《航空无线电导航技术》习题..
- 格式:doc
- 大小:67.50 KB
- 文档页数:13
第一章测试1.导航飞行就是遵循事先的安排,引导飞机从一个位置到另一个位置的控制过程。
()A:错B:对答案:B2.航路导航目前使用较多的是仪表着陆系统ILS导航系统。
()A:对B:错答案:B3.航向的测量以正北为基准开始顺时针方向旋转到飞机纵轴方向的夹角。
()A:对B:错答案:A4.空速是指飞机在地面的投影点移动速度,地速是飞机相对于地面的水平运动速度。
()A:错B:对答案:A5.测向系统自动定向机的位置线是直线。
()A:错B:对答案:B6.根据实现导航的方法和原理不同,飞机导航可使用的导航技术有()A:天文导航B:仪表导航C:无线电导航D:目视导航答案:ABCD7.无线电导航的缺点是()A:精度高B:不受时间限制C:设备简单、可靠D:无线电波容易受到干扰答案:D8.测向系统的位置线是()。
A:直线B:圆形C:双曲线答案:A9.下面属于测距系统的()。
A:VORB:ILSC:DMED:ADF答案:C10.下面不能精准定位的系统是()A:一个DME,一个VOR系统B:两个VOR系统C:三个DME系统D:两个DME系统答案:D第二章测试1.自动定向机(ADF)也称无线电罗盘,是最早用于飞机导航的无线电设备。
()A:错B:对答案:B2.在现代飞机上,一般都装有两部自动定向机,通过测量距离地面两个导航台的方位角,可以确定飞机位置。
()A:对B:错答案:A3.航线导航台主要用于对飞机的航线引导,还可用两个导航台为飞机定位。
()A:错B:对答案:B4.双归航台是用于飞机着陆的导航台,它可引导飞机进场,完成机动飞行和保持着陆航向。
()A:对B:错答案:A5.飞行高度越低,离山的距离越近,山区效应也越小。
()A:错B:对答案:A6.ADF的功用是()。
A:测向C:测距D:选项都是答案:A7.ADF功用不包括()。
A:测量飞越电台时间B:测量斜距C:收听中波广播电台D:测量方位答案:B8.ADF天线是什么形式的?()A:两个垂直天线B:一个环形天线,一个垂直天线C:两个环形天线D:两个刀型天线答案:B9.关于山区效应的说法错误的是()A:山区效应中的反射效应对中长波影响较大B:飞行高度越低,离山距离越近,山区效应越小C:为避免和减小山区效应影响,可在干扰范围之外测定方位D:电波在传播过程中,遇到山峰会发生绕射和反射答案:B10.关于海岸效应的说法错误的是()。
一、判断是非题对的打√,错的打×(例题中都是正确的,实际会改变)1.惯性导航保密性强,是一种自备式导航。
2.惯性导航随着航行时间和航行距离的增长,位置累积误差越来越大,需要进行位置较准。
3.大多数组合导航系统以惯导系统为主,原因主要是惯导系统能够提供比较多的导航参数,还能提供全姿态信息参数,这是其它导航系统所不能比拟的。
(√)4.飞机的飞行目的地、航路上可用于改变航向、高度、速度等或向空中交通管制中心报告的明显位置,叫做航路点。
5.单值地定位,测得一个导航参量,即获得一条位置线(或一个位置面)是不够的,至少是两个(平面定位)或两个以上(空间定位);6.无线电导航的缺点是:它必须要辐射和接收无线电波,因而易被发现,易受自然和人为干扰,有些导航系统还需要配备必要的地面设备。
7.}8.现代民用飞机普遍使用以VOR/DME为基础的RNAV系统,即VOR/DMERNAV系统;9.测向系统的位置线是直线,如VOR、ADF等。
10.用测距系统(如DME)的圆位置线与测向系统(如VOR)的直线位置线相交的方法,可确定飞机的位置M,该定位法叫做ρ-θ定位系统,也称为极坐标定位。
11.实际应用中,利用同台安装的全向信标台和测距台即可实现ρ-θ定位;12.由飞机测定对两个地面导航台(如两个DME台)的距离,可获得两个圆位置线,其交点M为飞机位置;13.两个圆位置线有两个交点,出现定位双值;14.采用ρ-ρ-ρ定位系统,即用三个地面台,确定三个圆位置线,可确定飞机的唯一位置M。
15.由飞机测定对两个地面导航台(如两个VOR台)的方位,可获得两条直线位置线,其交点M即为飞机位置,采用该定位法的系统叫做θ-θ定位系统。
16.利用奥米伽导航系统(或罗兰系统)测得一组两个导航台的距离差,得到一组双曲线位置线,同时再测出另一组导航台的距离差,得到另一组双曲线位置线,用其交点确定飞机的位置,采用该定位法的系统叫做双曲线定位系统。
导航系统无线电导航基础知识 (4)1.位置线的定义和位置线是直线和圆的导航设备? (4)ADF系统 (4)1.ADF系统组成及它们的功用 (4)2.无测角器新型ADF的工作原理?ADF功用? (4)3.ADF在日落时分2000KH时指示不稳定,而在1350KH时会好一点,是什么原因? (4)4.ADF有哪几种定向误差,如果避免? (5)5.ADF罗差产生的原因及修正方法(P331) (5)VOR系统 (5)6.VOR定位的方法有几种,是什么方法 (5)7.WXR控制面板每个键的作用? (6)8.VOR可变相位30HZ和基准相位30HZ相位差和偏移的关系? (6)9.飞机在VOR台正西侧,画出可变30HZ信号与基准30HZ信号之间的相位关系图,并解释。
