九年级物理杠杆与滑轮
- 格式:ppt
- 大小:306.00 KB
- 文档页数:13
九年级物理第十一章简单机械和功§11.1 杠杆1.在物理学中,将一根在力的作用下可绕一固定点转动的硬棒叫做杠杆。
2.杠杆的平衡条件F1·L1=F2·L2。
3.①若L1>L2,F1<F2,则是省力杠杆,费距离;②若L1<L2,F1>F2,则是费力杠杆,省距离;③若L1=L2,F1=F2,则是等臂杠杆。
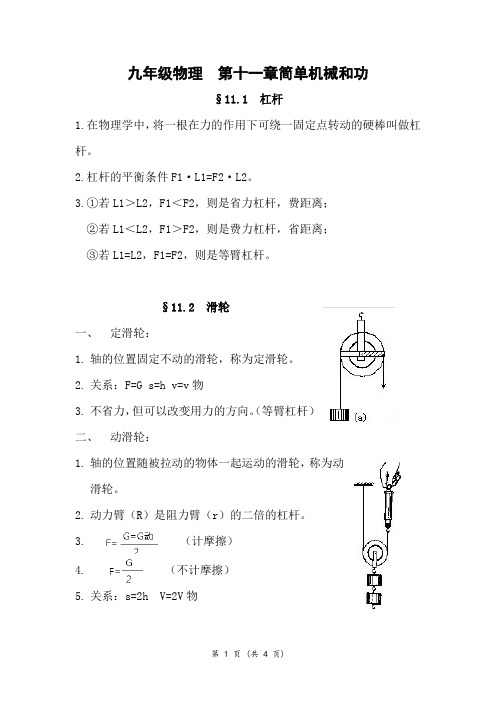
§11.2 滑轮一、定滑轮:1.轴的位置固定不动的滑轮,称为定滑轮。
2.关系:F=G s=h v=v物3.不省力,但可以改变用力的方向。
(等臂杠杆)二、动滑轮:1.轴的位置随被拉动的物体一起运动的滑轮,称为动滑轮。
2.动力臂(R)是阻力臂(r)的二倍的杠杆。
3.(计摩擦)4.(不计摩擦)5.关系:s=2h V=2V物三、滑轮组:1.滑轮组用几段绳子吊物体,提起物体的力就是物重的几分之一。
2.3.四、水平放置滑轮:S=n S物V=n V物四、如何设计滑轮:G=Fn-G动G动=Fn-G§11.3 功1.力与物体在力的方向通过的距离的乘积,叫做功。
2.W=Fs3.1J=1N·m4.做功条件:一是对物体要有力的作用,二是物体要在力的方向上通过一定的距离。
5.不做功的情况:①F≠0,S=0。
有力没距离,W=0②F=0,S≠0。
有距离没力,W=0③F≠0,S≠0。
F⊥S§11.4 功率1.单位时间内所做的功叫功率。
2.3.1W=1J/s4.1KW=1000W 1MW=1000000 1马力=735W§11.5 机械功率1.利用任何机械都不能省功,但动力所做的功也不会无缘无故消失。
2.总功:动力对机械所做的功。
有用功:对我们有用的功(机械对物体所做的功)。
额外功:利用机械时由于机械有重量及摩擦,不得不做而对我们无用的功。
3.W总=W有用+W额外动h(不计摩擦)4.5.提高机械效率的方法:①减小自重②减小摩擦③尽量满载6.W有=fs物7.8.。

杠杆滑轮知识点总结一、引言杠杆和滑轮是物理学中的基本机械原理,也是日常生活中广泛应用的工具。
杠杆和滑轮原理的运用,使得人类能够用更小的力量完成更大的作用。
因此,了解杠杆和滑轮的原理及其应用对于物理学习及生活实践都具有重要意义。
二、杠杆杠杆是一种能够将作用于其上的力量放大的简单机械。
杠杆原理的应用广泛,不仅在日常生活中,而且在工业生产中也有着重要的应用。
杠杆原理的核心是通过在支点处的力臂和阻力臂之间的影响,使施加在杠杆上的力量增加或减小,从而达到我们需要的目的。
1.1杠杆的定义杠杆是一种能够改变力的方向和大小的简单机械装置。
在杠杆中,按施加力与支点的相对位置不同,杠杆可以分为一级杠杆、二级杠杆和三级杠杆。
1.2杠杆的原理杠杆原理主要由杠杆的平衡条件和力矩平衡条件组成。
在杠杆平衡条件下,施加在杠杆上的力和力臂与阻力和阻力臂之间的乘积相等,即F1×L1=F2×L2。
这一原理说明了,如果我们想要减小施加在阻力臂上的力,可以增加力臂的长度,或者在施加力的方向调整上进行改进。
1.3杠杆的应用在日常生活中我们能很容易地找到多个杠杆的应用情景。
比如开门的把手、切割食物的刀等等。
而在工业生产中,杠杆的应用更加广泛,比如各种压力、扭转力的测量和传递。
这说明了杠杆原理对于人类生产活动的帮助。
三、滑轮滑轮是一种使得承载对象能够行动更加便捷的机械。
滑轮主要通过改变力的方向来减小力量的大小,从而提高工作效率。
