第二章 三相异步电动机的机械特性
- 格式:ppt
- 大小:1.07 MB
- 文档页数:40

§6-1 三相异步电动机的机械特性6.1.1三相异步电动机机械特性的三种表达式一.异步电动机机械特性的物理表达式1.异步电动机电磁转矩表达式:2.转矩常数表达式:3.转子电流表达式:4.转子电路功率因数表达式:可以看出:转差与电流、功率因数的关系及异步电动机机械特性(图6.1.1)图6.1.11.电流与转差关系(图6.1.1)I2' 最初与 s 成正比地增加,s 较大时,I2' 增加逐步减缓2.功率因数与转差关系(图6.1.1)s = 0,cosΦ'2 = 1随着 n 的逐步下降,s 增加,cos Φ'2 将逐步下降3.合成曲线J Φm ,即得 n = f(T) 的曲线,两条曲线相乘,并乘以常数 CT称为异步电动机的机械特性。
(图6.1.1)反映了不同转速时 T 与Φm 及转子电流的有功分量 I2' cosΦ'2 间的关系在物理上,这三个量的方向遵循左手定则二.异步电动机机械特性的参数表达式采用参数表达式可直接建立异步电动机工作时转矩和转速关系并进行定量分析由异步电动机的近似等效电路:1.异步电动机的机械特性参数表达式:2.异步电动机的机械特性图6.1.2 异步电动机的机械特性因为异步电动机机械特性为二次方程式,所以在某一转差率 sm 时,转矩有一最大值 Tm,该值称为异步电动机的最大转矩求出生产 Tm 时的转差 sm3.对应异步电动机的最大转矩Tm为正号对应于电动机状态,而负号则适用于发电机状态考虑 R1 << ( X1 + X2') ,可得:4.几点规律1)当电动机各参数及电源频率不变时,Tm 与 U 成正比,sm 因与 UX无关而保持不变2)当电源频率及电压不变时,sm 与 Tm 近似地与 ( X1+ X2')成反比3)Tm 与 R2' 之值无关,sm 与 R2'成正比5.电动机过载倍数 KT一般异步电动机的 K约等于 1.8 ~ 3.0T起重冶金机械用的电动机,KT 可达 3.5是电动机短时过载的极限过载倍数 KT6.起动转矩倍数 Kst异步电动机起动转矩 Tst ,即为 S = 1 时电机的电磁转矩三.机械特性的实用表达式考虑机械特性参数表达式及最大转矩 Tm 的表达式,机械特性可简化为忽略 R1 可以得到异步电动机机械特性的实用表达式这里当电动机在额定负载下运行时,转差率很小,忽略 s/sm,得:6.1.2三相异步电动机的固有机械特性和人为机械特性一.异步电动机的固有机械特性异步电动机在下述条件下工作:额定电压额定频率电动机按规定接线方法接线定子及转子电路中不外接电阻(电抗或电容)时的机械特性曲线 n = f ( T ) ,称之为固有机械特性其中:起动点额定工作点同步速点最大转矩点电动状态最大转矩点回馈制动最大转矩点A B HPP'可见:回馈制动时异步电动机过载能力大于电动状态时的过载能力二.人为机械特性由电动机的机械特性参数表达式可见:异步电动机电磁转矩T 的数值是由某一转速 n(或 s )下,电源电压 Ux、电源频率 f1、定子极对数 p、定子及转子电路的电阻 R1、R2'及电抗 X1、X2' 等参数决定人为特性,改变电源电压、电源频率、定子极对数、定子和转子电路的电阻及电抗等参数,可得到不同的人为机械特性。
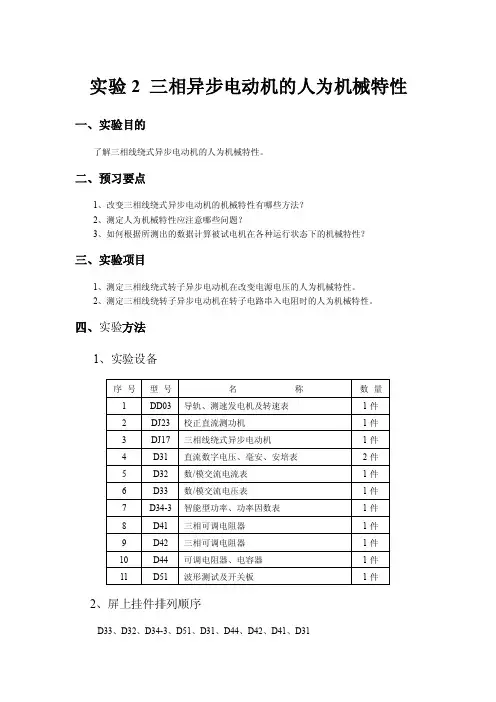
实验2 三相异步电动机的人为机械特性一、实验目的了解三相线绕式异步电动机的人为机械特性。
