第六章 控制系统的性能分析.
- 格式:ppt
- 大小:710.00 KB
- 文档页数:34
鲁棒控制理论第六章引言鲁棒控制是一种应对系统参数变化、外部干扰、测量噪声等不确定性因素的控制方法。
在工程控制中,系统的不确定性是常见的,对系统的稳定性和性能造成了挑战。
鲁棒控制理论通过设计具有鲁棒性的控制器,可以保证系统在存在不确定性的情况下仍能满足一定的性能要求。
本文将介绍鲁棒控制的基本概念、设计方法和应用示例等内容。
鲁棒性分析鲁棒性分析是鲁棒控制的基础,通过分析系统的不确定性对控制器性能的影响,评估控制器的鲁棒性。
鲁棒性分析一般包括稳定性分析和性能分析两个方面。
稳定性分析稳定性是控制系统最基本的要求。
对于鲁棒控制系统,稳定性分析主要关注系统的稳定性边界,即系统参数变化在何种范围内仍能保持稳定。
常用的鲁棒稳定性分析方法包括结构化奇異值理论和小结构摄动方法等。
性能分析除了稳定性,控制系统的性能也是重要的考虑因素。
性能分析通常包括鲁棒性能和鲁棒鲁棒性能两个方面。
鲁棒性能是指系统在存在不确定性的情况下,能否满足一定的性能指标。
通过分析不确定性对闭环系统传递函数的影响,可以评估系统的鲁棒性能。
鲁棒鲁棒性能是指系统在存在不确定性的情况下,能够满足给定的鲁棒鲁棒性能规范。
鲁棒鲁棒性能设计方法包括鲁棒饱和控制器设计方法和鲁棒H-infinity控制器设计方法等。
鲁棒控制设计鲁棒控制设计是鲁棒控制理论的核心内容。
鲁棒控制设计方法包括鲁棒控制设计和鲁棒控制设计方法。
鲁棒控制设计方法鲁棒控制设计方法是通过设计鲁棒控制器来实现鲁棒控制的方法。
鲁棒控制设计方法通常分为线性鲁棒控制和非线性鲁棒控制两类。
线性鲁棒控制设计方法中,常用的方法包括μ合成方法、玛尔科夫参数跟踪方法,以及基于奇異值方法的设计等。
非线性鲁棒控制设计方法中,常用的方法包括滑模控制、自适应控制、模糊控制和神经网络控制等。
鲁棒控制设计鲁棒控制设计是指将鲁棒控制理论应用于实际控制系统中,并进行控制器设计的过程。
鲁棒控制设计需要考虑系统的性能要求、鲁棒性要求和控制器结构等因素。
机械《机床电气控制》教案第一章:绪论1.1 课程介绍解释机床电气控制课程的目标和重要性。
概述机床电气控制的基本概念和历史。
1.2 机床电气控制系统的组成介绍机床电气控制系统的常见组成部分,例如电源、控制器、执行器等。
解释各部分的功能和相互作用。
1.3 机床电气控制技术的发展趋势探讨机床电气控制技术的发展历程。
介绍当前机床电气控制技术的发展趋势和未来展望。
第二章:电气元件2.1 电源介绍机床电气控制系统中电源的作用和类型。
解释不同电源的特点和应用场景。
2.2 控制器讲解控制器的功能和工作原理。
介绍常见的控制器类型,如继电器控制器、PLC控制器等。
2.3 执行器解释执行器的作用和分类。
探讨不同执行器的工作原理和应用领域。
第三章:电气控制原理3.1 控制逻辑介绍电气控制逻辑的基本概念和常用符号。
解释逻辑运算和逻辑门电路的工作原理。
3.2 控制电路设计讲解控制电路设计的基本原则和方法。
探讨如何根据机床需求设计合适的控制电路。
3.3 控制电路实例分析分析具体的机床控制电路实例。
解释电路的工作原理和功能。
第四章:PLC控制系统4.1 PLC基本原理介绍可编程逻辑控制器(PLC)的定义和工作原理。
解释PLC的主要组成部分和功能。
4.2 PLC编程讲解PLC编程的基本语言和指令系统。
