自动控制原理-5.5-开环频率指标和闭环频率特性-(7)
- 格式:ppt
- 大小:784.00 KB
- 文档页数:24
第5章频率特性法频域分析法是一种图解分析法,可以根据系统的开环频率特性去判断闭环系统的性能,并能较方便地分析系统参量对系统性能的影响,从而指出改善系统性能的途径,已经发展成为一种实用的工程方法,其主要内容是:1)频率特性是线性定常系统在正弦函数作用下,稳态输出与输入的复数之比对频率的函数关系。
频率特性是传递函数的一种特殊形式,也是频域中的数学模型。
频率特性既可以根据系统的工作原理,应用机理分析法建立起来,也可以由系统的其它数学模型(传递函数、微分方程等)转换得到,或用实验法来确定。
2)在工程分析和设计中,通常把频率特性画成一些曲线。
频率特性图形因其采用的坐标不同而分为幅相特性(Nyquist图)、对数频率特性(Bode图)和对数幅相特性(Nichols图)等形式。
各种形式之间是互通的,每种形式有其特定的适用场合。
开环幅相特性在分析闭环系统的稳定性时比较直观,理论分析时经常采用;波德图可用渐近线近似地绘制,计算简单,绘图容易,在分析典型环节参数变化对系统性能的影响时最方便;由开环频率特性获取闭环频率指标时,则用对数幅相特性最直接。
3)开环对数频率特性曲线(波德图)是控制系统分析和设计的主要工具。
开环对数幅频特性L(ω)低频段的斜率表征了系统的型别(v),其高度则表征了开环传递系数的大小,因而低频段表征系统稳态性能;L(ω)中频段的斜率、宽度以及幅值穿越频率,表征着系统的动态性能;高频段则表征了系统抗高频干扰的能力。
对于最小相位系统,幅频特性和相频特性之间存在着唯一的对应关系,根据对数幅频特性,可以唯一地确定相应的相频特性和传递函数。
4)奈奎斯特稳定性判据是利用系统的开环幅相频率特性G(jω)H(jω)曲线,又称奈氏曲线,是否包围GH平面中的(-l,j0)点来判断闭环系统的稳定性。
利用奈奎斯特稳定判据,可根据系统的开环频率特性来判断闭环系统的稳定性,并可定量地反映系统的相对稳定性,即稳定裕度。
稳定裕度通常用相角裕量和幅值裕量来表示。
自动控制原理第五版:《自动控制原理第五版》是科学出版社出版的图书,作者是胡寿松。
本书精选了第四版中的主要内容,加强了对基本理论及其工程应用的阐述。
内容提要:本书系《自动控制原理》第五版,比较全面地阐述了自动控制的基本理论与应用。
全书共分十章,前八章着重介绍经典控制理论及应用,后两章介绍现代控制理论中的线性系统理论和最优控制理论。
书中深入浅出地介绍了自动控制的基本概念,控制系统在时域和复域中的数学模型及其结构图和信号流图;比较全面地阐述了线性控制系统的时域分析法、根轨迹法、频域分析法以及校正和设计等方法;对线性离散系统的基础理论、数学模型、稳定性及稳态误差、动态性能分析以及数字校.图书目录:第五版前言第一章自动控制的一般概念1-1 自动控制的基本原理与方式1-2 自动控制系统示例1-3 自动控制系统的分类1-4 对自动控制系统的基本要求1-5 自动控制系统的分析与设计工具习题第二章控制系统的数学模型2-1 控制系统的时域数学模型2-2 控制系统的复数域数学模型2-3 控制系统的结构图与信号流图2-4 控制系统建模实例习题第三章线性系统的时域分析法3-1 系统时间响应的性能指标3-2 一阶系统的时域分析3-3 二阶系统的时域分析3-4 高阶系统的时域分析3-5 线性系统的稳定性分析3-6 线性系统的稳态误差计算3-7 