二、预习要点1、改变三相线绕式异步电动机的机械特性有哪些方法?2、测定人为机械特性应注意哪些问题?3、如何根据所测出的数据计算被试电机在各种运行状态下的机械特性?三、实验项目1、测定三相线绕式转子异步电动机在改变电源电压的人为机械特性。
2、测定三相线绕转子异步电动机在转子电路串入电阻时的人为机械特性。
四、实验方法1、实验设备2、屏上挂件排列顺序D33、D32、D34-3、D51、D31、D44、D42、D41、D31220V励磁电源励磁绕组图1 三相线绕转子异步电动机机械特性的接线图在图1中:(1) M用编号为DJ17的三相线绕式异步电动机,UN=220V,Y接法;(2) MG用编号为DJ23的校正直流测功机;(3) A1量程为3A;(4) 直流电表A2的量程为2000mA;(5) A3量程为200mA;(6) 交流电表V1的量程为500V;(7) V2的量程为1000V;(8) R1选用D44的180Ω阻值加上D42上四只900Ω串联再加两只900Ω并联共4230Ω阻值;(9) R2选用D44上1800Ω阻值;(10) RS选用D41上三组45Ω可调电阻(每组为90Ω与90Ω并联);(11) S1、S2、、S3选用D51挂箱上的对应开关,并将S1合向左边1端,S2合在左边短接端(即线绕式电机转子短路),S3合在2'位置(空载)。
3、改变电源电压的人为机械特性操作步骤:用万用表测定测功机MG的电枢电阻R a的电阻值为(Ω)(1) 按照图1接线。
确定S1合在左边1端,S2合在左边短接端,S3合在2'位置,M的定子绕组接成星形的情况下。
把R1、R2阻值置最大位置,将控制屏左侧三相调压器旋钮向逆时针方向旋到底,即把输出电压调到零。
(2) 检查控制屏下方“直流电机电源”的“励磁电源”开关及“电枢电源”开关都须在断开位置。

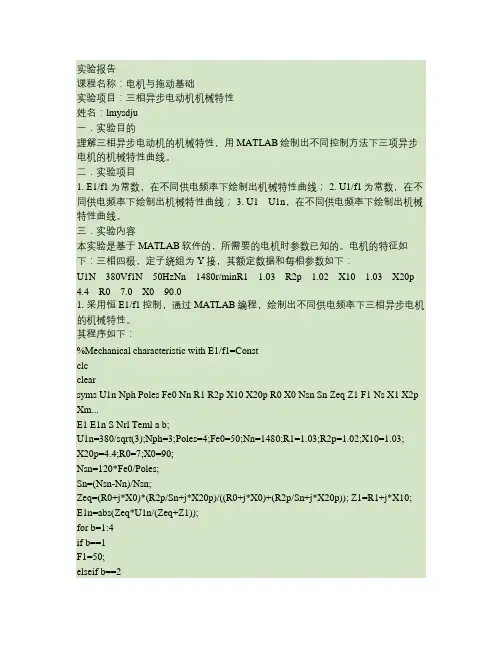
实验报告课程名称:电机与拖动基础实验项目:三相异步电动机机械特性姓名:lmysdju一.实验目的理解三相异步电动机的机械特性,用MATLAB绘制出不同控制方法下三项异步电机的机械特性曲线。
二.实验项目1. E1/f1为常数,在不同供电频率下绘制出机械特性曲线;2. U1/f1为常数,在不同供电频率下绘制出机械特性曲线;,在不同供电频率下绘制出机械特性曲线。
三.实验内容本实验是基于MATLAB软件的,所需要的电机时参数已知的。
电机的特征如下:三相四极,定子绕组为Y接,其额定数据和毎相参数如下:1. 采用恒E1/f1控制,通过MATLAB编程,绘制出不同供电频率下三相异步电机的机械特性。
其程序如下:%Mechanical characteristic with E1/f1=Constclcclearsyms U1n Nph Poles Fe0 Nn R1 R2p X10 X20p R0 X0 Nsn Sn Zeq Z1 F1 Ns X1 X2p Xm...E1 E1n S Nrl Teml a b;U1n=380/sqrt(3);Nph=3;Poles=4;Fe0=50;Nn=1480;R1=1.03;R2p=1.02;X10=1.03;X20p=4.4;R0=7;X0=90;Nsn=120*Fe0/Poles;Sn=(Nsn-Nn)/Nsn;Zeq=(R0+j*X0)*(R2p/Sn+j*X20p)/((R0+j*X0)+(R2p/Sn+j*X20p)); Z1=R1+j*X10; E1n=abs(Zeq*U1n/(Zeq+Z1));for