最速下降法求解这一无约束的最优化问题
- 格式:doc
- 大小:48.50 KB
- 文档页数:2
Matlab中的最优化问题求解方法近年来,最优化问题在各个领域中都扮演着重要的角色。
无论是在工程、经济学还是科学研究中,我们都需要找到最优解来满足特定的需求。
而Matlab作为一种强大的数值计算软件,在解决最优化问题方面有着广泛的应用。
本文将介绍一些Matlab中常用的最优化问题求解方法,并探讨其优缺点以及适用范围。
一. 无约束问题求解方法1. 最速下降法最速下降法是最简单且直观的无约束问题求解方法之一。
其基本思想是沿着梯度的反方向迭代求解,直到达到所需的精度要求。
然而,最速下降法的收敛速度通常很慢,特别是在局部极小值点附近。
2. 共轭梯度法共轭梯度法是一种改进的最速下降法。
它利用了无约束问题的二次函数特性,通过选择一组相互共轭的搜索方向来提高收敛速度。
相比于最速下降法,共轭梯度法的收敛速度更快,尤其适用于大规模优化问题。
3. 牛顿法牛顿法是一种基于二阶导数信息的优化方法。
它通过构建并求解特定的二次逼近模型来求解无约束问题。
然而,牛顿法在高维问题中的计算复杂度较高,并且需要矩阵求逆运算,可能导致数值不稳定。
二. 线性规划问题求解方法1. 单纯形法单纯形法是一种经典的线性规划问题求解方法。
它通过在可行域内进行边界移动来寻找最优解。
然而,当问题规模较大时,单纯形法的计算复杂度会大幅增加,导致求解效率低下。
2. 内点法内点法是一种改进的线性规划问题求解方法。
与单纯形法不同,内点法通过将问题转化为一系列等价的非线性问题来求解。
内点法的优势在于其计算复杂度相对较低,尤其适用于大规模线性规划问题。
三. 非线性规划问题求解方法1. 信赖域算法信赖域算法是一种常用的非线性规划问题求解方法。
它通过构建局部模型,并通过逐步调整信赖域半径来寻找最优解。
信赖域算法既考虑了收敛速度,又保持了数值稳定性。
2. 遗传算法遗传算法是一种基于自然进化过程的优化算法。
它模拟遗传操作,并通过选择、交叉和变异等操作来搜索最优解。
遗传算法的优势在于其适用于复杂的非线性规划问题,但可能需要较长的计算时间。
最速下降法(Steepest Descent Method)是一种数值优化算法,用于求解无约束优化问题的最小值。
下面是最速下降法的一般解题步骤:
1.定义目标函数:首先,需要明确要优化的目标函数。
这个函数通常表示为f(x),其中
x 是优化变量。
2.初始化起始点:选择一个合适的起始点x0,作为最速下降法的初始点。
3.计算梯度:计算目标函数在当前点的梯度,即∇f(x)。
这可以通过对目标函数进行偏
导数计算得到。
4.确定搜索方向:将梯度反向取负作为搜索方向d,即d = -∇f(x)。
5.确定步长:确定沿着搜索方向移动的步长,也称为学习率或步长因子。
常见的选择
方法有固定步长、线性搜索和精确线搜索等。
6.更新当前点:根据步长和搜索方向,更新当前点x,即x = x + αd,其中α 表示步
长。
7.判断终止条件:判断是否满足终止条件,可以是达到预定的迭代次数、目标函数值
变化很小或梯度变化很小等。
8.若不满足终止条件,则返回第3步,重新计算梯度,并重复3-7步骤,直到满足终
止条件。
最速下降法的关键在于选择合适的步长和搜索方向。
步长过大可能导致无法收敛,步长过小可能导致收敛速度慢。
搜索方向的选择应该保证在当前点能够使目标函数值下降最快。
需要注意的是,最速下降法可能会陷入局部最小值,而无法达到全局最小值。
为了克服这个问题,可以考虑使用其他优化算法,如共轭梯度法、牛顿法等。
运筹学实习报告姓名: xxxxxxxxxx 学号: xxxxxxxxxxx 专业班级: xxxxxxxxxxxx 2 0 1 3年 7 月 0 4 日题目:用最速下降法求解无约束非线性规划问题 摘要:无约束最优化问题的求解方法分为解析法和直接法两大类。