滑轮广泛应用于各类起重装置和机械传动装置中,是工业生产中的重要组成部分。
2.1滑轮的定义滑轮是一种由固定在架上的轴承的圆盘,通过消除摩擦,使托运物体能够更加便捷地进行上升或下降。
滑轮通常被固定在一根绳索上,每个滑轮都可以减小下方托运物体的负载压力。
2.2滑轮的原理滑轮的原理主要是利用摩擦的减小来达到目的的。
在传统的滑轮中,上下支点之间的力学平衡原理能够帮助我们减小上方施加在绳索上的力并提高效率。
最简单的滑轮原理是1:1滑轮,即上下支点之间力量的大小相等。


一、简单机械:1.杠杆:杠杆是由杠杆臂、支点和力臂组成的简单机械装置。
在杠杆上,力臂越大,力度越小,反之,力臂越小,力度越大。
支点处受力平衡,即力矩相等。
2.滑轮:滑轮由轮筒和轮外零件构成,用于改变施力方向。
滑轮可以分为固定滑轮和活动滑轮。
固定滑轮用于改变施力方向,力度不变;活动滑轮可以改变施力方向,同时还能改变力的大小。
3.斜面:斜面是曲面的倾斜物体,可用于减小移动物体所需的力量。
斜面上物体所受的力可以分为一个与斜面平行的力和一个垂直于斜面的力。
斜面较平时所需的力较小,斜面较陡时所需的力较大。
4.轮轴:轮轴由轴和轮组成,是一种用于减小摩擦力的简单机械装置。
通过使用轮轴,可以减小力的大小,但同时需要增加施力的距离。
5.楔子:楔子是一种用于分割或固定物体的简单机械装置。
楔子的刃部较小,施加的力较大,可以将物体分为两半。
楔子的刃部较大,施加的力较小,可以将物体固定在一起。
二、功:1. 功的定义:功是力在作用方向上的乘积。
即功=力× 距离×cosθ。
其中,力的单位为牛顿(N),距离的单位为米(m),角度θ为力的方向与移动方向之间的夹角。
2.正功和负功:当力与物体的运动方向一致时,称为正功;当力与物体的运动方向相反时,称为负功。
3.功的单位:国际单位制中,功的单位为焦耳(J)。
其他常见单位有千焦耳(kJ)和千瓦时(kWh)。
4.机械功率:机械功率是指单位时间内所做的功。
机械功率等于力×速度,即功率=功÷时间。
机械功率的单位是瓦特(W)。
5.机械效率:机械效率是指输入功与输出功之间的比值,可以用来衡量机械装置的工作效率。
机械效率等于输出功÷输入功乘100%。
通常用百分比表示。

初三物理杠杆滑轮练习题在初三物理学习中,杠杆和滑轮是非常重要的两个概念。
它们在解决物理问题中起到了至关重要的作用。
下面将提供一些物理杠杆和滑轮的练习题,以帮助学生深入理解这两个概念并提高解决问题的能力。
练习题1:杠杆问题1. 在一个平衡杠杆上,两个物体分别位于杠杆的两端。
左端的质量为2kg,距离支点的距离为4m。
右端的质量为5kg,距离支点的距离为x米。
求x的值。
解析:根据杠杆的平衡条件,左端的力矩等于右端的力矩,即2kg* 4m = 5kg * x。
解得x = 1.6m。
练习题2:滑轮问题2. 在一个滑轮系统中,两个物体分别悬挂在两个滑轮的两端。
左侧滑轮的半径为0.5m,右侧滑轮的半径为1m。
左侧物体的质量为4kg,左右两侧绳子不可伸长或收缩。
求右侧物体的质量。
解析:根据滑轮的性质,相连的物体悬挂在不可伸长或收缩的绳子上,左右两侧的拉力相等。
由于左侧滑轮的半径是右侧滑轮的二倍,根据力矩平衡条件,可得4kg * g * 0.5m = M * g * 1m,解得右侧物体的质量M为2kg。
练习题3:杠杆和滑轮混合问题3. 在一个杠杆和滑轮组成的复杂系统中,左端悬挂着一个重锤,右端悬挂着一个物体。
左端重锤的质量为8kg,右端物体的质量为4kg。
左杠杆臂的长度为2m,右杠杆臂的长度为4m。
