额定功率、额定转速和额定转矩 惯量和力矩
- 格式:docx
- 大小:24.04 KB
- 文档页数:2
【伺服电机基本三要素】1、转数N:根据客户实际要求,对于同等功率电机可选配不同转数电机,一般来说,转数越低,价格越便宜。
2、扭矩T:必须满足实际需要,但是不需要像步进电机那样留有过多的余量。
3、惯量J:根据现场要求选用不同惯量的电机,如机床行业一般选用大惯量的伺服电机。
【伺服电机功率基本计算】输出功率P = 0.1047*N*T式中N为旋转速度,T为扭矩。
旋转速度基本为3000转。
扭矩T = r*M*9.8式中r为轴半径,M为物体重量。
【伺服电机功率选择要点】电动机的功率,应根据生产机械所需要的功率来选择,尽量使电动机在额定负载下运行。
如果电动机功率选得过小,就会出现“小马拉大车”现象,造成电动机长期过载,使其绝缘因发热而损坏。
甚至电动机被烧毁。
如果电动机功率选得过大,就会出现“大马拉小车”现象,其输出机械功率不能得到充分利用,功率因数和效率都不高,不但对用户和电网不利。
而且还会造成电能浪费。
【伺服电机功率实际选型计算方法】1、要正确选择电动机的功率,必须经过以下计算或比较:功率P = F*V /1000 (P=计算功率KW,F=所需拉力N,V=工作机线速度M/S)2、对于恒定负载连续工作方式,可按下式计算所需电动机的功率:P1(kw):P=P/n1n2式中n1为生产机械的效率;n2为电动机的效率,即传动效率。
按该公式求出的功率P1,不一定与产品功率相同。
因此,所选电动机的额定功率应等于或稍大于计算所得的功率。
3、用类比法来选择电动机的功率:所谓类比法,就是与类似生产机械所用电动机的功率进行对比。
具体做法是:了解本单位或附近其他单位的类似生产机械使用多大功率的电动机,然后选用相近功率的电动机进行试车。
试车的目的是验证所选电动机与生产机械是否匹配。
验证的方法是:使电动机带动生产机械运转,用钳形电流表测量电动机的工作电流,将测得的电流与该电动机铭牌上标出的额定电流进行对比。
如果电功机的实际工作电流与铭脾上标出的额定电流上下相差不大。

力矩如何计算及实例(原创版)目录1.力矩的定义及作用2.力矩的计算方法3.力矩的实例应用4.结论正文力矩是物理学中的一个重要概念,它描述了力对物体产生转动作用的程度。
力矩的作用主要体现在改变物体的旋转运动状态,例如使物体加速旋转或者改变物体的旋转方向等。
本文将从力矩的定义及计算方法入手,结合实例应用,详细地介绍力矩的相关知识。
一、力矩的定义及作用力矩是一个矢量量,它的大小等于力乘以力臂,即 M=F×r。
其中,M 表示力矩,F 表示作用在物体上的力,r 表示力作用点到物体旋转轴的距离。
力矩的单位是牛顿米(N·m)或者千克米(kg·m)。
力矩的作用主要体现在改变物体的旋转运动状态。
例如,在机械传动系统中,力矩可以克服阻力、摩擦等因素,使机械设备顺利地进行旋转运动。
此外,力矩还可以用来衡量物体的负载能力,即物体在受到力的作用下能够承受的扭矩大小。
二、力矩的计算方法力矩的计算方法通常有两种:一种是根据定义直接计算,另一种是根据转动惯量计算。
1.根据定义直接计算根据力矩的定义,我们可以直接通过计算力与力臂的乘积来得到力矩。
具体地,假设有一个力 F 作用在距离旋转轴 r 的位置,那么该力的力矩M 就等于 F 乘以 r,即 M=F×r。
2.根据转动惯量计算另一种计算力矩的方法是根据转动惯量进行计算。
转动惯量是物体在受到力矩作用下产生旋转运动的惯性大小。
具体地,假设有一个圆柱形物体,其质量为 m,半径为 r,那么该物体的转动惯量 J 就等于 1/2×m×r。
当该物体受到一个力矩 M 的作用时,可以根据以下公式计算物体的角加速度α:M=J×α。
