倒数。
04、在测量中产生误差是不可避免的,即误差存在于整个观测过程,称为误差公理。
05、在间接平差中,误差方程的个数等于观测值的个数。
06、协因数阵与权阵互为逆阵。
07、偶然误差的四个统计特性是:有界性、聚中性、对称性和抵偿性。
08、圆周条件的个数等于中点多边形的个数。
09、偶然误差服从正态分布。
10、只有包含中点多边形的三角网才会产生圆周角条件。
11、条件平差的法方程个数等于多余观测个数,间接平差的法方程的个数等于必要观测数。
12、描述偶然误差分布常用的三种方法是:列表法、绘图法、密度函数法。
13、同一个量多次不等精度观测值的最或是值等于其加权平均值。
14、应用权倒数传播律时观测值间应误差独立。
15、极限误差是指测量过程中规定的最大允许误差值,通常取测量中误差的3倍作为极限误差。
16、在平地,水准测量的高差中误差与水准路线长度的算术平方根成正比。
17、在水准测量中要求前后视距相等是为了消除i角产生的系统误差。
18、在测角中正倒镜观测是为了消除系统误差。
19、水准网的必要起算数据为1个,独立测角网的必要起算数据为4个。
20、在水准测量中估读尾数不准确产生的误差是偶然误差。
21、独立测角网的条件方程有图形条件、圆周条件和极条件三种类型。
22、定权时单位权中误差可任意给定,它仅起比例常数的作用。
23、测角精度与角度的大小无关。
24、观测值的权通常是没有量纲的。
25、在山地,水准测量的高差中误差与测站数的算术平方根成正比。
26、测角网的必要观测个数等于待定点个数的2倍。
27、仪器误差、观测者和外界环境的综合影响称为观测条件28、独立水准网的条件方程式只有闭合水准路线。
29、根据误差对观测结果的影响,观测误差可分为系统误差和偶然误差两类。
30、观测值的协因数与方差成正比,观测值的权与方差反比。
测量平差概要一、基本概念01、极条件的个数等于中点多边形、大地四边形和扇形的总数。
02、在间接平差中,独立未知量的个数等于必要观测数。
03、协方差与权互为倒数。
04、在测量中产生误差是不可避免的,即误差存在于整个观测过程,称为误差公理。
05、在间接平差中,误差方程的个数等于观测值的个数。
06、协因数阵与权阵互为逆阵。
07、偶然误差的四个统计特性是:有界性、聚中性、对称性和抵偿性。
08、圆周条件的个数等于中点多边形的个数。
09、偶然误差服从正态分布。
10、只有包含中点多边形的三角网才会产生圆周角条件。
11、条件平差的法方程个数等于多余观测个数,间接平差的法方程的个数等于必要观测数。
12、描述偶然误差分布常用的三种方法是:列表法、绘图法、密度函数法。
13、同一个量多次不等精度观测值的最或是值等于其加权平均值。
14、应用权倒数传播律时观测值间应误差独立。
15、极限误差是指测量过程中规定的最大允许误差值,通常取测量中误差的3倍作为极限误差。
16、在平地,水准测量的高差中误差与水准路线长度的算术平方根成正比。
17、在水准测量中要求前后视距相等是为了消除i角产生的系统误差。
18、在测角中正倒镜观测是为了消除系统误差。
19、水准网的必要起算数据为1个,独立测角网的必要起算数据为4个。
20、在水准测量中估读尾数不准确产生的误差是偶然误差。
21、独立测角网的条件方程有图形条件、圆周条件和极条件三种类型。
22、定权时单位权中误差可任意给定,它仅起比例常数的作用。
23、测角精度与角度的大小无关。
24、观测值的权通常是没有量纲的。
25、在山地,水准测量的高差中误差与测站数的算术平方根成正比。
26、测角网的必要观测个数等于待定点个数的2倍。
27、仪器误差、观测者和外界环境的综合影响称为观测条件28、独立水准网的条件方程式只有闭合水准路线。
29、根据误差对观测结果的影响,观测误差可分为系统误差和偶然误差两类。
30、观测值的协因数与方差成正比,观测值的权与方差反比。
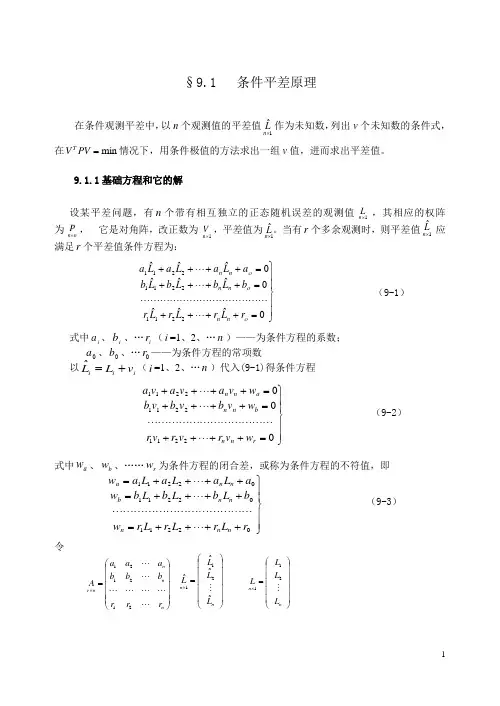
