机械原理第四章4-2
- 格式:ppt
- 大小:1.87 MB
- 文档页数:30
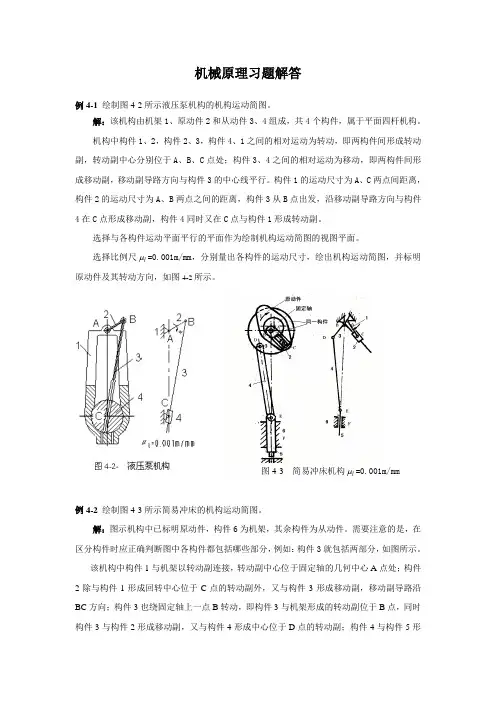
机械原理习题解答例4-1 绘制图4-2所示液压泵机构的机构运动简图。
解:该机构由机架1、原动件2和从动件3、4组成,共4个构件,属于平面四杆机构。
机构中构件1、2,构件2、3,构件4、1之间的相对运动为转动,即两构件间形成转动副,转动副中心分别位于A 、B 、C 点处;构件3、4之间的相对运动为移动,即两构件间形成移动副,移动副导路方向与构件3的中心线平行。
构件1的运动尺寸为A 、C 两点间距离,构件2的运动尺寸为A 、B 两点之间的距离,构件3从B 点出发,沿移动副导路方向与构件4在C 点形成移动副,构件4同时又在C 点与构件1形成转动副。
选择与各构件运动平面平行的平面作为绘制机构运动简图的视图平面。
选择比例尺l μ=0.001m/mm ,分别量出各构件的运动尺寸,绘出机构运动简图,并标明原动件及其转动方向,如图4-2所示。
例4-2 绘制图4-3所示简易冲床的机构运动简图。
解:图示机构中已标明原动件,构件6为机架,其余构件为从动件。
需要注意的是,在区分构件时应正确判断图中各构件都包括哪些部分,例如:构件3就包括两部分,如图所示。
该机构中构件1与机架以转动副连接,转动副中心位于固定轴的几何中心A 点处;构件2除与构件1形成回转中心位于C 点的转动副外,又与构件3形成移动副,移动副导路沿BC 方向;构件3也绕固定轴上一点B 转动,即构件3与机架形成的转动副位于B 点,同时构件3与构件2形成移动副,又与构件4形成中心位于D 点的转动副;构件4与构件5形图4-3 简易冲床机构l μ=0.001m/mm成中心位于E 点的转动副;构件5与机架6形成沿垂直方向的移动副。
该机构属于平面机构,因此选择与各构件运动平面平行的平面作为绘制机构运动简图的视图平面。
选择比例尺l μ=0.001m/mm ,量出各构件的运动尺寸,绘出机构运动简图,并标明原动件及其转动方向,如图4-3所示。
4-3 题4-3图为外科手术用剪刀。

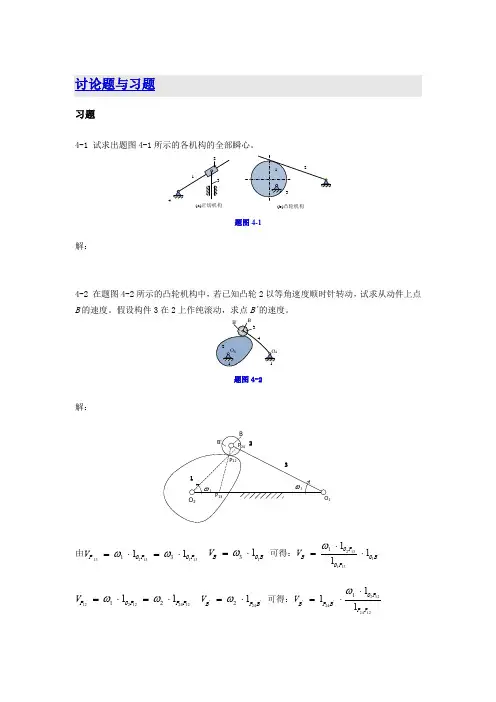
习题4-1 试求出题图4-1所示的各机构的全部瞬心。
4(a)正切机构(b)凸轮机构题图4-1解:4-2 在题图4-2所示的凸轮机构中,若已知凸轮2以等角速度顺时针转动,试求从动件上点B 的速度。
假设构件3在2上作纯滚动,求点B'的速度。
题图4-2解:BO 2P 13P 12P 24B'O 13ω1ω132由13113213l l 31P O P O PV ⋅=⋅=ωω B O B V 1l 3⋅=ω 可得:B O P O PO B V 1131132l l l 1⋅⋅=ω122412212l l 21P PP O P V ⋅=⋅=ωω '24'l 2BPB V ⋅=ω 可得:1224122'24'l l l 1P P PO BPB V ⋅⋅=ω4-3 在题图4-3所示的机构中,已知曲柄1顺时针方向匀速转动,角速度1=100rad/s ,试求在图示位置导杆3的角速度3的大小和方向。
3B 4C12A题图4-3解:因已知曲柄2的运动,而所求构件4的运动,所以要求取构件2和4的瞬心24P 。
