51单片机基本知识汇总
- 格式:docx
- 大小:3.55 KB
- 文档页数:2
51单片机知识点1. 什么是51单片机?51单片机是一种基于哈佛结构的微处理器,由Intel公司于1980年推出。
它采用了8位的CPU架构和内置ROM、RAM、I/O等外设,可以实现控制、通讯、数据处理等功能。
2. 51单片机的特点- 体积小、功耗低:由于采用了集成化设计,使得单片机的体积非常小,功耗也很低。
- 易于编程:由于内置了大量外设和指令集,使得编写程序变得十分简单。
- 成本低廉:与其他微处理器相比,51单片机的成本较为低廉。
- 可靠性高:由于采用了高度集成化设计,使得其可靠性非常高。
3. 51单片机的硬件架构51单片机主要由以下几部分组成:- CPU核心:包括ALU(算术逻辑运算器)、寄存器组、程序计数器等。
- 存储器:包括ROM(只读存储器)、RAM(随机存储器)等。
- 外设接口:包括串口、并口、定时计数器等。
- 中断系统:用于处理各种事件和异常。
4. 51单片机的指令集51单片机的指令集包括基本指令、扩展指令和特殊指令。
其中,基本指令包括算术逻辑指令、移位指令、跳转指令等;扩展指令包括乘法、除法等高级运算;特殊指令包括中断、IO操作等。
5. 51单片机的编程语言51单片机的编程语言主要有汇编语言和C语言两种。
汇编语言直接操作硬件,速度快,但难度较大;C语言则更加简单易学,但速度相对较慢。
6. 51单片机的开发环境51单片机的开发环境主要有Keil C51和SDCC两种。
Keil C51是一款商业化软件,具有良好的兼容性和稳定性;SDCC则是一款开源软件,支持多种平台。
7. 51单片机的应用领域由于其体积小、功耗低、成本低廉等优点,51单片机被广泛应用于各个领域。
例如:家电控制、电子游戏、车载电子设备等。
8. 51单片机常见问题及解决方法- 如何解决程序无法烧录?可能是芯片内部电压不稳定,可以尝试更换芯片或更换烧录器。
- 如何解决程序无法运行?可能是代码有误或硬件连接有问题,可以检查代码和硬件连接是否正确。
51单片机基础知识单片机作为一种嵌入式微控制器,具有广泛的应用领域和技术需求。
本文将介绍51单片机的基础知识,包括其概述、硬件结构、编程语言和开发环境等内容。
通过本文的学习,读者可以对51单片机有初步了解,并为之后的学习和应用打下基础。
一、概述51单片机,是指Intel公司开发的一种8位微处理器。
它以其简单、稳定和可靠的特点,成为嵌入式系统开发中最常用的单片机之一。
51单片机由存储器、中央处理器、输入输出端口、计时器/计数器和各种外围设备组成。
二、硬件结构51单片机的硬件结构主要包括中央处理器、存储器、输入输出端口和计时器/计数器。
1.中央处理器51单片机的中央处理器是一种基于哈佛架构的8位微处理器,具有高性能和低功耗的特点。
它可以执行指令、进行算术逻辑运算和控制外围设备的工作。
2.存储器51单片机的存储器包括程序存储器和数据存储器。
程序存储器用来存储运行的程序代码,而数据存储器用于存储程序需要的数据。
3.输入输出端口51单片机通过输入输出端口与外部设备进行通信。
输入端口用于接收外部信号,输出端口用于输出控制信号。
4.计时器/计数器51单片机内置了多个计时器/计数器,用于定时和计数应用。
它们可以实现精确的时间控制,并为系统提供准确的时间基准。
三、编程语言51单片机的常用编程语言有汇编语言和C语言。
汇编语言是51单片机最早的编程语言,它直接与硬件进行交互,执行效率高。
而C语言是一种高级编程语言,具有结构化、可移植等特点,编写的程序更加易读易维护。
1.汇编语言汇编语言是一种低级别的编程语言,需要程序员直接处理寄存器和内存地址。
它的语法相对复杂,但可以更直接地控制硬件资源,实现更高效的程序执行。
2.C语言C语言是一种结构化的高级编程语言,具有简洁、易读和可移植等特点。
C语言程序需要通过编译器将源代码转化为机器指令,然后才能在51单片机上运行。
四、开发环境51单片机的开发环境包括硬件开发工具和软件开发工具。
51单片机初学知识点总结1. 什么是51单片机:51单片机是指Intel公司生产的8位单片机芯片系列。
51单片机由中央处理器单元(CPU)、随机存储器(RAM)、只读存储器(ROM)、输入输出端口以及中断系统等组成。
2. 51单片机的发展历史:51单片机最早在1980年由Intel公司发布,之后逐渐发展壮大。
目前,市面上有很多公司都生产和销售51单片机。
3. 51单片机的架构:51单片机采用Harvard结构,即程序存储器与数据存储器分开。
程序存储器分为片内存储器和片外存储器,数据存储器包括RAM和特殊功能寄存器。
4. 51单片机的寄存器:51单片机有一组特殊功能寄存器,用于存储和控制各种系统状态。
这些寄存器可以分为SFR(Special Function Register)和控制寄存器两种类型。
5.51单片机的引脚和IO口:51单片机有40个引脚,其中一些引脚是I/O(输入/输出)口。
这些I/O口可以配置为输入或输出,并可以被程序控制。
6.51单片机的时钟系统:51单片机需要一个时钟源来提供时钟信号。
时钟源可以是外部晶体振荡器或者片内RC振荡器。
7.51单片机的存储器:51单片机具有不同类型的存储器,包括内存区域、堆栈区域和特殊功能寄存器。
内存区域包括RAM和ROM,堆栈区域用于保存中断处理和函数调用的返回地址。
8.51单片机的指令集:51单片机具有丰富的指令集,可以执行各种操作,例如算术运算、逻辑运算、位操作和跳转等。
9.51单片机的中断系统:51单片机具有中断系统,可以响应外部中断和定时器中断。
中断可以打断当前执行的程序,并转移到中断处理函数。
10.51单片机的编程和调试:51单片机的编程可以使用汇编语言或高级语言(如C语言)进行。
调试可以使用模拟器或者仿真器进行。
11.51单片机的应用领域:51单片机广泛应用于各种控制系统和嵌入式系统,例如家用电器控制、电动工具、汽车电子等。
12.51单片机的扩展接口:51单片机可以与其他外设连接,例如LCD显示屏、键盘、温度传感器等。
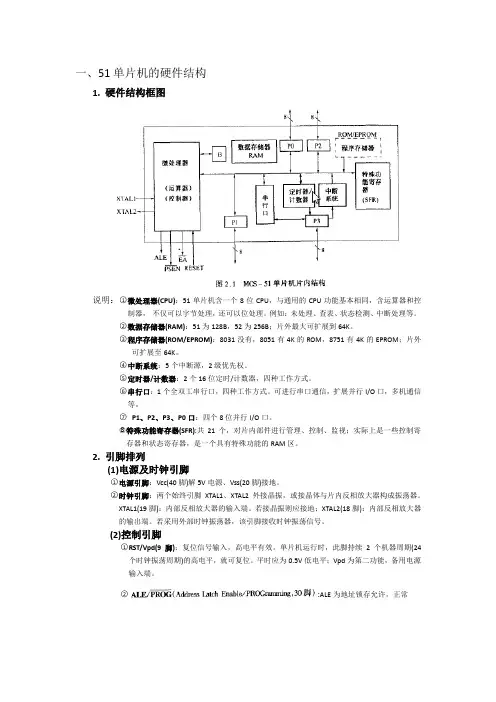
一、51单片机的硬件结构1. 硬件结构框图说明:○1微处理器(CPU):51单片机含一个8位CPU,与通用的CPU功能基本相同,含运算器和控制器,不仅可以字节处理,还可以位处理。
例如:未处理、查表、状态检测、中断处理等。
○2数据存储器(RAM):51为128B,52为256B;片外最大可扩展到64K。
○3程序存储器(ROM/EPROM):8031没有,8051有4K的ROM,8751有4K的EPROM;片外可扩展至64K。
○4中断系统:5个中断源,2级优先权。
○5定时器/计数器:2个16位定时/计数器,四种工作方式。
○6串行口:1个全双工串行口,四种工作方式。
可进行串口通信,扩展并行I/O口,多机通信等。
○7P1、P2、P3、P0口:四个8位并行I/O口。
○8特殊功能寄存器(SFR):共21个,对片内部件进行管理、控制、监视;实际上是一些控制寄存器和状态寄存器,是一个具有特殊功能的RAM区。
2. 引脚排列(1)电源及时钟引脚○1电源引脚:Vcc(40脚)解5V电源、Vss(20脚)接地。
○2时钟引脚:两个始终引脚XTAL1、XTAL2外接晶振,或接晶体与片内反相放大器构成振荡器。
XTAL1(19脚):内部反相放大器的输入端。
若接晶振则应接地;XTAL2(18脚):内部反相放大器的输出端。
