自动控制理论基础左为恒周林主编机械工业出版社习题解
- 格式:pdf
- 大小:12.62 MB
- 文档页数:146
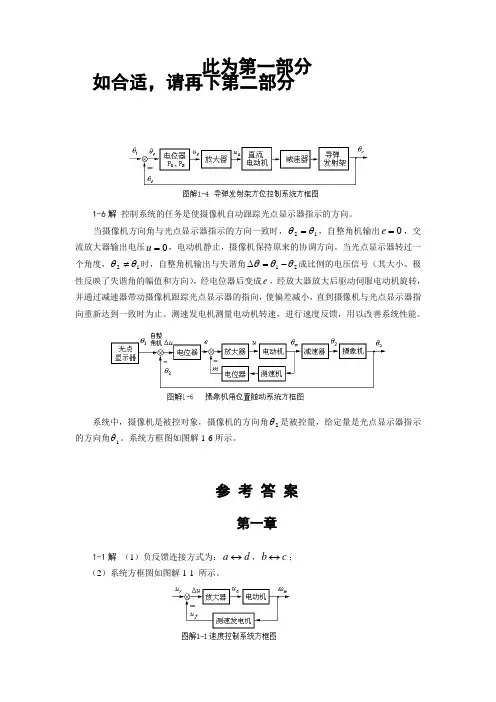
此为第一部分如合适,请再下第二部分1-6解 控制系统的任务是使摄像机自动跟踪光点显示器指示的方向。
当摄像机方向角与光点显示器指示的方向一致时,12θθ=,自整角机输出0=e ,交流放大器输出电压0=u ,电动机静止,摄像机保持原来的协调方向。
当光点显示器转过一个角度,12θθ≠时,自整角机输出与失谐角21θθθ-=∆成比例的电压信号(其大小、极性反映了失谐角的幅值和方向),经电位器后变成e ,经放大器放大后驱动伺服电动机旋转,并通过减速器带动摄像机跟踪光点显示器的指向,使偏差减小,直到摄像机与光点显示器指向重新达到一致时为止。
测速发电机测量电动机转速,进行速度反馈,用以改善系统性能。
系统中,摄像机是被控对象,摄像机的方向角2θ是被控量,给定量是光点显示器指示的方向角1θ。
系统方框图如图解1-6所示。
参 考 答 案第一章1-1解 (1)负反馈连接方式为:d a ↔,c b ↔; (2)系统方框图如图解1-1 所示。
1-3解 加热炉采用电加热方式运行,加热器所产生的热量与调压器电压c u 的平方成正比,c u 增高,炉温就上升,c u 的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动机驱动。
炉子的实际温度用热电偶测量,输出电压f u 。
f u 作为系统的反馈电压与给定电压r u 进行比较,得出偏差电压e u ,经电压放大器、功率放大器放大成a u 后,作为控制电动机的电枢电压。
在正常情况下,炉温等于某个期望值T °C ,热电偶的输出电压f u 正好等于给定电压r u 。
此时,0=-=f r e u u u ,故01==a u u ,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使c u 保持一定的数值。
这时,炉子散失的热量正好等于从加热器吸取的热量,形成稳定的热平衡状态,温度保持恒定。
当炉膛温度T °C 由于某种原因突然下降(例如炉门打开造成的热量流失),则出现以下的控制过程:控制的结果是使炉膛温度回升,直至T °C 的实际值等于期望值为止。
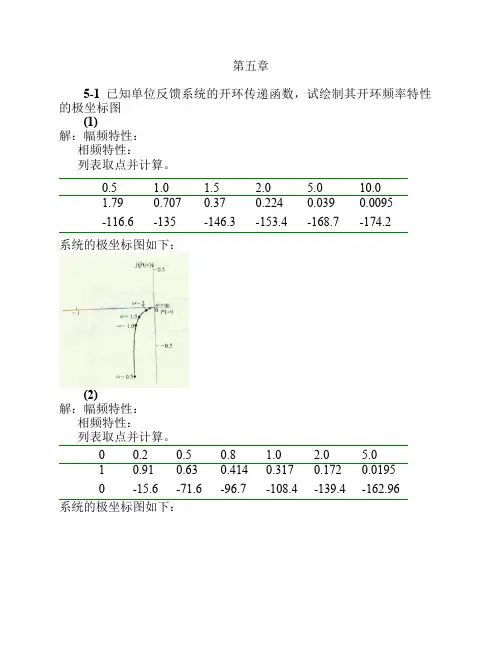
第五章5-1 已知单位反馈系统的开环传递函数,试绘制其开环频率特性的极坐标图(1)解:幅频特性:相频特性:列表取点并计算。
0.5 1.0 1.5 2.0 5.010.01.790.7070.370.2240.0390.0095-116.6-135-146.3-153.4-168.7-174.2系统的极坐标图如下:(2)解:幅频特性:相频特性:列表取点并计算。
00.20.50.8 1.0 2.0 5.010.910.630.4140.3170.1720.01950-15.6-71.6-96.7-108.4-139.4-162.96系统的极坐标图如下:(3)解:幅频特性:相频特性:列表取点并计算。
0.20.30.51254.55 2.74 1.270.3170.0540.0039-105.6-137.6-161-198.4-229.4-253系统的极坐标图如下:(4)解:幅频特性:相频特性:列表取点并计算。
0.20.250.30.50.60.8122.7513.87.86 2.520.530.650.317-195.6-220.6-227.6-251.6-261.6-276.7-288.4系统的极坐标图如下:5-2 试绘制上题中各系统的开环对数频率特性(伯德图)。
(1)解:系统为Ⅰ型,伯德图起始斜率为-20dB/dec,在处与=20=0相交。
环节的交接频率,斜率下降20dB/dec,变为-40dB/de c。
系统的伯德图如图所示:(2)解:伯德图起始为0dB线,的交接频率,斜率下降20dB/dec,变为-20dB/de c。
的交接频率,斜率下降20dB/dec,变为-40dB/de c。
系统的伯德图如图所示。
(3)解:系统为Ⅰ型,伯德图起始斜率为-20dB/dec,其延长线在=1处与=20=0相交。
的交接频率,斜率下降20dB/dec,变为-40dB/de c。
的交接频率,斜率下降20dB/dec,变为-60dB/de c。