★ (6)10.飞机在VOR150度径向上方,预选航道为30度,航道偏离杆如何指示?是向台还是背台?P347611.VOR与ADF的共同点和不同点? (6)12.DDM的定义,怎样使偏离杆偏离?(P356) (6)ILS系统 (6)13.指点信标的组成、功能、频率 (6)14.指点信标系统在ILS系统中的作用。
(7)15.反向航道进近要注意什么? (7)16.简单叙述航向信标机载接收机的工作过程。
(7)17.简述APP和LOC的区别(无答案) (7)LRRA系统 (8)18.无线电高度表安装延迟电路工作原理,怎样消除安装延迟? (8)19.为什么等差频无线电高度表有鉴频器,而普通的没有? (8)20.无线电高度表测试时,有什么现象,在什么情况下自测试抑制 (8)21.在维护无线电高度表时,若更换的收/发电缆长度比原来的长,高度指示是多指或是少指,为什么?如果多了,标准是多少? (8)22.哪种无线电高度表有阶梯误差,产生的原因是什么? (8)23.等差频高度表与普通高度表的区别 (9)24.RA的测量范围、功能及用户 (9)25.200英尺跳闸电路(P380) (9)26.DH在什么情况下会在EADI上出现黄色闪烁符号?怎样能让它显示正常? (9)DME系统 (9)27.DME的工作有几个状态,每个状态的工作任务 (9)28.DME询问信号频率和特点? (10)29.7/15的原则,为什么要实行这个原则? (10)30.VOR、ILS、DME控制面板的功用和特点(为什么VOR,ILS,DME面板的控制都集成在1个导航面板)★ (10)WXR系统 (10)31.在地面检查WXR除WXR本身外还需要哪些机载系统正常工作?为什么? (10)32.WXR控制面板每个键的作用? (11)33.气象雷达的收发转换开关作用? (11)34.雷达发射信号的特点 (11)35.湍流和风切变的测量原理 (11)36.WXR天线的稳定性,为什么要稳定? (11)37.雷达天线的维护注意事项 (11)ATC系统 (12)38.ATC面板各个部分的功用(有图)★ (12)39.说明A、C模式应答机系统的功用。
飞机导航系统例题一、判断是非题对的打?,错的打×(例题中都是正确的,实际会改变)1. 惯性导航保密性强,是一种自备式导航。
2. 惯性导航随着航行时间和航行距离的增长,位置累积误差越来越大,需要进行位置较准。
3. 大多数组合导航系统以惯导系统为主,原因主要是惯导系统能够提供比较多的导航参数,还能提供全姿态信息参数,这是其它导航系统所不能比拟的。
(?) 4. 飞机的飞行目的地、航路上可用于改变航向、高度、速度等或向空中交通管制中心报告的明显位置,叫做航路点。
5. 单值地定位,测得一个导航参量,即获得一条位置线(或一个位置面)是不够的,至少是两个(平面定位)或两个以上(空间定位); 6. 无线电导航的缺点是:它必须要辐射和接收无线电波,因而易被发现,易受自然和人为干扰,有些导航系统还需要配备必要的地面设备。
7. 现代民用飞机普遍使用以VOR/DME为基础的RNAV系统,即VOR/DME RNAV系统;8. 测向系统的位置线是直线,如VOR、ADF等。
9. 用测距系统(如DME)的圆位置线与测向系统(如VOR)的直线位置线相交的方法,可确定飞机的位置M,该定位法叫做ρ-θ定位系统,也称为极坐标定位。
10. 实际应用中,利用同台安装的全向信标台和测距台即可实现ρ-θ定位;11. 由飞机测定对两个地面导航台(如两个DME台)的距离,可获得两个圆位置线,其交点M为飞机位置;12. 两个圆位置线有两个交点,出现定位双值;13. 采用ρ-ρ-ρ定位系统,即用三个地面台,确定三个圆位置线,可确定飞机的唯一位置M。
14. 由飞机测定对两个地面导航台(如两个VOR台)的方位,可获得两条直线位置线,其交点M即为飞机位置,采用该定位法的系统叫做θ-θ定位系统。
15. 利用奥米伽导航系统(或罗兰系统)测得一组两个导航台的距离差,得到一组双曲线位置线,同时再测出另一组导航台的距离差,得到另1一组双曲线位置线,用其交点确定飞机的位置,采用该定位法的系统叫做双曲线定位系统。
第一章绪论1.1.1导航与导航系统的基本概念1.导航导航的基本含义是引导运行体从一地到另一地安全航行的过程。
导航强调的是“身在何处,去向哪里”是对继续运动的指示。
导航之所以定义为一个过程,是因为它贯穿于运动体行动的始终,遍历各个阶段,直至确保运行达成目的。
应当说大部分运行体都是由人来操纵的,而对那些无人驾驶的的运行体来说,控制是由仪器或设备来完成的,这时的导航就成为了制导。
近年来人们将定位于导航并列提出。
事实上定位提供的位置参量是一个标量,只有将其与方向数据联合起来成为矢量,才能服务于运行体的航行。
因此定位与测角、测距一样是导航的技术之一,通过定位可以实现导航。
也可以说定位是静态用户要求的;但对动态用户而言要求的是导航。
2.导航系统导航系统是用于对运行体实施导航的专用设备组合或设备的统称。