控制系统时域设计习题第四章线性系统的根轨迹法4-1 根轨迹法的基本概念4-2 根轨迹绘制的基本法则4-3 广义根轨迹4-4 系统性能的分析4-5 控制系统复域设计习题第五章线性系统的频域分析法5-1 频率特性5-2 典型环节与开环系统的频率特性5-3 频率域稳定判据5-4 稳定裕度5-5 闭环系统的频域性能指标5-6 控制系统频域设计习题第六章线性系统的校正方法6-1 系统的设计与校正问题6-2 常用校正装置及其特性6-3 串联校正6-4 反馈校正6-5 复合校正6-6 控制系统校正设计习题第七章线性离散系统的分析与校正7-1 离散系统的基本概念7-2 信号的采样与保持7-3 z变换理论7-4 离散系统的数学模型7-5 离散系统的稳定性与稳态误差7-6 离散系统的动态性能分析7-7 离散系统的数字校正7-8 离散控制系统设计习题第八章非线性控制系统分析8-1 非线性控制系统概述8-2 常见非线性特性及其对系统运动的影响8-3 相平面法8-4 描述函数法8-5 非线性控制的逆系统方法8-6 非线性控制系统设计习题第九章线性系统的状态空间分析与综合9-1 线性系统的状态空间描述9-2 线性系统的可控性与可观测性9-3 线性定常系统的反馈结构及状态观测器9-4 李雅普诺夫稳定性分析9-5 控制系统状态空间设计习题第十章动态系统的最优控制方法10-1 最优控制的一般概念10-2 最优控制中的变分法10-3 极小值原理及其应用10-4 线性二次型问题的最优控制10-5 动态规划10-6 控制系统优化设计习题参考文献附录A 傅里叶变换和拉普拉斯变换附录B 矩阵微分法附录C MATLAB辅助分析与设计法。
5.6 利用开环频率特性分析系统的性能在频域中对系统进行分析、设计时,通常是以频域指标作为依据的,但是不如时域指标来得直接、准确。
因此,须进一步探讨频域指标与时域指标之间的关系。
考虑到对数频率特性在控制工程中应用的广泛性,本节将以Bode 图为基点,首先讨论开环对数幅频特性)(ωL 的形状与性能指标的关系,然后根据频域指标与时域指标的关系估算出系统的时域响应性能。
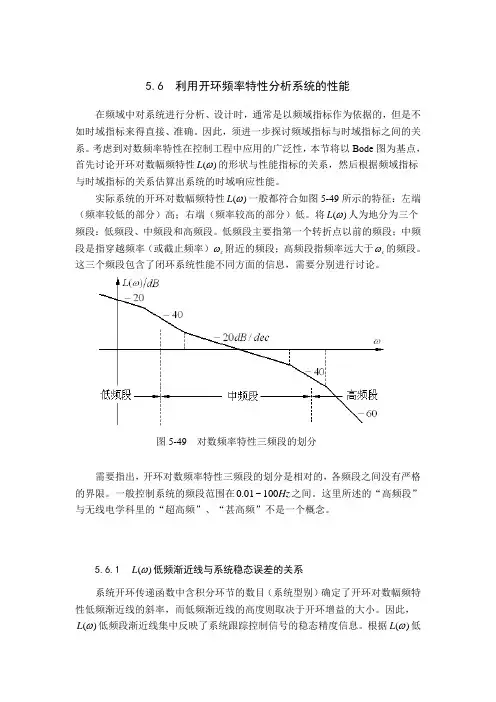
实际系统的开环对数幅频特性)(ωL 一般都符合如图5-49所示的特征:左端(频率较低的部分)高;右端(频率较高的部分)低。
将)(ωL 人为地分为三个频段:低频段、中频段和高频段。
低频段主要指第一个转折点以前的频段;中频段是指穿越频率(或截止频率)c ω附近的频段;高频段指频率远大于c ω的频段。
这三个频段包含了闭环系统性能不同方面的信息,需要分别进行讨论。
需要指出,开环对数频率特性三频段的划分是相对的,各频段之间没有严格的界限。
一般控制系统的频段范围在Hz 100~01.0之间。
这里所述的“高频段”与无线电学科里的“超高频”、“甚高频”不是一个概念。
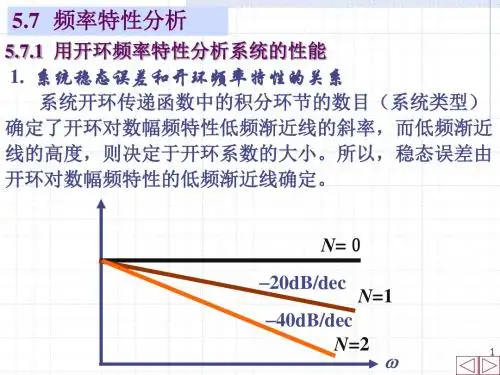
5.6.1 )(ωL 低频渐近线与系统稳态误差的关系系统开环传递函数中含积分环节的数目(系统型别)确定了开环对数幅频特性低频渐近线的斜率,而低频渐近线的高度则取决于开环增益的大小。
因此,)(ωL 低频段渐近线集中反映了系统跟踪控制信号的稳态精度信息。
根据)(ωL 低图5-49 对数频率特性三频段的划分频段可以确定系统型别υ和开环增益K ,利用第3章中介绍的静态误差系数法可以确定系统在给定输入下的稳态误差。