右侧滑轮的半径为0.5m。
系统处于平衡状态,求右侧滑轮的拉力。
解析:首先根据杠杆的平衡条件,左边的力矩等于右边的力矩。
即8kg * g * 2m = 4kg * g * 4m + T * 0.5m,其中T表示右侧滑轮的拉力。
解得T = 48N。
通过以上这些练习题,我们可以看到杠杆和滑轮在物理学习中的重要性。
掌握了杠杆和滑轮的原理和运用,不仅能够很好地解决物理问题,还可以通过它们来解释和理解自然界中的现象。
然而,这些习题只是一部分,初三物理杠杆和滑轮的知识还远远不止于此。
在未来的学习中,同学们还需要进一步学习相关的公式和定律,并进行更加复杂的问题解析和应用。

龚璐佳同学个性化教学设计年级:九年级教师: 郭成强科目:物理班主任:陈佳日期: 9.5 时段: 10:00—12:00 课题杠杆和滑轮教学目标 1.知道什么是杠杆,能从常见的工具中认出杠杆。
2.通过观察和实验了解杠杆的结构,熟悉有关杠杆的名称:支点、动力、阻力、动力臂、阻力臂。
3.理解力臂的概念,会画杠杆的动力臂和阻力臂。
4.经历探究杠杆平衡条件的过程,理解杠杆平衡的条件,并能用它分析解决简单的有关杠杆平衡的问题。
5.知道杠杆的种类以及各种杠杆的特点。
6.知道杠杆在实际生活中的应用。
7.通过了解杠杆的应用,进一步认识物理学是有用的,提高学习物理的兴趣。
8.认识定滑轮和动滑轮。
9.知道使用滑轮的好处,理解定滑轮、动滑轮、滑轮组的作用。
10.会根据滑轮的挂线判断省力情况,会根据要求正确组装滑轮组11.掌握滑轮组的规律及公式,能应用做题。
重难点1、理解力臂的概念,会画杠杆的动力臂和阻力臂。
2、理解杠杆平衡的条件,并能用它分析解决简单的有关杠杆平衡的问题。
3、知道杠杆的种类以及各种杠杆的特点。
4、理解定滑轮、动滑轮、滑轮组的特点。
5、会根据滑轮的挂线判断省力情况,会根据要求正确组装滑轮组6、掌握滑轮组的规律及公式,能应用做题考点1、能从常见工具中认出杠杆,并能准确画出动力臂和阻力臂。
会根据滑轮的挂线判断省力情况,会根据要求正确组装滑轮组2、掌握滑轮组的规律及公式,能应用知识点剖析序号知识点预估时间掌握情况1 认识杠杆平衡条件2 力臂作图3 动滑轮和定滑轮4 滑轮组教学内容知识点一认识杠杆想一想:我们在生活中常常见到下面这些工具,他们在使用过程中有哪些相同的地方?以上工具我们在日常生活中非常常见,其实这些工具就是杠杆杠杆的定义:在物理学中,将一根在力的作用下可绕一固定点转动的硬棒称做杠杆。
杠杆的五要素: (1)支点:杠杆绕着转动的点,用“O ”表示。
它可以在杠杆的一端,也可以在杠杆的中间。
当杠杆转动时,支点是相对固定的。
第1节杠杆与滑轮清单01杠杆的概念1.在力的作用下能绕着(固定点)O转动的硬棒,这根硬棒就是杠杆。
2.杠杆五要素(1)支点:杠杆绕着转动的点,用“O”表示。
(2)动力:使杠杆转动的力,用“F1”表示。
(3)阻力:阻碍杠杆转动的力,用“F2”表示。
(4)动力臂:从支点到动力(作用线)的距离,用“l1”表示。
(5)阻力臂:从支点到阻力(作用线)的距离,用“l2”表示。
注意:无论动力还是阻力,都是作用在杠杆上的力,但这两个力的作用效果正好相反。
一般情况下,把人施加给杠杆的力或使杠杆按照人的意愿转动的力叫做(动力),而把阻碍杠杆按照需要方向转动的力叫(阻力)。
力臂是点到线的距离,而不是支点到力的(作用点)的距离。
力的作用线通过支点的,其力臂为(零),对杠杆的转动不起作用。
3.杠杆作图画力臂方法:一找支点、二画线、三连距离、四标签。