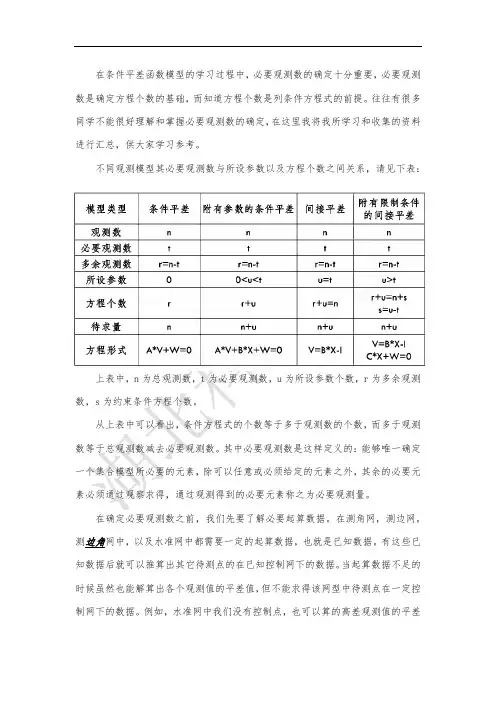
§9.1 条件平差原理在条件观测平差中,以n 个观测值的平差值1ˆ⨯n L 作为未知数,列出v 个未知数的条件式,在min =PV V T 情况下,用条件极值的方法求出一组v 值,进而求出平差值。
9.1.1基础方程和它的解设某平差问题,有n 个带有相互独立的正态随机误差的观测值 ,其相应的权阵为 , 它是对角阵,改正数为 ,平差值为 。
当有r 个多余观测时,则平差值 应满足r 个平差值条件方程为:⎪⎪⎭⎪⎪⎬⎫=++++=++++=++++0ˆˆˆ0ˆˆˆ0ˆˆˆ221122112211οοοr L r L r L r b L b L b L b a L a L a L a n n n n n n (9-1) 式中i a 、i b 、…i r (i =1、2、…n )——为条件方程的系数;0a 、0b 、…0r ——为条件方程的常项数以ii i v L L +=ˆ(i =1、2、…n )代入(9-1)得条件方程(9-2)式中a w 、b w 、……r w 为条件方程的闭合差,或称为条件方程的不符值,即(9-3) 令⎪⎪⎪⎪⎪⎭⎫⎝⎛=⨯n n n n r r r r b b b a a a A212121⎪⎪⎭⎪⎪⎬⎫++⋅⋅⋅++=++⋅⋅⋅++=++++=022110221102211r L r L r L r w b L b L b L b w a L a L a L a w n n n n n b n n a ⎪⎪⎭⎪⎪⎬⎫=++⋅⋅⋅++=++⋅⋅⋅++=++⋅⋅⋅++000221122112211r n n b n n a n n w v r v r v r w v b v b v b w v a v a v a ⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⨯n n L L L L 211⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⨯n n L L L L ˆˆˆˆ2111⨯n L nn P ⨯1⨯n V 1ˆ⨯n L 1ˆ⨯n L则(9-1)及(9-2)上两式的矩阵表达式为0ˆ0=+A LA (9-4) 0=+W AV (9-5)上改正数条件方程式中V 的解不是唯一的解,根据最小二乘原理,在V 的无穷多组解中,取PV V T = 最小的一组解是唯一的,V 的这一组解,可用拉格朗日乘数法解出。
平差知识点总结(总10页) -CAL-FENGHAI.-(YICAI)-CompanY One 1-CAL-本页仅作为文档封面,使甬请直接删除测量平差知识点观测误差包括:粗差、系统误差、偶然误差。
粗差:即粗大误差,或者说是一种大量级的误观测差,是由观测过程中的差错造成的。
发现粗差的方法:进行必要的重复测量或多余观测,采用必要而又严格的检核、验算等,发现后舍弃或重测。
系统误差:在相同条件下进行一系列观测,如果误差在大小、符号表现出一致性,或者在观测过程中按一定的规律变化,或者为一常数,这种误差称为系统误差。
消除或削弱的方法:采取合理的操作程序(正、倒镜,中间法,对向观测等);用公式改正,即加改正裁(如钢尺量距时的尺长误差等)。
偶然误差:在相同条件下进行一系列观测,如果误差在大小、符号上表现出偶然性,即就单个误差而言,该误差的大小和符号没有规律性,但就大量误差的总体而言,具有一定的统计规律,这种误差称为偶然误差,或者随机误差。
采臥措施:处理带仔偶然误差的观测值,就是木课程的内容,也叫做测量平差。
偶然谋差又称随机误差,有以I、•四个特性:1)一定观测条件下,误差绝对值有一泄限值(有限性);2)绝对•值较小的课差比绝对值较人的课差出现概率人(渐降性):3)绝对值相等的正负误差出现概率相同(对称性);4)偶然谋差的数学期望为零(抵偿性)。
衡量精度的指标有五个,分别眉中矗、平均矗、或然i灵差、极限i灵差以及相对中谋差。