5.6.2 )(ωL 中频段特性与系统动态性能的关系开环对数幅频特性的中频段是指穿越(或截止)频率c ω附近的频段。
设开环部分纯粹由积分环节构成,图5-50(a )所示的对数幅频特性对应一个积分环节,斜率为dec dB /20-,相角 90)(-=ωϕ,因而相角裕度 90=γ;图5-50(b )的对数幅频特性对应两个积分环节,斜率为dec dB /40-,相角 180)(-=ωϕ,因而相角裕度 0=γ。



《自动控制原理》第五章线性系统的频域分析与校正西北工业大学自动化学院1.频率特性的基本概念2. 幅相频率特性(Nyquist图)3. 对数频率特性(Bode图)4.频域稳定判据5. 稳定裕度6. 利用开环频率特性分析系统的性能7.利用闭环频率特性分析系统的性能8.频率法串联校正频域分析法特点(1)研究稳态正弦响应的幅值和相角随输入信号频率的变化规律(2)由开环频率特性研究闭环系统的性能(3)图解分析法(4)有一定的近似性5.1 频率特性的基本概念RC 电路如图所示,u r (t )=A sin ωt , 求u c (t )=?建模[]r c=+CR 1U s U ()1()()CR 1c r U s G s ==U s s +例1 r c=+R u i u c=C i u r c c=+CR u u u 频率响应()()()c r s s =====+++T CR 111T CR 1T 11TU G s U s s s 0122222()c +=⋅=+++++1T 1T 1T C A ωC s C U s s s s s ωω02222lim →−==++1T T T 1T s A A C s ωωωω222=+1T A C ωω122-=+T 1T A C ωω222222222222()c ⎡⎤=⋅+⋅−⋅⎢⎥+++++++⎣⎦T 11T 1T 1T 1T 1T 1T A A s U s s s s ωωωωωωωωωRC 电路如图所示,u r (t )=A sin ωt , 求u c (t )=?例1 []T 2222T ()sin cos cos sin 1T 1Tt c A A u t e t t ωωαωαωω−=+⋅−⋅++22−=++T T 1Tt A e ωω频率响应:线性系统稳态正弦响应的幅值、相角随输入频率的变化规律。
22()sin(-arctan T)1T s A c t t ωωω=+()sin r t A tω=RC 电路频率特性G (j ω)的定义:()()()=∠j j j G G G ωωω()sin r t A t ω=22()sin(-arctan T)1T s A c t t ωωω=+22()()()==+s 1j 1T c t G r t ωωs ()()()arctan ∠=∠−∠=−j T G c t r t ωω幅频特性相频特性频率特性的获取方法:()()==j j s G G s ωω=−221arctan T 1T ωω∠+=∠++111j T 1j T ωω1=1+j T ωj 1T 1s ωs =+()sin r t A t ω=22()sin(-arctan T)1T s A c t t ωωω=+系统模型间的关系总结()()()=∠j j j G G G ωωωs 22()()()==+1j 1T c t G r t ωωs ()()()∠=∠−∠=−j arctan T G c t r t ωωG(j ω)的定义:G(j ω)的获取方法:()()==j j s G G s ωω感谢聆听,下节再见。
