多自由度系统动力学方程
- 格式:ppt
- 大小:1.94 MB
- 文档页数:15
六关节机械臂拉格朗日动力学方程六关节机械臂是一种多自由度机械结构,常见于工业制造、医疗器械等领域,具有灵活、高精度的特点。
在进行机械臂运动控制时,拉格朗日动力学方程是一种重要的数学工具,可以描述机械臂的运动学和动力学特性。
本篇文章将详细介绍六关节机械臂拉格朗日动力学方程的推导过程和应用。
**一、机械臂的构造**六关节机械臂由6个关节连接而成,每个关节可以进行转动运动。
机械臂的末端往往安装有工具或夹具,用于完成各种任务。
机械臂上的每个关节都有一个旋转轴和一个驱动器,通过控制驱动器的运动来控制机械臂的姿态和位置。
**二、运动学分析**在进行动力学分析之前,首先需要对机械臂的运动进行数学建模,得到机械臂各关节的运动学方程。
常用的方法是使用旋转矩阵和欧拉角来描述机械臂的姿态。
将机械臂的姿态表示为旋转矩阵,可以得到机械臂末端位姿与各个关节角度之间的关系。
**三、拉格朗日动力学方程的推导**拉格朗日动力学方程是用于描述机械系统的运动学和动力学特性的重要数学工具。
其基本思想是从系统的运动学模型出发,推导出系统的动力学模型。
1.定义广义坐标和广义速度:根据机械臂的运动学模型,引入广义坐标和广义速度来描述系统的状态,广义坐标用于表示机械臂各关节的角度,广义速度用于表示机械臂各关节的角速度。
2.动能和势能的计算:根据机械臂的构造和运动特点,可以计算出机械臂的动能和势能。
机械臂的动能可以分解为各个关节的动能之和,势能可以表示为机械臂的重力势能。
3.拉格朗日函数的建立:定义拉格朗日函数为系统的动能减势能,即L = T - V。
4.拉格朗日方程的推导:根据拉格朗日函数的定义,可以通过对拉格朗日函数求导来得到系统的运动方程,即拉格朗日方程。
拉格朗日方程描述了系统的动力学特性,包括系统的运动学关系和动力学关系。
**四、应用**通过求解六关节机械臂的拉格朗日动力学方程,可以得到机械臂的运动方程。
这些方程可以用于机械臂的运动规划、轨迹跟踪、运动控制等领域。
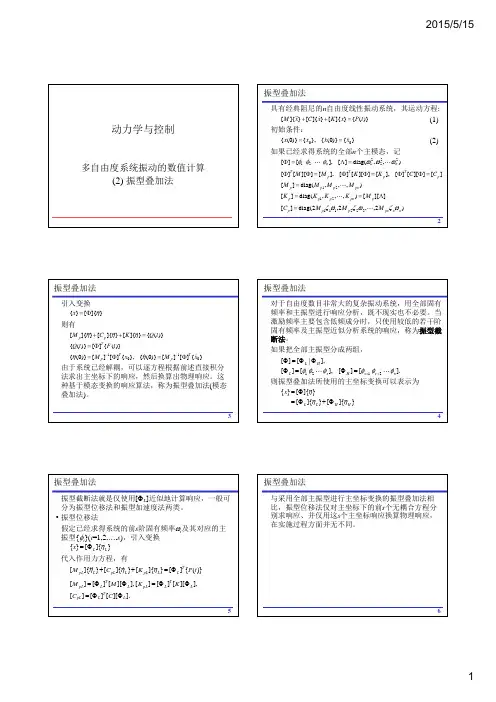
船体振动基础1第章多自由度系统的振第2章多自由度系统的振动一、引言二、两自由度系统的振动三、多自由度系统的振动四、振动方程建立的其他方法2有阻尼的多自由度系统振动1、拉格朗日方程式1、拉格朗日方程式P38拉格朗日法是建立微分方程一种简单的方法:先求出系统的动能、势能,进而得出质量矩阵和刚度矩阵.优点:系统的动能和势能都是标量,无需考虑力的方向。
141、拉格朗日方程式P38拉格朗日第二类方程式适用于完整约束的系统。
完整约束完整约束:当约束方程本身或约束方程通过积分后可以下式所示的形式表示时,称为完整约束。
不完整约束:当约束方程本含有不能积分的速度项时,系统的约束称为不完整约束。
具有不完整约束的系统,系统的自由度不等于广义坐标数自由度数小于广义坐标数于广义坐标数,自由度数小于广义坐标数。
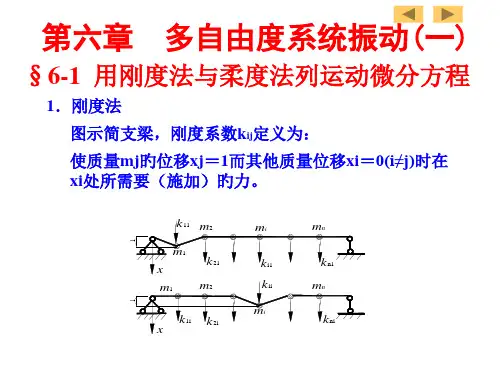
151、拉格朗日方程式P3811•位移方程和柔度矩阵P40对于静定结构,有时通过柔度矩阵建立位移方程比通过对于静定结构有时通过m1x1x2以准静态方式作用在梁上。
梁只产生位移(即挠度),不产生加速度。
的静平衡位置为坐标P1=1 f11 f21 f12P2=1 f22(1)P1 = 1、P2 = 0 时 m1 位移:x1 = f11 m2 位移:x2 = f 21 (3)P1、P2 同时作用 m1 位移: 位移 x1 = f11 P 1 + f12 P 2 m2 位移:x2 = f 21 P 1 + f 22 P 2(2)P1 = 0、P2 = 1 时 m1 位移:x1 = f12 m2 位移:x2 = f 22P1 m1 x1 x2 P2 m2P1=1 f11 f21 f12 P1 m1 x1P2=1 f22 P2 m2 x2P 同时作用时 1、P 2 