S7-1200连接SINAMICS V90 实现位置闭环控制
- 格式:pdf
- 大小:5.31 MB
- 文档页数:19
实例| 1500PLC 连接V90 伺服系统实现位置闭环控制S7-1500 运动控制功能支持旋转轴、定位轴、同步轴和外部编码器等工艺对象。
并拥有轴控制面板以及全面的在线和诊断功能有助于轻松完成驱动装置的调试和优化工作。
S7-1500 支持多种连接方式。
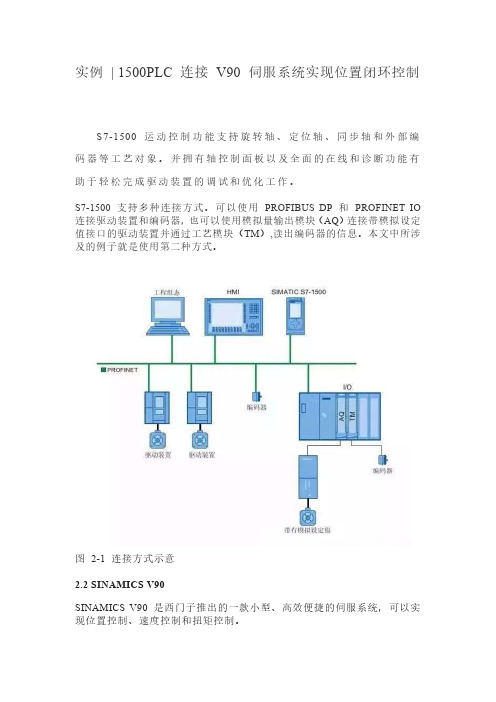
可以使用PROFIBUS DP 和PROFINET IO 连接驱动装置和编码器,也可以使用模拟量输出模块(AQ)连接带模拟设定值接口的驱动装置并通过工艺模块(TM),读出编码器的信息。
本文中所涉及的例子就是使用第二种方式。
图2-1 连接方式示意2.2 SINAMICS V90SINAMICS V90 是西门子推出的一款小型、高效便捷的伺服系统,可以实现位置控制、速度控制和扭矩控制。
使用V90 的速度控制功能可以与S7-1500 运动控制功能配合使用,接收S7-1500 模拟量模块发出的+-10V 模拟量信号做为速度给定,并通过PTO 功能反馈位置信号给S7-1500,在S7-1500PLC 中实现闭环位置控制。
3、应用项目配置示例3.1 S7-1500 组态3.1.1 组态硬件配置由于需要模拟量输出信号来控制速度给定,并接收来自V90 的脉冲反馈信号,所以S7-1500 系统中至少要配置 1 块模拟量输出模块和 1 块高速计数模块,考虑到V90 给出的位置反馈信号是5V 差分信号,S7-1500 系统中也要配置能够接收5V 差分信号的高速计数模块。
还需要 1 块数字量输出模块来为V90 提供使能信号。
图3-1 S7-1500 模块配置3.1.2 组态工艺对象驱动装置组态首先在工艺组态中添加一个定位轴,工艺对象一般的组态方法请参考《S7-1500运动控制使用入门》。
由于V90 接收的是+-10V 模拟量信号,所以模拟量输出模块也要设置输出范围为+-10V。
驱动装置类型选择“连接模拟量驱动装置”并在“输出”后面选择模拟量输出的变量名称。
为了在PLC 内激活使能时(如激活MC_Power 功能块Enable 管脚)能够把使能信号传递给V90,勾选激活启用输出,并且选择输出变量名称。
1收稿日期:2020-05-27作者简介:翟雳(1981—),男,江苏常州人,本科,高级讲师,研究方向:机电一体化。
随着自动化水平的不断提高,越来越多的工业控制场合需要精确的位置控制。
因此,如何更方便、更准确地实现位置控制是工业控制领域内的一个重要问题。
位置控制的精确性主要取决于伺服驱动器和运动控制器的精度。
1 SINAMICS V90伺服驱动简介西门子SINAMICS V90是2013年推出的小型、高效便捷的标准运动控制伺服驱动系统,配合使用SIMOTICS S-1FL6伺服电机。
SINAMICS V90伺服驱动支持九种控制模式,包括四种基本控制模式(外部脉冲位置控制模式、内部设定值位置控制模式、速度控制模式、转矩控制模式)和五种复合控制模式。
2 西门子S7-200 SMART实现对SINAMICS V90的位置控制方法2.1 主要设备西门子S7-200 SMART ST20型PLC,SINAMICS V90伺服驱动器,SIMOTICS S-1FL6伺服电机。
2.2 系统构成SINAMICS V90伺服驱动器与PLC连接起来,Q0.1与PTIA_24P相连,Q0.2与PTIB_24P相连,Q0.4与EMGS 相连,Q0.5与SON相连,Q0.6与RESET相连,SINAMICS V90伺服驱动器与SIMOTICS S-1FL6伺服电机连接。
2.3 控制程序的设计要求现对上述系统提出控制要求:伺服电动机驱动滚珠丝杆,滚珠丝杆螺距为6mm,机械减速比为1,脉冲当量为1um/p,伺服电机带增量编码器分辨率为10000。
当手自动转换开关SA1打到左边,执行手动模式。
手动模式下,按住按钮SB1,电机以100r/min正转,按住按钮SB2,电机以200r/min反转。