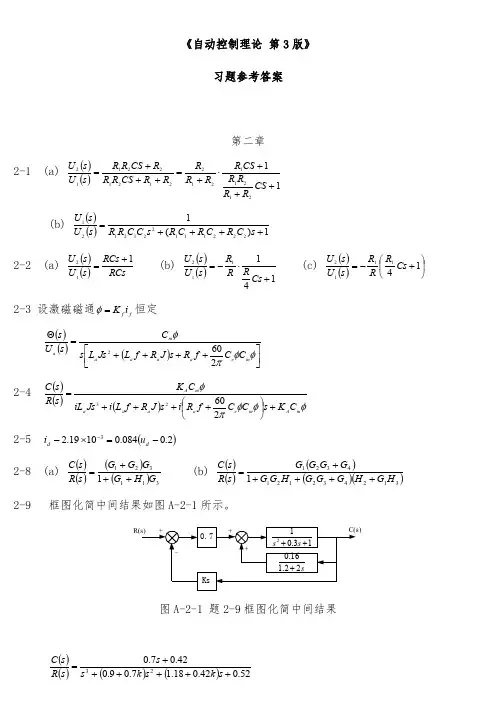
《自动控制理论 第2版》习题参考答案第二章2-1 (a)()()1121211212212122112+++⋅+=+++=CS R R R R CS R R R R R R CS R R R CS R R s U s U (b)()()1)(12221112212121++++=s C R C R C R s C C R R s U s U 2-2 (a)()()RCs RCs s U s U 112+= (b) ()()141112+⋅-=Cs R R R s U s U (c) ()()⎪⎭⎫⎝⎛+-=141112Cs R R R s U s U 2-3 设激磁磁通f f i K =φ恒定()()()⎥⎦⎤⎢⎣⎡++++=Θφφπφm e a a a a m a C C f R s J R f L Js L s C s U s 2602 2-4()()()φφφπφm A m e a a a a m A C K s C C f R i s J R f L i Js iL C K s R s C +⎪⎭⎫⎝⎛++++=260232-5 ()2.0084.01019.23-=⨯--d d u i2-8 (a)()()()()3113211G H G G G G s R s C +++= (b) ()()()()()31243212143211H G H G G G H G G G G G G s R s C +++++=2-9 框图化简中间结果如图A-2-1所示。
图A-2-1 题2-9框图化简中间结果()()()()52.042.018.17.09.042.07.023++++++=s k s k s s s R s C 2-10()()4232121123211G H G G H G G H G G G G s R s C ++-+=2-11 系统信号流程图如图A-2-2所示。
图A-2-2 题2-11系统信号流程图()()()()2154214212654212215421421321111H H G G G G G G G H G G G G G s R s C H H G G G G G G G G G G s R s C -++=-++=2-12 (a)()()()adgi abcdi agdef abcdef cdhs R s C +++-=11(b) ()()()1221211222112++++=s C R C R C R s C R C R R s R s C2-13 由选加原理,可得()()()()()()[]s D H G G s D G s D G s R G G G H G H s C 3121221221221111--+++=第三章3-1 分三种情况讨论 (a) 当1>ζ时()()()()()⎥⎥⎦⎤⎢⎢⎣⎡-+----+-=-+-=---=⎪⎭⎫ ⎝⎛-+-⎪⎭⎫ ⎝⎛---221221222211112121,122ζζζζωζωζωζζωζζωζζωζζt t n n nn n n e e t t c s s (b) 当10<<ζ时()()()⎪⎪⎭⎫⎝⎛-----+-=---+---=-+-=---=---22222222222121121sin 1121sin 1211cos 221,1ζζζωζωζωζωζωζζωζωζωζωζζωζζζωζωζωarctg t et t e t et t c j s j s n tnnn t nn tnnn n n n n(c) 当1=ζ时设系统为单位反馈系统,有()()()()()2222nn n r s s s s R s c s R s E ωζωζω+++=-= 系统对单位斜坡输入的稳态误差为 ()nn n n s sr s s s s s s im e ωζωζωζω22212220=+++⋅⋅=→ 3-2 (1) 0,0,50===a v p K K K (2) 0,,==∞=a v p K K K K(3) 10,,K K K K a v p =∞=∞= (4) 0,200,==∞=a v p K KK K 3-3 首先求系统的给定误差传递函数()101.