b=1:4if b==1F1=50;elseif b==2F1=35;elseif b==3F1=25;elseif b==4F1=10;endNs=120*F1/Poles;X1=X10*(F1/Fe0);X2p=X20p*(F1/Fe0);Xm=X0*(F1/Fe0);E1=E1n*(F1/Fe0);for a=1:2000S=a/2000;Nrl=Ns*(1-S);Teml=Nph*Poles/(4*pi)*(E1/F1)^2*F1*R2p/S/((R2p/S)^2+X2p^2);Tem(a)=Teml;Nr(a)=Nrl;plot(Teml,Nrl);hold on;endhold on;endxlabel('Torque[N.m]');ylabel('Speed[r/min]');title('Mechanical characterristic with E1/f1=const');ylim([0,1600]);xlim([0,105]);text(50,1350,'f=50Hz');text(50,900,'f=35Hz');text(50,600,'f=25Hz');text(50,150,'f=10Hz');运行结果:Mechanical characterristic with E1/f1=constSpeed[r/min]Torque[N.m]2.采用恒U1/f1控制,重新绘制出不同供电频率下三相异步电机的机械特性曲线。

实验五 三相异步电动机在各种运行状态下的机械特性【思考要点】1. 如何利用现有设备测定三相绕线式异步电动机的机械。
2. 测定各种运行状态下的机械特性应注意哪些问题。
3. 如何根据所测得的数据计算被试电机在各种运行状态下的机械特性。
【实验原理】三相异步电动机的定、转子之间没有直接电的联系,它们之间的联系是通过电磁感应而实现的。
一台三相异步电动机的电磁转矩的大小决定了其拖动负载的能力,而三相异步电动机的电磁力矩的大小不仅与电动机本身的参数有关,也和其外加电源的电压有关。
本实验围绕异步电动机的电磁力矩和其参数、外加电压的关系以及各种运行状态等电力拖动问题进行展开。
1. 三相异步电动机的机械特性机械特性是指电动机转速n 与转矩T 之间的关系,一般用曲线表示。
欲求机械特性,先求T 与n 的数学关系式,称为机械特性表达式。
电磁转矩''21200em R m I P s T ==ΩΩ由异步电动机的近似等效电路,得()'22'2'2112X U I R R X X s =⎛⎫+++ ⎪⎝⎭ 代入T 的公式,即得参数表达式)()('212'21'221X X s R R sR U mT X+++Ω=考虑到0(1)n s n =-, 00260n πΩ=, 即可由此式绘出异步电动机的机械特性曲线()n f t =,如图6.24所示。
图6.24 三相异步电动机机械特性机械特性的参数表达式为二次方程,电磁转矩必有最大值,称为最大转矩T m 。
将表达式对s 求导,并令0dTds=,可求出产生最大转矩T m 时的转差率S m()'222'112m R S R X X =±++S m 称为临界转差率。
代入T 的公式则可得T m 的公式()2122'011122Xm U T R R X X =±Ω⎡⎤±+++⎢⎥⎣⎦式中正号对应于电动机状态,负号适用于发电机状态。

三相异步电动机的机械特性
1.三相异步电动机的电磁转矩
三相异步电动机的转矩:
三相异步电动机的转矩是由旋转磁场的每极磁通Φ与转子电流I2相互作用而生成的。
它与Φ和I2 的乘积成正比,此外,它还与转子电路的功率因素cosφ2 有关。
转矩表达式:
式中,K——与电动机结构参数、电源频率有关的一个常数;
U1,U ——定子绕组相电压,电源相电压;
R2——转子每相绕组的电阻;
X20——电动机不动(n=0)时转子每相绕组的感抗。
2.三相异步电动机的固有机械特性
固有机械特性:
异步电动机在额定电压和额定频率下,用规定的接线方式,定子和转子电路中的不串联任何电阻或电抗时的机械特性称为固有(自然)机械特性。
电动机的抱负空载转速:
额定转矩及额定转差率:S=(N1-N2)/N1
转矩-转差率特性的有用表达式,即规格化转矩-转差率特性。
3.三相异步电动机的人为机械特性
人为机械特性:
异步电动机的机械特性与电动机的参数有关,也与外加电源电压、电源频率有关,将关系式中的参数人为地加以转变而获得的特性称为异步电动机的人为机械特性。
电压U的变化对抱负空载转速no和临界转差率Sm不发生影响,但最大转矩Tmax与U2成正比,当降低定子电压时,no和Sm不变,而Tmax大大减小。
在同一转差率状况下,人为特性与固有特性的转矩之比等于电压的平方之比。
因此在绘制降低电压的人为特性时,是以固有特性为基础,在不同的S处,取固有特性上对应的转矩乘降低电压与额定电压比值的平方,即可作出人为特性曲线:
在电动机定子电路中外串电阻或电抗后,电动机端电压为电源电压减去定子外串电阻上或电抗上的压降,致使定子绕组相电压降低。
三相异步电动机的运行特性摘要:本章介绍了三相异步电动机的机械特性的三个表达式。
固有机械特性和人为机械特性,阐述了三相异步电动机的起动、调速和制动的各种方法、特点和应用5.1三相异步电动机的运行特性三相异步电动机的运行特性就是三相异步电动机的运行工作时的机械特性。
和直流电动机一样,三相异步电动机的机械特性也是指电磁转矩与转子转速之间的关系。
由于转子转速与同步转速、转差率存在下列关系,即(5.1)则三相异步电动机的机械特性用曲线表示时,习惯上纵坐标同时表示转速和转差率,横坐标表示电磁转矩。
三相异步电动机的机械特性有三种表达式,现介绍如下:5.1.1机械特性的物理表达式由上一章三相异步电动机的转矩关系知,三相异步电动机转矩的一般表达式为(5.2)式中为三相异步电动机的转矩系数,是一常数;为三相异步电动机的气隙每极磁通量;为转子电流的折算值;为转子电路的功率因数;式(5.2)表明了电磁转矩与磁通量和转子电流的有功分量的乘积成正比,它是电磁力定律在三相异步电动机的应用,它从物理特性上描述了三相异步电动机的运行特性,因此这一表达式又称为三相异步电动机的物理表达式。
仅从式(5.2)不能明显地看出电磁转矩与转差率之间的变化规律。
要从分析气隙每极磁通量,转子相电流,以及为转子功率因数与转差率之间的关系,间接地找出其变化规律。
现分析如表5.1所示。
根据表5.1中的分析,可作出曲线、和分别如图5.2、5.3、5.4所示,据此可得出图5.1所示的机械特性曲线。
曲线分为两段:当较小时(),变化不大,,电磁转矩与转子相电流成正比关系,表现为AB段近似为直线,称为直线部分;当较大时(),如,减少近一半,很小,尽管转子相电流增大,有功电流不大,使电磁转矩反而减小了,此时表现为段,段为曲线段,称为曲线部分。
由此分析知,三相异步电动机的机械特性在某转差率下,产生最大转矩,即点称为最大转矩点,相应的转矩为称为最大转矩,对应的转差率称为临界转差率。