其中中矗和极限误差以及相对中保差是工程測量中常用的指标。
5、相对谋差颠差、屮促差、极限促差等指标,对于菜些观测结果,有时还•侮全表达观测结果的好坏,例如,分别丈1000m及500⑴的两段距离,它们的中课差均为±2cn】,虽然两者■的中误差相同,但就M位长度而言,两者精度并彳、相同。
显然询耆的郴对蒂度比后者耍高。
一般:而言,一些与长度有关的观测俺或其函数值,单纯用中误苣还不能区分出蒂度的高低,所以常用相对课差。
1、什么是观测量的真值?任何观测量,客观上总存在一个能反映其真正大小的数值,这个数值称为观测量的真值。
2、什么是观测误差?观测量的真值与观测值的差称为观测误差。
3、什么是观测条件?仪器误差、观测者和外界环境的综合影响称为观测条件。
4、根据误差对观测结果的影响,观测误差可分为哪几类?根据误差对观测结果的影响,观测误差可分为系统误差和偶然误差两类。
5、在测量中产生误差是不可避免的,即误差存在于整个观测过程,称为误差公理。
6、观测条件与观测质量之间的关系是什么?观测条件好,观测质量就高,观测条件差,观测质量就低。
7、怎样消除或削弱系统误差的影响?一是在观测过程中采取一定的措施;二是在观测结果中加入改正数。
8、测量平差的任务是什么?⑴ 求观测值的最或是值(平差值); ⑵ 评定观测值及平差值的精度。
第二章:误差理论与平差原则1、描述偶然误差分布常用的三种方法是什么? ⑴ 列表法;⑵ 绘图法;⑶ 密度函数法。
2、偶然误差具有哪些统计特性?(1) 有界性:在一定的观测条件下,误差的绝对值不会超过一定的限值。
(2) 聚中性:绝对值较小的误差比绝对值较大的误差出现的概率要大。
(3) 对称性:绝对值相等的正负误差出现的概率相等。
(4) 抵偿性:偶然误差的数学期望或偶然误差的算术平均值的极限值为0。
3、由偶然误差特性引出的两个测量依据是什么?⑴ 制定测量限差的依据;⑵ 判断系统误差(粗差)的依据。
4、什么叫精度?精度指的是误差分布的密集或离散的程度。
5、观测量的精度指标有哪些?(1) 方差与中误差; (2) 极限误差; (3) 相对误差。
6、极限误差是怎样定义的?在一定条件下,偶然误差不会超过一个界值,这个界值就是极限误差。
通常取三倍中误差为极限误差。
当观测要求较严时,也可取两倍中误差为极限误差。
7、误差传播律是用来解决什么问题的? 误差传播律是用来求观测值函数的中误差。
8、应用误差传播律的实际步骤是什么?(1) 根据具体测量问题,分析写出函数表达式),,,(21n x x x f z =; (2) 根据函数表达式写出真误差关系式n nx x fx x f x x f z ∆∂∂++∆∂∂+∆∂∂=∆ 2211; (3) 将真误差关系式转换成中误差关系式。

一、水准网条件平差示例 范例:有一水准网(如图8-3所示),已知点A ,B 的高程为: HA=50.000m , HB=40.000 m ,观测高差及路线长度见表8-1。
试用条件平差求:(1) 各观测高差的平差值;(2) 平差后P 1到P 2点间高差的中误差。
图8-3【解】1)、求条件方程个数;由图易知:n=7,t=3,条件式r=4。
故应列4个平差值条件方程,三个闭合环,一个附和路线2)、列平差值条件方程; 所列4个平差值条件方程为:⎪⎪⎭⎪⎪⎬⎫=-+-=--=-+=+-0ˆˆ0ˆˆˆ0ˆˆˆ0ˆˆˆ31643765521BA H H h h h h h h h h h h h 3)、转换成改正数条件方程;以ii i V L L +=ˆ代入上式可得: ⎪⎪⎭⎪⎪⎬⎫=-+-+-=--+--=-++-+=+-++-00003131643643765765521521B A H H h h v v h h h v v v h h h v v v h h h v v v 化简可得:⎪⎪⎭⎪⎪⎬⎫=--=+--=+-+=++-0403070731643765521mm mm mm mm v v v v v v v v v v v 