探讨如何使用PLC编程实现机床控制功能。
4.3 PLC控制系统设计讲解PLC控制系统设计的基本步骤和方法。
探讨如何根据机床需求设计合适的PLC控制系统。
第五章:机床电气控制系统的维护与故障诊断5.1 机床电气控制系统的维护讲解机床电气控制系统的日常维护和保养方法。
解释如何检查和解决问题以保持系统正常运行。
5.2 故障诊断与维修介绍故障诊断的基本方法和技巧。
探讨如何诊断和修复机床电气控制系统中常见的故障。
第六章:典型机床电气控制系统的分析6.1 数控机床电气控制系统介绍数控机床电气控制系统的组成及特点。
分析数控机床的主轴驱动、进给驱动和辅助装置的控制原理。
自动控制原理胡寿松笔记自动控制原理是电气工程领域的重要课程,胡寿松教授的笔记是该领域学习的重要参考资料。
本文将按照章节顺序,对胡寿松教授的笔记进行梳理和总结,帮助读者更好地理解和掌握自动控制原理。
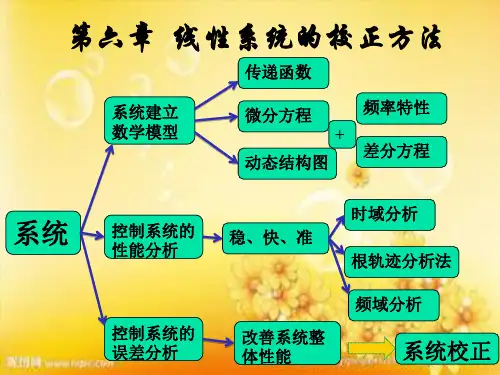
第一章自动控制的基本概念1. 自动控制的基本组成:控制器、传感器、执行器、被控对象。
2. 自动控制的目的:实现对系统的稳态和动态性能的优化。
3. 自动控制的基本术语:控制量、受控量、干扰、传递、转换等。
4. 自动控制系统的分类:开环控制系统和闭环控制系统。
第二章自动控制系统的数学模型1. 微分方程:描述系统动态特性的基本数学工具。
2. 传递函数:描述控制系统动态特性的重要数学模型。
3. 动态结构图:描述控制系统动态特性的图形工具。
4. 信号流图:描述控制系统内部信息传递方式的图形工具。
5. 梅逊公式:用于将微分方程转化为传递函数的公式。
第三章线性定常系统的时域分析法1. 控制系统性能的评价指标:稳态误差、超调量、调节时间等。
2. 系统的稳定性分析:稳定性定义、代数稳定判据、李亚普诺夫直接法。
3. 系统性能的改善:放大缩小法、超前滞后补偿法、PID控制器等。
4. 一系列具体分析方法的介绍:单位阶跃响应、斜坡响应、李亚普诺夫直接法等。
第四章线性定常系统的根轨迹法1. 根轨迹的基本概念和性质:幅值-相位特性、零点-极点关系、渐近线等。
2. 绘制根轨迹的基本规则和步骤:参数方程、几何意义、注意事项等。
3. 根轨迹图的特征分析:闭环零点、极点与系统性能的关系等。
4. 基于根轨迹法的系统优化设计:稳定化控制器设计、增益调度等。
第五章线性系统的频域分析法1. 频率域的基本概念和性质:频率特性、频率响应、频域分析方法等。
2. 频率域分析方法的应用:稳定性分析、系统性能评估、频率特性设计等。
3. 对数频率特性曲线及其应用:增益边界和相位边界的意义、系统性能的评估等。
4. 基于频率域分析法的系统优化设计:频率相关控制器设计、频率调制等。

控制工程基础董景新第四版简介《控制工程基础董景新第四版》是董景新教授所著的一本控制工程入门教材,通过全面介绍控制工程的基本概念、基本理论和基本方法,帮助读者建立起对控制工程的基础知识和基本技能的理解和掌握。
内容第一章:引言本章主要介绍控制工程的基本概念和发展历程,为后续章节的学习奠定基础。
首先对控制系统和控制工程的定义进行了阐述,并介绍了控制工程的主要任务和发展方向。
其次,对控制系统的分类进行了介绍,包括开环控制系统和闭环控制系统。
最后,介绍了控制系统的相关术语和符号,为后续章节的学习做好铺垫。
第二章:数学基础本章主要介绍控制工程所需要的数学基础知识。