导航系统是侧重于实现特定导航功能的设备组合体,组合体内的各部分必须按约定的协调方式工作才能实现系统功能,而导航设备一般是指导航系统中某一相对独立部分或产品,或实现某一导航功能的单机。
1.1.3 导航及无线电导航系统的分类导航是一门基于“声、光、电、磁、力”的综合性的应用科学,实现导航的技术手段很多,按其工作原理或主要应用技术可分为下述类别:(1)天文导航——利用观测自然天体(空中的星体)相对于运行体所在坐标系中的某些参量实现的导航称为天文导航。
(2)惯性导航——利用牛顿力学中的惯性原理及相应技术实现的导航称为惯性导航。
(3)无线电导航——利用无线电技术实现的导航称为无线电导航。
(4)地磁导航——利用地球磁场的特性和磁敏器件实现的导航称为地磁导航。
(5)红外线导航——利用红外线技术实现的导航称为红外线导航。
(6)激光导航——利用激光技术实现的导航称为激光导航。
(7)声纳导航——利用声波或超声波在水中的传播特性和水声技术实现的导航(用于对水下运行体的导航)称为声纳导航。
(8)地标或灯标导航——利用观测(借助光学仪器或目视)已知位置的地标或灯标实现的导航称为地标或灯标导航。
基础1、 单选:(85)1. 具有储存磁场能量这种电磁特性的元件为( )。
A.电阻B.电容C.电感D. 包括BC 两项答案:C2. 电流参考方向是人为设定的电流运动的正方向。
若电流的真实方向与参考方向一致,则电流为( )。
A.负值B.正值C.虚值D.可正可负答案:A3. 如图当电容器两端电压U 等于3V 时,电容器储集了61.510-⨯C 电量,则该电容器的电容为( )A.6210⨯ FB.2μFC.5μFD.5510p ⨯ F 答案:D4. 如图所示的电路中,当电阻值同时减小时,则( )。
A.I1 和 I2不变B.I1增大,I2变小C.I1增大,I2不变D.I1减小,I2增大答案:A5. 如图是含有节点A 的部分电路,电流表正负接线端“+”、“-”号标出。
今电流表指针正向偏转,示数10A 。
有关电流、电压正方向也表示在图中,则有( )。
A.I1=+10A ,U= -6VB.I1= -10A ,U=+6VC.I1=+10A ,U=+12VD.I1= -10A ,U=-12V答案:C6. 一段导线的电阻与其两端所加的电压之间( )。
A.一定有关B.一定无关C.可能有关D. 无法判断答案:B7. 在三相电路中,三相对称负载为星形连接,三相电流均为4A ,则中线的电流为( )。
A.4AB.12AC.8AD.0A答案:D8. 半导体材料是指( )等物质。
A.硼B.磷C.硅D.二氧化硅答案:C9. 二极管的主要作用是( )A.单向导电B.电流放大C.电压放大D.阻抗变换答案:A10. 在二极管伏安特性中,没有( )特性。
A.正向导通B.正向截止 A - AI 1 U 3Ω 10Ω 20V24V 6ΩC.反向击穿D.反向截止答案:B11.某三极管各电极电位为VE =0V、VB= 4V、VC=12V,由此可判断该三极管( )。
A.处于放大区域B.处于饱和区域C.处于截止区域D.已损坏答案:D12.在某放大电路中,测得三极管静态电位VBE =0.2V、VCE = 4V,则这只三极管为( )。
导航原理与系统习题第1章 无线电导航基本理论1. 无线电导航的任务是什么?其基本任务又是什么?2. 无线电为什么能用于导航(无线电导航的依据是什么)?3. 无线电导航主要存在哪几种定位方式?给出θ-θ、ρ-θ、ρ-ρ定位的示意图,并给出必要的解释。
4. 画出基本的无线电导航定位系统的实现框图,并给出解释。
5. 无线电导航台为什么必须辐射Morse 识别码?6. 无线电导航为什么不采用天波传播导航信息?7. 近程导航系统测距机(DME )为什么采用1000MHz 左右的载频?8. ADF-NDB 、罗兰A 、VOR 和ILS 这几种导航系统应分别采用什么电波传播方式? 9. 什么是无线电导航系统的“完好性”?简述该指标在导航系统中的重要性。
第2章 自动定向机1. ADF-NDB 系统有哪些导航应用?2. 振幅测向系统有哪些测向方法?简要给出各测向方法的实现过程及特点。
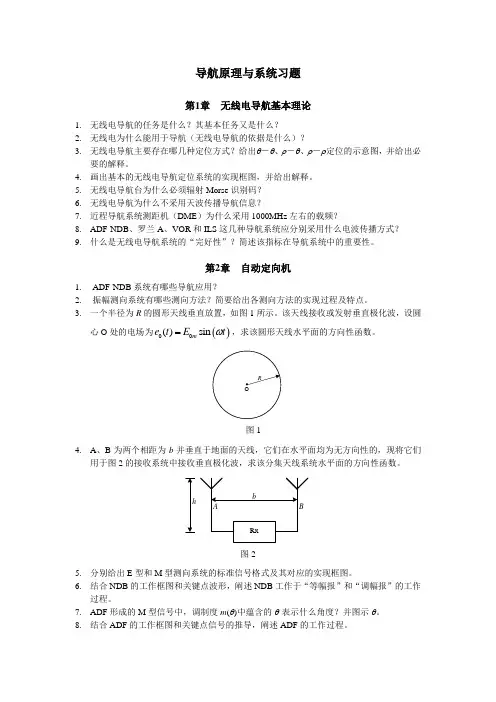
3. 一个半径为R 的圆形天线垂直放置,如图1所示。
该天线接收或发射垂直极化波,设圆心O 处的电场为()00()sin m e t E t ω=,求该圆形天线水平面的方向性函数。
图14. A 、B 为两个相距为b 并垂直于地面的天线,它们在水平面均为无方向性的,现将它们用于图2的接收系统中接收垂直极化波,求该分集天线系统水平面的方向性函数。
图25. 分别给出E 型和M 型测向系统的标准信号格式及其对应的实现框图。
6. 结合NDB 的工作框图和关键点波形,阐述NDB 工作于“等幅报”和“调幅报”的工作过程。
7. ADF 形成的M 型信号中,调制度m (θ)中蕴含的θ表示什么角度?并图示θ。
8. 结合ADF 的工作框图和关键点信号的推导,阐述ADF 的工作过程。
9.图3表示飞机处于NDB台的A、B、C和D位置,其中D表示飞机处于NDB台的正上空。
