第2章 感应电动机的数学模型
- 格式:pdf
- 大小:159.54 KB
- 文档页数:6
第二讲三相交流感应发电机的数学模型三相交流异步发电机是一种通过定、转子绕组间的电磁耦合来实现机械能-电能的能量转换装置。
研究三相交流异步发电机的电磁关系是了解三相交流发电机运行问题的理论基础,为风电机组联网运行分析奠定理论基础,对解决风电机组联网运行问题具有重要的意义。
2.1 abc坐标下的有名值方程2.1.1理想电机为了便于定量分析三相交流电机的能量转换过程,本节基于理想电机假设,建立了三相交流异步电机的数学模型,即假设:1)电机铁心的导磁系数为常数,即忽略铁心磁饱和、磁滞的影响,也不计涡流及集肤作用等的影响;2)对纵轴及横轴而言,电机转子在结构上是完全对称的,即电机磁路在空间上完全对称;3)定(转)子三个绕组的位置在空间上互相相差120°电角度,三个绕组在结构上完全相同;4)定子绕组和转子绕组均在气隙空间中产生正弦分布的磁动势;5)只考虑气隙基波磁场的作用;6)电机定、转子表面光滑。
在此基础上,对定、转子绕组回路电压电流正方向、定、转子电流与磁链正方向等做如下规定:1)定子绕组电压、电流正方向遵循发电机惯例;2)转子绕组电压、电流正方向遵循电动机惯例;3)定子负值电流产生正值磁链;转子正值电流产生正值磁链。
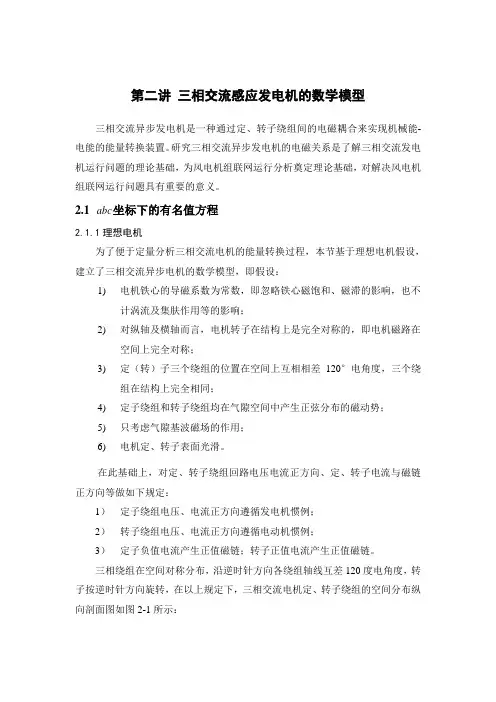
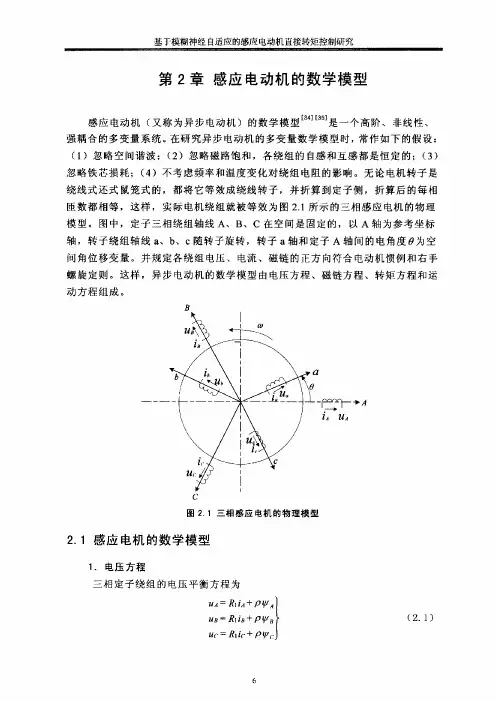
三相绕组在空间对称分布,沿逆时针方向各绕组轴线互差120度电角度,转子按逆时针方向旋转,在以上规定下,三相交流电机定、转子绕组的空间分布纵向剖面图如图2-1所示:sQsCsB 'sAsBsA 'sC 'sDra 'rb 'rc 'rarbrcβr αr θr······rω1ω图2-1 三相交流电机定、转子绕组空间分布纵向剖面示意图图中:sA 和sA ’、sB 和sB ’、sC 和sC’分别表示A 、B 、C 三相定子绕组;ra 和ra ’、rb 和rb ’、rc 和rc ’分别表示a 、b 、c 三相转子绕组;定子A 相绕组轴线正方向为空间位置参考方向即sD 轴,转子绕组a 相轴线即r α轴超前sD 轴θr 电角度。
/djx/TMP/现代交流调速技术课件.rar感应电动机变频调速系统⏹VVVF开环调速系统⏹sf闭环变频调速系统⏹矢量控制变频调速系统⏹直接力矩控制调速系统平均力矩控制瞬态力矩控制感应电动机变频调速(induction motor)⏹VVVF开环调速系统⏹sf闭环变频调速系统⏹矢量控制变频调速系统⏹直接力矩控制调速系统平均力矩控制瞬态力矩控制vector control§4-2矢量控制变频调速系统一,背景知识电机统一理论机电能量变换--坐标变换感应电机数学模型(第二章)1.电机的磁场能量单绕组磁能am W id ψψ=⎰磁共能'0aI mW diψ=⎰Liψ='212m maLI W W ==1.电机的磁场能量双绕组121122a a m W i d i d ψψψψ+=⎰⎰111222i L M L i M ψψ⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦[]11'122212m m i L M i i L i M W W ⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦1222121122a a L I L I =+12a a MI I +一般化(n 绕组)1111211221222212nn n n n n n n L L L i L L L i L L L i ψψψ∙∙∙⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥∙∙∙⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥∙∙∙∙∙∙∙∙=⎢⎥⎢⎥⎢⎥∙∙∙∙∙∙∙∙⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥∙∙∙∙∙∙∙∙⎢⎥⎢⎥⎢⎥∙∙∙⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦Li=ψ12t m W W =i Li 'm=1.