车桥耦合振动分析
- 格式:ppt
- 大小:1.40 MB
- 文档页数:59


第18卷 第3期 重 庆 交 通 学 院 学 报1999年9月Vol.18 No.3 JOURNAL OF CHONG QINGJ IAOTONG INSTITUTE Sep.1999 文章编号:10012716(1999)0320014207车桥耦合振动分析的数值方法Ξ单德山,李 乔(西南交通大学土木工程学院桥梁及结构工程系,四川成都610031)摘要:车桥耦合振动问题是铁路和公路桥梁中十分重要的研究课题,而目前所采用的数值算法所需的时间比较长,为了减少计算机时,本文在对高速铁路曲线梁车2桥耦合振动研究中,建立了一种基于激励非线性振动的数值计算方法,并完成了计算程序BSNDS的编制,取得了较好的计算结果.并将其与其他模型进行比较,在保证精度的前提下,较大地节省了计算时间.关 键 词:结构工程;耦合振动;数值方法中图分类号:U443234 文献标识码:A对于车桥耦合振动分析这一类复杂问题,常用的算法有两种:时间序列的逐步积分法和频响函数法.时间序列的逐步积分法是将车辆和桥梁看作一个大的振动系统,建立该系统的运动微分方程并用直接积分法求解,得到各自由度上的位移、速度和加速度的时程[1];频响函数法是基于随机振动的一种方法,该方法首先计算出车桥耦合系统的频响函数,用激励力的功率谱作为输入,求得系统在频域的响应[2].本文所介绍的方法是基于激励非线性振动的一种逐步积分法,在计算中应用了求解非线性振动的Newmark预测2校正法[9],即在每一时段里预测桥梁的位移、速度、加速度和车桥系统的耦合力,此时车桥系统的位移条件是协调的,以此作为迭代的开始进行计算,从而减少了迭代次数,进而减少了计算机时.车桥耦合振动分析的困难在于寻找一种能处理车桥运动耦合的方法.在接触点处采用常规的运动方程的形式来描述车2桥系统的耦合振动W+KW=f cp(1)W+CM¨式中,桥的特性由M(质量阵)、C(阻尼阵)、K(刚度阵)和W(位移)来描述.位移函数W是在t时刻接触点的位移;W、¨W分别表示其速度和加速度;点号(・)表示对时间求导;式(1)中f cp表示车桥间的耦合力,它可以看成是由桥上移动的车辆所施加的力.f cp是车辆运动的函数,它还与桥梁的振动和路线的不平顺有关,这种相互关联的运动称为车2桥系统的运动耦合.当t时刻有两个或更多的车辆在桥上时,耦合力f cp还与桥上其它车辆有关.车与车之间的耦合通过桥Ξ收稿日期:1998211220基金项目:铁道部科技开发研究项目97G07作者简介:单德山(1969-),男,四川大竹县人,西南交通大学讲师(博士),从事的研究是结构的空间行为.梁的运动而包含在耦合力f cp 中,这样就可考虑同时通过桥梁的所有车辆的影响.然而在每一时间步里,f cp 事先并不知道,且是与未知量W 及其导数、车的特性等有关的函数.显然,考虑运动耦合时,耦合力f cp 是非线性的,式(1)为非线性运动方程,因而系统的响应也为非线性.如果忽略耦合运动,f cp 仅是一与时间有关的荷载,此时该问题简化为移动荷载作用下的振动问题.1 系统运动微分方程的离散桥梁结构承受动荷载的微分方程为:M ¨D +C D +KD =F (2)式中,M 、C 、K 分别为桥梁的质量、阻尼和刚度矩阵;D =D (t )为离散系统的结点位移向量; D 和¨D 分别为结点的速度和加速度向量;F 为作用在结构上的力矢量,它是时间t 的函数,F 主要由耦合力、车的重量和桥的重量等组成.桥梁单元的质量和刚度矩阵是根据考虑剪切变形的空间直梁和考虑翘曲的曲线梁而推导出来的[3]、[6].空间直线梁单元由6个自由度组成,即由3个线位移和3个角位移组成;空间曲线梁单元由7个自由度组成,即由3个线位移、3个角位移和截面翘曲位移组成.根据有限元法,将桥梁单元的有限单元矩阵和车桥耦合力的等效节点力组装起来就可得到公式(2)的离散矩阵方程.如果单元的局部坐标与总体坐标方向不一致,应进行坐标变换.在车桥耦合振动中,还应考虑系统阻尼的影响;对于桥梁单元仍采用Raleigh 阻尼,车辆的阻尼由其阻尼元件提供.2 车桥耦合振动求解的数值算法为了能够求解方程(2),应在方程(2)中引入边界条件(包括位移边界条件和力的边界条件).此时满足方程(2)的位移矢量D =D (t )即为方程的解.给定的初始条件为:D (0)=u 0;D (0)= u 0;u 0和 u 0分别为在t =0时刻位移和速度的初始值.211 系统方程的时间离散根据Newmark 法的要求,方程(2)尚需对时间进行离散.实际上时间离散仅是一个代数问题.为了反映控制微分方程的这个特征,在以后的描述中桥梁的位移D (t )、速度 D (t )、加速度¨D (t )分别用D n 、V n 、A n 来表示;t n 为第n 时段(1≤n ≤N );N 为时间段离散的数目.同样d n 、v n 、a n 分别表示t n 时段车辆的位移、速度、加速度,即d n =d (t n );v n =d (t n );a n =¨d (t n ).当求解下一时段时,即n +1时段车桥运动方程按如下表示:MA n+1+CV n+1+KD n+1=F n+1(3)式中,D n +1、V n +1、A n +1为t =t n +1时桥梁的位移、速度、加速度;F n +1=F cp n +1+F sp n +1,F sp n +1包括了桥的恒载及规范所规定作用的荷载.F cp n +1为车2桥间的耦合力,对于一维的运动质量(图1),t n +1时刻的耦合力为:F cp n+1=k 1(d cp -d r 1)n+1+c 1(v cp -v r 1)n+1(4)式中,d cp 、v cp 为接触点的位移和速度;v r 1、d r 1为车辆簧下质量ml 的位移和速度;k 1、c 1为车轮的弹簧刚度和阻尼(图1).