画出飞机处在这4个位置时,RMI的指示。
BDC图3第3章多普勒甚高频全向信标1.多普勒效应对DVOR信标的贡献在何处?2.DVOR在导航中主要有哪些应用?3.DVOR是如何利用多普勒效应产生30Hz FM信号的?4.DVOR系统的30Hz AM信号与30Hz FM信号之间的相位关系如何?它们之间的相位差表示什么含义?5.若飞机处在60 方位,写出DVOR 30Hz AM信号与30Hz FM信号的表达式,并画出它们的波形。
自习题1、高频通信系统的用途?2、LOC和GS接收机别离接收什么调制频率?〔如果飞机位于跑道中心线右侧,LOC接收机接收的调制音频中:150Hz调制音频大于90Hz凋制音频〕3、现代民航飞机的自动驾驶仪通常有哪两种通道4、TCRBS/DABS全呼叫信号中P1、P2、P3、和P4脉冲的宽度?〔P1、P3、P2脉冲的宽度相等但P4较宽〕5、陀螺罗盘是操纵三自由度陀螺的什么工作的?6、搭客播送的优先挨次?7、地球外表上任意两点的什么为最短?8、飞机导航设备中哪些属于自主(备)式设备?9、飞机相对方位角是指什么之间的夹角?〔飞机纵轴测量到飞机一导航台连线〕10、机载无线电高度表用途?11、对于只有A模式应答机的飞机,TCAS只可能发出什么信息?〔TA 〕12、飞行办理计算机的存储器内存储有那两个数据库?13、自动定向机〔ADF〕主要是依靠什么的标的目的性实现定向的?〔环形天线及垂直天线〕14、马赫数的大小决定于什么?15、在R M I上,V O R方位角的指示是按照什么?〔飞机磁航向加相对方位〕16、在飞机进近过程中,定夺高度是指什么?〔飞行员对继续进近或复飞作出定夺的最低高度〕17、GPWS控制板上的起落架/襟翼位置超控开关在“禁止〞位相当于什么?〔起落架放下,襟翼在着陆位置〕18、对惯性基准系统进行快速对准的接通条件是什么?〔系统在正常工作,方式选择开关在NA V位置且地速小于20海里/小时〕19、“荷兰滚〞运动是飞机绕什么轴的周期性运动?〔地轴及纵轴〕20、如果副驾驶将R/T一I/C开关扳向扳向I/C位时,不管MIC开关的位置如何,其话筒信号直接连接到什么系统?〔直接连接到飞行内话系统〕21、卫星通信系统的三大组成是什么?〔通信卫星、地球站群和遥控指令系统〕22、所谓方位角是指什么?〔以经线北端或其它基准线为基准,顺时针测量到程度面中某标的目的线之间的夹角〕23、飞行数据记录器输入信号有哪些?24、DME所提供的距离信息是按照什么?〔同步应答机脉冲接收时间与发射时间之差而计算的〕25、A T C应答机所应答的飞机高度信息,是由谁提供的?26、通常将由自动驾驶仪与飞机构成的不变飞机姿态的回路称为什么回路?27、在飞行把持过程中,副翼的主要作用是什么?〔提供对飞机重心的倾斜力矩〕28、偏航阻尼器的作用是什么?29、数字式大气数据计算机接收哪些信号?30、自动飞行控制系统顶用于控制飞机飞行速度方法有哪些?〔自动油门系统和自动驾驶仪俯仰通道〕31、TCASII所显示的不同图形和颜色的符号可暗示不同威胁等级的相遇飞机有哪些?32、GPS系统进入导航模式的必要条件是什么?33、飞行办理计算机的存储器内存储有哪些数据库?34、近地警告工作方式有哪些?35、航空地平仪的底子用途是什么?36、从工作道理上飞机仪表分为哪些?37、飞机从空中到实际海平面的垂直距离叫什么?38、大气数据仪表中没有使用开口膜盒的有哪些仪表?39、测量气压高度和速度别离操纵什么关系?40、马赫数的定义是什么?41、惯性导航系统用什么原始数据来计算飞机位置?42、三自由度陀螺主要有那两个底子特性?43、电子飞行仪表系统〔EFIS〕的主要功用是什么?44、EICAS能显示那些信息?45、EICAS“打消/重现〞电门能控制什么信息的显示?46、在何种情况下,EICAS计算机呈现自动转到右EICAS计算机工作?47、ACARS系统是操纵那种通信系统传递数据的?48、话音记录器和飞行记录器上的水下定位器的作用是什么?49、因磁子午线与真子午线标的目的不一致而形成的磁偏角称为什么?50、气象雷达的气象图显示在阿谁显示器上?51、抑止“荷兰滚〞运动的系统是什么?52、飞行办理计算机的导航功能是指什么?53、ATC应答机所答复的飞机高度信息是由谁提供的?54、ATC应答机C方式询问信号应答内容为飞机的什么?55、TCAS可向飞行员提供那些空中交通信息?56、TCAS发出的决策信息〔RA〕用于什么?57、在自动飞行控制系统中,控制飞行姿态的是什么?58、马赫配平系统的作用是什么?59、自动驾驶仪输出的信号是什么?60、飞行指引仪的功用是什么?61、当刚给飞机通电时,FMC—CDU正常的显示页面是什么?62、GPS的工作模式有哪些?63、仪表按功用可分为哪些?64、备用高度/速度表的信号由谁提供?65、EICAS系统的工作方式显示有哪些?66、导航是指什么?67、飞机的航向是指什么?68、现代飞机用于飞行记录的“黑匣子〞有哪些?69、偏航阻尼系统通过什么来控制飞机的“荷兰滚〞运动?70、VHF通信系统的用途是什么?71、ECAM警告可分为哪些等级?72、ACARS系统的用途是什么?73、三自由度陀螺的组成?74、自动定向〔ADF〕系统的天线有哪些组成?75、VOR方位角是指什么?76、无线电高度表测量范围和显示位置?77、仪表着落系统〔ILS〕包罗那三个分系统组成?78、FMCS组成?79、测距机用途是什么?80、FMC有哪些微处置机组成?81、飞机仪表的工作过程有哪些底子环节?82、导航系统有哪些分类?83、飞行指引仪的功用是什么?84、自动飞行控制系统〔AFCS〕的组成和功能是什么?85、什么叫马赫配平?