2.4 SINAMICS V90伺服驱动器参数设置P29003设置为0,P29014设置为1,P29010设置为0,P29011设置为0,P29012[0]设置为5,P29013设置为3,P2544设置为40,P2546设置为1000,P29301[0]设置为1,P29302[0]设置为2,P29300为6。
https:///cs/cn/zh/view/109742662Error! Use the Home tab to apply Blocktext to the text that you want to appear here.Error! Use the Home tab to apply Blocktext to the text that you want to appear here.目录1摘要 (3)2简介 (4)2.1S7-1200运动控制功能 (4)2.1.1S7-1200 V3.0 固件 (4)2.1.2S7-1200 V4.0 固件 (4)2.1.3S7-1200 V4.1 固件 (5)2.2SINAMICS V90 PN (5)2.3PROFINET 通信 (6)3应用项目配置示例 (7)3.1自动化任务概述 (7)3.2使用环境 (7)3.2.1硬件部分 (7)3.2.2软件部分 (8)3.3V-ASSISTANT 端90 PN 参数配置 (8)3.3.1配置报文 (8)3.3.2配置 IP 地址和设备名称(可选) (8)3.3.3配置斜坡函数发生 (9)3.4项目配置 (9)3.4.1新建项目并添加S7-1200 CPU (9)3.4.2添加 SINAMICS V90 PN 到项目 (11)3.4.3S7-1200 CPU 设备组态 (13)3.4.4SINAMICS V90 PN设备组态 (14)3.4.5连接SINAMICS V90 PN 和 S7-1200 CPU (14)3.5位置控制 (16)3.5.1插入工艺对象(TO) (16)3.5.2工艺对象配置–基本参数(常规) (16)3.5.3工艺对象配置–基本参数(驱动器) (17)3.5.4工艺对象配置–基本参数(编码器) (18)3.5.5工艺对象配置–扩展参数 (18)3.5.6组态应用循环时间 (19)3.5.7设备调试 (20)4文章声明 (24)C o p y r i g h t S i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d1 摘要本文主要介绍了如何使用CPU 1217C 通过PROFINET 连接SINAMICS V90伺服系统实现位置闭环控制。
S7-1200控制伺服V90 PN 工艺对象(看完秒懂)1.使用声明本文仅供参考,CPU版本、类型可能与用户实际使用不同,用户可能需要先对本文做修改和调整,才能将其用。
2.版本要求首先博图版本是V14 SP1,软件最好是V14 SP1之类的或更高版本。
3.实现功能通过基于PROFINET的PROFIdrive方式与V90 PN连接,工艺对象组态。
轴的点动,轴按指定速度运行,轴执行相对定位,轴执行绝对定位,轴停止,读写轴的参数。
4.组态4.1.1添加V90驱动首先在硬件目录下其他现场设备》PROFINET IO》SINAMICS》SINAMICS V90 PN V1.0;如下图:添加V90驱动4.1.2添加报文在设备视图对V90 PN选择报文,本文选择标准报文3,用户可以根据自己需要选择适合自己调试的报文,或自定义报文,如下图:添加报文4.1.3工艺组态本文选择定位轴,如下图:基本参数》常规基本参数》驱动器驱动器基本参数》编码器编码器5.程序编写5.1.1.MC_Power运动控制指令可启用或禁用轴。
MC_Power 指令必须在程序里一直调用,并保证MC_Power指令在其他Motion Control指令的前面调用。
StartMode: 0:速度控制; 1:位置控制。
StopMode= 0:紧急停止,按照轴工艺对象参数中的“急停”速度停止轴。
StopMode=1:立即停止,PLC立即停止发脉冲。
StopMode=2:带有加速度变化率控制的紧急停止:如果禁用轴的请求处于待决状态,则轴将以组态的急停减速度进行制动。
如果激活了加速度变化率控制,会将已组态的加速度变化率考虑在内。
轴在变为静止状态后被禁用。
MC_Power5.1.2.MC_Home运动控制指令使轴归位,设置参考点。
