哈工大机械设计第三章PPT课件
- 格式:ppt
- 大小:12.66 MB
- 文档页数:10
机械设计制造及其自动化专业课程介绍默认分类 2010-04-24 11:35:19 阅读61 评论0 字号:大中小订阅作者:船舶学院时间:2009-6-16 14:40:51“机电系统计算机控制”教学大纲(PUTER CONTROL OF ELECTRICAL MACHINE SYSTEMS)大纲编制:李哲教研室主任:李哲课程编码:课程名称:机电系统计算机控制教学性质:选修课适用专业:机械及近机类专业学时:30(26/4)学分:1.5一、课程的性质、目的与任务本课程是适应机电一体化的发展趋势而设立的,是机械设计制造及自动化专业的一门主干课程,主要讲述直流电机、交流电机控制系统,液压伺服控制系统和气压传动控制系统,通过这门课让学生掌握机电液气系统的设计和应用。
二、课程的基本要求本课程主要讲授内容有直流、交流电机的组成、原理、动态特性及其应用,液压伺服系统设计与气压传动系统设计;要求学生掌握机电液气系统的组成、分类,分析和设计;了解各自的特点和应用场合;具备分析机电液气系统和设计简单的机电液气系统的能力,为进一步学习深造和适应未来的工作奠定基础。
三、本课程与相关课程的联系与分工相关课程有:电工学、模拟电路、自动控制原理、液压传动;电工学、模拟电路、自动控制原理等课程作为本课程的基础课。
液压传动课程侧重于讲述液压传动系统,本课程侧重于液压控制系统。
四、教学大纲内容使用教材与参考教材1、使用教材:(骆涵秀主编机电控制 XX大学 2000年1月)2、参考教材:(李洪人液压控制系统国防工业)(邓星钟机电传动控制机械工业)(朱善君可编程控制器系统原理应用维护清华大学)五、教学大纲内容及学时分配第一章概述(2)本章主要内容有:分别用实例引出机电、液压、气动控制系统的整体组成,功能和特点;要求学生掌握机电液气系统的组成;了解机电液气系统的发展方向和选用原则。
第二章直流电机(4)本章主要内容有:直流电机的原理,动态特性分析和系统应用;要求学生掌握直流电机的机械特性和系统应用;了解直流电机的原理、组成。

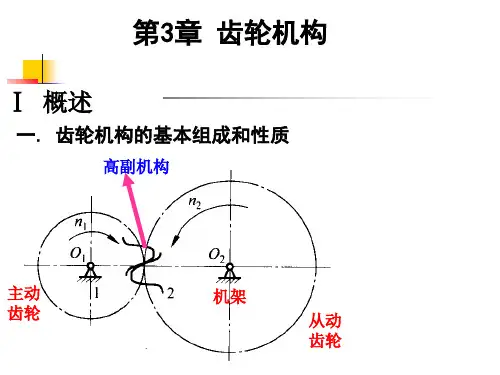
第3章凸轮机构及其设计3.1基本要求1.了解凸轮机构的类型及其特点。
2.掌握从动件的几种常用运动规律及特点。
掌握从动件行程、从动件推程、推程运动角、从动件回程、回程运动角、从动件远(近)休程及远(近)休止角及凸轮的基圆、偏距等基本概念。
3.熟练掌握并灵活运用反转法原理,应用这一原理设计直动从动件盘形凸轮机构、摆动从动件盘形凸轮机构及平底直动从动件盘形凸轮机构。
4.掌握凸轮机构基本尺寸的确定原则,根据这些原则确定凸轮机构的的压力角及其许用值、基圆半径、偏距、滚子半径等基本尺寸。
5.掌握凸轮机构设计的基本步骤,学会用计算机对凸轮机构进行辅助设计的方法。
3.2内容提要一、本章重点本章重点是从动件运动规律的选择及其特点,按预定从动件运动规律设计平面凸轮轮廓曲线和凸轮机构基本尺寸的确定。
涉及到根据使用场合和工作要求选择凸轮机构的型式、选择或设计从动件的运动规律、合理选择或确定凸轮的基圆半径、正确设计出凸轮廓线、对设计出来的凸轮机构进行分析以校核其是否满足设计要求。