主要内容系统闭环频率特性通过频率特性曲线分析稳态性能指标频域动态性能指标频率域特性指标与时域瞬态指标的关系2)()(1)()()(1s H s G s H s G s H +⋅=4环幅频特性。
闭环幅频特性曲线闭环对数幅频曲线二、由闭环频率特性分析系统的时域响应频率特性分析法比时域性能分析简便,且有成熟的图解法可供使用,但频率特性分析是一种概略性的间接方法,在要求系统性能指标直接而具体时,还需从时域响应面进行讨论。
在已知闭环系统稳定的条件下,可根据系统的闭环幅频特性曲线,对系统的动态过程进行定性分析与定量估算。
51、通常的闭环频域有以下几个指标:V零频幅值:ω=0时闭环幅频特性的数值(反映系统静差(误差))V谐振频率ωr:闭环系统频率特性出现谐振峰值时的频率值V谐振峰值M r:系统闭环频率特性幅值的最大值,反映系统的平稳性,并非所有闭环频率特性的中频段有谐振峰值,若出现了谐振峰值,表明系统的阻尼比较小615M r、σ与ζ的关系曲线当相角裕量γ为30o ~60o 时,对应二阶系统的阻尼比ζ为0.3~0.6在ζ≤0.707时,二阶系统的相角裕量γ与阻尼比ζ之间的关系近似为:ζ=0.01γV谐振频率ωr表征系统瞬态响应的速度。
ωr值越大,响应时间越快。
对于弱阻尼系统(ζ较小),谐振频率ωr与阶跃响应的阻尼振荡频率ωd接近。
V截止频率(带宽频率)ωb当系统闭环幅频特性的幅值M(ω)降到零频率幅值的0.707(或零分贝值以下3dB)时,对应的频率ωb称为截止频率。
0~ωb的频率范围称为带宽它反映系统的快速性和低通滤波特性。
V剪切率ωc幅值=1时的频率ωc,称为剪切率,它既反映系统的相角裕度(相角裕度大,剪切率应较平缓),又表征系统从噪声中辨别信号的能力(剪切率平缓,带宽ωb大,对高频噪声的抑制不利)。
17应注意,剪切频率ωc处斜率平缓(如以-20dB/dec过0dB线)时,系统相角裕量大;而斜率陡峭时,说明具有负相角的环节集图5 剪切率中叠加于此,带来大的负相角,如图5所示,则易造成系统不稳定。
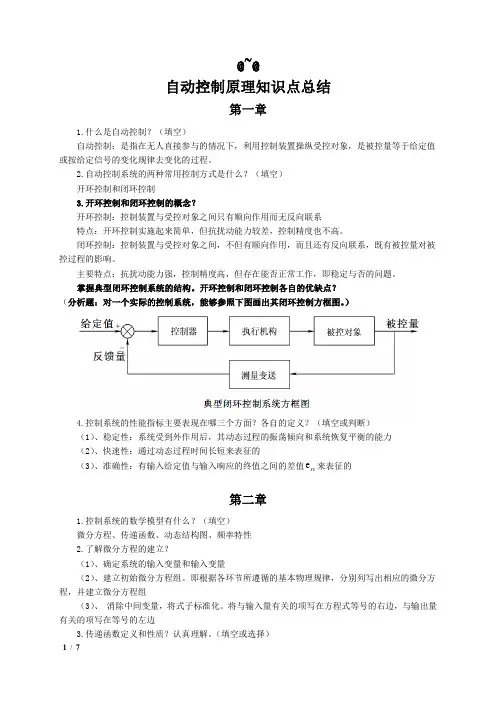
@~@自动控制原理知识点总结第一章1.什么是自动控制?(填空)自动控制:是指在无人直接参与的情况下,利用控制装置操纵受控对象,是被控量等于给定值或按给定信号的变化规律去变化的过程。
2.自动控制系统的两种常用控制方式是什么?(填空)开环控制和闭环控制3.开环控制和闭环控制的概念?开环控制:控制装置与受控对象之间只有顺向作用而无反向联系特点:开环控制实施起来简单,但抗扰动能力较差,控制精度也不高。
闭环控制:控制装置与受控对象之间,不但有顺向作用,而且还有反向联系,既有被控量对被控过程的影响。
主要特点:抗扰动能力强,控制精度高,但存在能否正常工作,即稳定与否的问题。
掌握典型闭环控制系统的结构。
开环控制和闭环控制各自的优缺点?(分析题:对一个实际的控制系统,能够参照下图画出其闭环控制方框图。
)4.控制系统的性能指标主要表现在哪三个方面?各自的定义?(填空或判断)(1)、稳定性:系统受到外作用后,其动态过程的振荡倾向和系统恢复平衡的能力(2)、快速性:通过动态过程时间长短来表征的e来表征的(3)、准确性:有输入给定值与输入响应的终值之间的差值ss第二章1.控制系统的数学模型有什么?(填空)微分方程、传递函数、动态结构图、频率特性2.了解微分方程的建立?(1)、确定系统的输入变量和输入变量(2)、建立初始微分方程组。