解析法需要计算函数的梯度,其中最速下降法就属于解析法中的一种。
对于一个无约束非线性规划利用最速下降法求解,首先需要确定其优化方向,此优化方向应该选择为f 在当前点处的负梯度方向,利用一维搜索法找出沿此方向上的最小值及其对应点,此后将该点作为新的出发点重复上述过程,直到达到允许的误差为止。
本文通过理论的计算方法,进一步分析,最后用c++编程实现求出允许误差内的最优解。
此编程可用于计算符合下列形式的函数求最优解过程:f(x)=a[0]x1*x1+a[1]x2*x2+a[2]x1*x2+a[3]x1+a[4]x2+a[5]其中:a[i] (i=0,1,2,3,4,5) 为函数的系数。
本文以“ 李占利 主编,中国矿业大学出版社出版”的《最优化理论与方法》 第五章 “无约束最优化方法,5.1 最速下降法 ”例5—1为实例,首先利用上述迭代的方法,计算出各迭代点的函数值,梯度及其模。
然后应用c++语言编程,得到在精度范围内的精确最优解。
C++编程计算的最优解为 : T x x ]0329218.0,00823045.0[)3(*-==。
即转化为分数结果为:⎥⎦⎤⎢⎣⎡-==412432)3(*x x 。
满足精度要求的模为:1010736154.0||||)3(=<=εp 。
关键词:无约束非线性规划 解析法 最速下降法 梯度 模 最优解一、算法思想无约束最优化方法中的最速下降法首先需要确定其优化方向,此优化方向应该选择为f 在当前点处的负梯度方向,利用一维搜索法找出沿此方向上的最小值及其对应点,此后将该点作为新的出发点重复上述过程,直到达到允许的误差为止。

最速下降法例题
最速下降法(Steepest Descent Method)是一种用于求解无约
束优化问题的数值方法,也称为最陡下降法或梯度下降法,其基本思
想是在每一次迭代中,选择当前点到目标函数值下降最快的方向进行
搜索,从而不断逼近极小值点。
下面,我们将通过一个简单的例题来
介绍最速下降法的应用。
假设有一个二次函数 f(x,y) = x^2 + 2y^2 - 2x - 8y + 8 ,
我们希望使用最速下降法求解该函数的极小值点。
首先,我们需要计
算该函数的梯度向量:
grad(f(x,y)) = (2x - 2, 4y - 8)
接着,我们随机选择一个初始点 (x0, y0) = (0, 0) ,并设置
一个精度要求ϵ = 0.001 。
然后,按照以下步骤进行迭代:
1. 计算当前点的梯度向量 grad(f(xk,yk)) ;
2. 计算当前点到极小值点的最速下降方向 dk = -grad(f(xk,yk)) ;
3. 沿着最速下降方向 dk 移动一定的步长 tk ,得到新的点 (xk+1,
yk+1) = (xk,yk) + tk*dk ;
4. 如果目标函数值的下降量Δk = f(xk+1,yk+1) - f(xk,yk) < ϵ,则停止迭代,否则返回步骤 1 。
通过不断迭代,最终可以得到该二次函数的极小值点(x,y) ≈ (1,2) ,函数值为f(x,y) ≈ 2 。
这就是最速下降法找到极小值点的
基本流程。
值得注意的是,最速下降法有时会因为其“最陡”下降方向不够
精准而表现出较慢或者振荡的特点,因此在实际应用中需要结合其他
优化算法来提高求解速度和准确性。
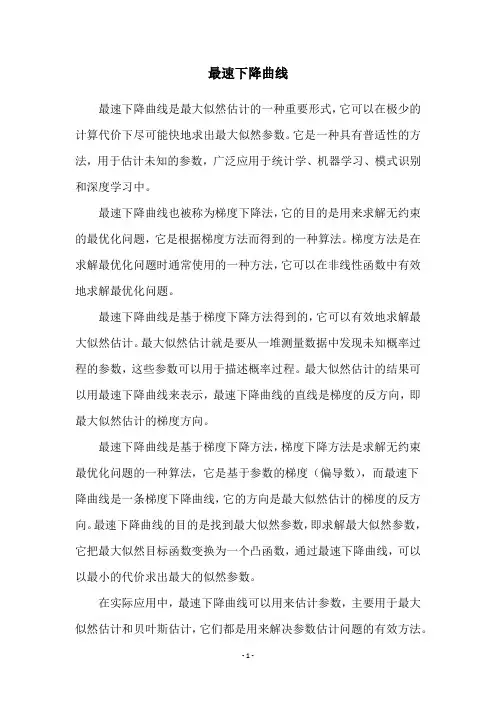
最速下降曲线最速下降曲线是最大似然估计的一种重要形式,它可以在极少的计算代价下尽可能快地求出最大似然参数。
它是一种具有普适性的方法,用于估计未知的参数,广泛应用于统计学、机器学习、模式识别和深度学习中。