若采用外部时钟振荡器,该引脚接收时钟振荡信号。
(2)控制引脚○1RST/Vpd(9脚):复位信号输入,高电平有效。
单片机运行时,此脚持续2个机器周期(24个时钟振荡周期)的高电平,就可复位。
平时应为0.5V低电平;Vpd为第二功能,备用电源输入端。
○2:ALE为地址锁存允许,正常工作时,ALE不断输出正脉冲信号。
当访问外部存储器时,ALE输出信号的负跳变沿用作低8位地址的锁存信号;PROG’为编程脉冲输入端。
○3PSEN’(Program Strobe Enable,29脚):程序存储器允许输出控制端。
低电平是外部程序存储器选通。

第1章 51单片机的基础知识51单片机是一种广泛应用的嵌入式微控制器,具有强大的功能和灵活性。
在学习和使用51单片机之前,了解其基础知识是至关重要的。
本章将介绍51单片机的基础知识,包括硬件结构、寄存器、指令集和编程语言。
1.1 51单片机的硬件结构51单片机的硬件结构是指其内部的组成部分和外部连接。
51单片机包含中央处理器(CPU)、存储器、输入/输出(I/O)口、定时器/计数器、串行通信口等功能模块。
这些功能模块共同协作,完成各种任务。
1.1.1 中央处理器(CPU)51单片机的中央处理器是核心部件,负责执行指令、控制程序运行和处理数据。
51单片机采用哈佛结构,将程序存储器和数据存储器分开。
它包含一个8位的累加器(A)和一个指令寄存器(IR),用于指令的执行。
1.1.2 存储器51单片机的存储器包括程序存储器和数据存储器。
程序存储器用于存储程序指令,可以是内部存储器或外部存储器。
数据存储器用于存储程序运行中产生的数据,包括RAM和ROM。
1.1.3 输入/输出(I/O)口51单片机具有一定数量的I/O口,用于与外部设备进行数据交互。
输入口用于接收外部信号,输出口用于发送数据或控制外部设备。
它们可以是并行口或串行口,根据需要进行配置。
1.1.4 定时器/计数器定时器/计数器是51单片机的重要组成部分,用于产生定时延迟和计数脉冲。
定时器可以设置为定时模式或计数模式,定时器中断可用于实现时间控制和精确计时。
1.1.5 串行通信口串行通信口是51单片机与外部设备进行串行通信的接口,常用的有UART和SPI。
它们通过串行传输数据,实现与外部设备的数据交换和通信。
1.2 51单片机的寄存器51单片机具有一组特殊功能寄存器,用于配置和控制其各项功能。
这些寄存器负责存储和传输数据,执行各种功能操作。
常见的寄存器包括通用寄存器、状态寄存器、特殊功能寄存器等。
1.2.1 通用寄存器通用寄存器是用于存储临时数据的寄存器,包括8个存储器编号,分别为R0 - R7。
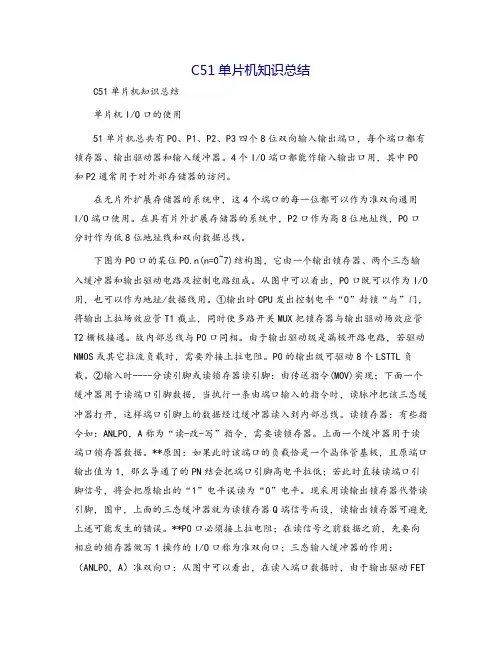
C51单片机知识总结C51单片机知识总结单片机I/O口的使用51单片机总共有P0、P1、P2、P3四个8位双向输入输出端口,每个端口都有锁存器、输出驱动器和输入缓冲器。
4个I/O端口都能作输入输出口用,其中P0和P2通常用于对外部存储器的访问。
在无片外扩展存储器的系统中,这4个端口的每一位都可以作为准双向通用I/O端口使用。
在具有片外扩展存储器的系统中,P2口作为高8位地址线,P0口分时作为低8位地址线和双向数据总线。
下图为P0口的某位P0.n(n=0~7)结构图,它由一个输出锁存器、两个三态输入缓冲器和输出驱动电路及控制电路组成。
从图中可以看出,P0口既可以作为I/O 用,也可以作为地址/数据线用。
①输出时CPU发出控制电平“0”封锁“与”门,将输出上拉场效应管T1截止,同时使多路开关MUX把锁存器与输出驱动场效应管T2栅极接通。
故内部总线与P0口同相。
由于输出驱动级是漏极开路电路,若驱动NMOS或其它拉流负载时,需要外接上拉电阻。
P0的输出级可驱动8个LSTTL负载。
②输入时----分读引脚或读锁存器读引脚:由传送指令(MOV)实现;下面一个缓冲器用于读端口引脚数据,当执行一条由端口输入的指令时,读脉冲把该三态缓冲器打开,这样端口引脚上的数据经过缓冲器读入到内部总线。
读锁存器:有些指令如:ANLP0,A称为“读-改-写”指令,需要读锁存器。
上面一个缓冲器用于读端口锁存器数据。
**原因:如果此时该端口的负载恰是一个晶体管基极,且原端口输出值为1,那么导通了的PN结会把端口引脚高电平拉低;若此时直接读端口引脚信号,将会把原输出的“1”电平误读为“0”电平。
现采用读输出锁存器代替读引脚,图中,上面的三态缓冲器就为读锁存器Q端信号而设,读输出锁存器可避免上述可能发生的错误。
**P0口必须接上拉电阻;在读信号之前数据之前,先要向相应的锁存器做写1操作的I/O口称为准双向口;三态输入缓冲器的作用:(ANLP0,A)准双向口:从图中可以看出,在读入端口数据时,由于输出驱动FET并接在引脚上,如果T2导通,就会将输入的高电平拉成低电平,产生误读。
1、单片机的机器周期、状态周期、振荡周期和指令周期之间是什么关系?答:一个机器周期恒等于6个状态周期或12个振荡周期,即1M=6S=12P。
2、存储器中有几个保留特殊功能的单元用做入口地址?作用是什么?答:MCS-51系列单片机的存储器中有6个保留特殊功能单元;作用:0000H为复位入口、0003H为外部中断0入口、000BH为T0溢出中断入口、0013H为外部中断1入口、001BH为T1溢出中断入口、0023H为串行接口中断入口。
3、开机复位后,CPU使用是的哪组工作寄存器?它们的地址是什么?CPU如何确定和改变当前工作寄存器组?答:开机复位后,CPU使用的是第0组工作寄存器。
它们的地址是00H~07H。
CPU通过对程序状态字PSW中RS1、RS0的设置来确定和改变当前工作寄存器组。
如:RS1、RS0为00则指向第0组;为01则指向第1组;为10则指向第2组;为11则指向第3组。
4、MCS-51的时钟周期、机器周期、指令周期的如何分配的?当振荡频率为8MHz时,一个单片机时钟周期为多少微秒?答:MCS-51的时钟周期是最小的定时单位,也称为振荡周期或节拍。
一个机器周期包含12个时钟周期或节拍。
不同的指令其指令周期一般是不同的,可包含有1~4个机器周期。
当振荡频率为8MHz时,一个单片机时钟周期为0.125μs 。
5、EA/V引脚有何功用?8031的引脚应如何处理?为什么?PP答:EA/V是双功能引脚:PP(1)EA接高电平时,在低4KB程序地址空间(0000H~0FFFH),CPU执行片内程序存储器的指令,当程序地址超出低4KB空间(1000H~FFFFH)时,CPU将自动执行片外程序存储器的指令。
(2)EA接低电平时,CPU只能执行外部程序存储器的指令。
8031单片机内部无ROM,必须外接程序存储器。
因此,8031的EA引脚必须接低电平。
在对8751单片机内部的 EPROM编程时,此引脚V外接+12V电压,用于固化EPROM程PP序。
51单片机基础知识必备一. 基础知识必备1 . 单片机复位引脚——RST当输入连续两个机器周期以上的高电平时为有效,用来完成单片机复位的初始化操作,复位后的程序计数器PC = 0000H,即复位后将从程序存储器的0000H单元读取第一条指令代码。
通俗的讲,就是单片机从头开始执行程序。
2.PSEN 全称是程序储存器允许输出控制端。
在读取外部程序储存器时,PSEN低电平有效,以实现外部程序储存器的读操作。
(内存足够了,没必要)3.电平重要知识点CMOS电路中不使输入端悬空,否则会造成逻辑混乱。