然后,可以根据物体的转动惯量和角加速度计算出物体的旋转速度ω:ω=α×r/3.14。
最后,可以根据旋转速度和力矩计算出物体受到的力 F:F=M/r。
三、力矩的实例应用力矩在实际应用中具有广泛的应用,下面我们通过一个具体的实例来说明力矩的计算方法。
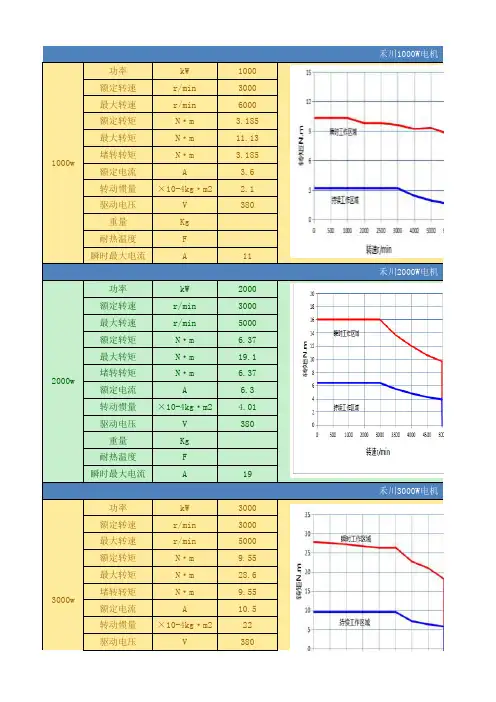
功率kW 1000额定转速r/min3000最大转速r/min6000额定转矩N·m 3.185最大转矩N·m11.13堵转转矩N·m 3.185额定电流A 3.6转动惯量×10-4kg·m2 2.1驱动电压V380
重量Kg
耐热温度F
瞬时最大电流A11
功率kW2000额定转速r/min3000最大转速r/min5000额定转矩N·m 6.37最大转矩N·m19.1堵转转矩N·m 6.37额定电流A 6.3转动惯量×10-4kg·m2 4.01驱动电压V380
重量Kg
耐热温度F
瞬时最大电流A19
功率kW3000额定转速r/min3000最大转速r/min5000额定转矩N·m9.55最大转矩N·m28.6堵转转矩N·m9.55额定电流A10.5转动惯量×10-4kg·m222驱动电压V380禾川1000W电机
3000w 禾川2000W电机
1000w
2000w
禾川3000W电机
重量Kg
耐热温度F
瞬时最大电流A32
功率kW5000额定转速r/min2000最大转速r/min4000额定转矩N·m23.9最大转矩N·m71.6堵转转矩N·m31额定电流A21转动惯量×10-4kg·m2166.6驱动电压V380
重量Kg
耐热温度F
瞬时最大电流A70禾川5000W电机
5000w。

埃斯顿伺服电机名词解释功率:表示电机在单位时间内,在一定的转速下,输出一定的转矩所做的功。
表达式如下:式中:P—机械功率(单位:W),n—转速(单位:转/分),T—转矩(单位:Nm)。
电机的机械输出功率和电机的转速、转矩紧密相关,指定功率时还必须要说明转速或转矩中任一个指标。
由于步进电机的输出转矩随转速的变化而变化,所以,步进电机没有一个确定的功率指标。
伺服驱动器对伺服电机采用矢量控制,伺服电机的转矩在零速~额定转速内,可以保持恒转矩输出,所以伺服电机有一个确定的功率指标——额定功率。
在伺服电机电气参数表中标明的功率,就是指电机在额定转速下保持一定转矩的机械输出功率。
(埃斯顿电机功率段200W-22KW)较为准确地描述伺服电机和步进电机的参数指标,是电机的转矩。
转矩:伺服电机和步进电机的转矩单位均为Nm,它表示电机出力的大小。
伺服电机的转矩可分为零速转矩和额定转矩二种。
零速转矩是仅对伺服电机而言。
当电机的转速升高时,由于电机的铁损、机械损耗等损耗增大,为了使电机的温升不超过允许值,电机在高速时的转矩会略有下降。
而电机铁损等损耗,与驱动器的PWM调制频率的高低、电流谐波等指标有相当大的关系。
所以,零速转矩是指,伺服电机在极低转速下,当相电流为额定电流时产生的转矩。
额定转矩是指在伺服电机相电流为额定电流时,电机运行在额定转速下产生的转矩。
由于伺服电机是闭环控制运行,在pn=0的控制方式下(矢量控制),电机转矩的大小与供给电机电流的大小成正比。
电机的转矩输出随负载的变化而变化,当负载恒定时,伺服电机的转矩输出也为恒定,并非电机转矩输出恒定不变。
所以,伺服电机恒转矩输出的含义,是指在此区域、此转矩下,电机的温升在允许值下可长期运行的转矩。
同时伺服电机可短时间的过载运行,过载倍数由驱动器输出的过载电流决定(埃斯顿电机过载倍数为3倍),过载时间由驱动器的容量及伺服电机的温升来决定。
步进电机的转矩有保持转矩和动态转矩二种。