可知条件方程系数阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-----000101010110011100000010011⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=2101001000210000210000010000001称对P ⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=2010010002000020000010000001称对Q ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-----=320125100141101300100110001101001100000110010002010102200211000000100114)、组成法方程; 先求权阵P ;以1km 观测高差为单位权观测高差,则: 11=P ,12=P ,213=P ,214=P ,15=P ,16=P ,217=P ,而各观测高差两两相互独立,所以权阵为:,则协因数阵为:则,法方程的系数阵Naa 为:⎥⎥⎦⎤⎢⎢⎣⎡-----⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-----==-=00010101011001110000001001120100100020000200000100000010001010101100111000000100111TT AQA T A AP aa N 称对所以,法方程为:043773212510014110134321=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----k k k k 5)、解算法方程,求出联系数K⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡34831.213483.002247.177528.2437758427.025843.012360.023596.025843.032584.011236.012360.012360.011236.031461.014607.023596.012360.014608.046067.04377320125100141101314321k k k k 6)、求V 及高差平差值Lˆ 所以4210.212.118.3213.0214.418.214.0ˆ22222220⨯+⨯-+⨯-+⨯-+⨯-+⨯+⨯-==)()()()()(r PV V T σ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡-----=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-------⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡==045.2157.1798.3270.0427.4775.2427.034831.213483.002247.177528.2002001100011020022000001100134831.213483.002247.177528.200001010101100111000000100112010010002000020000010000001m m T K T QA V 称对mmmm v v v v v v v h h h h h h h h h h h h h h L ⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----+⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=5020.108548.56472.45007.143556.200028.153556.100.22.18.33.04.48.24.0500.10856.5651.4501.14360.20000.15356.10ˆˆˆˆˆˆˆˆ7654321765432176543217)、精度评定1)、单位权方差估值计算mm 