CMOS电平能驱动TTL电平,但是TTL电平不能驱动CMOS电平,需加上拉电阻4. 51系类扩展数据类型sfr——特殊功能寄存器的数据声明,声明一个8位寄存器。
sfr16 ——16位特殊功能寄存器的数据声明。
sbit ——特殊功能位声明,就是声明某一个特殊功能寄存器中的某一位。
bit ——位变量声明,当定义一个位变量时,可使用此符号。
5. 电阻的标志读数如果标称是103,就是10*10^3欧姆,150表示15*10^0欧姆,三位数表示5%精度,四位数表示1%精度6.要牢记,51MCU上电时,如果没有人为的控制IO状态,它所有的IO口都将是高电平,因此,我们没有必要写一句让锁存端置于高电平的语句7.和MCU有关的周期(1)时钟周期,也称震荡周期,定义为时钟频率的倒数。
MCU中最小的事件单位(2)状态周期,他是时钟周期的两倍(3)机器周期,MCU的基本操作周期,在一个操作周期内,MCU完成一个基本操作,如读取指令,储存器的读写。
它由12个时钟周期(6个状态周期组成)(4)指令周期,他是指MCU执行一条命令所需要的事件,一般一个指令周期含有1~4个机器周期8.“消影”——P0 = 0xff每次送完段选数据之后,在送入为选数据之前,需加上P0 = 0xff。
9 中断概念51内部有5个终端源,也就是说有5种情况发生,会使得单片机去处理终端程序。
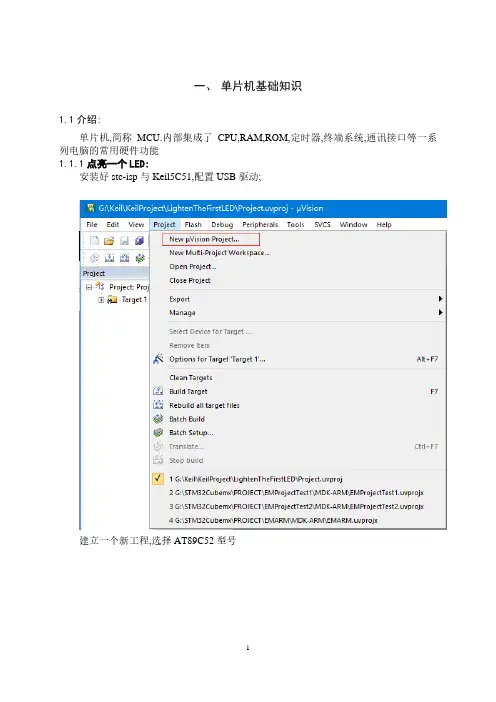
一、单片机基础知识1.1介绍:单片机,简称MCU.内部集成了CPU,RAM,ROM,定时器,终端系统,通讯接口等一系列电脑的常用硬件功能1.1.1点亮一个LED:安装好stc-isp与Keil5C51,配置USB驱动;建立一个新工程,选择AT89C52型号添加新文件选择C语言(通常情况下)通过调节P20的电压实现点亮/熄灭写好程序勾选创建HEX文件,再次编译;配置芯片型号(带RC选RC)与串口点击打开程序文件打开HEX文件下载到单片机;查找时重启单片机电源;成功点亮1.1.2LED闪烁:可从此处进行延时函数复制(系统频率一般默认为12Hz)#include<REGX52.H>//The Definition#include<INTRINS.H>//Using the _nop_()void Delay500ms() //@12.000MHz{unsigned char i, j, k;_nop_();i = 4;j = 205;k = 187;do{do{while (--k);} while (--j);} while (--i);}void main(){while(1){P2 = 0xFE;//1111 1110 There is a pressure drop across the diode Delay500ms();P2 = 0xFF;//1111 1111 There isn't a pressure drop across the diode Delay500ms();}}使用此函数进行LED闪烁;1.1.3LED流水灯:通过控制P2管脚的十六进制数值改变对应LED灯的压降,实现亮/灭;P2实际上为8位一体的导线;P2_X则可以操作单独的LED控件#include<REGX52.H>//The Definition#include<INTRINS.H>//Using the _nop_()void Delay1ms(unsigned int xms) //@12.000MHz{unsigned char i, j;while(xms){i = 2;j = 239;do{while (--j);} while (--i);xms--;}}void main(){while(1){P2=0xFE;//1111 1110 D1Delay1ms(500);P2=0xFD;//1111 1101 D2Delay1ms(500);P2=0xFB;//1111 1011 D3Delay1ms(500);P2=0xF7;//1111 0111 D4Delay1ms(500);P2=0xEF;//1110 1111 D5Delay1ms(500);P2=0xDF;//1101 1111 D6Delay1ms(500);P2=0xBF;//1011 1111 D7Delay1ms(500);P2=0x7F;//0111 1111 D8Delay1ms(500);}}1.2独立按键控制LED亮灭:通过查询原理图发现,K1独立按键对应P3_1;#include<REGX52.H>//The Definitionvoid main(){while(1){if(P3_1){//UPP2_0=1;//D1 Dark}else{//DOWNP2_0=0;//D1 Light}}}1.2.1独立按键控制LED状态:按键抖动:对于机械开关,当机械触点断开,闭合时,由于机械触点的弹性作用,一个开关在闭合时不会马上稳定地接通,在断开时也不会立刻断开,开关闭合/断开时往往伴随着波动#include<INTRINS.H>//Using the _nop_()void Delay(unsigned int xms){unsigned char i, j;while(xms){i = 2;j = 239;do{while (--j);} while (--i);xms--;}}void main(){while(1){if(!P3_1){//DOWNDelay(20);while(!P3_1);Delay(20);P2_0=~P2_0;}}}消除误差1.2.2独立按键控制LED显示二进制unsigned char 用来表示一个寄存器#include<REGX52.H>//The Definition#include<INTRINS.H>//Using the _nop_() void Delay(unsigned int xms){unsigned char i, j;while(xms){i = 2;j = 239;do{while (--j);} while (--i);xms--;}}void main(){unsigned char LEDNumber = 0;while(1){if(!P3_1){//DOWNDelay(20);while(!P3_1);Delay(20);LEDNumber++;P2=~LEDNumber;}}}对P2进行取反操作则为计算二进制数值1.2.3独立按键控制LED移位:#include<REGX52.H>//The Definition#include<INTRINS.H>//Using the _nop_() void Delay(unsigned int xms){unsigned char i, j;while(xms){i = 2;j = 239;do{while (--j);} while (--i);xms--;}}void main(){unsigned char LEDNumber=0;P2=~0x01;//Rename the character while(1){if(!P3_0){//K2 DOWN Moving RightDelay(20);while(!P3_0);Delay(20);LEDNumber++;if(LEDNumber>=8){LEDNumber=0;}P2=~(0x01<<LEDNumber);}if(!P3_1){//K1 DOWN Moving LeftDelay(20);while(!P3_1);Delay(20);if(!LEDNumber){LEDNumber=7;}else{LEDNumber--;}P2=~(0x01<<LEDNumber);}}}包括左移(K1)和右移(K2);if语句中为消除误差+移动计算;通过改变P2总导线压降,来控制对应LED灯的亮灭首先对P2进行初始化0000 0001 D1亮0x01<<00000 0010 D2 亮0x00<<1....1000 0000 D8亮0x00<<81.3静态数码管显示:确定静态数码管显示时,先根据所选型号与待输出数据确定位选(3.8引脚的高低电平)与段码(剩下引脚的高低电平)通过此两排端口进行控制,下方端口由P0控制通过138译码器实现仅一位LED为1的操作(其余为0),通过观察真值表确定端口: 三端口为P2引脚.C B A Y0 0 0 70 0 1 60 1 0 50 1 1 41 0 0 31 0 1 21 1 0 11 1 1 0DIR控制数据传输方向DIR通过J24控制电平高低.