根据瞬心的性质,得142441224224P P P P P ωωω== 所以1424122424P P P P ωω= 方向顺时针运动。
4-4 在题图4-4所示的机构中,已知:图示机构的尺寸,原动件1以匀角速度1沿逆时针方向转动。
试确定:(1)在图上标出机构的全部瞬心;(2)用瞬心法确定点M 的速度v M ,需写出表达式,并标出速度的方向。
1234Mω1题图4-4解:121ωP 12P 14P 24P 34MP 23P 13∞31214122412l l 12P P P PP V ⋅=⋅=ωωM P P P P P MP M V 241224121424l l l l 12⋅⋅=⋅=ωω4-5 在题图4-5所示的机构中,已知:图示机构的尺寸,原动件1以匀角速度1沿顺时针方向转动。
机械原理第四章答案【篇一:西北工业大学机械原理课后答案第4章】(a) (b)(c)解:(a)作铆钉机的机构运动简图及受力见下图(a)由构件3的力平衡条件有:fr?fr43?fr23?0?fr41?fd?0由构件1的力平衡条件有:fr21按上面两式作力的多边形见图(b)得??frfd?cot?(b)作压力机的机构运动简图及受力图见(c)由滑块5的力平衡条件有:?r65由构件2的力平衡条件有:r42 ?r45?0?r32?r12?0 其中 r42?r54按上面两式作力的多边形见图(d),得??gft(c) 对a点取矩时有 fr?a?fd?b ??其中a、b为fr、fd两力距离a 点的力臂。
??gftfdfr43rgdr41(a)(b)(d)解:1) 选定比例尺,?l?0.005绘制机构运动简图。
(图(a) )2)运动分析:以比例尺?v作速度多边形,如图 (b) 以比例尺?a作加速度多边形如图4-1 (c)ac??apc?23.44s2?210as2??aps2s2t?ancac2b?2???51502slbc?lbc3) 确定惯性力活塞3:fi3??m3as3??g3gac?3767(n) 方向与pc相反。
连杆2:fi32??m2as2??g2相反。
as2?5357(n) 方向与p?s2mi2??js2?2?218.8(n?m) (顺时针)总惯性力:fi?2?fi2?5357(n)lh2?mi2i2?0.04(m) (图(a) )(b)(c)解:1)求图a所示导轨副的当量摩擦系数fv,把重量g分解为g 左,g右g左?l2lg , g右?1g , fvg?ff左?ff右l1?l2l1?l2l?f??2??l1??fv??l1?l2l?f??2??l1??g??l1?l22)求图b所示转动副的摩擦圆半径?支反力fr左?l2lg ,fr右?1g l1?l2l1?l2假设支撑的左右两端均只在下半周上近似均匀接触。
《机械原理》第四章课后答案(孙恒版)回复关键词:机械原理即可获取其他章节答案资源第4章平面机构的力分析4-1何谓机构的动态静力分析?对机构进行动态静力分析的步骤如何?答: (1) 动态静力分析是指将惯性力视为一般外力加于相应构件上,再按静力学方法进行分析的过程。
(2)对机构进行动态静力学分析的步骤如下:①对机构作运动分析以确定在所要求位置时各构件的角加速度和质心加速度,求各构件的惯性力;②对机构进行拆分杆组,如有高副,应先进行高副低代;③从外力全部已知的构件组开始分析,逐步推算出未知构件;④对机构进行动态静力计算,求出运动副反力和平衡力的变化规律。