最速下降曲线也被称为梯度下降法,它的目的是用来求解无约束的最优化问题,它是根据梯度方法而得到的一种算法。
梯度方法是在求解最优化问题时通常使用的一种方法,它可以在非线性函数中有效地求解最优化问题。
最速下降曲线是基于梯度下降方法得到的,它可以有效地求解最大似然估计。
最大似然估计就是要从一堆测量数据中发现未知概率过程的参数,这些参数可以用于描述概率过程。
最大似然估计的结果可以用最速下降曲线来表示,最速下降曲线的直线是梯度的反方向,即最大似然估计的梯度方向。
最速下降曲线是基于梯度下降方法,梯度下降方法是求解无约束最优化问题的一种算法,它是基于参数的梯度(偏导数),而最速下降曲线是一条梯度下降曲线,它的方向是最大似然估计的梯度的反方向。
最速下降曲线的目的是找到最大似然参数,即求解最大似然参数,它把最大似然目标函数变换为一个凸函数,通过最速下降曲线,可以以最小的代价求出最大的似然参数。
在实际应用中,最速下降曲线可以用来估计参数,主要用于最大似然估计和贝叶斯估计,它们都是用来解决参数估计问题的有效方法。
最速下降曲线也被广泛应用于统计学、机器学习、模式识别和深度学习等领域,它可以非常快速准确地估计出参数,对于求解复杂问题,最速下降曲线可以提供有效的优化方法。
综上所述,最速下降曲线是一种重要的统计方法,用来估计参数,它在机器学习、模式识别、深度学习和统计学等领域都有着重要的作用,它的主要目的是求解最大似然参数,可以以最小的代价求出最大似然参数。
最速下降曲线的优点是求解时间短,精度高,可以非常有效的求解复杂的优化问题,它有助于提高估计模型的精度。
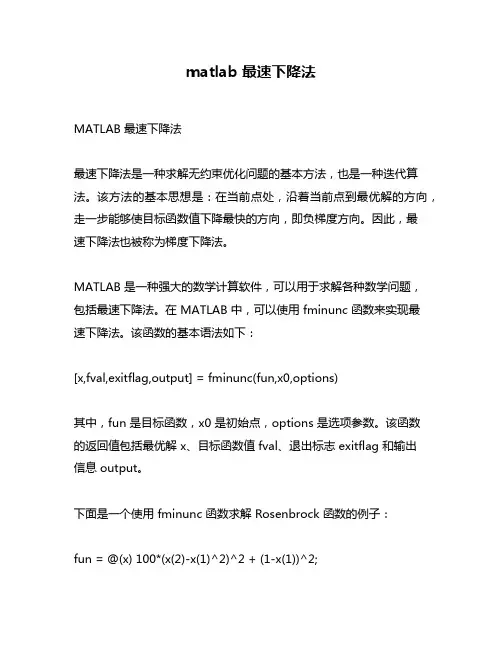
matlab 最速下降法MATLAB 最速下降法最速下降法是一种求解无约束优化问题的基本方法,也是一种迭代算法。
该方法的基本思想是:在当前点处,沿着当前点到最优解的方向,走一步能够使目标函数值下降最快的方向,即负梯度方向。
因此,最速下降法也被称为梯度下降法。
MATLAB 是一种强大的数学计算软件,可以用于求解各种数学问题,包括最速下降法。
在 MATLAB 中,可以使用 fminunc 函数来实现最速下降法。
该函数的基本语法如下:[x,fval,exitflag,output] = fminunc(fun,x0,options)其中,fun 是目标函数,x0 是初始点,options 是选项参数。
该函数的返回值包括最优解 x、目标函数值 fval、退出标志 exitflag 和输出信息 output。
下面是一个使用 fminunc 函数求解 Rosenbrock 函数的例子:fun = @(x) 100*(x(2)-x(1)^2)^2 + (1-x(1))^2;x0 = [-1.2,1];options =optimoptions('fminunc','Display','iter','Algorithm','quasi-newton');[x,fval,exitflag,output] = fminunc(fun,x0,options);在上面的例子中,Rosenbrock 函数是一个经典的无约束优化问题,其目标函数为:f(x) = 100*(x2-x12)2 + (1-x1)2该函数的最优解为 (1,1),最小值为 0。
使用 fminunc 函数求解该问题,可以得到最优解 x = (1,1),最小值 fval = 2.9387e-11。
需要注意的是,最速下降法是一种基本的优化方法,但其收敛速度较慢,容易陷入局部最优解。
机器学习算法系列最速下降法牛顿法拟牛顿法最速下降法(Gradient Descent)最速下降法是一种常用的优化算法,用于求解无约束的最小化问题。
其原理是通过不断迭代更新参数的方式来逼近最优解。