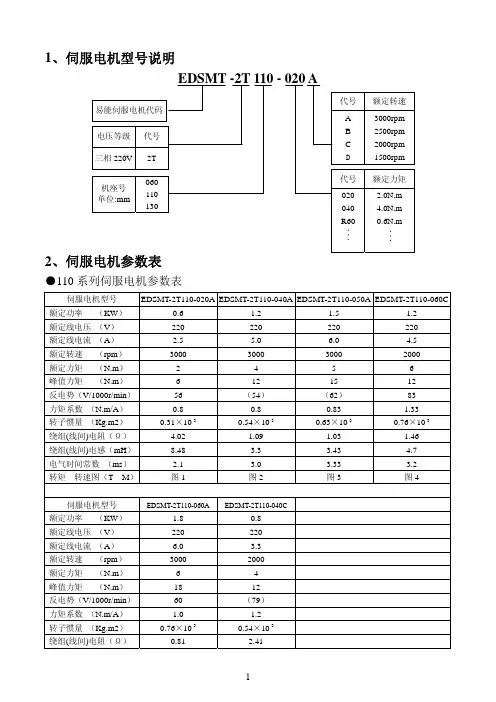
1、伺服电机型号说明2、伺服电机参数表●110系列伺服电机参数表EDSMT-2T110-060C 伺服电机型号 EDSMT-2T110-020A EDSMT-2T110-040A EDSMT-2T110-050A额定功率(KW)0.6 1.2 1.5 1.2 额定线电压(V)220 220 220 220 额定线电流(A) 2.5 5.0 6.0 4.5 额定转速(rpm)3000 3000 3000 2000 额定力矩(N.m) 2 4 5 6 峰值力矩(N.m) 6 12 15 12 反电势(V/1000r/min) 56 (54)(62) 83力矩系数(N.m/A) 0.8 0.8 0.83 1.33转子惯量(Kg.m2) 0.31×10-3 0.54×10-3 0.63×10-3 0.76×10-3绕组(线间)电阻(Ω) 4.02 1.09 1.03 1.46 绕组(线间)电感(mH)8.48 3.3 3.43 4.7 电气时间常数(ms) 2.1 3.0 3.33 3.2转矩—转速图(T—M)图1 图2 图3 图4伺服电机型号EDSMT-2T110-060A EDSMT-2T110-040C额定功率(KW) 1.8 0.8额定线电压(V) 220 220额定线电流(A) 6.0 3.3额定转速(rpm) 3000 2000额定力矩(N.m) 6 4峰值力矩(N.m) 18 12反电势(V/1000r/min) 60 (79)力矩系数(N.m/A) 1.0 1.2转子惯量(Kg.m2) 0.76×10-3 0.54×10-3绕组(线间)电阻(Ω) 0.81 2.41绕组(线间)电感(mH) 2.59 7.3电气时间常数(ms) 3.2 3转矩—转速图(T—M)图5 图编码器线数/(PPR) 2500F(155℃)电机绝缘等级 Class防护等级 IP65 使用环境环境温度: -20℃~ +50℃环境湿度:相对湿度<90%(不结霜条件)绕组引线 U V W PE电机绕组插座插座编号 2 3 4 1信号引线 5V 0V A+B+Z+A-B-Z-U+V+ W+ U- V-W-PE编码器插座插座编号234567891011121314151●130系列伺服电机参数表EDSMT-2T130-077B 伺服电机型号 EDSMT-2T130-040B EDSMT-2T130-050B EDSMT-2T130-060B额定功率(KW) 1.0 1.3 1.5 2.0额定线电压(V)220 220 220 220额定线电流(A) 4.0 5.0 6.0 7.5额定转速(rpm)2500 2500 2500 2500额定力矩(N.m) 4 5.0 6 7.7峰值力矩(N.m)12 15 18 22反电势(V/1000r/min)(69.3)68 65 68力矩系数(N.m/A) 1.0 1.0 1.0 1.03转子惯量(Kg.m2) 0.85×10-3 1.06×10-3 1.26×10-3 1.53×10-3绕组(线间)电阻(Ω) 2.76 1.84 1.21 1.01绕组(线间)电感(mH) 6.42 4.9 3.87 2.94电气时间常数(ms) 2.89 3.19 3.26 3.80转矩—转速图(T—M)图6 图7 图8 图9EDSMT-2T130-150B 伺服电机型号 EDSMT-2T130-100D EDSMT-2T130-100B EDSMT-2T130-150D额定功率(KW) 1.5 2.6 2.3 3.8额定线电压(V)220 220 220 220额定线电流(A) 6.0 10 9.5 