现代飞机上如何实现?86、控制飞机运动轨迹的是什么?87、磁差是指什么?88、自动飞行控制系统是由哪些系统组成的?89、计算空速〔CAS〕是指什么?90、在铺助模式下GPS的输出是什么?91、当飞机相对地面存在不安然状态时,GPWS向飞行员提供的警告信息有哪些?92、TCASII的定夺咨询是指什么?93、机载S模式应答机发射应答信号时,哪些系统不克不及工作?94、现代机载气象雷达用途?95、引起前轮舱内的地面呼叫喇叭响的原因有哪些?96、飞行数据记录器输入信号有哪些?96、话音记录器和飞行记录器上的水下定位器的作用是什么?97、气象雷达的气象图显示在阿谁显示器上?98、马赫配平系统的作用是什么?99、自动驾驶仪输出的信号是什么?100、飞行指引仪的功用是什么?101、三自由度陀螺主要有哪些底子特性?102、在自动飞行控制系统中,控制飞行姿态的是什么?103、航空仪表按功用可分为哪些?104、效劳内话开关位于阿谁位置时,各效劳内话插孔才可通话联络?105、搭客播送系统的优先权是什么?106、航空地平仪的底子用途是什么?107、电动高度/速度表的信号是由谁提供的?108、FMC的导航数据库规定多少时间更新一次?109、VOR方位角是指什么?110、数字通信〔ACARS〕的工作方式有哪些? DEMAND〔请求〕方式和POLLED〔等待〕方式。
飞机维修执照《导航系统》考试题库及答案1、正常过站一般不需要重新校准惯导,然而机组必须在飞机静止时观察CDU(控制显示组件)上所显示的剩余地速,如果一个惯导的剩余地速大于()kts,则需完成快速校准?()A、3ktsB、5ktsC、8kts正确答案:B2、雷达的方式选择器在MAP(地图)位时,城市是以什么颜色显示的?()A、绿色B、蓝色C、黑色D、琥珀色正确答案:D3、当GPS主用失去,FMS导航精度检查结果不允许机组在飞行阶段使用导航方式,顶板上的TERR按钮需不需要关闭?()A、需要B、不需要正确答案:A4、起飞滑跑100海里/小时以前,系统探测到前方5海里有风切变,ND上()获得风切变图像,同时PFD上()显示W/SAHEAD字样A、能,能B、能,不能C、不能,能正确答案:B5、FMGS中高度限制通常是洋红色*表明系统预测限制值和预测飞机高度值不一致,认为不能满足此高度限制,如果在爬升中出现琥珀色﹡()A、系统预测限制值>预测飞机高度250英尺B、系统预测限制值>预测飞机高度500英尺C、系统预测限制值>预测飞机高度1000英尺正确答案:A6、飞机光洁构型平飞时,前方有冲突地形,当“PULLUP”响起,操纵飞机上升避开冲突地形,此过程中“PULLUP”将一直提醒机组直到飞机离开冲突范围,并获得()英尺的高度增量后,警告才会解除A、300B、500C、1000正确答案:A7、要避开大风暴,机组必须在离天气现象()以外做出决定?A、20海里B、40海里C、80海里正确答案:B8、FMGS可以存储最多()个导航台?A、10B、15C、20正确答案:C9、进近时低于()英尺时,RA被抑制?A、1100英尺B、1000英尺C、900英尺正确答案:C10、双FMGC失效的情况下,位于操纵台上的RMP(无线电管理面板)1和2提供导航设备的备用调谐,此时第一部VOR1可以在哪个面板调谐?()A、机长侧的RMPB、副驾驶侧的RMPC、两部都可以正确答案:A11、VFE(最大放出襟翼速度),当襟/缝翼放出时,飞机速度大于VFE()时,将触发OVERSPEED警告?A、3ktsB、4ktsC、5kts正确答案:B12、当空速不可靠的时候,超速警告有没有可能是假信号?()A、有可能B、不可能正确答案:A13、当TCAS的交通选择器放在THRT(威胁)位时,能否显示前方30海里与本机同高度同方向飞行的飞机?()A、能B、不能正确答案:B14、若ADIRS(大气数据惯性基准系统)的校准或初始化不正确ALIGN(校准灯)将闪烁,此时INT(起始)页面将显示:()A、REALIGNIRSB、ALIGNIRS正确答案:A15、飞机校准需要输入当前位置(PPOS),对于长距离飞行没有无线电更新或未安装GPS的飞机而言,校准时使用最好的当前位置是:(1)存储在FMS数据库中的坐标;(2)停机位牌子上的坐标;(3)杰普逊航图上的机场及停机位坐标。
AOPA航空导航考试理论题库
简介
本文档是AOPA航空导航考试的理论题库,旨在帮助考生为该考试做准备。
题库包含了航空导航的各个方面,涉及知识点广泛,
覆盖了航空导航的基本原理、仪表飞行规则、气象因素等内容。
考
生可以通过研究和答题来提升对航空导航的理解和应用能力。
题目示例
1. 下列哪项是航空导航的基本原理之一?
