自动控制理论第版夏德钤 翁贻方第二章控制系统的数学模型
- 格式:ppt
- 大小:2.46 MB
- 文档页数:76
自动控制理论第2版(夏德钤著)课后习题答案下载夏德钤的《自动控制理论第2版》比拟全面和详细地介绍了经典控制理论的根本内容。
以下是为大家的自动控制理论第2版(夏德钤著),希望能对你有帮助!目前普通高等院校“自动控制理论(原理)”教学学时大致有三种,48学时、64学时和80学时。
自动控制理论(原理)涉及专业比拟多,教学内容以经典控制理论为主,控制对象依据专业而不同。
本书主要适用专业为:电气工程及其自动化,机械设计及其自动化,电子信息工程。
局部内容(例如控制对象方面的例题)稍加修改,也可以适应其他如建筑环境与能源应用工程专业等。
本教材是与上述的教学学时和专业相配套的教学参考书(80学时及以上的还需要略微补充一点内容),同时也可作为学生自学教材。
在编写《自动控制理论》的过程中,我们重视根底理论知识,参加拉普拉斯变换内容,从第3章开始,参加MATLAB仿真的内容。
通过细化根轨迹和频率特性绘图过程,使学生更好地掌握图形绘制,掌握自动控制系统的分析和设计方法。
在注重应用的前提下,精选教学内容和配套习题,在文字表达方面力求清晰、准确,教材内容适度。
本教材的所有编者长期工作在教学第一线,也有很强的自动控制和电气控制的实践经历,我们力求将这些经历融入本教材中。
本书第1章由赵浩老师编写,第2章和第6章由朱宁老师编写,第3章由童佳老师编写,第4章由丁立军编写,第5章由高慧敏老师编写,第7章由林立老师编写。
陈叠峰和任美华两位同学编写了局部的MATLAB章节。
由于编者水平有限、编写时间紧迫,教材中难免有缺点和错误,恳请读者批评指正,以使我们有更大的进步。
[1] 编者xx年8月第1章自动控制的根本知识1.1自动控制的开展历史和根本概念1.2自动控制的根本控制方式1.3自动控制系统的分类1.4自动控制系统的性能指标习题1第2章控制系统的数学模型2.1数学模型的根本概念2.2控制系统数学模型——微分方程2.3拉普拉斯变换与反变换2.4传递函数2.5控制系统的动态构造图、信号流图与梅逊公式习题2第3章线性系统的时域分析法3.1系统分析的根本假设条件和分析指标3.2一阶系统的时域分析3.3二阶系统的时域分析3.4高阶系统的时域响应3.5线性定常系统的稳定性3.6线性系统的稳态误差计算3.7用MATLAB辅助分析控制系统时域性能习题3第4章控制系统的根轨迹法4.1根轨迹的根本概念4.2绘制根轨迹的规那么和方法4.3广义根轨迹4.4控制系统根轨迹的性能分析4.5用MATLAB绘制根轨迹习题4第5章控制系统的频域分析法5.1频率特性的根本概念5.2对数频率特性及其绘制5.3幅相频率特性及其绘制5.4稳定判据5.5稳定裕度5.6系统的开、闭环频率特性与阶跃响应的关系5.7MATLAB在频率法中的应用习题5第6章控制系统的校正6.1控制系统校正的根本概念6.2根本控制规律和常用校正装置6.3频率校正方法6.4反应校正6.5复合控制方法6.6Simulink在控制系统仿真中的应用习题6第7章离散控制系统7.1离散控制系统根本概念7.2信号的采样与复现7.3离散控制系统的数学模型7.4离散系统分析7.5应用MATLAB进展离散系统分析习题7参考文献1.2.3.。
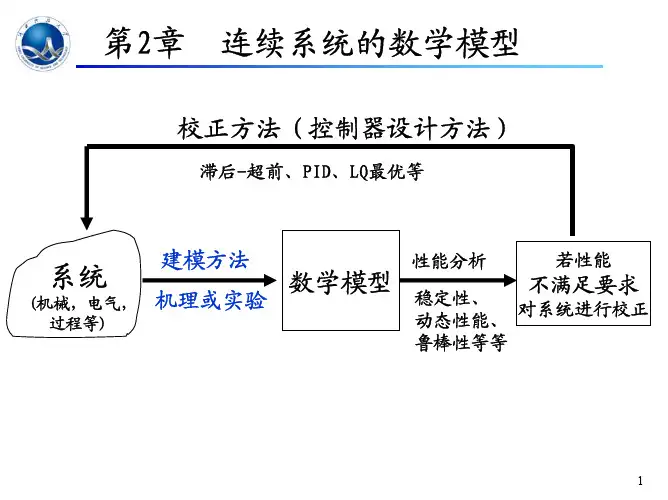
第二章 自动控制系统的数学模型研究一个自动控制系统,除了对系统进行定性分析外,还必须进行定量分析,进而探讨改善系统稳态和动态性能的具体方法。
控制系统的运动方程式(也叫数学模型)是根据系统的动态特性,即通过决定系统特征的物理学定律,如机械﹑电气﹑热力﹑液压﹑气动等方面的基本定律而写成的。
它代表系统在运动过程中各变量之间的相互关系 ,既定性又定量地描述了整个系统的动态过程。
因此,要分析和研究一个控制系统的动态特性,就必须列写该系统的运动方程式,即数学模型。