由于车在接触点的d cp 、v cp 、a cp 是与桥梁的运动有关的,那么矢量51第3期 单德山等:车桥耦合振动分析的数值方法图1 一维运动质量可用以下的符号表示:F n+1=F sp n+1+F cp n+1(D cp n+1,V cp n+1,A cp n+1,d n+1,v n+1,a n+1)(5) 应用Newmark 法,可将t n +1时刻的位移和速度表示如下:D n+1=D n +ΔtV n +12Δt 2[(1-2β)A n +2βA n+1]V n+1=V n +Δt[(1-γ)A n +γA n+1](6)式中,Δt =t n +1-t n ;β,γ为保证计算精度和积分稳定性的控制参数.将式(6)代入式(3),并用符号表示有:MA n+1+CV n+1(A n+1)+KD n+1(A n+1)=F n+1(A n+1,d n+1,v n+1,a n+1)(7) 式(7)中并没有明显地含前一时段t n 所确定的带有下标n 的项.式(7)所表示的车桥耦合振动为非线性振动,因而最好采用迭代法求解.在这里采用一种与Newmark 法相关的多次预测2校正过程进行求解.在求解过程中,当前迭代步的校正值作为下一迭代步的预测值,那么预测2校正的过程将不断进行直到达到所需的精度要求.在t n +1时段,为将多次预测2校正过程初始化,必须假设式(7)中的初值A n +1.该值可设为A 0n +1且等于0,上标0表示预测2校正的迭代次数i =0.那么由式(6)可得D 0n+1=D n +ΔtV n +12Δt 2(1-2β)A n V 0n+1=V n +Δt (1-γ)A n (8) 由式(8)可知,A 0n +1为0时,V 0n +1和D 0n +1由前一时段的值完全确定.已知A 0n +1、V 0n +1和D 0n +1后,就可确定式(7)中的力矢量.至此可以开始预测2校正循环.而从计算实现的角度来看,更新迭代次数i 是非常方便的.再一次强调,车2桥系统的初始预测值不仅包括了A 0n +1、V 0n +1和D 0n +1,而且包括了F 0n +1,对应于A i -1n +1、V i -1n +1和D i -1n +1的力矢量为F i -1n +1.如式(5)所示的那样,F i -1n +1是耦合力(F cp n +1)i -1的函数,根据预测的桥梁位移和速度值,按如下方法确定F i -1n +1.已知桥梁的V i -1n +1和D i -1n +1,那么车在桥上的接触点在t n +1时段的d cp 、v cp 可通过包含接触点的桥梁单元的位移插值函数和截面的几何形状来得到.若要考虑到桥面的不平顺,那么不平顺的影响也应加到d cp 、v cp 中去.已知了d cp 、v cp ,那么车辆各自由度在t n +1时段的位移、速度和加速度可由下式得到:ma i -1n+1+cv i -1n+1+kd i -1n+1=f i -1n+1(9)式(9)中,m 、c 和k 表示车辆的质量矩阵、阻尼矩阵和刚度矩阵,它们的具体表达式祥见文[5]、[6].根据车辆动力学理论,求解方程(9)即可得到接触点处的耦合力(f cp n +1)i -1,随后根据有限元法得到耦合力的等效节点力,并由式(5)得到荷载力矢量,代入式(7)中即可进行求解.为了不中断当前的讨论,确定的d cp 、v cp 、d r 、v r 过程将在下一节中讨论.完成了初始预测步骤后,就可进入下一相应的校正步骤.一般来说,预测的A i -1n +1、V i -1n +1、D i -1n +1和力矢量F i -1n +1并不能满足方程(7).对应于时段t n +1的A i -1n +1、Vi -1n +1、D i -1n +1的力矢量F i -1n +1,系统残余力矢量的表达式为:ΔF =F i -1n+1-(MA i -1n+1+CV i -1n+1+KD i -1n+1)(10)61重庆交通学院学报 第18卷 若ΔF 在给定的误差范围内,校正过程中止.否则,校正过程将继续进行.用增量形式重写控制微分方程:M ΔA +C ΔV +K ΔD =ΔF(11) 参考式(6)可得ΔA =A i n+1-A i -1n+1,ΔV =V i n+1-V i -1n+1=Δt γΔA ΔD =D i n+1-D i -1n+1=Δt 2βΔA(12) 将式(12)代入式(11)中得ΔA =[M 3]-1ΔF(13)M 3定义为有效的结构质量矩阵:M 3=M +Δt γC +Δt 2βK(14)将由(13)得到的ΔA 代入式(12)中即可得到ΔD 、ΔV ,并对预测值A i -1n +1、V i -1n +1和D i -1n +1进行校正.至此,更新迭代次数i 和对应于当前预测值的力矢量F i n +1,一旦达到所需的精度,就转而进行下一时间步的计算.212 车辆接触点处的运动条件在接触点处的d cp 可按下式表示:d cp =d cp (x _,t )=w (x _,t )+r (x _)(15)式中,w (x _,t )为t 时刻接触点相对于总体坐标系的位移,矢量x _由坐标x 、y 组成,函数r (x _)描述路的不平顺.