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()()()0)101.0()12.0(20)101.0(2lim lim 1.0)101.0()12.0(10lim lim 0101.0)11.0(lim lim 322202202220012000=+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s e s s e s(1) 0)(R t r =,此时有0)()(,)(0===t r t r R t r s s s ,于是稳态误差级数为()0)(0==t r C t e s sr ,0≥t(2) t R R t r 10)(+=,此时有0)(,)(,)(110==+=t r R t r t R R t r s s s ,于是稳态误差级数为()1101.0)()(R t rC t r C t e s s sr =+= ,0≥t (3) 221021)(t R t R R t r ++=,此时有t R R t rt R t R R t r s s 212210)(,21)(+=++= ,2)(R t r s = ,于是稳态误差级数为 ())(1.0)(!2)()(21210t R R t r C t rC t r C t e s s s sr +=++= ,0≥t 3-4 首先求系统的给定误差传递函数()5001.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()⎪⎭⎫⎝⎛++-=-=-t e t t c s n t n nn n 21222,1ωωωωω()()()232220220222001200050098)5001.0()12.0(1000)5001.0(100lim lim 5001)5001.0()12.0(500lim lim 05001.0)11.0(lim lim =+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s es s e stt r t t rt t r s s s 5sin 25)(5cos 5)(5sin )(-===稳态误差级数为()[][][]tt tC t C C t e sr 5cos 1015sin 109.45cos 55sin 25224120 -⨯++⨯=-⨯+⎥⎦⎤⎢⎣⎡+⨯-=- 3-5 按技术条件(1)~(4)确定的二阶系统极点在s 平面上的区域如图A-3-1 (a) ~ (d)的阴影区域。

习题31. 答案:t K >=0.32. 此温度计的时间常数T= t/4=15秒3. 答案: ()10.11s s φ=+4. 答案:b 变大系统阶跃响应的延迟时间、上升时间和调节时间都加长。
5.)1)(2(22++-=s s s X Y 6. 略7. 答案: (1)2600()70600G s s s =++,(2)24.5n w =,ζ=1.438. 答案: 1.24p t =,%9.5%σ= 1.58(5%)s t =∆=或 2.11(2%)s t =∆=9. 1)开环零点-2.5 开环极点-0.52)闭环零点-2.5 闭环极点-0.4500 ± 0.8930i 3)1=n ω ζ=0.45 4)38.1=r t 96.7=s t %6.22%=ο10. 答案:H K =0.9,0K =10 11. 答案:47,0.1K τ≈≈ 12. 答案:3 13. 答案:(1)不稳定,右半S 平面有2个根; (2)不稳定,右半S 平面有2个根; (3)不稳定,右半S 平面有1个根;14. 略15. 答案:系统的参数(),K ξ的稳定域为0020K ξξ><<,。
16. 答案:51499K << 17. 答案:(1)由()D s 表达式可见,当0β=时系统结构不稳定;当0β>时系统总是稳定的。
(2)由ξ=可见2%3.57s n t K ξσβξωβ⎧↑→↓⎪↑⇒⎨==↓⎪⎩(3) 1ss ss a a e e K K ββ==∴↑→↑。
18. 答案:a T 、M T 与K 均大于0且10zK T <<时闭环系统是稳定的。
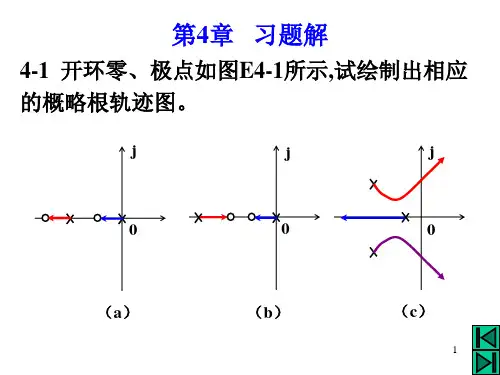