当DIR接高电平时,从左向右传输数据#include<REGX52.H>//The Definition#include<INTRINS.H>//Using the _nop_()void Delay(unsigned int xms){unsigned char i, j;while(xms){i = 2;j = 239;do{while (--j);} while (--i);xms--;}}unsigned char NixieTabel[]={0x3F,0x30,0x5B,0x4F,0x66,0x6D,0x7D,0x07};void Nixie(unsigned char Location, Number){ switch(Location){case8:{P2_4=0;P2_3=0;P2_2=0;break;}case7:{P2_4=0;P2_3=0;P2_2=1;break;}case6:{P2_4=0;P2_3=1;P2_2=0;break;}case5:{P2_4=0;P2_3=1;P2_2=1;break;}case4:{P2_4=1;P2_3=0;P2_2=0;break;}case3:{P2_4=1;P2_3=0;P2_2=1;break;}case2:{P2_4=1;P2_3=1;P2_2=0;break;}case1:{P2_4=1;P2_3=1;P2_2=1;break;}}P0=NixieTabel[Number];}void main(){unsigned int location = 1, number = 0;while(1){if(location > 8){location = 1;number = 0;}Delay(1000);Nixie(location,number);location++;number++;}}1.3.1动态数码管显示在实现显示多个数据时,清零上一个数据,实现消影#include<REGX52.H>//The Definition#include<INTRINS.H>//Using the _nop_()void Delay(unsigned int xms){unsigned char i, j;while(xms){i = 2;j = 239;do{while (--j);} while (--i);xms--;}}unsigned char NixieTabel[]={0x3F,0x30,0x5B,0x4F,0x66,0x6D,0x7D,0x07};void Nixie(unsigned char Location, Number){switch(Location){case8:{P2_4=0;P2_3=0;P2_2=0;break;}case7:{P2_4=0;P2_3=0;P2_2=1;break;}case6:{P2_4=0;P2_3=1;P2_2=0;break;}case5:{P2_4=0;P2_3=1;P2_2=1;break;}case4:{P2_4=1;P2_3=0;P2_2=0;break;}case3:{P2_4=1;P2_3=0;P2_2=1;break;}case2:{P2_4=1;P2_3=1;P2_2=0;break;}case1:{P2_4=1;P2_3=1;P2_2=1;break;}}P0=NixieTabel[Number];Delay(1);P0=0x00;//Creat Last digit.}void main(){while(1){Nixie(1,5);Nixie(2,2);Nixie(3,0);}}1.3.2LCD1602调试工具LCD_Init();//初始化LCD_ShowChar(1,1,'A');//显示一个字符LCD_ShowString(1,3,"Hello");//显示字符串LCD_ShowNum(1,9,123,3);//显示十进制数字LCD_ShowSignedNum(1,13,-66,2);//显示有符号十进制数字LCD_ShowHexNum(2,1,0xA8,2);//显示十六进制数字LCD_ShowBinNum(2,4,0xAA,8);//显示二进制数字1.4矩阵键盘:矩阵按键按列扫描P引脚均为弱上拉,即同时输入1&&0,输出0添加如下文件:#include <REGX52.H>#include "Delay.h"unsigned char MatrixKey(){unsigned char KeyNumber=0;//先判断列数,再判断行数,避免电平错位P1=0xFF;//全部置为高电平P1_3=0;//仅启动P1_3--即第一列 if(!P1_7){Delay(20);while(!P1_7);Delay(20);KeyNumber=1;}if(!P1_6){Delay(20);while(!P1_6);Delay(20);KeyNumber=5;}if(!P1_5){Delay(20);while(!P1_5);Delay(20);KeyNumber=9;}if(!P1_4){Delay(20);while(!P1_4);Delay(20);KeyNumber=13;}P1=0xFF;//全部置为高电平P1_2=0;//仅启动P1_2--即第二列 if(!P1_7){Delay(20);while(!P1_7);Delay(20);KeyNumber=2;}if(!P1_6){Delay(20);while(!P1_6);Delay(20);KeyNumber=6;}if(!P1_5){Delay(20);while(!P1_5);Delay(20);KeyNumber=10;}if(!P1_4){Delay(20);while(!P1_4);Delay(20);KeyNumber=14;}P1=0xFF;//全部置为高电平P1_1=0;//仅启动P1_1--即第三列 if(!P1_7){Delay(20);while(!P1_7);Delay(20);KeyNumber=3;}if(!P1_6){Delay(20);while(!P1_6);Delay(20);KeyNumber=7;}if(!P1_5){Delay(20);while(!P1_5);Delay(20);KeyNumber=11;}if(!P1_4){Delay(20);while(!P1_4);Delay(20);KeyNumber=15;}P1=0xFF;//全部置为高电平P1_0=0;//仅启动P1_0--即第四列if(!P1_7){Delay(20);while(!P1_7);Delay(20);KeyNumber=4;}if(!P1_6){Delay(20);while(!P1_6);Delay(20);KeyNumber=8;}if(!P1_5){Delay(20);while(!P1_5);Delay(20);KeyNumber=12;}if(!P1_4){Delay(20);while(!P1_4);Delay(20);KeyNumber=16;}return