将式(15)对时间求导,就得到相应接触点的速度d cp (x _,t )=5w 5x 5x 5t +5w 5y 5y 5t +5w 5t +dr dx dx 5t +dr dy dy 5t (16)式中,5w/5x 、5w/5y 分别表示结构的位移w (x _,t )在纵向及横向的变化率(空间域);5x/5t 、5y/5t 表示车辆前进的速度和横向移动的速度(时间域),显然在一般的研究中可忽略5w/5y 和5y/5t 的影响(对于桥梁结构这一假设是可以满足的),那么式(16)可写为:d cp (x _,t )=5w 5x v (t )+5w 5t +dr dxv (t )(17)式中,v (t )表示在t 时刻总体坐标系中x 方向的车辆的行驶速度.在式(15)、(16)和(17)中w (x _,t )=[N ]T {δe };{δe }为桥梁单元的位移场;[N ]为位移场的形函数矩阵.重写式(15)、(17)得:d cp =[N ]{δe }+r (x _)d cp =v (t )[N ]T ,x {δe }+[N ]{δe },t +dr dxv (t )(18)式中,[N ],x 表示[N ]对x 求导;{δe },t 表示{δe }对时间t 求导.213 耦合力和车辆振动的时间离散在时段t n +1,假设在单元e 上车2桥的接触点为X A ,在总体坐标系中接触点的坐标为x n +1A、y n +1A :x n+1A =x n A +v n x Δt +12 v n xΔt 2y n+1A =y n A +v ny Δt +12 v n y Δt 2(19) 接触点的初始位置为X 0A ,由输入数据控制;v n x 、v n y 为车辆在t n 时刻沿总体坐标系x 、y 方71第3期 单德山等:车桥耦合振动分析的数值方法向上的速度; v n x、 v n y为相应的加速度,在曲线桥中,v n y、 v n y用以确定车辆在桥上的横向位置.一旦由式(18)确定了在t n+1时刻接触点的位移和速度d cp、v cp,车辆模型在i21次迭代的a r、v r、d r可用下式确定.m r a r n+1+c r v r n+1+k r d r n+1=f r n+1(20)式中,a r、v r、d r、m r、c r、k r、f r的详细表达式祥见文献[5]、[6].在式(20)中的d r n+1和v r n+1用差分来表示,应用Newmark方法有:d r n+1=d r n+Δtv r n+Δtv r n+12Δt2[(1-2β)a rn+2βa r n+1]= d r n+1+Δt2βa r n+1v r n+1=v r n+Δt[(1-γ)a r n+γa r n+1]= v r n+1+Δtγa r n+1(21)式中, d r n+1=d r n+Δtv r n+12Δt2(1-2β)a rnv r n+1=v r n+Δt(1-γ)a r n(22) 由式(22)可知, d r n+1和 v r n+1可由前一时刻t n而确定.应注意到式(20)和式(7)具有相同的形式,且均对应于系统的运动方程,但两个方程的本质并不一样.在方程(7)中,右端荷载项是将要确定的(还未确定).另一方面,一旦由桥梁结构位移场计算得到接触点处的位移值,式(20)中的力矢量即可确定.因此,在当前时段进行一次预测2校正过程就可精确确定式(20)的解.将式(21)代入式(20)中,并用基本未知量a r n+1来表示有:m3a r n+1=f3(23)式中,m3=m r+Δtγc r+Δt2βk r;f3=f r n+1+c r v r n+1+k r d r n+1(24) m3、f3定义为车辆的有效质量矩阵和有效力矢量,且 v r n+1、 d r n+1分别为v r n+1、d r n+1的预测值,求解式(23)可得a r n+1,随后利用式(21)就得到校正的v r n+1、d r n+1.得到车辆位移值v r n+1、d r n+1后,代入式(9)即得t n+1时刻接触点处耦合力的预测值(f cp)i-1n+1,并由有限元法得到耦合力的等效节点力.用F cp来表示单元e上接触点A所产生的等效节点力,其计算方法如下:F cp=∫[N]f cp dx(25) 为了计算机的实施方便,车辆系统各自由度在t=0时的初始值定义为0d cp=0, v cp=0, a cp=0, v r0=0, a r0=0(26) 将式(26)代入到式(20)中即可得到在t=0时耦合力f cp.这就是耦合力的初始迭代值.3 数值试验按照上述方法编制了可以计算直线和曲线梁车桥耦合振动的电算程序BSNDS,程序的开发环境是P ower2Station,该程序在wind ows95环境下工作,在编制过程中充分利用了wind ows95的内存管理,并利用了一些wind ows95编程技巧,这也是提高运算速度的一个重要方面.有关该程序的详细情况参见文[11].应用该程序计算了8~40m的标准铁路简支混凝土桥,在计算中采用的车辆模型为德国ICE拖车,桥梁及车辆的有关参数参见文[11].由于计算的结果比较多,限于篇幅本文仅给出了20m、32m简支梁的跨中的挠度动力系数(最大动挠度与最大静挠度的比值)与车辆行驶速度的关系图(图2)以及32m简支梁跨中截面位移响应的时程曲线(图3).将该计算结果与以前的研究成果[10]相比较其计算精度是可以得到保证的,且计算速度与其他程序相比要快得多.81重庆交通学院学报 第18卷图2 按车2桥耦合振动模型计算的动力参数与速度的关系图3 按车2桥耦合振动模型计算的跨中位移的时程(v =100m/s ,L =32m )4 结 论由上面的数值实验可知该数值算法的计算结果是可靠的,且在计算过程中一般需迭代1~2次即可收敛,从而较大地提高了计算速度,另外在该算法中若要考虑结构的非线性和车辆的阻尼、接触非线性,也只需将结构和车辆部分的刚度矩阵、阻尼矩阵、轮轨关系作相应的修改即可,无需对算法进行修改.