98.24605.35±==2)、建立所求精度的平差值函数的算式,并按误差传播律求平差值函数的精度 依题意列平差值函数为: 5ˆh =ϕ 则:[]Tf 0010000=[][][][]51687.048313.01)16853.3146.0(1001111236.001124.016853.03146.0100110011111ˆˆ=-=+-=⨯---=-=-=--TTT T T aaaa N AQf N QA f Qf fQ ϕϕ所以:mm Q 14.251687.098.2ˆˆ0ˆ±=⨯==ϕϕϕσσ【答】:各观测高差的平差值为:}{m m m m m m m5020.108548.56472.45007.143556.200028.153556.10平差后P1到P2点间高差的中误差为:±2.14mm987654321ACPB 图8-11二、测角网条件平差 范例:有一测角网(如图8-11所示),A 、B 、C 三点为已知三角点,P 为待定点。
测量平差资料第⼀章绪论⼀、观测误差1、为什么要进⾏观测必要观测、多余观测2、误差存在的现象3、误差产⽣的原因观测条件:观测仪器、观测者、外界条件4、误差的分类粗差、系统误差、偶然误差5、误差的处理办法⼆、测量平差的简史和发展三、测量平差的两⼤任务及本课程的主要内容第⼆章误差分布与精度指标⼀、偶然误差的规律性1、随机变量2、偶然误差的分布正态分布3、偶然误差的统计特性由统计分析可以看出,偶然误差具有下列特性:1、在⼀定的观测条件下,偶然误差的绝对值有⼀定的限值,即超过⼀定限值的偶然误差出现的概率为零;2、绝对值较⼩的偶然误差⽐绝对值较⼤的偶然误差出现的概率⼤;3、绝对值相等的正负偶然误差出现的概率相同;4、偶然误差的理论平均值为零⼆、随机变量的数字特征(1)反映随机变量集中位置的数字特征---数学期望(2)反映随机变量偏离集中位置的离散程度----⽅差(3)映两两随机变量x、y相关程度的数字特征---协⽅差3、协⽅差(a) 定义相关系数三、衡量精度的指标1、⽅差和中误差2、平均误差3、或然误差4、极限误差5、相对(中、真、极限)误差四、随机向量的数字特征1、随机向量2、随机向量的数学期望3、随机向量的⽅差-协⽅差阵协⽅差阵的定义协⽅差阵的特点4、互协⽅差阵协⽅差阵的定义协⽅差阵的特点五、精度准确度精确度观测值的质量取决于观测误差(偶然误差、系统误差、粗差)的⼤⼩。
1、精度:描述偶然误差,可从分布曲线的陡峭程度看出精度的⾼低。
2、准确度:描述系统误差和粗差,可⽤观测值的真值与观测值的数学期望之差来描述,即:3、精确度:描述偶然误差、系统误差和粗差的集成,精确度可⽤观测值的均⽅误差来描述,即:即观测值中只存在偶然误差时,均⽅误差就等于⽅差,此时精确度就是精度。
七、⼩结第三章协⽅差传播律⼏个概念1、直接观测量2、⾮直接观测量---观测值的函数⽔准测量导线测量三⾓形内⾓平差值3、独⽴观测值4、⾮独⽴观测值----相关观测值独⽴观测值各个函数之间不⼀定独⽴5、误差传播律6、协⽅差传播律⼀、观测值线性函数的⽅差设观测向量L及其期望和⽅差为:若观测向量的多个线性函数为三、两个函数的互协⽅差阵四、⾮线性函数的情况五、多个观测向量⾮线性函数的⽅差—协⽅差矩阵设观测向量的t个⾮线性函数为:对上式求全微分,得六、协⽅差传播律的应⽤1、⽔准测量的精度2、距离丈量的精度3、同精度独⽴观测值算术平均值的精度七、应⽤协⽅差传播律时应注意的问题(1)根据测量实际,正确地列出函数式;(2)全微分所列函数式,并⽤观测值计算偏导数值;(3)计算时注意各项的单位要统⼀;(4)将微分关系写成矩阵形式;(5)直接应⽤协⽅差传播律,得出所求问题的⽅差-协⽅差矩阵。