在最速下降法中,每次迭代的方向是当前位置的负梯度方向,即沿着目标函数下降最快的方向前进。
具体地,对于目标函数f(x),在当前位置x_k处的梯度为g_k=▽f(x_k),则下一次迭代的位置x_{k+1}可以通过以下公式计算:x_{k+1}=x_k-α*g_k其中,α 是一个称为学习率(learning rate)的参数,用于控制每次迭代的步长。
最速下降法的优点是简单易实现,收敛速度较快。
然而,它也有一些缺点。
首先,最速下降法的收敛速度依赖于学习率的选择,过小的学习率会导致收敛速度过慢,而过大的学习率可能会导致跳过最优解。
其次,最速下降法通常会在目标函数呈现弯曲或者高度相关的情况下表现不佳,很难快速收敛到最优解。
牛顿法(Newton's Method)牛顿法是一种通过二阶导数信息来优化的算法,可以更快地收敛到目标函数的最优解。
在牛顿法中,每次迭代的位置x_{k+1}可以通过以下公式计算:x_{k+1}=x_k-(H_k)^{-1}*▽f(x_k)其中,H_k是目标函数f(x)在当前位置x_k处的黑塞矩阵。
黑塞矩阵描述了目标函数的二阶导数信息,可以帮助更准确地估计参数的更新方向。
牛顿法的优点是收敛速度较快,特别是对于目标函数呈现弯曲或者高度相关的情况下,相较于最速下降法可以更快地达到最优解。
然而,牛顿法也有一些缺点。
首先,计算黑塞矩阵的代价较高,尤其是当参数较多时。
其次,黑塞矩阵可能不可逆或者计算代价较大,这时可以通过使用拟牛顿法来避免。
拟牛顿法(Quasi-Newton Method)拟牛顿法是一类基于牛顿法的优化算法,通过估计黑塞矩阵的逆来逼近最优解,从而避免了计算黑塞矩阵的代价较高的问题。
在拟牛顿法中,每次迭代的位置x_{k+1}可以通过以下公式计算:x_{k+1}=x_k-B_k*▽f(x_k)其中,B_k是一个对黑塞矩阵逆的估计。
哈哈,我已经实现了最速下降法语牛顿发的结合,并且还可以动画演示其求解最优值的迭代过程。
都已在程序上实现了。
(matlab).运行的时,最速下降精度不要弄得太小,到后面的牛顿精度就可以取任意值了。
ticclc;clear;syms x1 x2G=[];G=input('请输入想x1^2,x2^2,x1*x2,x1,x2,常系数,如[1,2,3,4,5,6] 系数向量=:');a=G(1,1);b=G(1,2);c=G(1,3);d=G(1,4);e=G(1,5);g=G(1,6);f=a*x1^2+b*x2^2+c*x1*x2+d*x1+e*x2+g;%画出原始图像figure;x11=-100:0.5:100;x22=x11;[x11,x22]=meshgrid(x11,x22);f11=a.*x11.^2+b*x22.^2+c*x11.*x22+d.*x11+e.*x22+g;surf(f11),grid on,hold on;%画出原始图像df1=diff(f,x1);df2=diff(f,x2);%对函数进行求一阶导DF=[df1;df2];df11=diff(df1,x1);df12=diff(df1,x2);df21=diff(df2,x1);df22=diff(df2,x2);%这里进行求函数二阶导数DEE=[df11,df12;df21,df22];x=input('请输入x的初始值为x=[x1,x2],x=:');x=x';E=input('请输入你所要求的最速下降法的精度数(一般取3~5)E=:');%这里进行一些相关初始值的计算T=[];d=T;T(:,1)=subs(DF,[x1,x2],[x(1),x(2)]);TH=subs(DEE,[x1,x2],[x(1),x(2)]);%这里进行一些相关初始值的计算disp('由于你输入的初始值,这里将开始最速下降法搜寻:');for