17额定转速(rpm)1500 2500 1500 2500额定力矩(N.m)10 10 15 15峰值力矩(N.m)25 25 30 30反电势(V/1000r/min)103 70 114 67力矩系数(N.m/A) 1.67 1.0 1.58 0.88转子惯量(Kg.m2) 1.94×10-3 1.94×10-3 2.77×10-3 2.77×10-3绕组(线间)电阻(Ω) 1.29 0.73 1.1 0.49绕组(线间)电感(mH) 5.07 2.45 4.45 1.68电气时间常数(ms) 3.93 3.64 4.45 4.02转矩—转速图(T—M)图10 图11 图12 图13编码器线数/(PPR) 2500 电机绝缘等级 Class F (155℃) 防护等级 IP65使用环境 环境温度: -20 ℃~ +50℃ 环境湿度:相对湿度<90%(不结霜条件) 绕组引线 U V W PE 电机绕组插座 插座编号 2 34 1 信号引线 5V 0V A+B+Z+A-B-Z-U+V+ W+ U- V-W-PE 编码器插座插座编号234567891011121314151110/130系列伺服电机安装尺寸110系列 130系列 10 15额定转矩(N ·m)2 4 5 6 4 5 6 7.71500 2500 15002500LA 159 189 204 219 166 171 179 192 213 209 241 231 LB 55 55 55 55 57 57 57 57 57 57 LC 5 5 5 5 5 5 5 5 5 5 LD 12 12 12 12 14 14 14 14 14 14 LE 95 95 95 95 110 110 110 110 110 110 LF 110 110 110 110 130 130 130 130 130 130 LG 130 130 130 130 145 145 145 145 145 145 LZ 9 9 9 9 9 9 9 9 9 9 S 19 19 19 19 22 22 22 222222注:抱闸为8N.m;Dc99V。
“旺材电机与电控”提醒您不要走开,文末有福利!在伺服系统选型及调试中,常会碰到惯量问题。
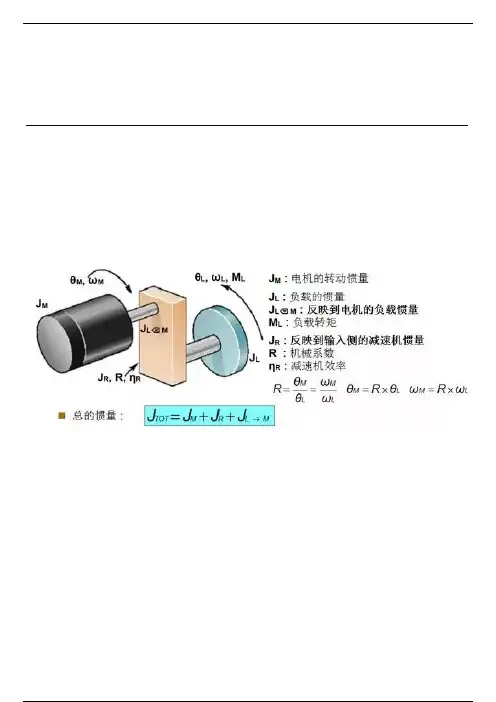
其具体表现为:在伺服系统选型时,除考虑电机的 扭矩和额定速度等等因素外,我们还需要先计算得知机械系统换算到电机轴的惯量,再根据机械的实际动作要求及加工件质量要求来具体选择具有合适惯量大小的电机;在调试时,正确设定惯量比参数是充分发挥机械及伺服系统最佳效能的前提。
此点在要求高速高精度的系统上表现尤为突出,这样,就有了惯量匹配的问题。
一、什么是“惯量匹配”?1、根据牛顿第二定律:“进给系统所需力矩T = 系统传动惯量J × 角加速度θ角”。
加速度θ影响系统的动态特性,θ越小,则由控制器发出指令到系统执行完毕的时间越长,系统反应越慢。
如果θ变化,则系统反应将忽快忽慢,影响加工精度。
由于马达选定后最大输出T值不变,如果希望θ的变化小,则J应该尽量小。
2、进给轴的总惯量“J=伺服电机的旋转惯性动量JM + 电机轴换算的负载惯性动量JL 。
负载惯量JL由(以平面金切机床为例)工作台及上面装的夹具和工件、螺杆、联轴器等直线和旋转运动件的惯量折合到马达轴上的惯量组成。
JM为伺服电机转子惯量,伺服电机选定后,此值就为定值,而JL则随工件等负载改变而变化。
如果希望J变化率小些,则最好使JL所占比例小些。
这就是通俗意义上的“惯量匹配”。
二、“惯量匹配”如何确定?传动惯量对伺服系统的精度,稳定性,动态响应都有影响。