19. 答案:121ssn K e K =-+20. 证明:是I 型系统;21.B K K v =KBe ss = 与K 成反比,与B 成正比 22.G=tf(80,[1 2 0]); GB=feedback(G,1); t=0:0.01:1; [y,t]=step(GB); e=1-y;m=length(t);subplot(2,1,1),plot(t,y,'k',t,ones(m,1),'k-.') %draw unit step response curve title('unit step response','FontSize',8)xlabel('Time(sec.)','Position',[5.5 -0.21],'FontSize',8) ylabel('Amplitude','FontSize',8) axis([0 6 0 2])subplot(2,1,2), plot(t,e,'k',t,zeros(m,1),'k-.') %draw error response curve title('error response','FontSize',8)xlabel('Time(sec.)','Position',[5.5 -1.21],'FontSize',8) ylabel('Amplitude','FontSize',8)012unit step responseTime(sec.)A m p l i t u d e-11error responseTime(sec.)A m p l i t u d e()()1()k B k G s s G s φ=+()()1()B k B s G s s φφ=-2()()Ks bG s s a k s+=+-0lim ()V s bK sG s a K →==-1ss v a k e K b-==23 clearnum=1;den=conv([0.5 1 0],[4 1]); rangek=[0.2,0.8,1.2]; t=linspace(1,60,300)'; for j=1:3s1=tf(num*rangek(j),den); sys=feedback(s1,1); y(:,j)=step(sys,t); endplot(t,y(:,1),'k',t,y(:,2),'r',t,y(:,3),'b')title('unit step response under different k','FontSize',8) xlabel('Time(sec.)','Position',[50 -1.8],'FontSize',8) ylabel('Amplitude','FontSize',8) axis([0 60 -1.5 3.5])gtext('k=0.2'),gtext('k=0.8'),gtext('k=1.2')Time(sec.)A m p l i t u d e求当k =0.8时系统的性能指标 clear num=1;den=conv([0.5 1 0],[4 1]); k=0.8;num=num*k; s1=tf(num,den); sys=feedback(s1,1); t=0:0.005:50; y=step(sys,t); r=1;while y(r)<1.0001 r=r+1; endrise_time=(r-1)*0.005 [ymax,tp]=max(y);peak_time=(tp-1)*0.005 max_overshoot=ymax-1 s=length(t);while y(s)>0.98 & y(s)<1.02s=s-1;endsettling_time=(s+1)*0.005运行结果:rise_time =4.5350peak_time =7.7950max_overshoot =0.5710settling_time =46.855024 num=[6.3223 18 12.811]den=[1 6 11.3223 18 12.811]step(num,den)25 num=1for kesi=0:0.2:1sys=tf(num,[1 2*kesi 1]);step(sys)hold onend习题41.(a) (b) (c)(d) (e) (f) 2.(1)(2)证明:s j σω=+代入1+G(s)H(s)=0*()()0s s b k s a +++=*()(())(())0jw jw b k jw a σσσ++++++=*2()()0k a b σσσω+++-=*20k b a ++=消去*k 得:222()a a ab σω++=-所以根轨迹是以(-a,0) 3.答案:(1)(2)(3)(4)4.答案:(1)分离点: 3.854d =-渐近线 25,a a πσϕ=-=±,* 1.37K =,闭环系统稳定的*K 值的范围是*04K <<。