- A) 惯性导航
- B) 跟随导航
- C) 天文导航
- D) 超声波导航
2. 仪表飞行规则(IFR)是指在下列哪种飞行条件下进行飞行?
- A) 可见气象条件
- B) 目视飞行规则(VFR)下
- C) 雾、云层或其他不利气象条件下
- D) 夜间飞行
3. 气象雷达主要用于探测下列哪种天气现象?
- A) 雾
- B) 降雨
- C) 雪
- D) 台风
4. 在航空导航中,VOR是指什么?
- A) 无线电导航台
- B) 可视导航标志
- C) 雷达导航设备
- D) 仪表飞行规则
...
结论
本文档提供了AOPA航空导航考试的理论题库,通过学习和答题,考生可以提升对航空导航知识的掌握和应用能力。
希望考生能
够利用此题库进行有针对性的复习,为成功完成考试打下坚实的基础。
监控操作试题
一、对25号航向设备当前参数进行保存。
二、对07号下滑设备进行定时自动保存数据。
三、通过DVOR/DME遥控器辨别台上设备供电状况。
四、对ILS设备、DVOR/DME、FSD-40(DME)设备进行开关、转化的操
作。
五、使用CMS-2系统对台上的设备进行开关机、转换的操作。
六、NDB和指点标无线转有线。
七、使用FSD-40软件对台上设备进行开关、转换、标准/热备的操作。
八、指出当ILS设备的壁挂电源故障时,在软件上显示的参数位置。
九、连接远近台视频监视。
十、判断一下当CMS-2软件界面上显示全部通信中断,猫池上的灯显示正
常,故障位置。
答:计算机本身或计算机到串口服务器的网线故障。
十一、手动连接场内安防。
十二、CMT的操作(连接台站、对台站设备进行开关、转换)
十三、查询CMT故障参数
十四、利用CMS-2软件查询台站环境状况。
十五、判断在FSD-40的遥控器上哪个状态灯代表台上设备的供电状况。
通信专业操作试题(高频)1.请将短波频率5658KHz输入到短波发射机,并将发射机调整为上边带、半功率工作方式。
2.请你在最短的时间内调谐好一部MT-1501A短波发射机。
(频率自选,须错开工作频率)3.请演示如何利用短波机房预放器对4#发射机进行本地试机。
4.请演示如何将7# MT-1501A发射机调整到5#模拟遥控线工作。
5.请输入短波频率5658KHz到海华RX1002接收机,将工作种类置于CW(等幅报),ANT.ATT.20DB(天线衰减20Db),AGC LONG(AGC 时间常数长),带宽设为N(窄带),步进——拍频转换设为H 150。
6.请将短波专机频率13248KHz存储到海华RX1002接收机第10信道并调出该频率。
7.请说明MT501A/C短波发射机激励器调谐选择旋钮各档功能。
8.请演示如何用万用表本地模拟测量遥控线上的PTT控制电压。
9.请演示如何用万用表测量发射台至航管楼模拟遥控线是否正常。
10.请测量短波笼型天线对地电阻。
11.请测量2#短波发射机三项电源数值是否正常。
通信专业操作试题(甚高频)1.请你操作如何将R&S电台(XU250)设置成以下几种状态:“LOC ON、LOC OFF、REM ON、SBY OFF”2.请你操作如何设置R&S电台(XU250)的调制度。
3.请你操作如何设置R&S电台(XU250)的频率和频偏。
4.请你操作如何调整R&S电台(XU250)的功率置30W。
5.请你操作如何调整R&S电台(XU250)的功率为低功率并设置低功率为6W。
6.请你操作如何将R&S电台(XU250)的静噪关闭。
7.请你操作如何调整R&S电台(XU250)静噪电平。
8.请你操作如何改变R&S电台(XU250)静噪信号方式。
9.请你操作如何利用R&S电台(XU250)面板测量开关测量功率、驻波比、调制度。
《航空无线电导航技术》习题1、超短波通信的特点是(C )。
A:不受地形地物的影响B:无衰落现象C:通信距离限定在视距D:频段范围宽,干扰小2、长波、中波的传播是以(B)传播方式为主。
A:天波B:地波C:直射波D:地面反射波3、短波传播是以(A )传播方式为主。
A:天波B:地波C:直射波D:地面反射波4、超短波传播是以(C )传播方式为主。
A:天波B:地波C:直射波D:地面反射波5、高频通信采用的调制方式是(B)。
A:等幅制B:调幅制C:调频制D:调相制6、关于短波通信使用频率,下述中正确的是(B )。
A:距离远的比近的高B:白天比晚上的高C:冬季比夏季的高D:与时间、距离等无关7、天波传输的特点是( A )。
A:传播距离远B:信号传输稳定C:干扰小D:传播距离为视距8、地波传输的特点是( A )。
A:信号传输稳定B:传播距离为视距C:受天气影响大D:传播距离远9、直射波传播的特点是( C )。
A:传播距离远B:信号传输不稳定C:传播距离为视距D:干扰大10、单边带通信的缺点是(D )。