惯量大,系统的机械常数大,响应慢,会使系统的固有频率下降,容易产生谐振,因而限制了伺服带宽,影响了伺服精度和响应速度,惯量的适当增大只有在改善低速爬行时有利,因此,机械设计时在不影响系统刚度的条件下,应尽量减小惯量。
衡量机械系统的动态特性时,惯量越小,系统的动态特性反应越好;惯量越大,马达的负载也就越大,越难控制,但机械系统的惯量需和马达惯量相匹配才行。
不同的机构,对惯量匹配原则有不同的选择,且有不同的作用表现。
电机扭矩计算电机力矩的定义:垂直方向的力*到旋转中心的距离1 、电动机有一个共同的公式:P=M*N/9550P 为功率,M 为电机力矩〔也称扭矩〕,N 为电机转速,当M 和N 都为额定值时,电机的功率也是额定功率,额定是指电机能够长期工作的极限值2、瞬态扭矩是指电机在负载变化、速度变化时出现的过渡值,和额定没有关系,具体说,这个值可以超过额定扭矩,如果此时电机速度为额定时,电机可能会出现功率过载,这个过载只能持续很短的时间,这个时间取决于电机设计。
3、变频器的功率一般要大于等于三相异步电动机,但这还不够,还需要变频器输出的额定电流和过载电流都要大于等于电机所需的额定值或最大值,以保证电机能出足够的力矩〔额定和瞬态力矩〕,否那么可能出现变频器无法带动电机和负载的情况。
步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。
每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。
步进电机惯量低、定位精度高、无累积误差、控制简单等特点。
广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。
而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可靠。
在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。
一般地说最大静力矩Mjmax 大的电机,负载力矩大。
选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。
在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。
但细分只能改变其分辨率,不改变其精度。
精度是由电机的固有特性所决定。
选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。
物理量物理学中量度物体属性或描述物体运动状态及其变化过程的量。
说明它们通过物理定律及其方程建立相互间的关系。
它们中有的有方向,有的无方向;有的有量纲(见量纲分析)、单位,有的无量纲、单位;有的描述状态,有的描述过程;有的和质量成正比,有的和质量无关;有的规定为互相独立的基本量,有的是从前者导出的导出量;有的是变量,有的是常量,其中普适性强的称基本物理常量。
无方向的物理量称标量,有方向的称矢量(有3个分量)和张量(有9个分量)。
直接描述物体和物质(包括场)的状态的物理量如力学中描述机械运动状态的速度、加速度、动量、动能、势能,热学中描述物态的压力、体积温度、内能,电磁学中描述电磁场电场强度、电势、磁感应强度等称状态量,中国物理学界称直接描述状态变化过程的物理量如冲量、功、热量等为过程量。
这些量只存在于过程中,体现为动量、机械能和内能的不断变化,过程完成后,这些量就不复存在。
热学中将和质量成正比的状态量如体积、内能、热容等称广延量;而将它们对质量的比值,如比容、比内能、比热容,称强度量;其他的一些与质量无关的状态量,如温度、压力也称强度量。