KeyNumber;}1.4.1矩阵键盘密码锁main函数:#include <REGX52.H>#include "Delay.h"#include "LCD1602.h"#include "MatrixKey.h"unsigned int KeyNumber;unsigned int PassWord,Count;//密码,位数void main(){LCD_Init();LCD_ShowString(1,1,"PassWord:");while(1){KeyNumber=MatrixKey();if(KeyNumber){if(KeyNumber<=10){//将10变成0,仅考虑0~9范围内if(Count<4){PassWord*=10;//每输入一位密码,当前密码左移一位 PassWord+=KeyNumber%10;//获取一位密码Count++;//计次}LCD_ShowNum(2,1,PassWord,4);//输出密码}if(KeyNumber==11){//清零Count=0;//清零次数PassWord=0;//清零密码LCD_ShowNum(2,1,PassWord,4);//更新显示}if(KeyNumber==12){//确认LCD_ShowString(1,12," ");if(PassWord==1976){LCD_ShowString(1,12,"OK");}else{LCD_ShowString(1,12,"ERROR");}//清零Count=0;PassWord=0;LCD_ShowNum(2,1,PassWord,4);//更新显示}}}}1.5定时器1.5.1按键控制LED流水灯模式TMOD:定时器寄存器:配置M1,M2为1 0-更改为16定时器模式0~65535:溢出时才进行中断判断每隔1us计数加一,总共定时时间65535us;赋初值64535-1000us(1ms)后计数器溢出,进行中断操作快捷生成定时器模块该函数未配置中断与中断优先级,且定时器时钟模式不需要定义定时器函数://1ms定时器void Timer0_Init(){//模式寄存器,高四位为计时器1,低四位为计时器2//高四位不变,低四位清零:10101100&11110000=10100000TMOD&=0xF0;//高四位不变,低四位赋1:10101100|00000001=10100001TMOD|=0x01;//控制寄存器;能单独对部分赋值TF0=0;//中断标志TR0=1;//运行控制位;1时运行T0进行计数//给定时器赋初值TH0=0xFC;//64535高八位TL0=0x18;//64535低八位//配置中断ET0=1;EA=1;//优先级选取PT0=0;}中断函数://定时器中断函数void Timer0_Rountine() interrupt 1{static unsigned int T0Count;//计数//复位TH0=0xFC;//64535高八位TL0=0x18;//64535低八位T0Count++;//每中断一次计数加一if(T0Count>=1000){//1ms中断一次,中断1000次则为1s //具体操作T0Count=0;P2_0=~P2_0;//闪烁}}主函数:#include <REGX52.H>#include <INTRINS.H>#include "Timer0.h"#include "Key.h"unsigned char KeyNumber,LEDMode;void main(){P2=0xFE;//点亮D1,给予循环移位初值Timer0_Init();//启用定时器while(1){KeyNumber=Key();if(KeyNumber){//按下独立按键if(KeyNumber==1){//S1为模式改变按键LEDMode++;if(LEDMode>=2){//仅有0|1两种模式LEDMode=0;}}}}}//中断操作void Timer0_Rountine() interrupt 1{ static unsigned int T0Count;//计数//给定时器赋初值复位TH0=0xFC;//64535高八位TL0=0x18;//64535低八位T0Count++;//每中断一次计数加一if(T0Count>=500){//0.5s操作一次T0Count=0;if(LEDMode){//模式1P2=_cror_(P2,1);//右移一位}else{//模式0P2=_crol_(P2,1);//左移一位}}}1.5.2定时器时钟:#include <REGX52.H>#include <INTRINS.H>#include "Timer0.h"#include "LCD1602.h"unsigned char Second,Minute,Hour;void main(){LCD_Init();//显示屏初始化LCD_ShowString(1,1,"Clock:");Timer0_Init();//启用定时器while(1){LCD_ShowNum(2,1,Hour,2);LCD_ShowString(2,3,":");LCD_ShowNum(2,4,Minute,2);LCD_ShowString(2,6,":");LCD_ShowNum(2,7,Second,2);}}//中断操作void Timer0_Rountine() interrupt 1{static unsigned int T0Count;//计数//给定时器赋初值复位TH0=0xFC;//64535高八位TL0=0x18;//64535低八位T0Count++;//每中断一次计数加一if(T0Count>=1000){//0.5s操作一次T0Count=0;Second++;if(Second==60){Minute++;Second=0;if(Minute==60){Hour++;Minute=0;if(Hour==25){Hour=Minute=Second=0;}}}}}1.6串口:1.6.1串口通信:配置波特率:1.6.2交互数据传输:#include <REGX52.H>//串口函数******************void UART_Init(){//配置串行控制寄存器,调整工作模式1SCON=0x50;//允许双向传输,REN置为1,配置使能//配置波特率选择位--需要配置定时器PCON|=0x80;//最高位置1,波特率加倍//定时器模式寄存器式//使用双八位模式(复位与计数分开)提高精度//清除定时器1模式位TMOD&=0x0F;//设定定时器1为八位自动重装方式TMOD|=0x20;//256溢出一次TL1=0xF4;//设定定时器初值TH1=0xF4;//设定定时器重装值ET1=0;//禁止定时器1中断TR1=1;//启动定时器1//使能中断EA=1;ES=1;}//发送函数void UART_SendByte(unsigned char