A:频带宽B:功率利用率低C:通信距离近D:收发信机结构复杂,要求频率稳定度和准确度高11、飞机与塔台之间的无线电联络使用(B )通信系统。
A:高频B:甚高频C:微波D:卫星12、飞机与区调或站调之间的无线电联络使用(A)通信系统。
A:甚高频B:高频C:微波D:卫星13、目前我国民航常用的空管雷达是(A )。
A:一、二次监视雷达B:脉冲多普勒雷达C:着陆雷达D:气象雷达14、相对于单独使用二次雷达,使用一次、二次雷达合装的优点是( C )。
A:发现目标的距离更B:常规二次雷达条件下提高雷达系统的距离分辨力C:能够发现无应答机的目标D:克服顶空盲区的影响15、二次监视雷达与一次监视雷达相比的主要优点是(A)。
A:能够准确提供飞机的高度信息B:能够探测气象信息并能够给出气象轮廓C:能够准确提供飞机的距离信息D:不受顶空盲区的影响16、二次雷达的主要缺点是( A )。
A:不能发现无应答机的飞行器B:作用距离不如一次雷达远C:对气象条件比较敏感D:不能提供过渡层以下准确的高度信息17、PTT是指( A )。
A:Push To Talk B:Pulse Transmission TimeC:Push To Test D:Put To Terminal18、民航VHF地空通信的工作方式是(B )。
A:单工B:半双工C:全双工D:全单工19、VHF通信只能以(C)方式传播。
A:天波B:地波C:空间波D:散射波20、某VHF收发信机的工作频率为125M Hz,此频率是指(B)。
A:接收机的本振信号频率B:发射机的载波频率C:话音信号频率D:中频频率21、话音信号的主要能量集中的频率范围是( C )。
A:50~10000Hz B:200~5000HzC:300~3400Hz D:400~5000Hz22、二次监视雷达系统的机载设备应由(D)等组成。
A:应答机、高度编码器、控制盒B:应答机、高度编码器C:高度编码器、控制盒D:应答机、控制盒23、SSB是指(C )。
A:标准调幅B:双边带调幅C:单边带调幅D:残留边带调幅24、SSB通信的优点是(A )。
A:节省发射功率B:接收设备简单C:易于实现D:频率稳定度、准确度不需很高25、AM是指(A )。
A:标准调幅B:双边带调幅C:单边带调幅D:残留边带调幅26、AM接收机采用(B )进行检波。
A:同步检波器B:包络检波器C:鉴频器D:鉴相器27、二次雷达存在不容易克服的异步干扰,异步干扰是由(B )引起的。
A:接收到其它询问机的询问-回答信号B:接收到自身雷达旁瓣询问的回答C:接收到反射询问的回答D:接收到自身雷达的主瓣询问的回答28、民航对空广播的作用是(A )。
A:及时传送飞行动态及气象信息B:随时报告各导航台的位置C:随时确定飞机的高度和位置D:随时报告机场位置29、当调制度由30%调整为80%时,AM信号功率将(B )。
A:变小B:变大C:不变D:不一定30、通信时只发送上边带或下边带的调制方式称为(B )。
A:AM B:SSB C:VSB D:DSB 31、在行使远距离飞行管制任务而没有其他通信手段的地方,应使用(D )。
A:甚高频电台B:超短波电台C:中波电台D:高频电台32、能够在连接地面电台和机载电台的无线电话信道上选择呼叫个别飞机的系统称为(D )。
A:数据终端B:数据选择系统C:话音控制系统D:选择呼叫系统33、VHF天线的极化方式是( B )。
A:水平极化B:垂直极化C:圆极化D:椭圆极化34、全向信标测向的基本原理是测量二个低频信号的(B )。
A:频率差B:相位差C:幅度差D:速度差35、已知飞机的磁航向是90度,相对方位是225度,则全向信标方位是( D )。
A:45度B:135度C:225度D:315度36、全向信标的调制信号频率是(A )。
A:30Hz B:60Hz C:90Hz D:150HZ37、全向信标的方位信号在机上送到( A )指示。
A:HSI B:ADI C:VSI D:ADF38、机上DME显示器通常可显示(B )。
A:高度B:距离C:方位D:仰角39、航向信标的作用是给着陆飞机提供( C )。
A:距离信息B:方位信息C:航向面D:下滑面40、下滑信标的作用是给着陆飞机提供(D )。
A:距离信息B:方位信息C:航向面D:下滑面41、下列飞机定位系统中,定位误差最小的是(C )。
A:ADF/NDB B:VOR/DMEC:GPS D:INS42、利用DME进行定位,要求至少同时接收到(B )DME信标的信号。
A:1个B:2个C:3个D:4个43、利用VOR进行定位,要求至少同时接收到(B )VOR的信号。
A:1个B:2个C:3个D:4个44、DME的作用是( C )。