电机的磁场能量2.电机的电磁转矩memCW T ψα=∂=-∂'memi CW T α=∂=∂12tW =i Li'm12t t em 1T =p 2αθ∂∂=∂∂L L i i i i p θα=3,感应电机数学模型(§2-4)22cos ψI K T m T em Φ=⎥⎦⎤⎢⎣⎡=rr rs sr ss L L L L L ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+---+---+=σσσs m m mm s m mm m s m ss L L L LL L L L L L L L L 111111111212121212121⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+---+---+=σσσR m m m m R m mm m R m rr L L L LL L L L L L L L L 222222222212121212121⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--++-==θθθθθθθθθcos )cos()cos()cos(cos )cos()cos()cos(cos 12012012012012012012L L L T sr rs •电磁转矩:•电感矩阵:6×6的电感矩阵!4, 电机等效模型fF ˆa Fˆ1F ˆ2F ˆ坐标变换入手简化电机的数学模型!交流电机的旋转磁场1. 旋转磁场的形成条件:三相对称的交流绕组通入三相对称的交流电流原因:产生圆形旋转磁势扩展:m相对称的交流绕组通入m相对称的交流电流坐标变换入手简化IM电机的数学模型!5,综合矢量和坐标变换ABi Ai •电流综合矢量Ii i i i I AC B A 122232-=++=cos)(ξBCξIˆCi ⎪⎩⎪⎨⎧-=-==)240si n()120si n(si n O CO B A t I i t I i t I i ωωωt j j IeIe I ωξ==ˆ综合矢量(空间量)•三相-二相(Clark 变换)1I ˆ1I ˆ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡C BA i i i i i i 2121212323021211320βα3/2变换矩阵⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡01232112321101i i i i i i C B A βα3/2逆变换矩阵物理概念?Clark 变换Clark 反变换•2S/2r 变换(Park 变换)ξβi qi ⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡βαθθθθi i i i q d cos sin sin cos ⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡q d i i i i θθθθβαcos sin sin cos 2S/2r 变换矩阵2r/2S 变换逆矩阵αβdqθIˆαi di 旋转磁场Park 变换Park 反变换6,d -q 旋转坐标系的IM 数学模型⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡221122110000000q d q d r r s s q d q d i i i i L ML M M L M L ψψψψ)(212123q d d q n e i i i i M p T -=•磁链方程•电压方程⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+----+--+--+=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡221122211122111111111112211q