第一章自动控制概论思考题1、什么是自动控制?他对人类活动有什么意义?所谓自动控制就是在没有人直接参与的情况下,通过控制装置使被控制对彖或生产过程自动地按照预定的规律运行,使Z达到预期的状态或性能要求。
自动控制是人类在认识世界和发明创新的过程屮发展起來的一门重要的科学技术。
依靠它,人类可以从笨重、重复性的劳动中解放出來,从事更富创造性的工作。
2、什么是反馈?什么是负反馈?通常,我们把输出量送回到输入端并与输入信号比较的过程称为反馈。
若反馈的信号是与输入信号相减而使偏差值越来越小,则称为负反馈。
3、开环控制系统是怎样实现控制作用的?请举例说明。
开环控制系统:如果系统的输出端和输入端Z间不存在反馈回路,输出量对系统的控制作用没有影响,这样的系统称为开环控制系统。
例:原始的数控机床进给系统就是开环控制系统。
指令输入到计算机控制系统Z中,带动步进电机运动,使工作台移动,产生位移输出。
在口常生活中,许多控制系统都可以理解成开环控制系统,如电风扇的转速是由档位决定的,不能根据环境温度自动调节;洗衣机定时系统是由功能和时间决定,不能根据所洗衣物清洁程度自动调节。
4、闭环控制系统是怎样实现控制作用的?请举例说明。
闭环控制系统:闭环控制(亦称为反馈控制,Feedback Control)是指能对输出量与输入量进行比较,并且将它们的偏差作为控制手段,以保持两者Z间预定关系的系统。
如:自动调温空调,当环境温度高于设定温度时,空调制冷系统自动开启,调定室温到设定值。
5、对自动控制系统的基本要求是什么?对控制系统的基本要求是:系统的稳定性、响应的快速性、响应的准确性。
6、试叙述电冰箱中温度控制系统的温度控制过程。
电冰箱温度控制系统由感温管,温度调节,执行动作等系统组成。
冰箱没工作时,感温管内气体遇热就膨涨,触点就将两原来断开的接触点靠在一起了。
冰箱在工作时,由于冰箱内制冷系统在给冰箱不段的输入冷气,就越来越冷,随着温度不短降低,感温管内的气体缩小,气垫就将断点段开,然而就将冰箱停止工作!7、试叙述骑自行车时的闭环控制过程。
习题41.(a) (b) (c)(d) (e) (f) 2.(1)(2)证明:s j σω=+代入1+G(s)H(s)=0*()()0s s b k s a +++=*()(())(())0jw jw b k jw a σσσ++++++=*2()()0k a b σσσω+++-=*20k b a ++=消去*k 得:222()a a ab σω++=-所以根轨迹是以(-a,0)的圆。
3.答案:(1)(2)(3)(4)4.答案:(1)分离点: 3.854d =-渐近线25,a a πσϕ=-=±,* 1.37K =,闭环系统稳定的*K 值的范围是*04K <<。
(2)()()()()()()()()()()()()23220.4150.4150.4159261818185221s s s s s s s s s s s ss s s s φ-+-+-+===+++++++++-提示:()*111004D s K =-==1当s 时,由特征方程可得. 5.答案:*K 的范围(0,2)6.7.答案:负反馈:正反馈:8.答案:⋃∞系统无超调的k值范围(0,0.68][23.34,)9. (1)(2)根据K 值可计算出系统的闭环极点为-2和-5。
123102, 5.1s s K s s s -==⇒=-=-+10.11.答案:⑴实轴根轨迹:[]3,2--,[]1,0-;渐近线:1a σ=-,2a πϕ=±;分离点:0.53d =-。
题4-11图⑵主导极点:1,20.7 1.2s j =-± ()0.5ξ=23K = 53K *=。
12.答案:*716K <<渐近线31,,a a πσϕπ=-=±,与虚轴的交点1,2316;0,7K K ωω====, 分离点:1d =-,所以闭环系统稳定的开环增益范围是*716K <<。
13. (1)1189.5p οθ=,分离点3,3s s =-=(舍)(2)509τ≤<14.答案:与虚轴的交点*1;K ω== *K >1系统稳定;*K ξ↑→↑平稳性变好;当*K →∝时,0.707ξ→,()c t 振荡性减小,快速性得以改善。