注在物理学中,为了区别物理量和单位的符号,物理量的符号,除标准大气压atm为正体外,其他为斜体,物理量的单位的符号一律为正体。
力矩在物理学里,力矩是一个向量,可以被想象为一个旋转力或角力,导致出旋转运动的改变。
这个力定义为线型力叉乘径长。
依照国际单位制,力矩的单位是牛顿-米。
而依照英制单位,测量的单位则为英尺-镑。
力矩希腊字母是tau。
力矩不代表转矩。
力矩的概念,起源于阿基米德对杠杆的研究。
定义力矩(torque):力(F)和力臂(L)的叉乘(M)。
物理学上指使物体转动的力乘以到转轴的距离[1]。
即:M=L×F。
其中L是从转动轴到着力点的矢量, F是矢量力;力矩也是矢量。
力矩的量纲是距离×力;与能量的量纲相同。
但是力矩通常用牛顿-米,而不是用焦耳作为单位。
启动转矩,指的是电机刚通电还没有转起来的时候电机轴输出的扭矩,因为电机刚通电的时候,电流比正常工作的时候大,所以这时候扭矩也比较大。
额定转矩,指的是电机正常工作时候的扭矩,这个时候,电机的电压、电流、负载都是额定的。
额定的意思就是说,设计人员在设计的时候规定电机在什么情况下工作。
电机的启动转矩与额定转矩之比在1.2~2.0之间。
这句话的意思是,电机在启动的时候的扭矩值除以正常工作时候的扭矩值所得的商的范围是1.2~2.0。
影响启动转矩的原因有电源的电压,负载等当给处于停止状态下的异步电动机加上电压时的瞬间,异步电动机产生的转矩称为启动转矩。
通常启动转矩为工作转矩的1.25~5倍之间。
具体与电机的工作状态有关。
额定转矩:在额定电压、额定负载下,电动机转轴上产生的电磁转矩称为电动机的额定转矩。
启动转矩:当给处于停止状态下的异步电动机加上电压时的瞬间,异步电动机产生的转矩称为起动转矩。
启动转矩表征了电动机的启动能力,它与启动方式有关(如星三角起动,变频调速起动等),直接起动鼠笼式一般为额定力矩的0.8到2.2倍。
通常起动转矩为额定转矩的125%以上。
与之对应的电流称为起动电流,通常该电流为额定电流的6倍左右。
对于直流电机来说,这个启动转矩特别大,所以启动电流也就很大,故而不能直接启动,当然这是对于大型直流电机而言,小型的直流电机包括永磁的都是例外。
对于交流电机来说这个转矩就不是很大了,所以电流也不是很大,可以直接启动,当然交流电机启动转矩小所以不能带载启动。
最大转矩:电动机转矩从稳定区进入不稳定区的交界点。
也就是说,如果负载转矩大于电动机的最大转矩,电动机的输出转矩会变小,并进入堵转状态。
堵转转矩:进入堵转状态后,转速为零,这时电动机能够输出的转矩为堵转转矩。
静转矩:电机通电但未转动时,定子锁住转子的力矩。
堵转转矩实际上是指电机的最大转矩,对应电机的转速为零,电流最大时的转矩。
满载转矩:实际上是指额定转矩,即指电机在额定电压额定电流下的转矩。
1.第四关节a)第四关节直流电机直流电机采用MAXON电机,型号为DCX 19 S。
电机工作参数如表1-1所示:表1-1电机工作参数表b)行星齿轮减速器行星齿轮减速器采用MAXON电机配套的行星齿轮减速器,型号为GPX 19 。
行星齿轮减速器工作参数如表1-2所示:表1-2行星齿轮减速器工作参数表c)谐波齿轮减速器谐波齿轮减速器采用Nidec(日本电产新宝浙江有限公司)谐波齿轮减速器,型号为WPU-35-50-SNH,谐波齿轮减速器工作参数如表1-3所示:表1-3谐波齿轮减速器工作参数表(d)回转转矩校核绕X 轴旋转机构的能够达到的最大回转转矩为:M T T =1G i G ηH i H η=Nm 9.4式中 M T ——直流电机的最大回转转矩;M T =11.1mNm G i ——行星齿轮减速器的减速比;G i =16 G η——行星齿轮减速器的工作效率;G η=0.8 H i ——谐波齿轮减速器的减速比;H i =50H η——谐波齿轮减速器的工作效率;H η=0.72.超声波a ) 超声波钻电机直流电机采用MAXON 电机,型号为DCX 16 S 。