使用MC_Home运动控制指令可将轴坐标与实际物理驱动器位置匹配。
轴的绝对定位需要回原点。
可执行以下类型的回原点:● 绝对式直接归位(Mode = 0)新的轴位置为参数“Position”位置的值。
S7-1200CPU 1217C通过PROFINET 连接SINAMICS V90伺服系统实现位置闭环控制1摘要本文主要介绍了如何使用CPU 1217C通过PROFINET 连接SINAMICS V90伺服系统实现位置闭环控制。
其中对S7-1200 V4.0、V4.1固件版本的运动控制功能、工艺对象的组态和V90 PN的相关参数设置作了简要介绍。
2简介2.1S7-1200运动控制功能2.1.1S7-1200 V3.0 固件S7-1200 CPU固件版本从V3.0开始已经支持最多4路PTO输出,以CPU1214C (6ES7214-1AG31-0XB0)为例,其CPU本体支持4路PTO输出,其中PTO 1、PTO 2的频率范围为 2 Hz ≤ f ≤ 100 kHz,PTO 3 、PTO 4的频率范围为2 Hz ≤ f ≤ 20 kHz。
2.1.2S7-1200 V4.0 固件S7-1200 CPU V4.0固件版本虽然也只支持4路PTO输出,但是PTO的信号类型可以进行选择,支持的信号类型见表2-1 PTO 信号类型所示。
表2-1 PTO信号类型V4.0固件版本的CPU高速脉冲信号发生器输出地址可以自由分配给PTO,输出地址分配与输出频率范围见表2-2 脉冲信号发生器地址分配所示。
表2-2 脉冲信号发生器地址分配以CPU1214C CPU本体输出地址(6ES7214-1AG40-0XB0)为例,示例几种可能的PTO信号类型组合方式,见表2-3 脉冲方向组态所示:●示例1:4-100KHz PTO,不带方向输出。
●示例2:2-100KHz PTO 和 2-30KHz PTO,脉冲A+方向B输出。
●示例3:4-100KHz PTO,脉冲A+方向B输出,其中脉冲A100KHz,方向B 30KHz。
表2-3 脉冲方向组态2.1.3S7-1200 V4.1 固件S7-1200 CPU V4.1固件版本不仅支持通过PTO输出方式对伺服电机进行开环控制,而且支持通过PROFIdrive或者模拟量输出(AQ)方式对伺服电机进行闭环控制,见表2-4驱动器连接方式所示。
SINAMICS V90伺服转矩控制配置方法关键词:SINAMICS V90伺服转矩控制摘要:在单独使用转矩控制时,如果电机输出转矩大于负载转矩,那么电机将进入加速状态,可能会出现飞车现象。
SINAMICS V90 系统在转矩控制时提供了速度监视功能,能够在发生飞车故障时封锁脉冲,并输出故障状态。
本文将对SINAMICS V90 的转矩控制配置方法进行介绍。
1、概述SINAMICS V90提供了四种基本控制模式:PTI 外部脉冲位置控制模式IPos 内部设定值位置控制模式S 速度控制模式T 转矩控制模式在SINAMICS V90 的转矩控制模式(T)下,电机将以设定的转矩进行输出。
一般情况下,转矩控制的电机需要配合速度控制的电机使用,以实现对生产线张力等的控制。
在单独使用转矩控制时,如果电机输出转矩大于负载转矩,那么电机将进入加速状态,可能会出现飞车现象。
SINAMICS V90 系统在转矩控制时提供了速度监视功能,能够在发生飞车故障时封锁脉冲,并输出故障状态。
本文将对SINAMICS V90 的转矩控制配置方法进行介绍。
2、SINAMICS V90 转矩控制功能描述2.1 激活转矩控制通过设置参数P29003 = 3 激活转矩控制。
注意:重新上电后,SINAMICS V90 才能使转矩控制模式生效!2.2 转矩设定值源转矩设定值有两个来源可以使用,这两个源可以通过命令TSET 来选择:TSET = 0 (默认设置)使用AI2 设定转矩TSET = 1 使用参数P29043 设定转矩2.2.1 使用AI2 设定转矩在转矩模式下,在TSET 为低电平时,AI2 作为转矩设定值。
AI2 的电压值对应的转矩参考值为P29041[0]。