参考文献:[1] 杨岳民.大跨度铁路桥梁车桥动力响应理论分析及实验研究[D].铁道部科学研究院博士学位论文,1995.[2] 朱汉华.列车2桥梁时变系统振动能量随机分析理论[D].长沙铁道学院博士学位论文,1992.[3] 丁皓江,何福保,谢贻权等.弹性和塑性力学中的有限元法[M].第2版.北京:机械工业出版社,1992.[4] 王福天.车辆系统动力学[M].北京:中国铁道出版社,1994.[5] 张定贤.机车车辆轨道系统动力学[M].北京:中国铁道出版社,1996.[6] 李 乔.薄壁曲箱梁的空间分析理论[D].西南交通大学研究生博士论文,1988.[7] YENER M ,CHOMPOOMING K .Numerical Method of Lines for Anal ysis of Vehicle 2Bridge Dynamicinteraction [J ].C om puter &Structure ,1994,53(3):7092726.[8] CHOMPOOMING K,YENER M.The Influence of R oadwa y Surface Irregularities and Vehicle Deceler 2ation on Bridge Dynamic Using The Method of Lines [J ].Journal of S ound and Vibration ,1995,183(4):5672589.[9] OWEN D R J ,HINTON E.Finite E lements in Plasticity :Theory and Practice [M].Pineridge Press 91第3期 单德山等:车桥耦合振动分析的数值方法02重庆交通学院学报 第18卷Limited,1980.[10]“八五”科技攻关项目.高速铁路桥梁动力性能研究[R].铁道部科学研究院铁道建筑研究所,1995.[11]单德山.薄壁曲箱梁车致振动理论研究[D].成都:西南交通大学研究生博士论文,1999.T he N um erical M ethod for Studying the I nteractionV ib ration b etw een B ridge and V ehicleSHAN De2shan,L I Qiao(S outhwest Jiaotong University Department of Bridge&Structural Engineering,Chengdu610031,China)Abstract:The interaction vibration between bridge and vehicle is an im portant problem in bridges of high2 way and railway.The numerical methods n ow usually used need much m ore time to com plete the analysis. W ith the aim of increasing the com putation efficiency,a numerical method which is based on the n onlinear vibration theory is proposed to study the dynamics between vehicle and curved bridge in high2speed railway. The program BSNDS is com posed to evaluate the method.The simulation proves that the method can de2 crease the com putation time greatly then other m odels without losing accuracy.K ey w ords:structural engineering;coupled vibration;numerical method。

第1章系统概述 (1)1.1系统特点 (1)1.2软件功能 (1)1.2.1车辆子系统 (2)1.2.2激励模型 (2)1.2.3桥梁/轨道子系统 (3)1.2.4求解方法 (3)1.2.5后处理 (3)1.3计算流程 (4)第2章软件安装与运行方式 (6)2.1软件安装 (6)2.2运行方式 (6)第3章前处理所需文本文件定义 (8)3.1输入文件概述 (8)3.2桥梁/轨道子结构:Modal_Substructure_Bridge.dat (9)3.2.1第一行控制参数 (9)3.2.2第二行后的节点坐标参数 (10)3.2.3轨道节点编号 (10)3.2.4集中阻尼和非线性弹簧单元定义 (10)3.2.5与仿真计算同步输出桥梁响应的节点个数 (11)3.2.6桥梁/轨道结构模态信息 (11)3.2.7后处理考察节点位移和应力/内力定义 (13)3.3车辆子结构:Modal_Substructure_Vehicletypes.dat (13)3.3.1第一行控制参数 (13)3.3.2第二行控制参数 (14)3.3.3第二行后的节点坐标参数 (14)3.3.4车轮节点编号 (14)3.3.5车轮静载、轮轨/路面耦合类型 (16)3.3.6车轮刚度、阻尼和质量等参数定义 (16)3.3.7集中阻尼和非线性弹簧单元定义 (16)3.3.8与仿真计算同步输出车辆响应的节点个数 (17)3.3.9车辆结构模态信息 (17)3.3.10其他车辆的定义 (17)3.4集中阻尼和非线性弹簧:NonlinearSpringParameters.dat (18)3.4.1第一行控制参数 (18)3.4.2其后依次定义每个单元的相关参数: (18)3.5轨道/车道位置:Rails_Location.dat (19)3.5.1第一行控制参数 (19)3.5.2第二行控制参数 (19)3.5.3每条轨道的关键点定义 (19)3.6车队编组及运行组织:VehicleOrginazition.dat (21)3.6.1第一行控制参数 (21)3.6.2车队编组定义 (22)3.6.3车队运行参数定义 (22)3.7路面不平顺:Irregularity.dat (23)3.7.1第一、三、五行提示参数 (23)3.4.1第二、四、六行控制参数 (23)3.4.2第六行后的不平顺样本 (24)3.8求解参数:SolutionParameters.dat (24)第4章后处理二进制文件存储格式 (26)4.1Modal_Substructure_Bridge_ANSYS (26)4.2Modal_Substructure_Bridge_ANSYS_postprocess.bin (26)4.3Res_DisResults_Bridge.bin (26)4.4Res_AccResults_Bridge.bin (27)4.5Res_Modal_Coordinate_Results_Bridge.bin (27)4.6Res_BridgeResponseBulkDate_disacc.bin (27)4.7Res_BridgeResponseBulkDate_dis_static.bin (28)4.8Res_BridgeResponseBulkDate_stress.bin (28)4.9Res_BridgeResponseBulkDate_stress_static.bin (28)4.10Res_AccResults_Vehicles.bin (29)4.11Res_DisResults_Vehicles.bin (29)4.12Res_ReductionRation_Vehicles.bin (29)4.13Res_DerailmentFactor_Vehicles.bin (30)4.1418.Res_WheelsetirregDisVehilces.bin (30)车桥耦合振动分析软件操作手册第1章系统概述车桥耦合振动分析软件VBC(Vehicle-Bridge Coupling)采用Intel Visual Fortran 2013语言编制而成,为Windows控制台程序,目前为3.1版本,可在32位或64位操作系统上运行。
高速铁路简支钢桁梁桥的车桥耦合振动分析高速铁路简支钢桁梁桥的车桥耦合振动分析摘要:高速铁路桥梁作为重要的交通基础设施之一,在车桥耦合振动问题上一直备受关注。
本文以高速铁路简支钢桁梁桥为研究对象,通过模态分析和数值计算探讨了车桥耦合振动现象及其对桥梁结构的影响,旨在为桥梁设计和安全评估提供参考依据。
1. 引言随着高速铁路的迅速发展,桥梁结构在铁路交通中的重要性日益凸显。
车桥耦合振动是高速铁路桥梁设计和运行中的一个重要问题,其影响着桥梁结构的稳定性和安全性。
因此,对车桥耦合振动进行深入研究,对于高速铁路桥梁的设计和运营具有重要的意义。
2. 研究方法本文采用有限元分析方法对高速铁路简支钢桁梁桥的车桥耦合振动问题进行分析。
首先,根据实际工程参数建立桥梁的有限元模型,并进行模态分析获取桥梁的固有频率和振型;然后,将列车载荷作为外荷载加载到桥梁模型上,通过数值计算方法分析车桥耦合振动现象。
3. 桥梁模型建立与模态分析根据高速铁路简支钢桁梁桥的实际参数,采用有限元软件对桥梁模型进行建立和模态分析。
模型中考虑了主梁、横梁、纵梁、支座等部件,并根据实际情况设定了较为真实的边界条件。
通过模态分析,得到了桥梁的前几阶固有频率和相应的振型。
4. 车桥耦合振动计算在桥梁模型基础上,将列车载荷作为外荷载加载到主梁上,并采用数值计算方法计算车桥耦合的振动情况。
在车桥耦合振动计算中,考虑了列车速度、轮轴间距、载荷频率等参数,并通过分析列车轮对对桥梁的作用力,计算桥梁的振动响应。
通过对不同速度下的车桥耦合振动进行分析,探讨了车桥耦合对桥梁结构的影响。
5. 结果与讨论通过模态分析和车桥耦合振动计算,得到了高速铁路简支钢桁梁桥的固有频率、振型和车桥耦合振动响应。
结果表明,车桥耦合振动会导致桥梁产生较大的动应力和挠度,从而对桥梁的结构稳定性和安全性产生较大影响。
此外,车桥耦合振动的频率也与桥梁自身的固有频率有关,需要在设计中充分考虑。
钢—混组合梁桥车桥耦合振动分析及局部疲劳研究钢—混组合梁桥车桥耦合振动分析及局部疲劳研究摘要:随着城市交通的发展和交通运输的日益繁忙,钢—混组合梁桥作为重要的城市交通枢纽,承担着巨大的交通压力。
然而,在长期的运营过程中,钢—混组合梁桥常常会遭受车辆荷载带来的振动和局部疲劳问题,这对桥梁的安全可靠性提出了挑战。
本文通过对钢—混组合梁桥车桥耦合振动以及局部疲劳的研究,旨在为提高桥梁的耐久性和减少维修成本提供理论支持。