即根据各环节所遵循的基本物理规律,分别列写出相应的微分方程,并建立微分方程组(3)、消除中间变量,将式子标准化。
将与输入量有关的项写在方程式等号的右边,与输出量有关的项写在等号的左边3.传递函数定义和性质?认真理解。
(填空或选择)传递函数:在零初始条件下,线性定常系统输出量的拉普拉斯变换域系统输入量的拉普拉斯变换之比5.动态结构图的等效变换与化简。
三种基本形式,尤其是式2-61。
主要掌握结构图的化简用法,参考P38习题2-9(a)、(e)、(f)。
(化简)等效变换,是指被变换部分的输入量和输出量之间的数学关系,在变换前后保持不变。
第五章 频域分析法目的:①直观,对高频干扰的抑制能力。
对快(高频)、慢(低频)信号的跟踪能力。
②便于系统的分析与设计。
③易于用实验法定传函。
§5.1 频率特性一. 定义)()()()(1n p s p s s s G +⋅⋅⋅+=θ在系统输入端加一个正弦信号:t R t r m ωsin )(⋅=))(()(22ωωωωωj s j s R s R s R m m -+⋅=+⋅=↔ 系统输出:))(()()()()(1ωωωθj s j s R p s p s s s Y m n-+⋅⋅+⋅⋅⋅+=t j t j e A e A t y t y ωω⋅+⋅+=↔-瞬态响应)()(1若系统稳定,即)(s G 的极点全位于s 左半平面,则 0)(l i m 1=∞→t y t稳态响应为:tj tj ss eA eA t y ωω⋅+⋅=-)(而)(21)()(22ωωωωωj G R jj s s R s G A m j s m -⋅-=+⋅+⋅⋅=-=)(21)()(22ωωωωωj G R jj s s R s G A m j s m ⋅=-⋅+⋅⋅== ∴t j m tj m ss e j G R je j G R j t y ωωωω⋅⋅+⋅-⋅-=-)(21)(21)( =])()([21t j t j m e j G e j G R jωωωω-⋅--⋅⋅ 又)(s G 为s 的有理函数,故)()(*ωωj G j G -=,即φωωj e j G j G )()(= φωωj e j G j G -=-)()(∴][)(21)()()(φωφωω+-+--⋅=t j t j mss e e j G R jt y =)sin()(φωω+⋅⋅t j G R m =)sin(φω+⋅t Y m可见:对稳定的线性定常系统,加入一个正弦信号,其稳态响应也是一个同频率的正弦信号。
其幅值是输入正弦信号幅值的)(ωj G 倍,其相移为)(ωφj G ∠=。
1.控制概念(1)开环控制:开环控制是最简单的一种控制方式。
它的特点是,按照控制信息传递的路径,控制量与被控制量之间只有前向通路而没有反馈通路。
闭环控制:凡是将系统的输出量反送至输入端,对系统的控制作用产生直接的影响,都称为闭环控制系统或反馈控制系统。
复合控制:是开、闭环控制相结合的一种控制方式。
(2)反馈:指将系统的输出返回到输入端并以某种方式改变输入,进而影响系统功能的过程,即将输出量通过恰当的检测装置返回到输入端并与输入量进行比较的过程。
(3)传递函数:在零初始条件下,系统输出信号的拉手变换与输出信号的拉氏变换的比。
(4)被控对象:指需要给以控制的机器、设备或生产过程。