k=1:100000d(:,1)=-T(:,1);%d(k)是x(k+1)=x(k)+A(k)*d(k)A(1)=(T(:,1)'*T(:,1))/(T(:,1)'*TH*T(:,1));TH=subs(DEE,[x1,x2],[x(1,k),x(2,k)]);T(:,k)=subs(DF,[x1,x2],[x(1,k),x(2,k)]);d(:,k+1)=-T(:,k);A(k)=(T(:,k)'*T(:,k))/(T(:,k)'*TH*T(:,k));KLJ(:,k)=norm(T(:,k));GG(k)=subs(f,[x1,x2],[x(1,k),x(2,k)]);if norm(T(:,k))<Edisp('有这里你就进入牛顿法求最优了');disp(' ');disp('FX就是最速下的解 ')FX=subs(f,[x1,x2],[x(1,k),x(2,k)])disp(' ');disp('对应的x值为 ');x(:,k)break;endx(:,k+1)=x(:,k)+A(k)*d(:,k);endtoc%画出最速下降迭代点最终停留位置figure;plot3(x11,x22,f11,'r'),grid on;for tk=1:kh1=line( 'Color' ,[0 1 0], 'Marker' , '.' , 'MarkerSize' ,20, 'EraseMode' , 'xor' ); set(h1, 'xdata' ,x(1,tk), 'ydata' ,x(2,tk), 'zdata' , GG(tk));drawnow; % 刷新屏幕pause(0.1);endfop1=getframe(gcf)image(fop1.cdata)%画出最速下降迭代点最终停留位置ticY=x(:,k);EE=input('请输入牛顿最终的精度系数EE=:');TT(:,1)=subs(DF,[x1,x2],[Y(1),Y(2)]);THH=subs(DEE,[x1,x2],[Y(1),Y(2)]);aa=1;disp('程序可以运行到这里');for kk=1:10000dd(:,kk)=-inv(THH)*TT(:,kk);Y(:,kk+1)=Y(:,kk)+ aa*dd(:,kk);THH=subs(DEE,[x1,x2],[Y(1,kk),Y(2,kk)]);TT(:,kk+1)=subs(DF,[x1,x2],[Y(1,kk+1),Y(2,kk+1)]);PP=norm(TT(:,kk));GG1(kk)=subs(f,[x1,x2],[Y(1,kk),Y(2,kk)]);if PP<EEdisp('到这里您已经得到全局最优解了');FXX=subs(f,[x1,x2],[Y(1,kk),Y(2,kk)])disp(' ');disp('对应的x值为: ');Y(:,kk)break;endendFXX=subs(f,[x1,x2],[Y(1,kk),Y(2,kk)])toc%画出最终极值点停留位置figure;plot3(x11,x22,f11,'r'),grid on;for J=1:kkh2=line( 'Color' ,[0 1 0], 'Marker' , '.' , 'MarkerSize' ,40, 'EraseMode' , 'xor' ); set(h2, 'xdata' ,Y(1,J), 'ydata' ,Y(2,J), 'zdata' , GG1(1,J));pause(0.1);fop=getframe(gcf);image(fop.cdata);enddisp('现在程序已经结束了');%画出最终极值点停留位置[attach]3912[/attach]。