1.引言钢—混组合梁桥是一种采用钢结构和混凝土结构相结合的桥梁形式。
其结构特点为钢负责承受水平荷载和高弯矩力,混凝土负责承受垂直荷载和低弯矩力。
这种桥型结构是传统混凝土桥和钢桥的结合,兼具了两种材料的优点。
然而,由于车辆荷载的作用,桥梁会产生振动,从而引发局部疲劳破坏。
因此,针对钢—混组合梁桥车桥耦合振动以及局部疲劳进行研究具有重要的现实意义。
2.车桥耦合振动分析车桥耦合振动是指运行车辆的振动会导致桥梁结构的振动,并且车桥振动与桥梁振动相互影响。
车桥耦合振动可以通过数学模型进行分析和预测。
通过建立动力学方程、运用傅里叶变换等方法,可以解决车桥耦合振动的问题。
实际工程中,可以利用有限元软件对桥梁进行车桥耦合振动分析,并可以预测车桥振动对桥梁结构的影响。
3.局部疲劳研究桥梁的局部疲劳指的是在特定的应力范围下,桥梁结构发生疲劳破坏的现象。
在钢—混组合梁桥中,常常会出现焊缝和连接件等局部部位的疲劳损伤。
局部疲劳的研究需要利用疲劳试验、应力分析等方法,以确定桥梁在不同工况下的局部疲劳特性。
通过分析局部断裂机理,可以提出针对性的改进措施,增强桥梁结构的抗疲劳能力。
4.耐久性改进措施为了提高钢—混组合梁桥的耐久性和减少局部疲劳破坏,可以采取以下措施:4.1 结构优化设计:通过优化桥梁的几何形状和剖面尺寸,减小悬臂长度和跨距,以降低桥梁的自振频率,从而减少车桥耦合振动。
4.2 车辆配置优化:调整交通流量和车辆速度,减少车辆对桥梁的荷载作用,降低桥梁的振动响应。

车桥耦合系统随机振动的时域显式解法车桥耦合系统是指由汽车和其所搭载的车轮组成的一个复杂机械系统。
在运动过程中,车轮与车桥的振动相互耦合,导致系统的动态行为产生很多问题,如振动、噪声和疲劳等。
因此,对车桥耦合系统的振动行为进行研究,有助于优化车辆的设计和改善乘坐舒适性。
在研究车桥耦合系统的随机振动问题时,我们常常使用时域显式解法来模拟系统的动态响应。
时域显式解法是一种基于运动微分方程的数值算法,通过离散化时间和空间域,将连续的变化转化为离散的数值计算,从而得到系统在任意时刻的状态。
时域显式解法的核心思想是将系统的运动微分方程转化为差分方程,然后通过迭代计算,得到系统随时间的演化过程。
在车桥耦合系统的研究中,我们通常需要考虑多个关键因素,如车辆的行驶速度、路面的不平度、车轮和车桥的刚度等。
这些因素会影响车辆的振动频率、振幅和相位差,因此在建立数学模型时需要充分考虑这些因素的影响。
在进行数值计算时,我们需要确定合适的时间和空间离散化步长,以保证计算结果的准确性和稳定性。
同时,我们还需要选择合适的数值方法,如欧拉法、Runge-Kutta法等,来对差分方程进行求解。
这些数值算法能够有效地模拟车桥耦合系统的振动行为,并提供详细的振动参数信息。
通过时域显式解法,我们可以得到车桥耦合系统在任意时刻的振动状态,进而分析振动的特征和规律。
这些信息对于优化车辆的设计和改善乘坐舒适性具有重要的指导意义。
例如,我们可以通过调整车辆的悬挂系统来降低振动的幅值和频率,从而提高车辆的乘坐舒适性。
此外,对于道路设计者来说,我们可以利用时域显式解法来评估不同路面的影响,从而为道路建设提供参考依据。
总之,时域显式解法是研究车桥耦合系统随机振动问题的重要方法,它能够提供详细的振动信息和参数,对于优化车辆设计和改善乘坐舒适性具有重要的指导意义。
通过深入研究和应用时域显式解法,我们可以不断改进车辆的设计和道路的建设,进一步提升车辆的性能和乘坐舒适度。
基于车桥耦合振动的桥梁动应力分析及疲劳性能评估一、本文概述随着交通运输业的快速发展,桥梁作为交通网络的关键节点,其安全性与耐久性越来越受到人们的关注。
在桥梁运营过程中,车辆与桥梁之间的相互作用会产生复杂的振动现象,这种现象被称为车桥耦合振动。
车桥耦合振动不仅影响行车的平稳性,还会对桥梁结构产生动应力,进而影响桥梁的疲劳性能。
因此,对基于车桥耦合振动的桥梁动应力分析及疲劳性能评估进行研究具有重要的理论价值和现实意义。
本文旨在深入探讨车桥耦合振动对桥梁动应力和疲劳性能的影响机制,通过理论分析和数值模拟相结合的方法,建立桥梁动应力分析及疲劳性能评估的理论框架。
文章首先回顾了车桥耦合振动理论的发展历程和研究现状,然后详细阐述了车桥耦合振动的基本原理和计算方法。
在此基础上,建立了桥梁动应力的分析模型,并通过实例验证了模型的有效性和准确性。
随后,文章进一步探讨了桥梁疲劳性能评估的方法和技术,结合工程实例进行了详细的分析和讨论。
本文的研究结果将为桥梁设计、施工和维护提供重要的理论依据和技术支持,有助于提升桥梁的安全性和耐久性,推动交通运输业的可持续发展。
本文的研究方法和成果也可为其他相关领域的研究提供有益的参考和借鉴。
二、车桥耦合振动理论基础车桥耦合振动分析是桥梁动力学领域的重要研究方向,旨在揭示车辆与桥梁结构之间相互作用对桥梁动力响应的影响。
车桥耦合振动涉及多个复杂因素,包括车辆动力学特性、桥梁结构特性以及车桥之间的相互作用力。
在车辆动力学方面,需要考虑车辆的质量分布、悬挂系统刚度与阻尼、车轮与轨道之间的接触特性等因素。
这些因素直接影响车辆自身的振动特性,进而影响到车桥耦合振动中的动力传递。
桥梁结构特性则包括桥梁的跨度、截面形状、材料特性以及支撑条件等。
桥梁结构的动力学特性对车桥耦合振动响应起着决定性作用。
例如,桥梁的固有频率、模态振型等参数会直接影响车桥耦合振动的动力传递和分布。
车桥之间的相互作用力是车桥耦合振动的核心问题。