d q d R R R R q d q d i i i i pL R L pMMM pL R MpM pMMpL R L MpML pL R u u u u )()()()(ωωωωωωωωωωωω•电磁转矩1,M 、T 坐标系的数学模型--转子磁场定向2ψˆ∑ψˆ2ψˆ1ˆψ二,矢量控制的思路2,IM 电机磁场定向方法⏹转子磁链定向⏹气隙磁链定向⏹定子磁链定向⎪⎪⎩⎪⎪⎨⎧====000222222θψψψψψp p T T T M 2ψˆ∑ψˆ1ˆψ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡221122110000000q d q d r r s sq d q d i i i i L ML M M L M L ψψψψ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡2211221121100000000T M T M M T M i i i i L ML M M L M L ψψψ2ψˆ3,M -T 坐标系的IM 电机数学模型⎪⎪⎩⎪⎪⎨⎧====000222222θψψψψψp p T T T M 21223ψT n e i L M p T =)(212123q d d q n e i i i i M p T -=•电压方程⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+----+--+--+=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡221122211122111111111112211q d q d R R R R q d q d i i i i pL R L pM MM pL R M pM pM M pL R L M pM L pL R u u u u )()()()(ωωωωωωωωωωωω•电磁转矩⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+--++--+=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡2211222112211111111112211000T M T M R R T M T M i i i i pL R L MpL R pM pM MpL R LM pML pL R u u u u )()(ωωωωωωωω三,感应电机的等效直流电动机模型21223ψT n e i L Mp T =1221M i p T M+=ψ1212123M T n e i p T M i L M p T +=2ˆψ1I 实现感应电机定子电流的解耦控制,等效为直流电动机的模型!1M i 1T i三,感应电机的等效直流电动机模型1212123MTneipTMiLMpT+=1,矢量控制系统的构想1212123M T n e i p T M i L M p T +=2,矢量控制及其解耦⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+--++--+=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡2211222112211111111111100000T M T M R R T M i i i i pL R L MpL R pM pM M pL R L M pM L pL R u u )()(ωωωωωωωωdtd J p T T n Le ω+=1212123M T n e i p T M i L M p T += 异步电机坐标变换等效直流电机磁场定向3,IM 矢量变换与解耦数学模型21223ψT n e i L M p T =1221M i p T M +=ψdtd J p T T n Le ω+=1212123M T n e i p T M i L M p