电机工作参数如表2-1所示:表2-1电机工作参数表b ) 行星齿轮减速器行星齿轮减速器采用MAXON 电机配套的行星齿轮减速器,型号为GPX 19 。
行星齿轮减速器工作参数如表2-2所示:表 2-2行星齿轮减速器工作参数表(c )回转转矩校核绕X 轴旋转机构的能够达到的最大回转转矩为:M T T =1G i G η=Nm 2.0式中 M T ——直流电机的最大回转转矩;M T =4.95mNm G i ——行星齿轮减速器的减速比;G i =62 G η——行星齿轮减速器的工作效率;G η=0.653.滚珠丝杠直线运动系统选用THK 公司生产。
型号为BNK0601-3G0+130LC3Y M 。
支撑座型号为EK5。
滚珠丝杠规格如表3-1所示:表3-1滚珠丝杠获得所需推力的扭矩 T=Fa ●Ph/2ᴨ●Ƞ1 T :驱动扭矩Fa :导向面上的摩擦阻力 Fa=µ×mgµ:导向面上的摩擦系数 g :重力加速度 m :运送物的质量 Ph :进给丝杠的导程 Ƞ1:进给丝杠的正效率 Fa=9.8×2=19.6T=19.6×1/2×3.14×0.8=3.9Nmm 施加扭矩时施加的推力 Fa=2ᴨ●Ƞ1●T/Ph Fa :施加的推力 T:驱动扭矩Ph :进给丝杠的导程 Ƞ1:进给丝杠的正效率推力N 1155100023.014.38.02Fa =⨯⨯⨯⨯=4.直线导轨直线导轨选用台湾上银,型号:MGN5C 。
LB系列机座号(mm):80、110、130、150额定转矩(Nm):1.3~27额定功率(Kw):0.4~5.5额定转速(rpm):1500、2000、2500、3000最高转速(rpm):/转子惯量:中惯量标配反馈元件:增量式编码器(2500C/T)失电制动器:可配适配驱动器工作电压(VAC):220LBB系列机座号(mm):80、110、130、150额定转矩(Nm):1.3~19.1额定功率(Kw):0.4~3.0额定转速(rpm):1500、2000、3000最高转速(rpm):3000、5000转子惯量:中惯量标配反馈元件:总线式光电编码器失电制动器:可配适配驱动器工作电压(VAC):220HB系列机座号(mm):110、130、150额定转矩(Nm):2~27额定功率(Kw):0.6~5.5额定转速(rpm):1500、2000、2500、3000最高转速(rpm):/转子惯量:中惯量标配反馈元件:增量式编码器(2500C/T)失电制动器:可配适配驱动器工作电压(VAC):380HBB系列机座号(mm):110、130、150额定转矩(Nm):2.4~28.7额定功率(Kw):0.4~5.5额定转速(rpm):1500、2000最高转速(rpm):3000转子惯量:中惯量标配反馈元件:总线式光电编码器失电制动器:可配适配驱动器工作电压(VAC):380请您关注以下伺服电机为自冷式散热方式,安装时请选择足够大的安装板。
伺服电机长期工作,机体本身会有一定的温度,这是正常情况。
装配了失电制动器的伺服电机,其失电制动器的电源必须由驱动器控制开闭,否则会造成工作状态不佳。
伺服电机内装精密反馈元件,严禁重力敲击电机轴伸端及后部。
请注意电机轴伸端的最大径、轴向力的限值。
严禁随意更改、拆装及加工电机部件。
请您将需求告之我们,我们来为您服务。
电机电联接器转矩转速曲线示意图LB 、HB系列 LBB 、HBB 系列LB、LBB 、HB 、HBB 系列伺服电机的Mmax=3Mn ;Mmax 输出状态为短时工作。
