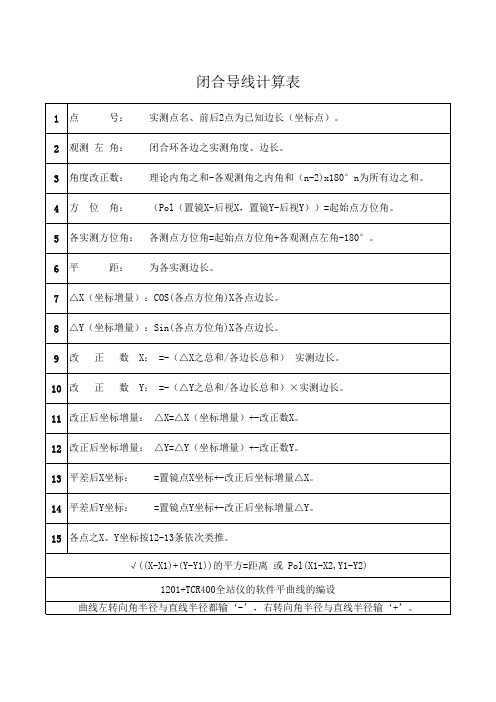
闭合导线测量表 (6个点)
- 格式:xls
- 大小:52.00 KB
- 文档页数:4
名称:闭合导线角度测量时间:2006年6月12日—2006年6月14日地点:画室周围参与人员:宋晓通徐基平刘阳戴松董立立赵健刘绪军李芹于静程培智张月宇宋毅崔孟收鲍冠杰薄银结林鹏涛乔勇郭佳内容:1、考核学生操作经纬仪进行测量角度的能力2、考核学生进行角度测量内业计算和角度闭合差计算的能力指导老师:步文萍王兴强秦原评分标准:1、严格按照测回法进行角度观测,以其他方式进行视为无效2、上下半回角度之差:︱β左—β右︱≤40’’为合格,允许进行重测,如最终上交资料上下半回角度之差超限视为无效3、四个点的导线的角度闭合差fβ=Σβ测—Σβ理=Σβ测—3600≤±404’’=±80’’,允许进行重测,如最终上交资料角度闭合差超限,视为成绩无效4、如为凑数涂改数据,取消比赛资格5、在同一精度下根据时间长短评定名称:高程测量比赛时间:2007年4月10号—2007年4月12号地点:北校园内参与人员:孙卫卫岳佳琪王昊韩振凯黄翠翠刘兆龙孙运浩刘波王治举张利英宋浩李方孙雪杨雪张玉涛张伟杨宇李翔刘灿灿内容:1、熟练掌握水准仪的使用(整平瞄准读数)2、布设成闭合路线,按图根控制的要求测出各图根点的高程3、在规定时间以及误差允许的范围内完成高程测量过程指导老师:王兴强李晓良评分标准:1、假定起始点的高程为100米,图根水准测量的视线长度≤100米,水准路线高程闭合差≤±40L mm,否则视为不合格(40分)2、在规定时间内完成20分3、内业计算准确30分4、精神面貌10分名称:校园测绘地点:北校园时间:2007年4月15日—20日参赛人员:内容:1、熟练掌握经纬仪、水准仪、钢卷尺等仪器的正确使用2、掌握小区域大比例尺地形图的测绘方法3、掌握正确处理各种测量数据的方法,加强“测、绘、算”的基本功4、培养科学、实干精神和协作能力指导老师:王兴强评分标准:1、平面控制测量(15分)2、高程控制测量(10分)3、碎部测量(25分)4、内业计算准确(25分)5、绘制地形图(35分)。
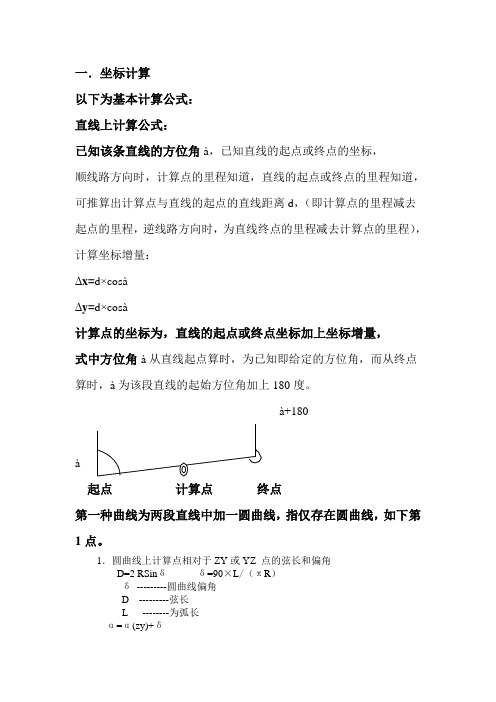
一.坐标计算以下为基本计算公式:直线上计算公式:已知该条直线的方位角à,已知直线的起点或终点的坐标,顺线路方向时,计算点的里程知道,直线的起点或终点的里程知道,可推算出计算点与直线的起点的直线距离d,(即计算点的里程减去起点的里程,逆线路方向时,为直线终点的里程减去计算点的里程),计算坐标增量:∆x=d×cosà∆y=d×cosà计算点的坐标为,直线的起点或终点坐标加上坐标增量,式中方位角à从直线起点算时,为已知即给定的方位角,而从终点算时,à为该段直线的起始方位角加上180度。
à+180à起点计算点终点第一种曲线为两段直线中加一圆曲线,指仅存在圆曲线,如下第1点。