⑴找支点O;⑵延长力的作用线(虚线);⑶画力臂(实线双箭头,过支点垂直于力的作用线作垂线);⑷标力臂。
4.杠杆平衡条件(1)杠杆的平衡:当杠杆在动力和阻力的作用下(静止)时,我们就说杠杆平衡了。
(2)杠杆的平衡条件:(动力×动力臂=阻力×阻力臂),或F1l1=F2l2。
5.杠杆的应用(1)省力杠杆:动力臂l1 (>)阻力臂l2,则平衡时F1<F2,这种杠杆使用时可省力(即用较小的动力就可以克服较大的阻力),但却费了距离(即动力作用点移动的距离大于阻力作用点移动的距离,并且比不使用杠杆,力直接作用在物体上移动的距离大)。
(2)费力杠杆:动力臂l1 (<)阻力臂l2,则平衡时F1>F2,这种杠杆叫做费力杠杆。
使用费力杠杆时虽然费了力(动力大于阻力),但却省距离(可使动力作用点比阻力作用点少移动距离)。
(3)等臂杠杆:动力臂l1=阻力臂l2,则平衡时F1=F2,这种杠杆叫做等臂杠杆。
使用这种杠杆既不省力,也不费力,即不省距离也不费距离。
既省力又省距离的杠杆时不存在的。
1:定滑轮实质是:动力臂等于阻力臂的等臂杠杆,动滑轮的实质是:动力臂为阻力臂2倍的省力杠杆。
2:定滑轮不能省力但可以改变力的方向,而动滑轮不能改变力的方向但可以省一半的力。
对于定滑轮无论沿哪个方向拉由于动力臂均为定滑轮的半径所以力的大小相同。
而对于动滑轮在竖直方向拉时拉力的力臂为圆的直径由于力臂最大,所以所用的力最小,不考虑动滑轮的重力及绳重和摩擦,最多可省一半的力,当倾斜拉绳子时,由于拉力的力臂变小,所以拉力越来越大。
3:滑轮组即可以省力又可以改变力的方向且对于滑轮组其省力情况取决于绕过动滑轮的绳子的股数,对于同一个滑轮组,绕过动滑轮的绳子股数越多越省力4:对于同一滑轮组其机械效率的高低取决于三个因素:物体的重力,动滑轮的重力,滑轮与绳子及轴的各种摩擦;在控制变量的情况下滑轮组的机械效率与物体的重力成正比,与动滑轮的重力及摩擦均成反比;对于同一个滑轮组提高机械效率最简单的方法是:增加物重。
注:滑轮的计算通常有以下几种题型:此专题,必须掌握常见的滑轮的相关题型及常见的计算公式,正确分析物体受力情况,对于较复杂的题目型还应列出方程组去求解,常见的滑轮计算题有以下几种常见的题型:题型一:物体在滑轮组的作用下上、下移动的题型:1:如图所示对于此种装置图中,求绳子末端拉力F的几种方法是:(1)V绳=nV物S绳=nh(2)η=Gh/FS η=G物/G物+G动η= G物/nF(3) F=G物+G动/n{不计各种摩擦}其中n指绳子的股数(4)由P=FV绳=F×nV物P=W/t(5)W有=G物h W总=FS= Pt=W有/η W总=G物h+G动h+Wf题型二:在滑轮组的作用下物体沿水平面移动的题型:如下图所示此种题型物体通常在拉力作用,摩擦摩擦力发生移动竖直方向上的重力与支持力通常不是此种题型要探究的物理量,常用的对应公式是:V绳=nV物S绳=nhW有=fs W总=FS 机械效率η=fs物/Fs绳=f/nF。
简单机械(杠杆、滑轮)一、知识点1.物理学中,一般把一根在力的作用下可绕固定点转动的硬棒叫做杠杆。
2.杠杆绕着转动的点叫做支点;使杠杆转动的力叫做动力;阻碍杠杆转动的力叫做阻力;从支点到动力作用线的距离叫做动力臂;从支点到阻力作用线的距离叫阻力臂。
3.杠杆的平衡条件:动力×动力臂=阻力×阻力臂4.动力臂大于阻力臂的是省力杠杆;动力臂小于阻力臂的是费力杠杆。
5.定滑轮在使用时,不随物体移动而移动,定滑轮本质上是等臂杠杆,不能省力但能改变力的方向;动滑轮在使用时,随着物体的移动而移动,动滑轮本质上是省力杠杆,可以省力但不改变力的方向。