1 凸轮机构的类型选择选择凸轮机构的类型是凸轮机构设计的第一步,称为凸轮机构的型综合。
凸轮的形状有平面凸轮(盘形凸轮、移动凸轮)和空间凸轮,从动件的形状有尖顶从动件、滚子从动件、平底从动件,而从动件的运动形式有移动和摆动之分,凸轮与从动件维持高副接触的方法又有分为力锁合、形锁合。
故凸轮机构的类型多种多样,设计凸轮机构时,可根据使用场合和工作要求的不同加以选择。
(1)各类凸轮机构的特点及适用场合尖顶从动件凸轮机构:优点是结构最简单,缺点是尖顶处极易磨损,故只适用于作用力不大和速度较低的场合。
滚子从动件凸轮机构:优点是滚子与凸轮廓线间为滚动摩擦,摩擦较小,可用来传递较大的动力,故应用广泛。
平底从动件凸轮机构:优点是平底与凸轮廓线接触处极易形成油膜、能减少磨损,且不计摩擦时,凸轮对从动件的作用力始终垂直于平底,受力平稳、传动效率较高,故适用于高速场合。


此文档仅供收集于网络,如有侵权请联系网站删除Harbin Institute of Technology机械原理大作业二课程名称:机械原理设计题目:凸轮结构设计院系:机电工程学院班级:设计者:学号:指导教师:设计时间:哈尔滨工业大学1、设计题目序号 升程(mm ) 升程运动角(︒) 升程运动规律 升程许用压力角(︒) 回程运动角(︒) 回程运动规律 回程许用压力角(︒) 远休止角(︒) 近休止角(︒) 350150正弦加速度40100余弦加速度6030802、凸轮机构推杆升程、回程运动方程,推杆位移、速度、加速度线图。
(1)推杆各行程运动方程(设定角速度为s s rad /2/1πω==)①从动件推程运动方程(650πϕ≤≤)⎥⎦⎤⎢⎣⎡⎪⎪⎭⎫ ⎝⎛-=ϕφππφϕ002sin 21h s ⎥⎦⎤⎢⎣⎡⎪⎪⎭⎫ ⎝⎛-=ϕφπφω0012cos 1h v ; ⎪⎪⎭⎫⎝⎛=ϕφπφωπ020212sin 2h a代入数据,可得:⎪⎭⎫ ⎝⎛-=ϕππϕ4.2sin 215650s mm()ϕ4.2cos -1120=v s mm /ϕπ4.2sin 576=a 2/s mm②从动件远休程运动方程(πϕπ≤≤65) 0;50===a v mm s③从动件回程运动方程(914πϕπ≤≤) ()[]⎭⎬⎫⎩⎨⎧+-+=s h s φφϕφπ0'0cos 12()[]s h v φφϕφπφωπ+--=0'0'01sin 2 ()[]s h a φφϕφπφωπ+--=0'0'212cos 22代入数据,可得:()[]πϕ8.18.1cos 125-+=s mm ()πϕπ8.18.1sin 90--=v s mm / ()πϕπ8.18.1cos 3242--=a 2/s mm④从动件进休程运动方程(πϕπ2914≤≤) 0===a v s(2)、推杆位移、速度、加速度线图①推杆的位移线图如下②推杆的速度线图如下③推杆的加速度线图如下3、凸轮机构的ds s-线图,并依次确定凸轮的基圆半径和偏dϕ距凸轮机构的s d ds-ϕ线图如下图所示由图中范围选定点(-10,-50)为凸轮转轴O 点,则mm r 99.501050220=+=取基圆半径为r 0 =51mm ,偏距e = 10mm 。