T +=四,IM的矢量控制系统的结构GΦF五,转子磁链观测器*电压模型法(根据定于电流和定子电压的检测值估算) *电流模型法(根据定子电流和转速检测值估算)*组合模型法(电压、电流模型相结合的方法)*改进电压模型法(加补偿器)*旋转坐标系下转子磁链观测模型*基于误差反馈的转子磁链观测器*基于龙贝格全阶状态观测器*基于遗传算法的转子磁链观测器*基于神经网络自适应的转子磁链观测器1,电压模型观测器⎰⎰--=--=])([])([11111221111122ββββαααασψσψi L dt i R u M L i L dt i R u M L 其中2121L L M -=σ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+--+++=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡2211222222111111000000βαβαβαωωωωi i i i pL R L Mp M L pL R M Mp Mp pL R Mp pL R u u1,电压模型观测器优点①算法简单②算法中不含转子电阻,因此受电机参数变化影响小③不需转速信息,这对于无速度传感器系统颇具吸引力缺点:①低速时,随着定子电阻压降作用明显,测量误差淹没了反电动势,使得观测精度较低②纯积分环节的误差积累和漂移问题严重,可能导致系统失稳2,电流模型观测器)(11)(112212222122ωψψωψψαβββααT Mi pT T Mi p T -+=-+=T 2为转子时间常数⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+--+++=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡2211222222111111000000βαβαβαωωωωi i i i pL R L Mp M L pL R M Mp Mp pL R Mp pL R u u2,电流模型观测器:优点不含纯积分项,其观测值是渐近收敛缺点:使用了角速度作为其输入信息转子时间常数T2综合考虑各种方法的优缺点,结合电压模型和电流模型各自的优点,在设计中采用电压电流模型结合的方法:)(11)(1)(11)(1212112212112电流模型电压模型电流模型电压模型βββαααψψψψψψ+++=+++=T T T T T T 即在高速时让电压模型起作用,通过低通滤波器将电流模型的观测值滤掉;在低速时让电流模型起作用.通过高通滤波器将电压模型观测值滤掉3,组合模型法⏹综合矢量。
第14卷 第10期2010年10月电 机 与 控 制 学 报ELE CTR IC M ACH I NE S AND CONTROLVo l 14No 10Oc.t 2010感应电机双滑模面变结构MRAS 转速辨识王庆龙1, 张兴2(1.合肥学院电子信息与电气工程系,安徽合肥230601;2.合肥工业大学电气与自动化工程学院,安徽合肥230009)摘 要:为了研究感应电机无速度传感器磁场定向控制系统,基于变结构控制和自适应控制理论,提出一种双滑模面变结构模型参考自适应观测器,用于感应电机的转速辨识。
该方法将变结构和模型参考自适应系统进行有机的整合,选择转子磁链电压模型和电流模型分别作为参考模型和可调模型,采用两模型输出的偏差构造了两个滑模面,利用代数计算方法获得转子估计速度。
理论分析和仿真结果表明:所提出的感应电机转速辨识方法具有较高的转子磁链观测准确度,改善了转速估计的动静态性能;对于参数变化具有很强的自适应能力,同时算法简单,适用于实时应用。