6.由动滑轮和定滑轮组合而成的机械叫做滑轮组,其特点是能省力,有的既能省力又能改变力的方向。
滑轮组绳子端的拉力为GF=n总(不计摩擦)。
二、例题精讲【例1】★学校里的工人师傅使用如图所示的剪刀修剪树枝时,常把树枝尽量往剪刀轴O靠近,这样做的目的是()A.增大阻力臂,减小动力移动的距离B.增大动力臂,省力C.减小阻力臂,减小动力移动的距离D.减小阻力臂,省力考点:杠杆的应用.专题:简单机械.分析:剪树枝时,用剪刀口的中部,而不用剪刀尖,减小了阻力臂,就减小了动力,在阻力、动力臂一定的情况下,根据杠杆的平衡条件知道减小了动力、更省力.解答:解:用剪刀口的中部,而不用剪刀尖去剪树枝,减小了阻力臂L2,而动力臂L1和阻力F2不变,∵F1L1=F2L2,∴F1=将变小,即省力.故选D.【例2】★★图中F1、F2和F3是分别作用在杠杆上使之在图示位置保持平衡的力,其中的最小拉力是()A.F1B.F2C.F3D.三个力都一样考点:杠杆中最小力的问题;杠杆的平衡条件.专题:应用题;图析法.分析:本题主要考查两个知识点:(1)对力臂概念的理解:力臂是指从支点到力的作用线的距离.(2)对杠杆平衡条件(F1l1=F2l2)的理解与运用:在阻力跟阻力臂的乘积一定时,动力臂越长动力越小.据此分析判断.解答:解:分别从支点向三条作用线做垂线,分别作出三条作用线的力臂,从图可知,∵三个方向施力,F2的力臂L OA最长,而阻力和阻力臂不变,由杠杆平衡条件F1l1=F2l2可知,动力臂越长动力越小,∴F2最小(最省力)故选B.【例3】★★★(2014•安顺)如图甲所示,长1.6m、粗细均匀的金属杆可以绕O点在竖直平面内自由转动,一拉力﹣﹣位移传感器竖直作用在杆上,并能使杆始终保持水平平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图乙所示.据图可知金属杆重()A.5N B.10N C.20N D.40N考点:杠杆的平衡条件.专题:图析法.分析:金属杆已知长度,且质地均匀,其重心在中点上,将图示拉力F与作用点到O点距离x的变化关系图赋一数值,代入杠杆平衡条件求出金属杆重力.解答:解:金属杆重心在中心上,力臂为L1=0.8m,取图象上的一点F=20N,L2=0.4m,根据杠杆的平衡条件:动力×动力臂=阻力×阻力臂GL1=FL2G×0.8m=20N×0.4m解得:G=10N故选B.【例4】★★★★★(2014•包头)如图所示,均匀细杆OA长为l,可以绕O点在竖直平面内自由移动,在O点正上方距离同样是l的P处固定一定滑轮,细绳通过定滑轮与细杆的另一端A相连,并将细杆A端绕O点从水平位置缓慢匀速向上拉起.已知绳上拉力为F1,当拉至细杆与水平面夹角θ为30°时,绳上拉力为F2,在此过程中(不考虑绳重及摩擦),下列判断正确的是()A.拉力F的大小保持不变B.细杆重力的力臂逐渐减小C.F1与F2两力之比为1:D.F1与F2两力之比为:1考点:杠杆的动态平衡分析.专题:错解分析题;简单机械.分析:找出杠杆即将离开水平位置和把吊桥拉起到与水平面的夹角为30°时的动力臂和阻力臂,然后结合利用杠杆的平衡条件分别求出F1、F2的大小.