执行机构:一种能提供直线或旋转运动的驱动装置,它利用某种驱动能源并在某种控制信号作用下工作。
(5)线性化:a条件:连续且各阶导数存在 b方法:工作点附近泰勒级数展开。
2.时域指标(1)上升时间tr:响应从终值10%上升到终值90%所需时间;对有振荡系统亦可定义为响应从零第一次上升到终值所需时间。
上升时间是响应速度的度量。
峰值时间tp:响应超过其终值到达第一个峰值所需时间。
调节时间ts:响应到达并保持在终值内所需时间。
(2)超调量σ%:响应的最大偏离量h(tp)与终值h(∞)之差的百分比。
振荡次数:是在阶跃信号作用下,系统在达到指定deta范围下,系统所震荡的总次数。
(3)动态降落:系统稳定运行时,突然加一个扰动量N,在过度过程中引起输出量的最大降落值Cmax称为动态降落。
恢复时间:系统从波动回复到稳态时候所需要的时间。
(4)稳态误差:对单位负反馈系统,当时间t趋于无穷大时,系统对输入信号响应的实际值与期望值(即输入量)之差的极限值,称为稳态误差,它反映系统复现输入信号的(稳态)精度。
3.频域特性(1)频率特性:对于线性系统来说,当输入信号为正弦信号时,稳态时的输出信号是一个与输入信号同频率的正弦信号,不同的只是其幅值与相位,且幅值与相位随输入信号的频率不同而不同。
《自动控制原理》课程标准第一部分课程概述一、课程名称中文名称:《自动控制原理》英文名称:《Automatic control theory》二、学时与适用对象课程总计72学时,其中理论课62学时,实验10学时。
本标准适用于三年制专科机械工程专业。
三、课程地位、性质《自动控制原理》是研究自动控制共同规律的技术科学,是工科高等院校电类、控制类、机械类等专业的一门主干技术基础课程。
该课程的开设重在使学生掌握与自动控制原理相关的专业知识和综合应用能力,培养解决自动控制系统调试与维护方面实际问题的能力。
掌握和了解自动控制的基本理论和方法,对从事机械工程专业的工程技术人员是很有必要的。
四、课程基本理念本课程的教学应把握以下几点基本原则:一是增加对前沿和最具特色机械装备研发、使用、推广等背景知识的介绍,激发学员对该课程的探索兴趣;二是突出从理工类专业的角度理解设备运行原理和设计思路的方法,向学员强调学好这门课必须具备数学、电子学、计算机软硬件方面坚实的知识基础,重在自动控制系统的分析与改进,体现有别于理工院校自动控制课程的强调理论探索、侧重系统设计及实现等的教学模式;三是鼓励学员查询相关资料、书籍,不要满足于仅仅了解系统原理的简单程度,强化学员的自学能力,培养获取并运用信息的能力,为今后从事机械装备的创新型革新及研制打好基础;四是注重与学员的交流、并积极引导学员之间的相互交流,培养良好协作的团队精神。
五、课程设计思路在本课程开设之前,学员已经具备了多门课程的先导知识。
在教学过程中,鼓励学员学习和使用MATLAB软件,对于课堂作业,通过MATLAB进行验证。
讲授中应力争多介绍自动化领域前沿成果,拓展学员的知识面,启发解决问题的思路。
在总结教学经验和研究成果的基础上,对课程目标分别从知识与技能、过程与方法、情感态度与价值观等方面进行具体明确的阐述。
1.依据课程特点,设计教学思路自动控制原理是研究在没有人直接参与的情况下,利用外加的设备或装置(称控制装置或控制器),使机器,设备或生产过程(统称被控对象)的某个工作状态或参数(即被控制量)自动地按照预定的规律运行的原理及技术,数学基础要求较高,理论性很强。