1.圆曲线上计算点相对于ZY或YZ 点的弦长和偏角D=2 RSinδδ=90×L/(πR)δ---------圆曲线偏角D ---------弦长L --------为弧长α=α(zy)+δα------------为计算点的方位角,此α为顺着线路方向计算时。
α=α(yz)-δα------------为计算点的方位角,此α为逆着线路方向计算时。
α(zy)、α(yz)---------为圆曲线的起始方位角。
一般为已知。
计算点相对与直圆点或圆直点的坐标增量:△x=D*COSα△y=D*SINα坐标增量计算完毕后,要算某一点的坐标,用直圆点或圆直点的坐标加上计算点与直圆点或圆直点的坐标增量,即为计算点的坐标。
缓和曲线同理。
第二种曲线为两段直线中始端加一缓和曲线,末端加一缓和曲线,两段缓和曲线中加一圆曲线,如下第2点。
2.缓和曲线上计算点相对于HY或YH点的弦长和偏角δ=L²/6RL0X1=L-(L^5/40R²L0²)Y1=L³/6RL0D=√(X1²+Y1²)α=α(hy)+δα------------为计算点的方位角,此α为顺着线路方向计算时。



三角网闭合导线计算三角网闭合导线计算是测量、勘测等工程中的一项重要任务。
它的目的是通过三角测量法来测量地面上不同点之间的距离和方位角,从而建立起一个闭合的导线网。
本文将介绍三角网闭合导线计算的基本原理、方法和步骤,并举例说明。
一、三角网闭合导线计算的基本原理和方法三角网闭合导线计算的基本原理是利用三角形内角和等于180°的性质以及正弦定理、余弦定理等三角函数关系来计算点的坐标和距离。
根据测量需要,可以选择不同的三角测量法,如前方交会法、后方交会法、坐标变换法等。
在进行三角网闭合导线计算之前,首先要确定一个起始点和一组方位角。
起始点通常是已知的或者已测的一个点,而方位角可以通过观测已知点和目标点之间的方位角来确定。
选择合适的起始点和方位角对于计算的准确性和稳定性非常重要。
1.划分测区:根据实际测量范围和目的,将测区划分为若干小区域或三角网。
通常采用最小外包矩形法或者按照实际勘测需要进行划分。
2.建立坐标系统:在划分好的测区内,确定一个坐标原点和坐标轴方向,并建立起一个直角坐标系或者平面坐标系。
坐标系统的建立可以根据实际情况选择不同的方法,如平差法、最小二乘法等。
3.前后方交会测量:在各个小区域内,通过前后方交会测量方法来确定目标点的坐标。
前方交会是指利用自身仪器观测已知点和目标点之间的方位角和水平距离,然后通过正弦定理或余弦定理计算目标点的坐标;后方交会是指利用已知点和目标点观测的方位角和距离,然后通过正弦定理或余弦定理计算待测点的坐标。
4.调整导线:在所有小区域内的目标点坐标计算完成后,进行导线的调整。
导线调整是为了满足测量精度要求和网闭合条件。
常见的导线调整方法有最小二乘法、坐标变换法等。
5.网闭合检查:进行导线网的闭合检查,检查导线网的闭合差异是否满足精度要求。
如果闭合差异较大,则需要对目标点的坐标进行修正。
6.结果展示:将计算结果以图表、报告等形式进行展示,并说明计算结果的精度和可靠性。