解答:解:(1)细杆处于水平位置时,如右上图,△PAO和△PCO都为等腰直角三角形,OC=PC,PO=OA=l,OB=l;∵(PC)2+(OC)2=(PO)2,∴OC=l,∵杠杆平衡,∴F1×OC=G×OB,F1===G,(2)当拉至细杆与水平面夹角θ为30°时,绳上拉力为F2,如右下图,△PAO为等边三角形,AB=PA=l,AC′=l,∵(AC′)2+(OC′)2=(OA)2∴OC′=l,在△ABB′中,∠BOB′=30°,BB′=OB=×l=l,∵(OB′)2+(BB′)2=(OB)2,∴OB′=l,∵OB′<OB,∴细杆重力的力臂逐渐减小,故B正确;∵杠杆平衡,∴F2×OC′=G×OB′,F2===G,∴F1>F2,故A错误;则F1:F2=G:G=:1,故C错误,D正确.故选:BD.【例5】★★★如图所示,密度均匀的直尺AB放在水平桌面上,尺子伸出桌面的部分OB是尺长的三分之一,当在B端挂1N的重物P时,刚好能使尺A端翘起,由此可推算直尺的重力为()A.0.5N B.0.67N C.2N D.无法确定考点:杠杆的平衡条件.专题:应用题;简单机械.分析:密度均匀的直尺,其重心在直尺的中点处,则重力力臂为支点到直尺中心的长度;又已知B端的物重和B端到支点的距离,根据杠杆平衡的条件:动力乘以动力臂等于阻力乘以阻力臂即可求出直尺的重力.解答:解:设直尺长为L,从图示可以看出:杠杆的支点为O,动力大小等于物重1N,动力臂为L;阻力为直尺的重力G′,阻力的力臂为L﹣L=L.由杠杆平衡的条件得:G′L′=GL,即:G′×L=1N×L解得:G′=2N所以直尺的重力大小为2N.故选C.【例6】★★(2013•通辽)在水平桌面上放一个重300N的物体,物体与桌面的摩擦力为60N,如图所示,若不考虑绳的重力和绳的摩擦,使物体以0.1m/s匀速移动时,水平拉力F和其移动速度的大小为()A.300N0.1m/s B.150N0.1m/s C.60N0.2m/s D.30N0.2m/s考点:滑轮组绳子拉力的计算;滑轮组及其工作特点.专题:简单机械.分析:(1)如图,物体在水平方向上做匀速直线运动,根据二力平衡的条件可知物体所受的拉力等于物体受到的摩擦力,然后根据定滑轮和动滑轮的工作特点,即可求出绳子末端拉力与摩擦力之间的关系.(2)有两段绳子与动滑轮接触,绳端移动的距离是物体移动距离的2倍,则速度也是物体移动速度的2倍.解答:解:(1)由于物体在水平面上做匀速直线运动,所以物体所受拉力等于物体受到的摩擦力;滑轮组是由两根绳子承担动滑轮,所以绳子末端拉力F=f=×60N=30N.(2)有两段绳子与动滑轮接触,绳子自由端移动的距离是物体移动距离的2倍,故绳子自由端移动速度是物体移动速度的2倍,即v=0.1m/s×2=0.2m/s;故选D.【例7】★★★(2010•玉溪)如图是胖子和瘦子两人用滑轮组锻炼身体的简易装置(不考虑轮重和摩擦).使用时:(1)瘦子固定不动,胖子用力F A拉绳使G匀速上升.(2)胖子固定不动,瘦子用力F B拉绳使G匀速上升.下列说法中正确的是()A.F A<G B.F A>F B C.F B=2G D.以上说法都不对考点:滑轮组绳子拉力的计算;定滑轮及其工作特点;动滑轮及其工作特点.专题:推理法.分析:分析当胖子和瘦子拉绳时,三个滑轮是动滑轮还是定滑轮,根据动滑轮和定滑轮的特点分析判断.解答:解:(1)瘦子固定不动,胖子拉绳使G匀速上升,此时中间滑轮为动滑轮,上下两个滑轮为定滑轮,F A=2G,故A错;(2)胖子固定不动,瘦子拉绳使G匀速上升,三个滑轮都是定滑轮,F B=G,故C错;综合考虑(1)(2)F A>F B,故B正确、D错.故选B.【例8】★★★★★如图所示,不计绳重和摩擦,吊篮与动滑轮总重为450N,定滑轮重力为40N,人的重力为600N,人在吊篮里拉着绳子不动时需用拉力大小是()A.218N B.220N C.210N D.236N考点:滑轮组绳子拉力的计算.