章采用随机振动的虚拟激励法,将轨道不平顺激励转化为虚拟激励,并利用MATLAB软件自编程序,采用数值方法分离迭代求解系统的虚拟响应,进而求得列车与桥梁子系统随机响应的时变功率谱和标准差,据此分析了系统的随机振动特性。
关键词:非平稳随机振动 车桥耦合系统 虚拟激励法1.列车—桥梁耦合系统动力学方程1.1桥梁子系统运动方程采用平面梁单元法对桥梁结构进行离散,桥梁子系统运动方程见式(1)。
(1)式(1)中:平面梁单元节点有3个自由度,,-梁单元节点的轴向位移;-竖向位移;-面内转角;-质量矩阵;-阻尼矩阵;-刚度矩阵;-外力矩阵。
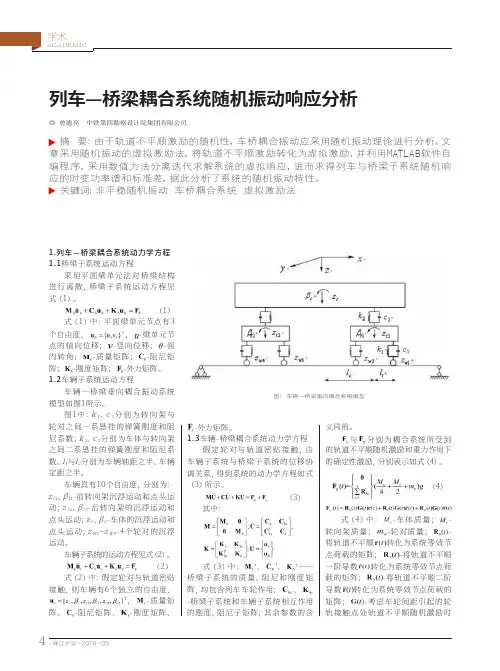
1.2车辆子系统运动方程车辆—桥梁垂向耦合振动系统模型如图1所示。
图1中:k 1、c 1分别为转向架与轮对之间一系悬挂的弹簧刚度和阻尼系数;k 2、c 2分别为车体与转向架之间二系悬挂的弹簧刚度和阻尼系数。
l t 与l c 分别为车辆轴距之半、车辆定距之半。
车辆具有10个自由度,分别为:z t 1、βt 1-前转向架沉浮运动和点头运动;z t 2、βt 2-后转向架的沉浮运动和点头运动;z c 、βc -车体的沉浮运动和点头运动;z w 1~z w 4-4个轮对的沉浮运动。
车辆子系统的运动方程见式(2)。
(2)式(2)中:假定轮对与轨道密贴接触,则车辆有6个独立的自由度,T,-质量矩阵、-阻尼矩阵、-刚度矩阵、-外力矩阵。
1.3车辆-桥梁耦合系统动力学方程假定轮对与轨道密贴接触,由车辆子系统与桥梁子系统的位移协调关系,得到系统的动力学方程如式(3)所示。
(3)其中:式(3)中:、、——桥梁子系统的质量、阻尼和刚度矩阵,均包含列车车轮作用;、-桥梁子系统和车辆子系统相互作用的刚度、阻尼子矩阵;其余参数的含义同前。
与分别为耦合系统所受到的轨道不平顺随机激励和重力作用下的确定性激励,分别表示如式(4)。
(4)式(4)中:-车体质量;-转向架质量;-轮对质量;-将轨道不平顺转化为系统等效节点荷载的矩阵;-将轨道不平顺一阶导数转化为系统等效节点荷载的矩阵;-将轨道不平顺二阶导数转化为系统等效节点荷载的矩阵;-考虑车轮间距引起的轮轨接触点处轨道不平顺随机激励时图1 车辆—桥梁垂向耦合系统模型4/ 珠江水运·2018·05滞性的矩阵;-第i个车轮所受的作用力向桥梁子系统有限元模型平面梁单元节点分解时所用的分解向量。
车辆与桥梁耦合系统振动理论浅析[摘要]随着桥梁结构的轻型化以及车辆载重、车速的提高,车辆加速度的存在,车辆过桥引起的车桥振动问题越来越引起工程界的关注。
【关键词】耦合振动;简支梁;模型;冲击系数1.车桥振动的的特点车辆通过桥梁时将引起桥梁结构的振动,而桥梁的振动又反过来影响车辆的振动,这种相互作用、相互影响的问题就是车辆和桥梁之间振动耦合的问题。
车桥之间的振动是一种司耦合振动,它具有时变、自激、随机的特点。
2.车桥耦合动力问题的历史与现状车桥振动的研究已有100多年的历史,最先开展研究的是铁路桥梁的车振问题,随着铁道工程建设的发展,移动荷载对桥梁结构的动力作用问题引起人们普遍地关注。
铁路桥梁车激振动的主要特征是列车荷载的轴重大,轴距排列规律性较强,钢轮在钢轨上运行具有蛇行特征,因此,车辆过桥除了激起桥梁竖向振动外,还有较大的横向振动,因此铁路桥梁除了研究竖向振动外,还需研究桥梁横向振动,其主要研究的内容为桥梁的动态响应和车辆过桥的动态响应,如桥梁的冲击系数、横向振幅、以及桥梁的竖横向加速度、桥梁的合理竖向、横向的刚度限值和车辆过桥的加速度以及平稳性等;公路桥梁的车激振动的特征主要表现为过桥车辆的轴重、轴距的多样性和随机性,公路桥梁主要关心的是桥梁的竖向振动,研究的内容主要为桥梁的动态响应如冲击系数等,由于轮胎与路面的作用与钢轮与钢轨作用不同,公路桥梁的车激横向振动不太剧烈,因此,车激桥梁的横向振动基本上不予考虑。
尽管铁路与公路桥梁的车激振动的研究范围有些差别,但是,车桥振动研究的主要原理和基本方法是相同的,都具有时变、自激,随机性的特点。
回顾100多年来车桥振动研究的历程,可以大致的分为两个阶段,即车桥振动研究古典理论阶段和车桥振动研究现代理论阶段。
3.车桥振动的古典理论3.1古典理论的实桥试验研究1907年1910年期间,美国第一次进行了规模比较大的现场实测工作,用各种类型的机车以不同速度通过21根板梁和24座析梁桥,测定桥梁的最大动力响应,第一次提出了冲击系数的关系,通过试验得出了跨度、车速和冲击作用间的关系,制订了冲击系数曲线,并得出了明确的概念:对于蒸汽机车来说,移动荷载的动力作用主要是由动轮偏心块的周期力所引起的。
三跨连续梁桥车–桥耦合振动分析摘要:随着我国经济和交通运输事业的迅猛发展,桥梁结构逐渐趋向于轻型化、多功能化,对结构动力响应性能有了越来越高的要求。
因此,车辆荷载等动力荷载对桥梁结构的冲击效应,已成为桥梁科研、设计计算、施工、运营养护过程中的重要问题之一。
桥梁冲击系数是反映结构动力性能的关键性参数之一,本文在ANSYS中建立有限元模型,以112米的三跨连续梁桥为依托工程,应用已建立的模型,进行车桥共振响应分析,并在标准汽车荷载作用下车桥耦合作用与桥梁刚度、质量等参数对连续梁桥冲击系数的影响进行了详细研究。
关键词:桥梁冲击系数;连续梁桥;车桥耦合作用0引言由于车辆及车辆自身的振动状态,会引起并影响桥梁的振动状态,而桥梁的振动状态又逆向影响着车辆的振动状态。
这种车桥间的振动状态相互关联、相互影响的问题就是车辆与桥梁结构之间的车桥振动耦合的问题。
1车桥耦合动力分析模型建立本文采用36m+40m+36m三跨连续箱梁桥进行车桥耦合分析,箱梁尺寸如图1所示。
