哈尔滨工业大学机械原理3课件
- 格式:ppt
- 大小:2.06 MB
- 文档页数:76

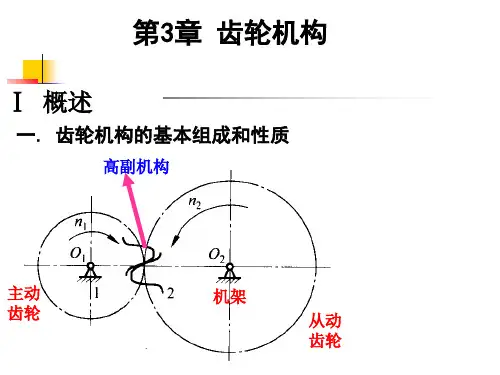
Harbin Institute of Technology机械原理大作业三课程名称:设计题目:院系:班级:设计者:学号:指导教师:设计时间:哈尔滨工业大学大作业3 齿轮传动设计 1、设计题目1.1机构运动简图1.2机械传动系统原始参数2、传动比的分配计算由已知条件,电动机转速n=1450r/min ,输出转速n 1=27 r/min ,n 2=31 r/min ,n 3=37 r/min ,带传动最大传动比max p i =2.5,滑移齿轮传动最大传动比=4,定轴齿轮传动最大 传动比=4。
可求得:传动系统的总传动比为:11n ni == 1450/27=53.70322n ni == 1450/31=46.774 33n ni == 1450/37=39.189 传动系统的总传动比分别由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。
设带传的传送比为其最大传送比5.2max =p i ,滑移齿轮的传动比为321,,v v v i i i ,定轴齿轮传动的传动比为f i ,则总传动比由于1i > 2i > 3i ,故取1max 4v v i i ==则定轴齿轮传动部分的传动比为1max max5.37f p v i i i i ==滑移齿轮传动的传动比22max3.49v f p i i i i ==33m a x2.92v f p i i i i ==定轴齿轮传动由3对齿轮传动组成, 每对齿轮的传动比为:1.754d i ==≤3、齿轮齿数的确定滑移齿轮齿数3=v i 65622.9521z z == 2=v i 8766 3.4719z z ==1=v i 10967 3.9417z z ==齿轮7,齿轮8:719z = 866z =781()852a m z z =+=齿轮9,齿轮10:917z =1067z =此时已知条件为'a =85mm ,910211()842()ni i a m z z X X ==+=-∑mm ''arccos(cos )21.78a aαα==总变位系数:'910()0.552tan z z x inv inv ααα∑+=-=根据x ∑值和1093.94 3.0z uz ==>,按选择变位系数线图左部斜线⑤分配变位系数,得90.45x =齿轮5,齿轮6:5=21z662z =此时已知'a =85mm ,561()832a m z z =+= ''arccos(cos )23.42a a αα==100.10x =总变位系数:'65() 1.082tan z z x inv inv ααα∑+=-=根据x ∑值和652.953z u z ==>,按选择变位系数线图左部斜线④分配变位系数,得 50.5x =60.58x =定轴圆柱齿轮齿数=d i 1214111326 1.5317z z z z ===齿轮11,齿轮12:角度变位正传动。



此文档仅供收集于网络,如有侵权请联系网站删除Harbin Institute of Technology机械原理大作业二课程名称:机械原理设计题目:凸轮结构设计院系:机电工程学院班级:设计者:学号:指导教师:设计时间:哈尔滨工业大学1、设计题目序号 升程(mm ) 升程运动角(︒) 升程运动规律 升程许用压力角(︒) 回程运动角(︒) 回程运动规律 回程许用压力角(︒) 远休止角(︒) 近休止角(︒) 350150正弦加速度40100余弦加速度6030802、凸轮机构推杆升程、回程运动方程,推杆位移、速度、加速度线图。
(1)推杆各行程运动方程(设定角速度为s s rad /2/1πω==)①从动件推程运动方程(650πϕ≤≤)⎥⎦⎤⎢⎣⎡⎪⎪⎭⎫ ⎝⎛-=ϕφππφϕ002sin 21h s ⎥⎦⎤⎢⎣⎡⎪⎪⎭⎫ ⎝⎛-=ϕφπφω0012cos 1h v ; ⎪⎪⎭⎫⎝⎛=ϕφπφωπ020212sin 2h a代入数据,可得:⎪⎭⎫ ⎝⎛-=ϕππϕ4.2sin 215650s mm()ϕ4.2cos -1120=v s mm /ϕπ4.2sin 576=a 2/s mm②从动件远休程运动方程(πϕπ≤≤65) 0;50===a v mm s③从动件回程运动方程(914πϕπ≤≤) ()[]⎭⎬⎫⎩⎨⎧+-+=s h s φφϕφπ0'0cos 12()[]s h v φφϕφπφωπ+--=0'0'01sin 2 ()[]s h a φφϕφπφωπ+--=0'0'212cos 22代入数据,可得:()[]πϕ8.18.1cos 125-+=s mm ()πϕπ8.18.1sin 90--=v s mm / ()πϕπ8.18.1cos 3242--=a 2/s mm④从动件进休程运动方程(πϕπ2914≤≤) 0===a v s(2)、推杆位移、速度、加速度线图①推杆的位移线图如下②推杆的速度线图如下③推杆的加速度线图如下3、凸轮机构的ds s-线图,并依次确定凸轮的基圆半径和偏dϕ距凸轮机构的s d ds-ϕ线图如下图所示由图中范围选定点(-10,-50)为凸轮转轴O 点,则mm r 99.501050220=+=取基圆半径为r 0 =51mm ,偏距e = 10mm 。