转动惯量就相当于F=am当中的m!惯性转矩相当于vXm(冲量)转动惯量乘以角加速度等于惯性转矩,就是加速转矩。
转动惯量和转矩没有关系的。
转动惯量单位kgm^2,简单的说和旋转物的密度和形状有关;转矩单位Nm,是施加力的大小和力臂的乘积,与被施力物体无关。
如果说互相之间的联系,从能量的角度可找到相关的东西转动惯量和动能的关系:E=(1/2)Jw^2,J是旋转惯量,w是旋转角速度;转矩与做功的关系:A=(1/2)Mwt,M是转矩,w是旋转角速度,t是力矩施加时间。
当转动动能E=转矩做功A时,由以上公式可以得出:M=Kw/t 这个公式是在理想状态下得到的,限制条件:对一静止物质施加一个恒定转矩M,物质由角速度0经过时间t后加速到角速度w“小惯量的系统,启动,加速,制动的性能好,反应快”。
是因为本身电机转子惯量小,小惯量可以带动的负载惯量的倍数有的可以达到20倍甚至30倍的转子惯量,具体选型都有参数限制,同功率的小惯量的电机额定输出转矩会比中惯量、大惯量要小很多,那为什么它的反应还会快呢?因为它总拖动的惯量(=电机转子惯量+负载惯量)比中惯量、大惯量也同样小的多。
力=质量*加速度。
惯量正比于质量。
为什么额定转速还会高呢?额定功率(W)=额定转速(转/分钟)*额定转矩(Nm)*2π/60。
小惯量的额定转矩低,所以额定转速高。
至于小惯量反应快的前提就是它必须拖带惯量和它匹配的惯量也很小的负载,惯量大了它就拖动不动了。
如果同功率的大小惯量两种伺服电机拖动负载后总的惯量(转子惯量+负载惯量)完全一样,并且两套系统都在大惯量额定转速范围内工作(譬如1500转/分钟或1000转/分钟)时,小惯量的反应快的特点就不存在了。
当然这样用大惯量伺服未免有点大马拉小车。
为什么小惯量的伺服电机无法做的功率很大呢,是因为功率大了以后转矩要求加大,转子的机械结构无法继续保持转子惯量小的特点了,所以功率大的伺服都是转子惯量大的了。
额定功率、额定转速和额定转矩惯量和力矩
额定功率P、额定转速N和额定转矩T:
转矩T可以从功率P和转速N算得:
公式说明,同一功率下,转矩和转速成反比,即使用减速箱放大输出转矩时,同时会减少转速。
从力的做功角度,得推导过程如下:
其中:
F为电机输出合力,单位为N(牛);
r为力臂,单位为m(米);
N为电机转速,单位为RPM(转/分)。
我们知道,转矩T的定义是力(F)乘以力臂(r),即:
故,把上式代入可得:
其中:
P为电机额定功率,单位为W;
T为电机额定转矩,单位为N·m;
N为电机额定转速,单位为RPM。
惯量和力矩的关系:
电机有小惯量、中惯量和大惯量之分,同一功率下,电机转动惯量J越大,
则电机的输出转矩越大,但速度越低。
故,小惯量电机有响应速度快的优点,
当然,这前提是其所拖负载的惯量不能太大。
惯量的单位为Kgm2,其定义如下,从能量角度:
由于式中质量和半径对于特定对象,是不变的,所以把它们提取出来,便成
为了惯量J:
从做功的角度分析,电机输出转矩做功W为:
理想下,电机转矩做功全部转化为功能,得:
故得:
即:
其中:
T为转矩,单位为N·m;
J为总惯量,单位为Kgm2;
β为角加速度,单位为rad/s2;
从式中可得到,惯量和加速度有直接关系,在特定应用场合,如果负载惯量恒定且已知,则可从要求的加速要求算出电机的输出转矩,作为电机选型的参数之一。
总结
关于电机的额定功率、额定转矩、额定转速、转动惯量,如果为一电机安装减速箱,则电机的安额定功率不变,额定转矩增大、额定转速减少、转动惯量增大。
所以,为一系统选择电机,需要知道系统的负载惯量、要求的最大转速、要求的最大加/减速时间、系统电压等要求、从而算出一系列的电机参数,再进行电机选型,从而既能满足系统要求又不构成浪费。