图1主要截面尺寸(单位:mm)桥梁模型的建立采用有限元软件ANSYS,材料的弹性模量为32.5GPa,密度为2549kg/m3,泊松比为0.2。
选用实体单元Solid6进行模拟,以获取较高的精度,建模过程使用APDL语言编写程序导出桥梁的频率向量和模态振型矩阵,用于后续的车桥耦合振动分析。
2桥梁技术参数对冲击系数的影响为了了解桥梁自身性质对桥梁桥梁冲击系数的具体影响,我们选取了不同车速(20km/h、40km/h、60km/h、80km/h)下,利用ANSYS标准汽车荷载车桥耦合作用模型,分别对桥梁刚度、质量进行影响分析。
2.1弹性模量的影响车辆以相同速度通过刚度不同的桥梁时冲击系数的数据,为了进行直观的比较分析,将不同速度下弹性模量的变化对冲击系数的影响图绘制如图8所示。
图2不同速度下弹性模量的变化对冲击系数的影响从图2得到以下结论:1)车的运行速度越小,桥梁刚度对桥梁冲击系数的影响越小;2)不同的速度下,桥梁刚度对桥梁冲击系数的影响为随着桥梁刚度的增加桥梁冲击系数先增大后减小,再增大;3)通过不同速度下的图形对比,发现随着速度的增加,桥梁冲击系数的第一次峰值所对应的桥梁刚度也会越来越大。
车-桥耦合振动对大纵坡桥梁的影响分析叶鹏飞打毛国辉打俞博2(1.江西省天驰高速科技发展有限公司,江西南昌332000)(2.江西省长大桥隧研究设计院有限公司,江西南昌330200)摘要:文章利用Ansys APDL语言二次开发,开发了车-桥耦合振动约束方程法的求解计算程序,并利用该程序分析车辆以匀变速度通过桥梁时,对桥梁纵向振动的影响,并将分析结果与桥梁规范中的汽车制动力进行比较,得出车-桥耦合振动对桥梁纵向位移影响程度。
关键词:车-桥耦合;大纵坡;制动力0前言我国有着广阔的山区,沟壑、山地和高原分布面积大。
为降低桥梁高度和减少工程造价,许多山区公路的桥梁纵坡接近4%,匝道部分纵坡达4%以上。
大纵坡、高墩、大跨度成为山区高速公路桥梁的重要特征。
桥梁在设计时,桥面纵向水平力计算主要依据《公路桥涵设计通用规范》,没有考虑车辆在桥上行加速、减速驶过程中耦合振动对大纵坡桥梁产生的动态影响。
本文基于Ansys平台开发了车-桥耦合振动约束方程分析法,对车辆过桥时车桥耦合振动对桥梁纵向位移的影响程度进行分析。
1桥梁规范中的汽车制动力计算根据《公路桥涵设计通用规范JTGD60-2015》(以下简称桥梁通规)可知,汽车制动力是根据同向行驶汽车活载进行计算确定,计算制动力是汽车活载不考虑冲击系数。
具体规定如下:(1)汽车制动力标准值:根据《桥梁通规》规定的每个车道上的汽车制动力标准值为其对应车道荷载在其对应的加载长度(需要考虑纵向折减)上的荷载总和的10%,对公路-I级荷载汽车制动力标准值不小于165kN,对公路-域级荷载汽车制动力标准值不小于90kN;(2)横向折减系数,根据《桥梁通规》规定同向行驶多车道需要考虑横向折减系数,2车道的汽车制动力标准值应为1车道的2倍,3车道的汽车制动力标准值应为1车道的2.34倍,4车道的汽车制动力标准值应为1车道的2.68倍;(3)制动力作用点:根据《桥梁通规》规定汽车制动力的作用点为桥面以上1.2m处,但是在进行计算墩台时,制动力的作用点可移动至支座铰中心或底座面处;在进行刚构桥、拱桥计算时,制动力的作用点可移动至桥面,但不应考虑因此产生的附加竖向力和力矩;(4)板式支座制动力传递:对于简支梁、桥面连续简支梁、柔性墩台的连续梁排架设置板式橡胶支座,制动力应按照支座和墩台抗推刚度集成进行分配和传递。
公路桥梁车桥耦合振动研究【摘要】近年来,我国路桥工程建设为交通行驶创造了优越的环境,推动了地区之间的经济文化交流,促进了国民经济收入水平的提高。
与发达国家相比,国内路桥施工技术相对落后,对动力学理论研究不足误导了后期作业秩序,限制了路桥结构性能的充分发挥。
“车桥耦合振动”现象是路桥交通的常见现象,若控制不当则会影响路桥的使用寿命及运行状态。
针对这一点,本文分析了影响车桥耦合振动的相关因素,并通过计算机建立自动分析平台,为路桥交通的正常运行提供了帮助。
【关键词】路桥;耦合振动;成因;处理对策耦合振动是动力学理论中研究的重点,对不同物体在不同状态下的受力情况进行了详细地分析。
车桥耦合振动是由于车辆与路桥结构之间产生相互的力作用,两种受力荷载大小相同时易产生车桥耦合振动现象,约束了路桥结构性能的正常发挥,不利于交通行驶的安全运行。
工程单位在维护路桥工程阶段,应加强车桥耦合振动的分析,结合具体原因制定有效的控制对策。
一、车桥耦合振动研究的现状从本质上看,车桥耦合振动是一种相互性的力学作用,力学作用控制不当会限制路桥性能的发挥。
车辆过桥时会引起桥梁的振动,桥梁的振动反过来也会影响车辆的振动,即形成车桥耦合振动问题。
当前,我国公路交通运输的全面提速,为了有效的对既有桥梁运营状态进行评估,以及对新建、改建桥梁进行优化设计,均需对车辆过桥时的车桥耦合振动问题进行分析[1]。
随着公路交通事业的迅速发展,车辆与桥梁结构的动力相互作用越来越受到重视。
车辆和桥梁间力学作用形式多样,会呈现出不同的动力特点,如:车辆的动力特性,车型、阻尼、自振频率等;桥梁结构的动力特性,质量与刚度分布、桥跨结构形式、材料阻尼等;桥头引道和桥面的平整状态、伸缩缝装置及桥头沉陷的状况。
而计算机仿真模拟是目前最方便、最快捷、最经济的计算分析方法。
二、计算机力学模型研究的优点从长远角度考虑,选择一种通用性强、应用性广、开发前景广阔的研究模式,分析车桥耦合振动响应具有多方面的意义。