关键词:感应电机;无速度传感器;矢量控制;模型参考自适应;双滑模面;变结构;辨识中图分类号:TM 346+.2文献标志码:A文章编号:1007-449X (2010)10-0032-05Double m anifol d variable structureMRAS s peedi dentification for i nduction motorWANG Q ing long 1, Z HANG X ing2(1.Depart m ent of E l ec tron i cs and E l ectrical Eng i nee ri ng ,H efe iU n i versity ,H efe i 230601,Ch i na ;2.Co llege of E l ectrical and Au t om atic Eng i neering ,H e fei Un i v ers it y o f T echno logy ,H e fe i 230009,Ch i na)Abst ract :A novel strategy of doub le m anifold variab le structure m ode l reference adapti v e syste m (VSMRAS)observers for the speed identificati o n o f a senso rless field oriented vector contro lled i n duction m o to r dri v es w as presented.Th is observers co m bined MRAS w ith variable str ucture contro,l selected the vo ltage mode l o f rotor fluxes as the reference m ode l and the currentm ode l of rotor fluxes as the adj u stable m ode,l and for m ulated doub le m anifold accor d i n g the ou t p ut errors o f t w o m odels .In the presented ob ser vers ,t h e speed w as esti m a ted by algebraic .Theoretical ana l y sis and si m ulation resu lts show that the presented observers possesses t h e verac ity of fl u xes observers and i m proves the dyna m ic and static per fo r m ance of t h e speed esti m ation .It see m s very robust to variab le para m eters and less co m putational co m p lex ity ,and is suitab l e for rea l ti m e app lication .K ey w ords :i n duction m otors ;speed sensorless ;vector contro;l m odel re ference adapti v e syste m;doub le m an if o ld ;variable structure ;identification收稿日期:2010-03-21基金项目:安徽省高等学校省级自然科学基金(KJ2008B121)作者简介:王庆龙(1968 ),男,博士,副教授,研究方向为电力电子与电力传动、风力发电等;张 兴(1963 ),男,博士,教授,博士生导师,研究方向为电力电子与电力传动、风力发电、太阳能发电等。
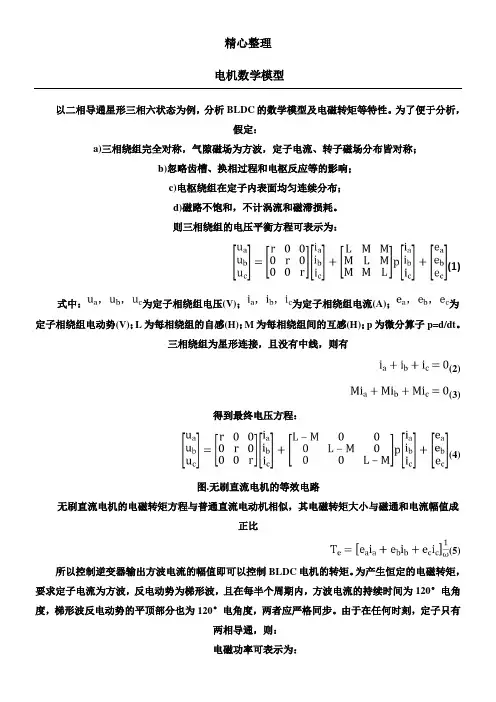
电机数学模型以二相导通星形三相六状态为例,分析BLDC的数学模型及电磁转矩等特性。
为了便于分析,假定:a)三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称;b)忽略齿槽、换相过程和电枢反应等的影响;c)电枢绕组在定子内表面均匀连续分布;d)磁路不饱和,不计涡流和磁滞损耗。