第一节 系统动态微分方程模型常用的列写系统或环节的动态微分方程式的方法有两种﹕一种是机理分析法,即根据各环节所遵循的物理规律(如力学﹑电磁学﹑运动学﹑热学等)来编写。
另一种方法是实验辩识法,即根据实验数据进行整理编写。
在实际工作中,这两种方法是相辅相成的,由于机理分析法是基本的常用方法,本节着重讨论这种方法。
下面通过简单示例介绍机理分析法的一般步骤。
图2-1 RLC 网络[例2-1] 列写图2-1所示RLC 网络的微分方程。
解 1. 明确输入、输出量网络的输入量为电压)(t u r ,输出量为电压)(t u c 。
2.列出原始微分方程式。
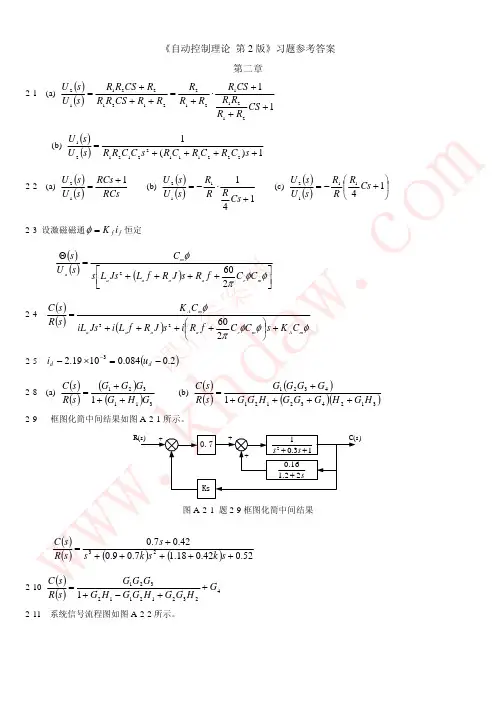
根据电路理论得 )()(1)()(t Ri dt t i Cdt t di Lt u r ⎰++= (2-1) 而 ⎰=dt t i C t u c )(1)( (2-2) 式中)(t i 为网络电流,是除输入、输出量之外的中间变量。
3.消去中间变量将式(2-2)两边求导,得)(1)(t i C dt t du c = 或 dtt du C t i c )()(= (2-3) 代入式(2-1)整理为 )()()()(22t u t u dt t du RC dtt u d LC r c c c =++ (2-4) 显然,这是一个二阶线性微分方程,也就是2-1所示RLC 无源网络的数学模型。
[例2-2] 试列写图2-2所示电枢控制直流电动机的微分方程,要求取电枢电压)(t u a(V )为输入量,电动机转速)(t m ω)(s rad 为输出量。
《⾃动控制理论_第2版(夏德钤)》习题答案详解《⾃动控制理论第2版(夏德钤)》习题答案详解第⼆章2-1 试求图2-T-1所⽰RC ⽹络的传递函数。
(a)11111111+=+?=Cs R R CsR Cs R z ,22R z =,则传递函数为: 2121221212)()(R R Cs R R R Cs R R z z z s U s U i o +++=+= (b) 设流过1C 、2C 的电流分别为1I 、2I ,根据电路图列出电压⽅程:=++=)(1)()]()([)(1)(2221111s I s C s U s I s I R s I sC s U o i 并且有)()1()(122211s I sC R s I s C += 联⽴三式可消去)(1s I 与)(2s I ,则传递函数为:1)(1111)()(222111221212211112++++=+ ++=s C R C R C R s C C R R R s C R s C s C R sC s U s U i o 2-2 假设图2-T-2的运算放⼤器均为理想放⼤器,试写出以i u 为输⼊,o u 为输出的传递函数。
(a)由运算放⼤器虚短、虚断特性可知:dtduC dt du C R u i i 0+-=,0u u u i c -=,对上式进⾏拉⽒变换得到)()()RCs s U s U i 1)()(0+= (b)由运放虚短、虚断特性有:022=-+--R u R u u dt du Cc c i c ,0210=+R u R u c ,联⽴两式消去c u 得到02220101=++?u R u R dt du R CR i 对该式进⾏拉⽒变换得0)(2)(2)(20101=++s U R s U R s sU R CR i 故此传递函数为)4(4)()(10+-=RCs R R s U s U i (c)02/2/110=+-+R uR u u dt du Cc c c ,且21R u R u c i -=,联⽴两式可消去c u 得到0222101=++?Ru R u dt du R CR i i 对该式进⾏拉⽒变换得到0)(2)(2)(2011=++?s U Rs U R s sU R CR i i 故此传递函数为RCs R R s U s U i 4)4()()(110+-= 2-3 试求图2-T-3中以电枢电压a u 为输⼊量,以电动机的转⾓θ为输出量的微分⽅程式和传递函数。