专题:整体思想.分析:本题可用整体法来进行分析,把动滑轮、人和吊篮作为一个整体,当吊篮不动时,整个系统处于平衡状态,那么由5段绳子所承受的拉力正好是人、动滑轮和吊篮的重力和.可据此求解.解答:解:将人、吊篮、动滑轮看作一个整体,由于他们处于静止状态,受力平衡.+G吊篮)=(600N+450N)=210N.则人的拉力F=(G人+G轮故选C.【拓展题】(2014•烟台)如图所示,一根质地均匀的木杆可绕O点自由转动,在木杆的右端施加一个始终垂直于杆的作用力F,使杆从OA位置匀速转到OB位置的过程中,力F的大小将()A.一直是变大的B.一直是变小的C.先变大,后变小D.先变小,后变大答案:C考点:杠杆的平衡分析法及其应用.解析:根据杠杆平衡条件F1L1=F2L2分析,将杠杆缓慢地由最初位置拉到水平位置时,动力臂不变,阻力不变,阻力力臂变大,所以动力变大.当杠杆从水平位置拉到最终位置时,动力臂不变,阻力不变,阻力臂变小,所以动力变小.故F先变大后变小.故选C.如图所示OB为粗细均匀的均质杠杆,O为支点,在离O点距离为a的A处挂一个质量为M的物体,杠杆每单位长度的质量为m,当杠杆为多长时,可以在B点用最小的作用力F维持杠杆平衡?()A.B.C.2Ma/m D.无限长答案:A考点:杠杆的平衡分析法及其应用.解析:(1)由题意可知,杠杆的动力为F,动力臂为OB,阻力分别是重物G物和杠杆的重力G杠杆,阻力臂分别是OA和OB,重物的重力G物=Mg杠杆的重力G杠杆=mg×OB ,由杠杆平衡条件F1L1=F2L2可得:F•OB=G物•OA+G杠杆•OB,(2)代入相关数据:则F•OB=Mg•a+mg•OB•OB,得:F•OB=Mga+mg•(OB)2,移项得:mg•(OB)2﹣F•OB+Mga=0,∵杠杆的长度OB是确定的,只有一个,所以该方程只能取一个解,∴该方程根的判别式b2﹣4ac等于0,因为当b2﹣4ac=0时,方程有两个相等的实数根,即有一个解,即:则F2﹣4×mg×Mga=0,则F2=2mMg2a,得F=•g,(3)将F=•g代入方程mg•(OB)2﹣F•OB+Mga=0,解得OB=.故选A.(2010•西城区二模)如图所示,体重为510N的人,用滑轮组拉重500N的物体A沿水平方向以0.02m/s的速度匀速运动.运动中物体A受到地面的摩擦阻力为200N.动滑轮重为20N(不计绳重和摩擦,地面上的定滑轮与物体A相连的绳子沿水平方向,地面上的定滑轮与动滑轮相连的绳子沿竖直方向,人对绳子的拉力与对地面的压力始终竖直向下且在同一直线上,).则下列计算结果中,错误的是()A.绳子自由端受到的拉力大小是100N B.人对地面的压力为400NC.人对地面的压力为250N D.绳子自由端运动速度是0.01m/s答案:ACD考点:滑轮组绳子拉力的计算;速度的计算.解析:A、由图知,n=2,不计绳重和摩擦,拉力F=(G轮+f地)=(20N+200N)=110N,故A错,符合题意;BC、人对地面的压力F压=G﹣F=510N﹣110N=400N,故B正确、C错;D、绳子自由端运动速度v=2×0.02m/s=0.04m/s,故D错.故选ACD.某工地工人在水平工作台上通过滑轮组匀速提升货物,如图所示.已知工人的质量为70kg.第一次提升质量为50kg的货物时,工人对绳子的拉力为F1,对工作台的压力为N1;第二次提升质量为40kg的货物时,工人对绳子的拉力为F2,对工作台的压力为N2.已知N1与N2之比为41:40,g取10N/kg,绳重及滑轮的摩擦均可忽略不计.则F1与F2之比为________。