必要观测数确定(平差讲课⽤)测量平差中必要观测数的确定⽅法⼀、控制⽹必要起算数据概述1.控制⽹必要起算数据的要求:见下表。
控制⽹种类必要起算数据个数必要起算数据种类⽔准⽹测⾓⽹测边⽹/边⾓⽹/导线⽹143⼀点⾼程两点坐标或⼀点坐标、⼀边长和⼀边⽅位⾓⼀点坐标和⼀边⽅位⾓2.平差计算时控制⽹的起算数据必须满⾜要求也就是说,确定必要观测数t时,控制⽹的起算数据⼀定已经满⾜了要求。
满⾜要求的起算数据不仅种类满⾜要求,且其个数⼀定等于或⼤于其必要起算数据的个数。
起算数据满⾜要求有两种情况:⼀是控制⽹的起算数据本⾝就满⾜要求;另⼀是控制⽹的起算数据本⾝不满⾜要求,经假定或实测补⾜后满⾜要求。
补充的起算数据也视为已知。
⼆、控制⽹必要观测数的计算⽅法起算数据可分为两类:⼀类是点位起算数据,如坐标、⾼程等;另⼀类是⾮点位起算数据,常见为平⾯控制⽹中的⽅位⾓、边长等。
⽔准⽹中⽆此类起算数据。
下⾯分别就这两种情况来讨论必要观测数t的确定。
1.起算数据只含点位起算数据,不含⾮点位起算数据。
显然,⽔准⽹的必要观测数t就是此类未知点(⾼程)的个数;⽽平⾯控制⽹的必要观测数就是此类未知点坐标的个数,也即为点数的2倍。
若以P表⽰控制⽹中未知点的个数,则此种情况下必要观测数t的计算⽅法为⽔准⽹:t=P平⾯控制⽹:t=2P2.起算数据既含有点位起算数据,⼜包含⾮点位起算数据。
包含⾮点位起算数据只有平⾯控制⽹。
这类数据都对应着⼀条边——有两个端点。
根据该边与控制⽹的连接情况,⾮点位起算数据⼜分为两类:⼀类是两端点都包含在控制⽹内部,如图5中的S0、α1、α2,图7中的α0,图9中的α1等,称为第⼀类⾮点位起算数据。
另⼀类是⼀端与控制⽹相连,⼀端⾃由,该边好像悬挂于控制⽹上,⼀般为已知⽅位⾓,如图6中的α0,图9中的αA、αB、αC等,称为第⼆类⾮点位起算数据或悬挂边。
如果假设⾮点位起算数据未知,也即⽹中只有点位起算数据。
则可看出:第⼀类⾮点位起算数据与确定未知点坐标有关:确定未知点坐标需要测定⽅位⾓、距离。
测量平差知识点1、测量学的研究内容:测定和测设。
2、测定:将地⾯上客观存在的物体通过测量的⼿段将其测成数据或图形。
3、测设:就是将测量的⼿段标定在地⾯上。
4、⽔准⾯:静⽌的⽔⾯。
5、⼤地⽔准⾯:⽔准⾯与静⽌的平均海⽔⾯相重合的闭合⽔准⾯。
6、铅垂线:重⼒⽅向线,是测量⼯作的基准线。
7、地球椭球⾯是测量⼯作的基准⾯。
8、地物:地⾯上⼈造或天然固定的物体:地貌:地⾯⾼低起伏形态。
9、测量上常⽤坐标系:天⽂、⼤地、⾼斯平⾯直⾓、独⽴平⾯直⾓。
10、绝对⾼程:地⾯点沿铅垂线到⼤地⽔准⾯的距离。
相对⾼程:某点到任意⽔准⾯的距离。
11、⾼差:地⾯上两点之间⾼程差。
12、半径为10km范围内⾯积为320km2之内可以⽤⽔平⾯代替⽔准⾯时距离产⽣的误差可忽略不计;测距范围的100km2时,⽤平⾯代替⽔准⾯时对⾓度的影响可忽略不计;在⾼程测量中即使很短的距离也不可忽略。
13、测量⼯作的原则:a由整体到局部、由控制到碎部;b步步检核。
14、测量的基本⼯作:测⾓、量边、测⾼程。
15、测绘的基本⼯作:确定地⾯点的基本位置。
16、施⼯测量包括:建筑物施⼯放样、建筑物变形监测、⼯程竣⼯测量。
17、⾼程测量:测量地⾯上各点⾼程的⼯作。
18、⽔准测量的实质:测量地⾯上两点之间的⾼差,是利⽤⽔准仪所提供的⼀条⽔平视线来实现的。
19、⾼差计算⽅法:⾼差法、仪⾼法。
20、⽔准仪按构造可分为:微倾式、⾃动安平、数字⽔准仪,及⽔准尺和尺垫。
21、DS3构造:望远镜、⽔准器,基座。
22、⽔准仪轴线之间的⼏何条件:a圆⽔准器轴平⾏于竖轴b⼗字丝横丝垂直于竖丝c ⽔准管轴平⾏于视准轴。
23、尺垫的作⽤:减少⽔准尺下沉和标志转点。
24、⽔准尺的使⽤:粗平、瞄准、精平、读数。
24、⽔准点的分类:永久性和临时性。
25、测站的检核⽅法:双⾯尺法和双仪⾼法。
26、⽔准路线检核⽅法:闭合⽔准路线、附合⽔准路线、⽀⽔准路线、⽔准⽹。
27、误差:仪器误差,观测误差、外界条件的影响。