首先介绍了常见的数学函数和符号,包括常用数学函数、求和符号、积分符号等。
其次,介绍了常用的数学运算法则,包括加法、乘法、指数运算等。
最后,介绍了常见的数学方程和常用的数学方法,包括线性方程组、矩阵运算、微积分等。
第三章:信号与系统本章主要介绍信号与系统的基本概念和分析方法。
首先介绍了信号的定义和分类,包括连续信号和离散信号、周期信号和非周期信号。
其次,介绍了信号的表示与分解方法,包括傅里叶级数和傅里叶变换。
最后,介绍了系统的定义和分类,包括线性系统和非线性系统、因果系统和非因果系统。
同时,介绍了系统的时域分析方法和频域分析方法。
第四章:传递函数与系统响应本章主要介绍传递函数和系统的响应特性。
首先介绍了传递函数的定义和性质,包括零极点分布和传递函数的单一性。
其次,介绍了系统的稳定性和系统的稳定判据,包括极点位置的判断和Nyquist判据。
最后,介绍了系统的时域响应和频域响应,包括单位冲击响应、单位阶跃响应、频率响应等。
第五章:控制系统的稳定性分析本章主要介绍控制系统的稳定性分析方法。
首先介绍了控制系统的稳定性的概念和判据,包括极点位置的判断和Nyquist稳定性判据。
其次,介绍了控制系统的根轨迹法和频率响应法,用于稳定性分析和设计。
最后,介绍了控制系统的相角裕度和增益裕度的概念和计算方法。
《现代控制理论》教案大纲第一章:绪论1.1 课程背景与意义1.2 控制系统的基本概念1.3 控制理论的发展历程1.4 教学内容与目标第二章:线性控制系统的基本理论2.1 数学基础2.1.1 向量与矩阵2.1.2 复数与复矩阵2.1.3 拉普拉斯变换与Z变换2.2 线性微分方程2.3 线性差分方程2.4 线性系统的状态空间描述2.5 线性系统的传递函数2.6 小结第三章:线性控制系统的稳定性分析3.1 系统稳定性的概念3.2 劳斯-赫尔维茨稳定性判据3.3 奈奎斯特稳定性判据3.4 李雅普诺夫稳定性理论3.5 小结第四章:线性控制系统的性能分析与设计4.1 性能指标4.1.1 稳态性能4.1.2 动态性能4.2 控制器设计方法4.2.1 比例积分微分(PID)控制器4.2.2 状态反馈控制器4.2.3 观测器设计4.3 小结第五章:非线性控制系统理论5.1 非线性系统的基本概念5.2 非线性方程与非线性微分方程5.3 非线性系统的状态空间描述5.4 非线性系统的稳定性分析5.5 小结第六章:非线性控制系统的性能分析与设计6.1 非线性性能指标6.2 非线性控制器设计方法6.2.1 反馈线性化方法6.2.2 滑模控制方法6.2.3 神经网络控制方法6.3 小结第七章:鲁棒控制理论7.1 鲁棒控制的概念与意义7.2 鲁棒控制的设计方法7.2.1 定义1-范数方法7.2.2 H∞控制方法7.2.3 μ-综合方法7.3 小结第八章:自适应控制理论8.1 自适应控制的概念与意义8.2 自适应控制的设计方法8.2.1 模型参考自适应控制8.2.2 适应律与自适应律8.2.3 自适应控制器的设计步骤8.3 小结第九章:现代控制理论在工程应用中的案例分析9.1 工业过程控制中的应用9.2 控制中的应用9.3 航空航天领域的应用9.4 小结第十章:总结与展望10.1 现代控制理论的主要成果与贡献10.2 现代控制理论的发展趋势10.3 面向未来的控制挑战与机遇10.4 小结重点和难点解析重点环节一:第二章中向量与矩阵、复数与复矩阵、拉普拉斯变换与Z变换的数学基础。