Byte){SBUF=Byte;//发送数据到SBUF缓存器中即可进行传输//检测是否完成while(!TI);TI=0;}#ifndef __UART_H__#define __UART_H__/*串口函数输入:void输出:void功能:实现串口使用的初始化*/void UART_Init();/*串口发送函数输入:void输出:void功能:通过串口发送数据至接收端*/void UART_SendByte(unsigned char Byte);#endifmain:#include <REGX52.H>#include "Delay.h"#include "UART.h"void main(){UART_Init();while(1){}}//使能中断函数;发送/接收中断函数void UART_Routine() interrupt 4{if(RI==1){//限制仅为接收中断才进行后续操作P2=~SBUF;//外部设备传输数据存放在SBUF缓存器内 UART_SendByte(SBUF);//输出传入数据RI=0;}}1.7LED点阵屏:通过74HC595三个引脚控制八个LED 显示(新版板子是没有该八位LED 的)通过控制75HC595进行数据传输: #include <REGX52.H>//重新进行声明sbit RCK = P 3^5; //RCLKsbit SCK = P 3^6; //SRCLKsbit SER = P 3^4;//移位寄存器输入数据void _74HC595_WriteByte(unsigned char Byte){unsigned char i;for(i=0;i<8;i++){//从高位开始缓存数据SER=Byte&(0x80>>i);//非零置一0x80--10000000SCK=1;//赋予高电平进行移位SCK=0;//复位}RCK=1;//传输数据RCK=0;//复位}void main(){//初始化SCK=0;RCK=0;_74HC595_WriteByte(0xF0);while(1){}}1.7.1LED点阵屏显示动画:使用该软件进行数据读取MatrixLED_ShowColumn.c:#include <REGX52.H>#include "Delay.h"#include "MatrixLED_ShowColumn.h"//移位寄存器输入数据,控制段选void _74HC595_WriteByte(unsigned char Byte){unsigned char i;for(i=0;i<8;i++){//从高位开始缓存数据SER=Byte&(0x80>>i);//非零置一0x80--10000000SCK=1;//赋予高电平进行移位SCK=0;//复位}RCK=1;//传输数据RCK=0;//复位}//LED点阵屏void MatrixLED_ShowColumn(unsigned char Column,unsigned char Data){ _74HC595_WriteByte(Data);//段选MATRIX_LED_PORT=~(0x80>>Column);//位选0时出现压降,导通Delay(1);MATRIX_LED_PORT=0xFF;//位清零}//初始化void MatrixLED_Init(){SCK=0;RCK=0;}MatrixLED_ShowColumn.h:#ifndef _MATRIXLED_H__#define _MATRIXLED_H__//重新进行声明sbit RCK= P3^5;//RCLKsbit SCK= P3^6;//SRCLKsbit SER= P3^4;#define MATRIX_LED_PORT P0/*移位寄存器函数输入:Byte-点阵屏行数据输出:void功能:通过输入数据对LED点阵屏行(即位选)进行调整范围:0~7*/void _74HC595_WriteByte(unsigned char Byte);/*LED点阵屏函数输入:Column-位选 Data-段选输出:void功能:通过输入位选与段选实现LED点阵屏的动画演示*/void MatrixLED_ShowColumn(unsigned char Column,unsigned char Data);/*LED点阵屏初始化函数输入:void输出:void功能:对LED相关参数进行初始化*/void MatrixLED_Init();#endifmain.c:#include <REGX52.H>#include "Delay.h"#include "MatrixLED_ShowColumn.h"unsigned char code Animation[]={//存放在flash内存中,避免占用RAM内存0x00,0x40,0x20,0x1F,0x20,0x40,0x00,0x00,0x00,0x40,0x40,0x7F,0x40,0x40,0x00,0x00,0x00,0x7E,0x02,0x02,0x02,0x02,0x00,0x00,0x00,0x00,0x76,0x91,0x89,0x6E,0x00,0x00,0x00,0x00,0x7F,0x88,0x88,0x70,0x00,0x00,};void main(){//只要是局部变量的定义都要放在所在函数体内的第一行unsigned char j,Offset,Count;MatrixLED_Init();while(1){for(j=0;j<8;j++){MatrixLED_ShowColumn(j,Animation[j+Offset]);}Count++;if(Count>10){//扫描十遍偏移一次Count=0;Offset+=8;Delay(200);if(Offset>32){//防止溢出Offset=0;}}}}1.8DS1032定时时钟:从上到下依次存储不同的时间左边两列为其地址命令字第六位:1-RAM;0-CK,对时钟进行操作(有横线代表低电平有效)仅改变前七位,最后一位恒为1前一个字节是命令字,后一个是数据重新定义该三个端口1.8.1DS1302固定时钟主函数:#include <REGX52.H>#include "Delay.h"#include "DS1302.h"#include "LCD1602.h"void main(){LCD_Init();DS1302_Init();LCD_ShowString(1,1," - - ");LCD_ShowString(2,1," : : ");DS1302_SetTime();//设置时间//DS1302芯片内部自动会进行时间进位,不需要手动设置,只需要输入初始时间即可while(1){DS1302_ReadTime();//读入时间LCD_ShowNum(1,1,DS1302_Time[0],2);LCD_ShowNum(1,4,DS1302_Time[1],2);LCD_ShowNum(1,7,DS1302_Time[2],2);LCD_ShowNum(2,1,DS1302_Time[3],2);LCD_ShowNum(2,4,DS1302_Time[4],2);LCD_ShowNum(2,7,DS1302_Time[5],2);}}DS1302.c:#include <REGX52.H>#include "Delay.h"//重新定义端口名称,便于模块化集成sbit DS1302_SCLK=P3^6;sbit DS1302_IO=P3^4;sbit DS1302_CE=P3^5;#define