同时作用时:x1 = f11P 1 + f12 P 2 x2 = f 21P 1 + f 22 P 2矩阵形式 X = FP 矩阵形式:⎡ x1 ⎤ X =⎢ ⎥ ⎣ x2 ⎦f ij 柔度影响系数f12 ⎤ f 22 ⎥ ⎦⎡ f11 F=⎢ ⎣ f 21⎡P 1⎤ P=⎢ ⎥ ⎣ P2 ⎦物理意义: 系统仅在第 j 个坐标受到 单位力作用时相应于第 i 个坐标上产生的位移柔度矩阵P1 m1 x1P2 m2 x2P1(t) m1 m2P2(t)&1 m1 & x&2 m2 & xX = FP⎡ x1 ⎤ ⎡ f11 ⎢x ⎥ = ⎢ f ⎣ 2 ⎦ ⎣ 21 f12 ⎤ ⎡ P 1⎤ ⎢P ⎥ f 22 ⎥ ⎦⎣ 2 ⎦当P 1、P 2 是动载荷时 集中质量上有惯性力存在⎡ x1 ⎤ ⎡ f11 ⎢x ⎥ = ⎢ f ⎣ 2 ⎦ ⎣ 21 f12 ⎤ ⎡ P && 1 (t ) − m1 x1 ⎤ ⎢ P (t ) − m & ⎥ f 22 ⎥ & x 2 2⎦ ⎦⎣ 2⎡ x1 ⎤ ⎡ f 11 ⎢x ⎥ = ⎢ f ⎣ 2 ⎦ ⎣ 21位移方程:f 12 ⎤⎛ ⎡ P1 (t ) ⎤ ⎡m1 ⎜⎢ −⎢ ⎥ ⎥ ⎜ f 22 ⎦⎝ ⎣ P2 (t ) ⎦ ⎣ 0&1 ⎤ ⎞ 0 ⎤⎡ & x ⎟ ⎥ ⎢ ⎥ &2 ⎦ ⎟ m2 ⎦ ⎣ & x ⎠&& ) X = F ( P − MXP1(t) m1 m2P2(t)⎡ x1 ⎤ X =⎢ ⎥ ⎣ x2 ⎦⎡P 1 (t ) ⎤ P=⎢ ⎥ P ( t ) ⎣ 2 ⎦&1 m1 & x&2 m2 & x位移方程 位移方程:&& ) X = F ( P − MX也可按作用力方程建立方程:&& + KX = P MX刚度矩阵&& + X = FP FMX柔度矩阵与刚度矩阵的关系 柔度矩阵与刚度矩阵的关系:&& KX = P − MX若K非奇异F=K−1FK = I&& ) X = K −1 ( P − MX应当注意:对于允许刚体运动产生的系统(即具有刚体自由度的系统) , 柔度矩阵不存在。
三自由度动力学模型简介三自由度动力学模型是一种用于描述物体在三维空间中运动的模型。
它可以用来研究机器人、飞行器、汽车等复杂系统的运动行为和控制策略。
本文将介绍三自由度动力学模型的基本概念、数学表示和应用领域。
一、基本概念1. 动力学动力学是研究物体运动及其原因的学科。
在三自由度动力学模型中,我们主要关注物体的运动规律和所受的力和力矩。
2. 自由度自由度是指描述物体运动所需独立参数的数量。
在三自由度动力学模型中,物体可以绕三个轴进行旋转,因此具有三个自由度。
3. 动力学模型动力学模型是用来描述物体运动的数学模型。
它通过建立物体的运动方程来预测物体的运动状态和受力情况。
二、数学表示1. 位移和速度在三自由度动力学模型中,我们通常使用欧拉角来描述物体的姿态。
欧拉角包括俯仰角、偏航角和滚转角,分别表示绕x轴、y轴和z轴的旋转角度。
物体的位移可以用三个欧拉角表示。
物体的速度可以通过对位移关于时间的导数来得到。
例如,物体在x轴上的速度可以表示为dx/dt。
2. 加速度和力矩物体的加速度可以通过对速度关于时间的导数来得到。
例如,物体在x轴上的加速度可以表示为d²x/dt²。
物体受到的力可以通过牛顿第二定律来描述。
力矩可以通过对力关于时间的导数来得到。
例如,物体绕x轴的力矩可以表示为dLx/dt,其中Lx是绕x轴的力矩。
3. 动力学方程动力学方程是描述物体运动行为的方程。
在三自由度动力学模型中,动力学方程可以表示为:M * a = F其中,M是质量矩阵,a是加速度向量,F是力和力矩向量。
三、应用领域三自由度动力学模型在许多领域都有广泛的应用,下面以机器人和飞行器为例进行介绍。
1. 机器人三自由度动力学模型可以用于研究机器人的运动和控制。
通过建立机器人的动力学模型,可以预测机器人在不同工作状态下的运动行为,并设计相应的控制策略。
2. 飞行器三自由度动力学模型可以用于研究飞行器的姿态控制和稳定性分析。