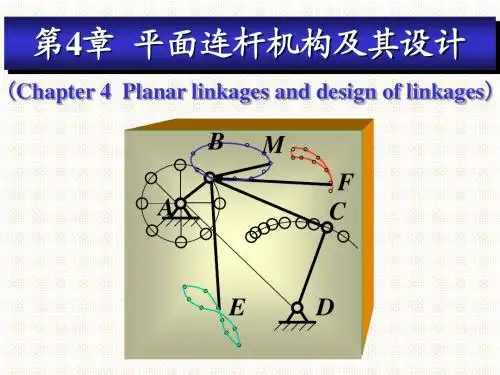
《机械原理》第四章 平面连杆机构及其设计
- 格式:pdf
- 大小:1.23 MB
- 文档页数:100
机械原理平面连杆机构及设计平面连杆机构是机械原理中最经典也是最重要的一种机构类型之一。
这种机构由多个刚性杆件组成,每个杆件都能在平面内移动,它们通过连接点(铰链/球头)相互连接。
平面连杆机构在机械工程领域中有着广泛的应用,能够实现很多不同的机械运动和工作原理。
平面连杆机构中最重要的构件是连杆,也就是连接各个零件的关键杆件,如果连杆设计不合适可能导致机构性能的下降。
因此,平面连杆机构的设计要受到重视,需要考虑以下几个因素。
一、长度比例连杆不同长度比例的设置,对整个机构的运动特性和反应速度有着很大的影响。
在设计平面连杆机构时,需要根据机构所要完成的任务,选择恰当的连杆长度比例,保证机构的平衡性和可靠性,以及使机构的工作效率更高。
二、铰链/球头的位置铰链/球头是平面连杆机构中的关键组成部分。
在设计平面连杆机构时,需要合理选择铰链/球头的位置,以达到机构所要完成的特定任务。
如果铰链/球头设置不当,或者位置过分集中,会使机构不平衡或失效。
因此,设计者需要考虑连杆的长度、位置、形状和角度等因素。
三、材质选择平面连杆机构的设计材料非常重要,它将直接影响到机构的质量和强度。
不同材料的连接部分,对于平面连杆机构的工作效率和稳定性有着非凡的意义。
因此,在设计时,应本着安全、可靠、实用的原则,选用优质、耐用的材料,确保机构长期稳定、可靠的工作。
以汽车减震器为例,汽车减震器中使用的是多连杆机构原理,作为一种基于平面连杆机构的机构类型,它通过几个连杆的特定结构和布局,使得整个减震器能够更好地适应路况,缓解车辆的震动和冲击。
汽车减震器的设计考虑了多个因素,包括结构的稳定性和可靠性,杆件的材质和尺寸比例等。
总结来说,平面连杆机构是机械原理中非常重要的一种机构类型,广泛应用于机械和工程领域,需要经过仔细的设计和考虑,才能达到最好的运转效果。
设计者需要从多个维度进行考虑,包括长度比例、铰链/球头的位置、材质选择等等。
这些因素的合理应用,能够使平面连杆机构能够更好地适应不同的任务需求,达到最高的技术性能和质量水平。
机械原理平面连杆机构及设计平面连杆机构是一种最为基本的机械结构,由于其结构简单、运动可靠等特点,被广泛应用于各种机械设备中。
本文将对平面连杆机构进行介绍,并探讨其设计原理。
平面连杆机构是由至少一个定点和至少三个连杆组成的机构。
定点为固定参考点,连杆是由铰链连接的刚性杆件。
连杆可以分为连杆和曲柄,连杆连接在定点上,曲柄则旋转。
平面连杆机构的运动由这些连杆的位置和相互连接方式决定。
平面连杆机构的设计原理基于以下几个方面:1.运动分析:在设计平面连杆机构之前,首先需要进行运动分析,确定所需的运动类型。
运动类型可以是旋转、平移、摆动、滑动等。
通过运动分析,可以确定连杆的长度和相互连接的方式。
2.运动性能:平面连杆机构的优点是运动可靠,但运动性能也是需要考虑的重要因素。
例如,设计中需要考虑速度、加速度、力和力矩等参数,以满足机构的运动要求。