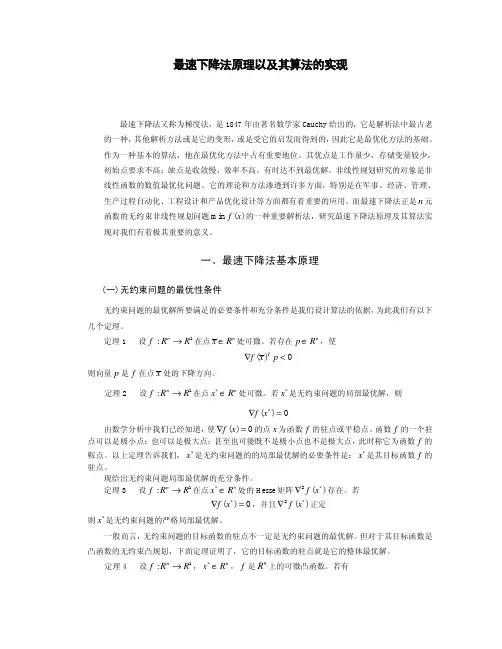
西安电子科技大学课程论文数学软件与实验最速下降法求最优解姓名:方正阳学号:07117020班级:07117107112016、最速下降法求最优解1 2 n,然后MATLAB 结课大作业摘要:最速下降法,又称为梯度法,是一种重要的无约束最优化方法。
它是 1847年由著名数学家 Cauchy 给出的,其他解析方法或是它的变形,或是受它 启发而得到,因此它是最优化方法的基础。
该法将 n 维问题转化为一系列 不断迭代过程中沿负梯度方向用一维搜索方法寻优的问题,本次程序设计 利用最速下降法算法,反复迭代,最终收敛于局部最优点,即为解出的二 元函数的无约束非线性规划问题 minf(x,y)。
引言:最优化理论作为运筹学中的一个重要理论方法,在工业生产,金融经济活 动,工商管理,国防建设,计算机应用中,都有着重要的应用。
最优化理论 通过给出生产活动中的各类实际问题的数学模型,通过最优化方法,寻求 该问题的最优解或满意解。
最速下降算法是最优化理论中常见的一个重要 算法,理论证明:最速下降算法在一定条件下是收敛的,它能够有效地求 解一部分无约束最优化问题。
一、 实验目的熟悉最速下降法算法思想和步骤,用 MATLAB 语言编程最速下降法 求最优值。
二、 实验要求在最优化计算方法中,要求解 y = f (x 1, x 2 , , x n ) 的局部最小值,可以采用如下的方法进行迭代计算:先给出初始点 x 0 = (x 0 , x 0 , , x 0)根据其梯度方向 ∇f (x 0),计算一元函数 y (λ1 ) = min f (x λ≥0 0-λ⋅∇f (x 0 )) ,并1 0 0得到x = x -λ1 ⋅∇f (x ) 。
如此反复迭代,最终收敛于局部最优点。
实现 该算法,求 的最优值,a,b,c,d 自定(非 0)三、 实验假设考虑到参数的随机性、代表性,验证程序的正确性、典型性,在此 我们从两个角度出发,一是在 abcd 值确定的情况下改变初始搜索位置 x0,看函数最优解是否相同;二是初始搜索位置 x0 相同,abcd 值不同的 情况下,看函数最优解是否相同。
最速下降法的基本思路最速下降法是一种求解无约束优化问题的迭代算法,其基本思路是从当前点出发,沿着当前点到最优解的方向进行移动,并以一定的步长进行迭代更新,直到达到最优解或者满足一定的停止准则。
本文将从以下几个方面详细介绍最速下降法的基本思路。
一、最速下降法的数学模型在介绍最速下降法的基本思路之前,我们先来看看最速下降法所要求解的数学模型。
对于一个无约束优化问题:min f(x),x∈R^n其中f(x)为目标函数,x为自变量向量。
我们希望求出目标函数的全局最小值或局部最小值。
二、梯度和梯度方向在介绍最速下降法的基本思路之前,我们需要先了解两个概念:梯度和梯度方向。
1、梯度对于一个可微函数f(x),在点x处,它的梯度定义为:grad f(x)=[∂f/∂x1, ∂f/∂x2, …, ∂f/∂xn]T其中T表示矩阵转置。
梯度是一个向量,它指向函数在该点上升最快的方向,其模长表示该方向上函数增加的速率。
2、梯度方向对于一个可微函数f(x),在点x处,它的梯度方向定义为:-df/dx=-(∂f/∂x1, ∂f/∂x2, …, ∂f/∂xn)T梯度方向是一个向量,它指向函数在该点下降最快的方向,其模长表示该方向上函数减少的速率。
三、最速下降法的基本思路有了梯度和梯度方向的概念之后,我们就可以来介绍最速下降法的基本思路了。
最速下降法是一种基于负梯度方向进行迭代更新的优化算法。
具体来说,它的基本思路可以分为以下几个步骤:1、初始化首先需要选择一个初始点x0作为起始点。