DS1302_SECOND 0x80#define DS1302_MINUTE 0x82#define DS1302_HOUR 0x84#define DS1302_DATE 0x86#define DS1302_MONTH 0x88#define DS1302_DAY 0x8A#define DS1302_YEAR 0x8C#define DS1302_WP 0x8E//Year,Month,Day,Hour,Minute,Second,Weekdayunsigned char DS1302_Time[]={22,5,22,21,19,55,7};//DS1302初始化,将使能端置0,SCLK置0void DS1302_Init(void){DS1302_CE=0;DS1302_SCLK=0;}//写入操作void DS1302_WriteByte(unsigned char Command, unsigned char Data){ //写入预操作//Command的第零位赋予IO口,第零位是标志位,判断读/写//Command与Data都是通过上升沿进行判断,因此总共有16个脉冲unsigned char i;DS1302_CE=1;//进行Command判断for(i=0;i<8;i++){DS1302_IO=Command&(0x01<<i);//进行电平变化,产生上升沿与下降沿DS1302_SCLK=1;Delay(1);//一般需要增加延时,具体参考芯片手册DS1302_SCLK=0;}//进行数据写入for(i=0;i<8;i++){DS1302_IO=Data&(0x01<<i);DS1302_SCLK=1;Delay(1);DS1302_SCLK=0;}//写入末操作DS1302_CE=0;}unsigned char DS1302_ReadByte(unsigned char Command){//读入预操作unsigned char i;unsigned char Data=0x00;Command|=0x01;//此处将最低位,置成1,使输入的写Command变成读Command DS1302_CE=1;//读入的Command是上升沿,而Data是下降沿,因此总共有15个脉冲for(i=0;i<8;i++){DS1302_IO=Command&(0x01<<i);//调整位置确保脉冲与Data一致DS1302_SCLK=0;DS1302_SCLK=1;}//读入数据//IO口默认为0,因此输入的数据为1时,for(i=0;i<8;i++){DS1302_SCLK=1;DS1302_SCLK=0;if(DS1302_IO){Data|=(0x01<<i);}}//读入末操作DS1302_CE=0;DS1302_IO=0;return Data;}unsigned char ChangeToDec(unsigned char Number){return (Number/16*10+Number%16);}。
51单片机知识总结51单片机是一种常见的微控制器,广泛应用于各种嵌入式系统。
以下是关于51单片机的知识总结:1. 概述:51单片机是指基于Intel的8051微控制器核的微控制器。
它具有40个引脚,采用CHMOS工艺,功耗低,可靠性强。
51单片机内部集成了数据存储器、程序存储器、定时器/计数器、串行通信接口等模块。
2. 结构特点:一个8位处理器。
具有布尔处理能力和位处理功能。
4k字节的ROM/EPROM,可进行在线编程和擦除。
256字节的RAM。
外部总线接口。
时钟和定时器模块。
3. 应用领域:工业自动化控制。
智能仪表和传感器接口。
家电控制(如空调、冰箱、洗衣机等)。
通信设备(如调制解调器、路由器等)。
汽车电子(如发动机控制、安全系统等)。
4. 开发环境:常用的51单片机开发环境有Keil、IAR Embedded Workbench等,这些开发环境支持C/C++语言编程,方便用户进行程序开发和调试。
5. 编程语言:常用的编程语言有汇编语言和C语言。
汇编语言是一种低级语言,可以直接控制硬件,但代码量大且可读性差;C语言则是一种高级语言,代码量小且易于读懂和维护,但在编程时需要了解一些硬件相关的知识。
6. 开发流程:系统需求分析:明确系统的功能需求和控制要求。
硬件电路设计:根据需求选择合适的单片机型号和外设器件,设计电路原理图和PCB板。
软件编程:使用开发环境编写程序代码,进行仿真和调试。
系统集成与测试:将硬件和软件集成在一起,进行系统测试和功能验证。
7. 注意事项:在应用51单片机时,需要注意单片机的电源电压范围、时钟频率选择、I/O口的使用和配置等问题,同时还要注意避免电磁干扰和过流过压等问题。
8. 未来发展:随着技术的发展,51单片机逐渐面临被淘汰的命运,但其在嵌入式系统中的地位仍然非常重要。
未来,随着物联网技术的发展,51单片机有望在智能家居、智能农业等领域得到更广泛的应用。
同时,随着技术的进步,51单片机的性能和功能也将得到进一步提升和完善。
51单片机知识基础51单片机是一种非常常见的嵌入式系统开发平台,广泛应用于各个领域,如工业控制、智能家居、物联网等。
要想在嵌入式系统开发中熟练运用51单片机,我们首先需要了解它的基础知识。
本文将从51单片机的概念、特点、原理、编程语言等方面展开论述,以帮助读者全面掌握51单片机的基础知识。
第一部分:51单片机概述51单片机是指Intel公司研发的一种8位单片微控制器,意为“Intel 80系列单片机”。
它由CPU、内存、输入输出端口、定时器、串口等组成,具有较强的数据处理和控制能力。
作为一种非常成熟的单片机,51单片机以其稳定性、成本低、易于使用等特点,受到了广大嵌入式系统开发者的青睐。
第二部分:51单片机特点1. 8位架构:51单片机采用8位架构,即其CPU的位数为8位。
这使得51单片机非常适合于一些对计算能力要求不高的控制应用。
2. 强大的IO口:51单片机内置了大量的IO口,可以方便地与其他设备进行通信,实现各种输入输出功能。
此外,51单片机还支持中断功能,可以提高系统的响应速度。
3. 丰富的外设:51单片机内部集成了多个定时器、串口等外设,可用于实现各种功能,如定时、计数、通信等。
4. 低功耗设计:51单片机在设计时考虑到了功耗的问题,采取了一系列的低功耗技术,可以大大降低系统的能耗。
5. 软件支持:针对51单片机,有丰富的软件开发工具和开发库可供选择,如Keil C51、SDCC等,大大降低了开发的难度。
第三部分:51单片机工作原理51单片机的工作原理主要包括指令执行周期、数据通信、中断机制等。
1. 指令执行周期:51单片机通过时钟控制来执行指令。
每个指令执行周期由若干个机器周期组成,一个机器周期通常为12个时钟周期。
2. 数据通信:51单片机通过内部总线进行数据通信。
在执行指令时,需要从内存或寄存器中读取数据,对数据进行处理,并将处理结果写回内存或寄存器。
3. 中断机制:51单片机支持中断机制,可以在特定条件下触发中断请求,从而暂停当前的程序执行,转而执行中断服务程序。
51单片机知识点单片机(Microcontroller,简称MCU)是指集成了微处理器、存储器和各种输入输出接口功能于一体的芯片。
作为嵌入式系统的核心,单片机被广泛应用于各个领域,具有重要的意义。
本文将介绍51单片机的一些基础知识点。
一、51单片机概述51单片机是由Intel公司推出的一种8位单片机,采用Harvard结构,具有较高的性价比和广泛的应用。