则三相绕组的电压平衡方程可表示为:(1)式中:为定子相绕组电压(V);为定子相绕组电流(A);为定子相绕组电动势(V);L为每相绕组的自感(H);M为每相绕组间的互感(H);p为微分算子p=d/dt。
三相绕组为星形连接,且没有中线,则有(2)(3)得到最终电压方程:(4)图.无刷直流电机的等效电路无刷直流电机的电磁转矩方程与普通直流电动机相似,其电磁转矩大小与磁通和电流幅值成正比(5)所以控制逆变器输出方波电流的幅值即可以控制BLDC电机的转矩。
为产生恒定的电磁转矩,要求定子电流为方波,反电动势为梯形波,且在每半个周期内,方波电流的持续时间为120°电角度,梯形波反电动势的平顶部分也为120°电角度,两者应严格同步。
由于在任何时刻,定子只有两相导通,则:电磁功率可表示为:(6)电磁转矩又可表示为:(7)无刷直流电机的运动方程为:(8)其中为电磁转矩;为负载转矩;B为阻尼系数;为电机机械转速;J为电机的转动惯量。
传递函数:无刷直流电机的运行特性和传统直流电机基本相同,其动态结构图可以采用直流电机通用的动态结构图,如图所示:图2.无刷直流电机动态结构图由无刷直流电机动态结构图可求得其传递函数为:式中:K1为电动势传递系数,,Ce为电动势系数;K2为转矩传递函数,,R为电动机内阻,Ct为转矩系数;T m为电机时间常数,,G为转子重量,D为转子直径。
基于MATLAB的BLDC系统模型的建立在Matlab中进行BLDC建模仿真方法的研究已受到广泛关注,已有提出采用节点电流法对电机控制系统进行分析,通过列写m文件,建立BLDC仿真模型,这种方法实质上是一种整体分析法,因而这一模型基础上修改控制算法或添加、删除闭环就显得很不方便;为了克服这一不足,提出在Matlab/Simulink中构造独立的功能模块,通过模块组合进行BLDC建模,这一方法可观性好,在原有建模的基础上添加、删除闭环或改变控制策略都十分便捷,但该方法采用快速傅立叶变换(FFT)方法求取反电动势,使得仿真速度受限制。


第2章永磁同步电机的结构特点及数学模型2.1 永磁同步电机概述电机是一种机电能量转换或信号转换的电磁机械装置。
自1831年电磁感应定律为人们所知,人们发现可以利用磁场将电能与机械能进行相互转化,由此发明了电机。
随着不同种类的电机相继出现,大力推动了电气工程行业及电力电子工业的发展。
众所周知,要于电机之内建立所需的磁场,一种方式是可以通过在电机内部对电机绕组通以电流产生磁场,需要持续的提供电能维持磁场存在,磁场强度取决于电机内部的电流及绕组的结构。
另一种可以通过永磁体产生磁场,由于永磁材料的固有特性故不再需要提供其他外在能量便可以持续维持磁场存在,因此采用永磁材料产生磁场可以使电机在自身结构上更为简单,其运行的安全程度和效率也随之提高。
起初人们并未发现可用于建立磁场的较为合适的材料,因此人们利用天然的磁铁矿石制成永磁材料,并在19世纪20年代制成世界上第一台永磁电机。
但由于天然磁铁矿石的磁性较低,因此为了满足磁场需求,制成的电机体积庞大,性能较差,并不能达到人们在工业等相关领域的要求。
直到1845年,英国的惠斯通用电磁铁代替永久磁铁,随后又发明了自励电励磁发电机,开创了电励磁方式的先河。
它弥补了天然磁铁的不足,在随后的几十年中,电励磁电机逐渐取代了原始的永磁电机随着电机技术发展的需要,人们开始不断寻找磁性能更好的永磁材料。
20世纪中期被发现并加以应用的铝镍钴永磁材料和铁氧体永磁材料就是很好的例子,因其磁性能在原有材料基础上的较大提高,因此在工业、农业、军事或者在日常生活中人们又重新重视起永磁电机的应用。
但这两种材料也有其自身的缺陷,铝镍钴永磁材料矫顽力较低、易退磁,铁氧体永磁材料的剩磁较低,在一定程度上又限制了永磁电机的发展。
随着人们的继续探索,20世纪60年代美国人K.J.Stmat研制出的以钐钴为主要成分的稀土永磁材料,被称为第一代稀土永磁材料,引领永磁电机发展到一个新的阶段。
由于其价格昂贵,起初各国研发的重点通常在航空航天和要求高性能的高科技领域。