2、计算负梯度在当前点xk处计算目标函数f(x)的负梯度-df/dx,并将其作为移动方向。
3、确定步长确定一个合适的步长αk,使得目标函数沿着移动方向能够有足够大的下降。
4、迭代更新根据当前点和移动方向以及步长进行迭代更新:xk+1 = xk + αk*(-df/dx)5、停止准则判断是否满足停止准则,如果满足,则停止迭代;否则返回步骤2。
四、最速下降法的收敛性最速下降法是一种保证收敛的优化算法,但是其收敛速度较慢。
最速下降法和共轭梯度法的区别
最速下降法和共轭梯度法都是求解无约束优化问题的迭代方法,它们的区别如下:
1. 方向选择:最速下降法每次迭代选择梯度的方向作为搜索方向,而共轭梯度法每次迭代选择一个共轭方向,不同的迭代步骤之间方向是相互垂直的。
2. 收敛速度:共轭梯度法通常比最速下降法更快地收敛到最优解。
共轭梯度法利用了问题的特殊结构,通过选择共轭方向进行迭代,可以跳过一些搜索方向,从而加快收敛速度。
3. 存储需求:最速下降法仅需要存储当前点的梯度信息,而共轭梯度法需要额外存储用于计算共轭方向的历史梯度信息,因此共轭梯度法的内存需求更高。
4. 线性搜索:最速下降法一般使用线性搜索确定每次迭代的步长,而共轭梯度法可以利用解析公式或其他更高效的非线性搜索方法来选择合适的步长。
总体来说,共轭梯度法在收敛速度和存储需求方面有优势,特别适用于求解大规模优化问题。
但最速下降法相对简单,并且对一些非二次凸函数仍然有效,因此在某些情况下也是一种有效的选择。
最速下降法的改进及收敛性证明的开题报告一、选题背景与意义最速下降法是求解无约束优化问题的一种基本算法,其思想是在当前点的梯度方向上取负梯度方向的最小值作为下降方向,沿着该方向进行迭代,寻找全局最小值点或局部最小值点。
然而,最速下降法迭代速度慢,易产生震荡,并可能无法收敛到最优解。
因此,研究最速下降法的改进及收敛性证明,对于优化算法的设计和实现具有重要意义。
二、研究目标和内容本文的研究目标是探究最速下降法的改进算法及其收敛性证明,内容包括以下几个方面:1. 介绍最速下降法的基本思想、原理和不足之处;2. 总结最速下降法的改进算法,如共轭梯度法、牛顿法等,并对它们的优缺点进行对比分析;3. 探讨最速下降法及其改进算法的收敛性证明,包括在凸函数和一般情形下的证明方法;4. 对比不同算法在实际问题中的应用表现,评估其优缺点。
三、研究方法和思路本文将采用文献调研和理论分析相结合的方法。
首先,通过查阅相关文献和资料,总结最速下降法的基本思想和算法流程,以及常见的改进算法及其原理,掌握各种方法的应用场景和优缺点。
其次,对最速下降法及其改进算法的收敛性证明进行理论分析,探讨凸函数和一般情况下的证明方法,加深对算法的理解和认识。
最后,结合具体的实例,对比不同算法在实际问题中的应用表现,评估各种算法的优缺点。
四、预期结果本文预期结果如下:1. 系统梳理最速下降法的基本思想、优缺点及其改进算法;2. 掌握最速下降法及其改进算法的收敛性证明方法;3. 在实例分析中,评估各种算法的优缺点,为问题求解提供一定的参考和建议;4. 为优化算法的改进和实际应用提供一定的理论基础和实践指导。
五、论文结构第一章:绪论1.1 选题背景和研究意义1.2 研究目标和内容1.3 研究方法和思路1.4 预期结果1.5 论文结构第二章:相关理论介绍2.1 最速下降法的基本思想2.2 最速下降法的算法流程2.3 最速下降法的不足之处第三章:最速下降法的改进算法3.1 共轭梯度法3.2 牛顿法3.3 拟牛顿法第四章:最速下降法及其改进算法的收敛性证明4.1 凸函数下的证明4.2 一般情形下的证明第五章:算法比较与实例分析5.1 算法比较5.2 实例分析与应用评估第六章:总结与展望6.1 研究总结6.2 展望下一步研究工作。