它的内部包含了CPU、RAM、ROM、I/O接口等重要组成部分,同时支持多种外设接口,具备较强的可扩展性。
二、51单片机的特点1. 8位架构:51单片机采用的是8位的数据总线和内部寄存器,可以处理8位数据,适用于许多小型应用。
2. 存储器:51单片机内部包含了存储器单元,其中包括RAM和ROM。
RAM用于存储数据和临时变量,ROM用于存储程序代码。
3. I/O接口:51单片机提供了丰富的I/O接口,可以与各种外设进行通信和数据交换。
4. 定时器和计数器:51单片机内部集成了定时器和计数器,可用于计时、调度和产生精确的时间延迟。
5. 中断系统:51单片机支持中断功能,可以及时响应外部触发的事件,提高了系统的实时性和可靠性。
6. 低功耗设计:51单片机在设计上考虑了功耗优化,具有较低的工作电流和待机电流,适用于电池供电和节能应用。
三、51单片机的编程语言51单片机的编程语言主要有汇编语言和C语言两种。
汇编语言是直接操作单片机硬件的底层语言,具有高效性和灵活性,但难以学习和维护。
C语言是一种高级语言,可以通过编译器将C语言代码转换为单片机可执行的机器语言,更容易编写和调试。
四、51单片机的应用领域51单片机广泛应用于各个领域,如家电控制、电子仪器、通信设备、汽车电子、工业自动化等。
它具有价格低廉、易于使用、可靠性高等优点,在小型控制系统中得到了广泛应用。
五、51单片机的开发工具51单片机的开发工具主要包括开发板、编译器、调试器等。
开发板是一个硬件平台,提供了丰富的接口和外设,用于连接和测试电路。
MCS-51单片机的基本结构XTAL1XTAL2VCC VSSMCS-51单片机的基本结构:1、微处理器CPU :为8位的CPU ,且内含一个1位CPU (布尔处理器),不仅可以处理字节数据,还可以进行位变量的处理。
2、内部数据存储器(RAM ):128字节片内RAM 。
(8052系列为256字节)3、内部程序存储器(ROM/EPROM/):8031无此器件,8051为4KROM ,8751为4KEPROM 。
4、定时器/计数器:内含2个16位定时/计数器,具有四种工作方式。
5、串行口:1个全双工的串行口,具有四种工作方式。
6、中断控制系统:具有5个中断源,2级中断优先权。
7、P0、P1、P2、P3:为4个并行8位I/O 口。
8、特殊功能寄存器(SFR ):共有21个,用于对片内各功能模块进行管理、控制、监视。
实际上是一些控制寄存器和状态寄存器,是一个特殊功能的RAM 区。
12346758910111213144039383735343633323130292827P1.0P1.1P1.4P1.3P1.2P1.5RST/VPD P1.7P1.6RXD P3.0TXD P3.1T0 P3.4T1 P3.5Vcc P0.0P0.3P0.2P0.1P0.4P0.6P0.5P0.7P2.7PSEN P2.6EA/VPP ALE/PROG 151617181920WR P3.6RD P3.7XTAL1XTAL2VSS262524232121P2.5P2.1P2.2P2.0P2.4P2.3INTO P3.2INT1 P3.389C511、电源、时钟电路VCC(40脚)—+5V电源VSS(20脚)—地XTAL1(19脚)—芯片内部振荡电路(单级反相放大器)输入端。
XTAL2(18脚)—芯片内部振荡电路(单级反相放大器)输出端。
MCS-51的时钟可由内部方式或外部方式产生。
1)内时钟方式利用芯片内部的振荡电路,在XTAL1、XTAL2的引脚上外接定时元件,内部振荡器便能产生自激振荡,用示波器便可以观察到XTAL2输入的正弦波,定时元件可以采用石英晶体和电容组成的并联谐振电路,连接方法如图2.2(a)所示。
51单片机基础知识51单片机是一种广泛应用于嵌入式系统中的微控制器,它具有体积小、功耗低、易于编程等优点,因此在各种电子设备中得到了广泛的应用。
在学习51单片机之前,我们需要掌握一些基础知识。
我们需要了解51单片机的基本结构。
51单片机由CPU、存储器、输入输出端口、定时器、串口等组成。
其中,CPU是单片机的核心部件,它负责执行程序指令;存储器用于存储程序和数据;输入输出端口用于与外部设备进行数据交互;定时器用于计时和延时;串口用于与其他设备进行通信。
我们需要了解51单片机的编程语言。
51单片机支持多种编程语言,如汇编语言、C语言等。
汇编语言是一种低级语言,它直接操作CPU指令,具有高效性和灵活性,但编写难度较大。
C语言是一种高级语言,它具有易于学习、编写简单等优点,但执行效率较低。
我们还需要了解51单片机的编程工具。
51单片机的编程工具主要有Keil、IAR等。
Keil是一种常用的集成开发环境,它具有编译、调试、下载等功能,可以方便地进行单片机程序开发。
IAR也是一种常用的开发工具,它具有高效的编译器和调试器,可以提高程序的执行效率。
我们需要了解51单片机的应用领域。
51单片机广泛应用于各种电子设备中,如家电、汽车电子、医疗设备等。
在家电中,51单片机可以控制电器的开关、温度、湿度等参数;在汽车电子中,51单片机可以控制车载音响、空调、车灯等设备;在医疗设备中,51单片机可以控制医疗仪器的运行和数据采集等。
学习51单片机需要掌握基本结构、编程语言、编程工具和应用领域等基础知识。
只有掌握了这些知识,才能更好地进行单片机程序开发和应用。
51单片机基本知识汇总
51单片机是一种常见的微控制器,广泛应用于各种电子设备中。
本文将对51单片机的基本知识进行汇总,包括其特点、应用领域、工作原理以及相关开发工具等内容。
一、51单片机的特点
51单片机是一种8位微控制器,具有体积小、功耗低、价格便宜等特点。
它采用哈佛结构,具有较好的实时性能和嵌入式系统特性。
此外,51单片机还具备较强的扩展性,可通过外部器件和接口扩展其功能。
二、51单片机的应用领域
由于其成本低、易学易用的特点,51单片机在各种电子设备中被广泛应用。
比如家用电器、汽车电子、工控设备、通信设备等领域。
在家用电器中,51单片机可以用于控制空调、洗衣机、电视等设备的运行;在汽车电子方面,它可以用于控制车载音响、车灯等;在工控设备中,51单片机可用于控制机械手臂、传感器等;在通信设备方面,它可以用于控制无线路由器、手机等。
三、51单片机的工作原理
51单片机的工作原理可以简单概括为:通过外部输入设备(如按键、传感器)获取输入信号,经过A/D转换后输入到单片机内部;单片机根据预先设定的程序进行运算、判断和控制,然后通过输出端口
控制外部输出设备(如LED灯、电机)工作。
整个过程是通过时钟信号进行同步控制的。
四、51单片机的开发工具
为了方便开发人员进行程序设计和调试,51单片机有一系列的开发工具可供选择。
常用的开发工具有Keil C51、Proteus、IAR等。
Keil C51是一种集成开发环境,提供了编译、调试、仿真等功能,可以方便地编写和调试51单片机的程序。
Proteus是一种虚拟电子电路设计与仿真软件,可用于模拟51单片机的工作过程。
IAR是一种集成开发环境,也是一种常用的编译器,适用于多种单片机开发。
总结:
本文对51单片机的基本知识进行了汇总,包括其特点、应用领域、工作原理以及相关开发工具等内容。
51单片机作为一种常见的微控制器,具有广泛的应用前景。
掌握了51单片机的基本知识,可以更好地应用于各种电子设备的开发与控制。
希望本文能为读者了解51单片机提供一些参考,并对其感兴趣的读者提供一些启示。