3.静力学分析:平面连杆机构在工作过程中可能会受到外力的作用,因此需要进行静力学分析。
静力学分析可以确定机构的力矩和应力,从而确定设计的合理性。
4.运动合成:在进行平面连杆机构的设计过程中,需要进行连杆的运动合成。
运动合成是指通过选择适当的连杆长度和连接方式,实现所需的运动类型。
5.运动分解:运动分解是指将合成的运动分解为各个连杆的运动。
通过运动分解,可以确定每个连杆的运动规律,从而进行设计。
当以上原理得到了充分的了解和运用后,可以进行平面连杆机构的具体设计。
具体的设计包括以下几个步骤:1.确定所需的运动类型:根据机械设备的需求,确定所需的运动类型,例如旋转、平移、摆动等。
2.运动分析:对机构进行运动分析,确定连杆的位置和连接方式。
根据机构的运动要求和外力作用,确定连杆的长度。
3.动力学分析:进行动力学分析,确定机构运动时的力学参数,如速度、加速度、力和力矩等。
4.运动合成与分解:根据所需的运动类型,进行运动合成和分解,确定连杆的运动规律。
5.结构设计:根据上述分析和计算结果,进行结构设计。
机械原理课程教案一平面连杆机构及其分析与设计一、教学目标及基本要求1掌握平面连杆机构的基本类型,掌握其演化方法。
2,掌握平面连杆机构的运动特性,包括具有整转副和存在曲柄的条件、急回运动、机构的行程、极限位置、运动的连续性等;3.掌握平面连杆机构运动分析的方法,学会将复杂的平面连杆机构的运动分析问题转换为可用计算机解决的问题。
4.掌握连杆机构的传力特性,包括压力角和传动角、死点位置、机械增益等;正确理解自锁的概念,掌握确定自锁条件的方法。
5,了解平面连杆机构设计的基本问题,掌握根据具体设计条件及实际需要,选择合适的机构型式;学会按2~3个刚体位置设计刚体导引机构、按2~3个连架杆对应位置设计函数生成机构及按K值设计四杆机构;对机构分析与设计的现代解析法有清楚的了解。
二、教学内容及学时分配第一节概述(2学时)第二节平面连杆机构的基本特性及运动分析(4.5学时)第三节平面连杆机构的运动学尺寸设计(3.5学时)三、教学内容的重点和难点重点:1.平面四杆机构的基本型式及其演化方法。
2.平面连杆机构的运动特性,包括存在整转副的条件、从动件的急回运动及运动的连续性;平面连杆机构的传力特性,包括压力角、传动角、死点位置、机械增益。
3.平面连杆机构运动分析的瞬心法、相对运动图解法和杆组法。
4.按给定2~3个位置设计刚体导引机构,按给定的2~3个对应位置设计函数生成机构,按K值设计四杆机构。
难点:1.平面连杆机构运动分析的相对运动图解法求机构的加速度。
2.按给定连架杆的2~3个对应位置设计函数生成机构。
四、教学内容的深化与拓宽平面连杆机构的优化设计。
五、教学方式与手段及教学过程中应注意的问题充分利用多媒体教学手段,围绕教学基本要求进行教学。
在教学中应注意要求学生对基本概念的掌握,如整转副、摆转副、连杆、连架杆、曲柄、摇杆、滑块、低副运动的可逆性、压力角、传动角、极位夹角、行程速度变化系数、死点、自锁、速度影像、加速度影像、装配模式等;基本理论和方法的应用,如影像法在机构的速度分析和加速度分析中的应用、连杆机构设计的刚化一反转法等。