比如:P29041[0] = 100% 10V 对应额定转矩*100%P20041[0] = 50% 10V 对应额定转矩*50%2.2.2 使用参数P29043 设定转矩在转矩模式下,在TSET 为高电平时,参数P29043 作为转矩设定值。
基于西门子S7-200SMART的SINAMICSV90位置控制应用作者:***来源:《数字技术与应用》2020年第07期摘要:为了探究如何更方便、准确地实现位置控制,确保其位置控制的精度,本文探讨了基于西门子S7-200 SMART系列PLC和SINAMICS V90伺服系统的位置控制方法。
通过介绍系统软硬件构成及其特点,详细论述了PLC系统通过外部脉冲位置控制模式控制伺服电机,以实现相对运动的过程。
关键词:S7-200 SMART;SINAMICS V90;位置控制中图分类号:TP273 文献标识码:A 文章编号:1007-9416(2020)07-0001-02随着自动化水平的不断提高,越来越多的工业控制场合需要精确的位置控制。
因此,如何更方便、更准确地实现位置控制是工业控制领域内的一个重要问题。
位置控制的精确性主要取决于伺服驱动器和运动控制器的精度。
1 SINAMICS V90伺服驱动简介西门子SINAMICS V90是2013年推出的小型、高效便捷的標准运动控制伺服驱动系统,配合使用SIMOTICS S-1FL6伺服电机。
SINAMICS V90伺服驱动支持九种控制模式,包括四种基本控制模式(外部脉冲位置控制模式、内部设定值位置控制模式、速度控制模式、转矩控制模式)和五种复合控制模式。
2 西门子S7-200 SMART实现对SINAMICS V90的位置控制方法2.1 主要设备西门子S7-200 SMART ST20型PLC,SINAMICS V90伺服驱动器,SIMOTICS S-1FL6伺服电机。
2.2 系统构成SINAMICS V90伺服驱动器与PLC连接起来,Q0.1与PTIA_24P相连,Q0.2与PTIB_24P 相连,Q0.4与EMGS相连,Q0.5与SON相连,Q0.6与RESET相连,SINAMICS V90伺服驱动器与SIMOTICS S-1FL6伺服电机连接。
2.3 控制程序的设计要求现对上述系统提出控制要求:伺服电动机驱动滚珠丝杆,滚珠丝杆螺距为6mm,机械减速比为1,脉冲当量为1um/p,伺服电机带增量编码器分辨率为10000。
西门子S7-1200对V90伺服进行位置控制的三种方法(一)S7-1200系列PLC通过PROFINET与V90 PN伺服驱动器搭配进行位置控制,实现的方法主要有以下三种:· 方法一、在PLC中组态位置轴工艺对象,V90使用标准报文3,通过MC_Power、MC_MoveAbsolute等PLC Open标准程序块进行控制, 这种控制方式属于中央控制方式(位置控制在PLC中计算,驱动执行速度控制)。
· 方法二、在PLC中使用FB284(SINA_POS)功能块,V90使用西门子111报文,实现相对定位、绝对定位等位置控制,这种控制方式属于分布控制方式(位置控制在驱动器中计算)。
· 方法三、在PLC中使用FB38002(Easy_SINA_Pos)功能块,V90使用西门子111报文,此功能块是FB284功能块的简化版,功能比FB284少一些,但是使用更加简便。
V90 PN配置要点· 对于方法一:设置控制模式为'速度控制(S)',配置通信报文为标准报文3· 对于方法二或三:设置控制模式为'基本定位器控制(EPOS)',配置通信报文为西门子报文111· V90在线后点击'设置PROFINET->配置网络',设置V90的IP地址及设备名称:注意:设置的设备名称一定要与1200项目中配置的相同。
参数保存后需重启驱动器才能生效。
方法一使用标准报文3和工艺对象V90 PN与PLC采用PROFINET RT通信方式并使用报文3,项目步骤如下:1. 创建项目后,添加新设备S7-1200 PLC2. 在网络视图中添加V90 PN设备(使用GSD)2. 建立V90 PN与PLC的网络连接,并分别设置S7-1200及V90 PN的IP地址及设备名称:3. 在设备视图中为V90配置标准报文3'驱动器'选择'PROFIdrive' :配置轴的驱动,选择连接到PROFINET总线上的V90 PN:可以手动设置参考转速及最大转速,也可以选择'自动传送设备中的驱动装置参数'。