⑤如需考虑摩擦,可采用逐次逼近的方法。
4-2何谓质量代换法?进行质量代换的目的何在?动代换和静代换各应满足什么条件?各有何优缺点?静代换两代换点与构件质心不在一直线上可以吗?答: (1) 质量代换法是指为了简化构件惯性力的确定,把构件的质量按一定条件用集中于构件上某个选定点的假想集中质量来代替的方法。
(2)进行质量代换的目的简化惯性力的确定,代换后只需求各集中质量的惯性力,而无需求惯性力偶矩。
(3)动代换和静代换应满足的条件①动代换满足的条件:a.代换前后构件的质量不变;b.代换前后构件的质心位置不变;c.代换前后构件对质心轴的转动惯量不变。
②静动代换满足的条件:a.代换前后构件的质量不变;b.代换前后构件的质心位置不变。
采(4)动代换和静代换的优缺点①动代换的优缺点:a.优点代换后,构件的惯性力和惯性力偶都不会发生改变;b.缺点其代换点的位置不能随意选择,则会给工程计算带来不便。
②静代换的优缺点:a.优点代换后,构件的惯性力和惯性力偶都不会发生改变;b.缺点其代换点的位置不能随意选择,则会给工程计算带来不便。
②静代换的优缺点:a.优点两个代换点位置均可以任意选取,引起的误差能被一-般工程接受,常为工程上所采纳;b.缺点代换后,构件的惯性力偶会产生- -定误差。
4-2如图4-40所示,设已知四杆机构各构件的长度为a=300mm,b=600mm,c=450mm,d=500mm。
试问:(1)当取d为机架时,是否有曲柄存在,此时为什么机构?(2)若各杆长度不变,能否获得双曲柄机构和双摇杆机构?如何获得?(3)若a、b、c三杆长度不变,取杆d为机架,要获得曲柄摇杆机构,d的取值范围应为何值?解:(1)b为最长杆,a为最短杆满足杆长条件。
故机构有整转副。
且a为连架杆,故机构有曲柄存在,为曲柄摇杆机构。
(2)选择a杆为机架可以得到双曲柄机构。
选择c杆为机架可以得到双摇杆机构。
(3)若d为最长杆,则若b为最短杆,则故当时机构为曲柄摇杆机构。
4-5在如图4-41所示的连杆机构中,已知各构件的尺寸为:lAB=160mm,lBC=260mm,lCD=200mm,lAD=80mm,构件AB为原动件,沿顺时针方向匀速回转,试确定:(1)四杆机构ABCD的类型;(2)该机构的最小传动角γmin;(3)滑块F的行程速比系数K。
解:(1)lAD为最短杆,且为机架。
故该机构为双曲柄机构。
(2)故最小传动角γmin=13.33°。
(3)作图可知,极限位置时,曲柄位置的极位夹角θ=43°。
γγ+--=+--=⨯⨯=︒+-+=+-+=⨯⨯=︒222'222222''222()arccos 2260200(80160) arccos 2260200 13.33()arccos 2260200(80160) arccos 2260200 61.26BC CD AD AB BC CD BC CD AD AB BC CD4-6试设计一翻料四杆机构,其连杆机构BC=400mm ,连杆的两个位置关系如图4-22所示,要求机架AD 与B1C1平行,且在其下相距350mm 。
解:图解过程如图所示可得:AB=372.24mm ,CD=358.19mm ,AD=202.40mm 。