河南城建学院毕业设计(论文)任务书题目三相感应电动机的建模及Simulink仿真系别电气与电子工程系专业电气工程及其自动化班级学号61 学生姓名指导教师发放日期2011年 5 月 13日河南城建学院教务处制河南城建学院本科毕业设计(论文)任务书注:任务书必须由指导教师和学生互相交流后,由指导老师下达并交教研室主任审核后发给学生,最后同学生毕业论文等其它材料一起存档。
毕业设计(论文)成绩评定答辩小组评定意见一、评语(根据学生答辩情况及其论文质量综合评定)。
二、评分(按下表要求评定)答辩小组成员签字年月日毕业答辩说明1、答辩前,答辩小组成员应详细审阅每个答辩学生的毕业设计(论文),为答辩做好准备,并根据毕业设计(论文)质量标准给出实际得分。
2、严肃认真组织答辩,公平、公正地给出答辩成绩。
3、指导教师应参加所指导学生的答辩,但在评定其成绩时宜回避。
4、答辩中要有专人作好答辩记录。
指导教师评定意见一、对毕业设计(论文)的学术评语(应具体、准确、实事求是):签字:年月日二、对毕业设计(论文)评分[按下表要求综合评定]评分表针对三相感应电动机故障诊断与保护,了解了国内外研究现状与发展,综述了该电机故障诊断技术的特点和研究成果。
在此基础之上,采用监测定子电流判断感应电动机工作是否正常,从而实现检测电机的故障。
在具体的研究过程中,首先熟悉感应电动机的工作机理以及基本结构,系统分析笼型感应电动机定子绕组、转子绕组、转子偏心和轴承发生故障时的特性,并提取出电动机在故障时相应的检测方法。
进行三相感应电动机缺相、过压、欠压的故障状态分析,设计出相应的保护电路。
针对感应电动机起动过程、堵转和短路等采用继电保护的不足,提出利用微机保护弥补缺陷。
微机保护技术的特点是数字化、智能化以及多功能化,其发展具有广阔的前景。
采用Matlab/Simulink建立三相感应电动机的仿真模型。
在这一部分中,先建立无故障状态下的仿真模型,对其进行参数仿真与分析;然后,对其过载运行、三相电源不对称等各种不同情况进行下进行仿真与分析,从而使对电动机的故障有更深层的理解。
感应电动机磁链观测模型的应用在感应电动机矢量控制系统中,电动机转子磁链的准确估计是改善系统性能的关键因素,分析了3种不同的转子磁链观测方法,同时给出了它们的磁链观测器模型并在DSP2812微处理器控制系统中进行了实验验证,实验结果表明不同磁链观测模型有不同特点。
标签:感应电机;改进电压模型;全阶磁链观测器;矢量控制0 引言从理论上讲,直接检测是比较准确的,但在实际应用上这些方法都会遇到不少工艺问题,而且受齿槽影响,使检测到的信号中含有较大的脉动分量,特别是在低速区时,它的成分就越大。
因此,现今多采用间接计算的方法。
即利用容易测得的物理量电压、电流或者转速等信号,借助转子磁链模型,实时计算磁链的幅值与相位[1]。
本文分析了电压型转子磁链模型、参考自适应转子磁链模型与全阶磁链观测器模型的不同特点,在基于定点DSP 微处理器TMS320F2812的感应电机控制系统进行了实验,实验结果验证了不同模型的不同特点。
1 感应电机转子磁链不同数学模型建立合适的数学模型和状态方程是研究矢量控制系统的基础。
对感应电机转子磁链观测模型的选取主要是取决于具体的应用环境,根据需要权衡其利弊来选择适当的方案。
1.1 改进电压模型的转子磁链模型采用电流模型计算转子磁链时需要电流和转速信号,但是电机参数的变化会影响它的精确度。
而电压模型受电机参数的影响较小,但是定子绕组反电动势积分项累积误差影响计算结果,容易产生直流偏移和积分饱和等问题[2];并且在低速区时,定子电阻压降变化大,使电压模型计算出的转子磁链不够准确。
因此传统的电压模型转子磁链轨迹将不再是以圆心为中心,当电机运行频率很低时这种现象尤其明显[3]。
为此结合电流模型和电压模型优点,建立改进电压模型的转子磁链观测器,在低速区时,使用电流模型对电压模型进行修正,引入经PI 作用得到的补偿电压来消除纯积分环节和定子电阻参数误差带来的影响。
PI调节器如式(1)所示。
定子磁链学模型如式(3)所示1.2 基于模型参考自适应法(MRAS)的转子磁链模型模型参考自适应(Model Reference Adapt System,MRAS)是由不含未知参数的方程作为参考模型和含有待估计参数的方程作为可调模型之差,构成自适应律,使得参考模型和可调模型输出误差接近零[4]。