A:测量飞机到DME信标的水平距离B:测量飞机到DME信标的垂直距离C:测量飞机到DME信标的直线距离D:测量飞机到地面的高度45、VOR的作用是测量(B )。
A:飞机航向B:飞机方位C:电台航向D:电台方位46、DME地面信标可同时供(B )飞机测距使用。
A:80架B:100架C:120架D:150架47、下列导航设备中,不属于自备式的是( D )。
A:磁罗盘B:惯性导航C:多普勒雷达D:无线电罗盘48、下列导航设备中,不属于他备式的是(C )。
A:二次雷达B:着陆雷达C:多普勒雷达D:一次雷达49、下列导航设备中,属于航路导航的是(B )。
A:航向信标B:全向信标C:下滑信标D:指点信标50、下列导航设备中,不属于航路导航的是(A )。
A:航向信标B:全向信标C:无方向信标D:DME信标51、应答机是通过识别P1-P2脉冲的( C )来判断是否是旁瓣询问的。
A:宽度B:重复周期C:幅度D:间隔52、ILS的两个调制音频为( C )。
A:30Hz/90Hz B:60Hz/150HzC:90Hz/150Hz D:60Hz/90Hz53、下列导航设备中,属于着陆系统的是()。
A:SSR B:PSR C:ILS D:GPS 54、VOR方位角(B )。
A:与磁航向有关B:与磁航向无关C:与空速有关D:与地速有关55、当飞机航向改变时,(A )。
A:磁航向、相对方位都随之改变,而VOR方位不变B:磁航向、相对方位、VOR方位都随之改变C:磁航向随之改变,而相对方位、VOR方位都不改变D:磁航向、相对方位、VOR方位都不改变56、ILS的航向指示如显示90Hz占优,则说明着陆飞机(B )。
A:在航向面内B:在航向面左侧C:在航向面右侧D:不能确定57、ILS的航向指示如显示150Hz占优,则说明着陆飞机(C )。
A:在航向面内B:在航向面左侧C:在航向面右侧D:不能确定58、ILS的航向指针居中,则说明着陆飞机( A )。
A:在航向面内B:在航向面左侧C:在航向面右侧D:不能确定59、ILS的下滑指示如显示90Hz占优,则说明着陆飞机( B )。
A:在下滑面内B:在下滑面以上C:在下滑面以下D:不能确定60、ILS的下滑指示如显示150Hz占优,则说明着陆飞机(C )。
A:在下滑面内B:在下滑面以上C:在下滑面以下D:不能确定61、ILS的下滑指针居中,则说明着陆飞机( A )。
A:在下滑面内B:在下滑面以上C:在下滑面以下D:不能确定62、当着陆飞机飞在航向面内时,则航向指示显示(C )。
A:90Hz占优B:150Hz占优C:两者相等D:不能确定63、当着陆飞机飞在航向面左侧时,则航向指示显示(A )。
A:90Hz占优B:150Hz占优C:两者相等D:不能确定64 、当着陆飞机飞在航向面右侧时,则航向指示显示( B )。
A:90Hz占优B:150Hz占优C:两者相等D:不能确定65、当着陆飞机飞在下滑面内时,则下滑指示显示(C )。
A:90Hz占优B:150Hz占优C:两者相等D:不能确定66、当着陆飞机飞在下滑面以上时,则下滑指示显示(A )。
A:90Hz占优B:150Hz占优C:两者相等D:不能确定67、当着陆飞机飞在下滑面以下时,则下滑指示显示( B )。
A:90Hz占优B:150Hz占优C:两者相等D:不能确定68 、当着陆飞机飞在下滑面内时,则下滑指示器指针(C )。
A:指向上边B:指向下边C:居中D:不能确定69、当着陆飞机飞在下滑面以上时,则下滑指示器指针(B )。
A:指向上边B:指向下边C:居中D:不能确定70 、当着陆飞机飞在下滑面以下时,则下滑指示器指针(A )。
A:指向上边B:指向下边C:居中D:不能确定71、当着陆飞机飞在航向面内时,则航向指示器指针(C )。
A:指向左边B:指向右边C:居中D:不能确定72、当着陆飞机飞在航向面左侧时,则航向指示器指针(B )。
A:指向左边B:指向右边C:居中D:不能确定73、当着陆飞机飞在航向面右侧时,则航向指示器指针(A )。
A:指向左边B:指向右边C:居中D:不能确定74、LOC和(C )共用一个频段。
A:GS B:DME C:VOR D:NDB 75、DME系统的询问和应答频率差(B )。
A:为1MHz B:为63MHzC:为126MHz D:不固定76、一个DME询问频率对应(B )应答频率。
A:1个B:2个C:3个D:4个77、ILS的LOC和GS频率(A )。
A:固定配对B:随便配对C:固定为三倍D:固定为三分之一78、VOR和DME合装时,二者频率(A )。
A:固定配对B:随便配对C:固定为九倍D:固定为九分之一79、LOC和DME合装时,二者频率(A )。
A:固定配对B:随便配对C:固定为九倍D:固定为九分之一80、ILS的LOC和GS均采用( A )。