最速下降法matlab代码最速下降法(Steepest Descent Method)是一种优化算法,用于求解无约束最优化问题。
下面是一个使用MATLAB实现最速下降法的代码示例:```matlabfunction x = steepest_descent(f, grad_f, x0, tol, max_iter)% f: 目标函数% grad_f: 目标函数的梯度% x0: 初始点% tol: 迭代停止的容差% max_iter: 最大迭代次数x = x0; % 初始点iter = 0; % 迭代次数while norm(grad_f(x)) > tol && iter < max_iterp = -grad_f(x); % 计算搜索方向% 一维搜索,选择合适的步长alphaalpha = backtracking_line_search(f, grad_f, x, p);x = x + alpha * p; % 更新变量xiter = iter + 1;endendfunction alpha = backtracking_line_search(f, grad_f, x, p, alpha0, rho, c)% f: 目标函数% grad_f: 目标函数的梯度% x: 当前点% p: 搜索方向% alpha0: 初始步长% rho: 减小步长的比例因子% c: Armijo-Goldstein条件的常数因子if nargin < 6rho = 0.5; % 默认减小步长的比例因子endif nargin < 7c = 0.1; % 默认Armijo-Goldstein条件的常数因子endalpha = alpha0; % 初始步长while f(x + alpha * p) > f(x) + c * alpha * grad_f(x)' * palpha = rho * alpha; % 减小步长endend```在上述代码中,`steepest_descent`函数实现了最速下降法的主要逻辑。
第五题:
解:选择类型为:
2/13()x t
y t x e
x =+
其中123,,x x x 是待求参数。
根据最小二乘原理,参数123,,x x x 是下面优化问题的解。
[]2
8
1231
m in (,,)()i i i f x x x y t y ==
-å
用最速下降法求解这一无约束的最优化问题。
zuiyouhua.m
function sh=zuiyouhua(x0) % x0为初始猜测值 syms x y z a al;
%====================================== t=[0.2,1,2,3,5,7,11,16];
r1=[5.05,8.88,11.63,12.93,14.15,14.73,15.30,15.60]; minf=0; for i=1:8
r(i)=x*exp(y/t(i))+z-r1(i); %构造最小二乘最优化的目标函数 minf=r(i)^2+minf;
end
%====================================== f1=diff(minf,x); f2=diff(minf,y);
f3=diff(minf,z); %求目标函数的梯度 F=[f1,f2,f3];
%====================================== Fx1= -subs(F,{x,y,z},x0); Fx=Fx1/norm(Fx1); k=0;
%====================================== %最速下降法核心迭代程序 while 1 x1=x0+a*Fx;
P=subs(minf,{x,y,z},x1);
xx1=xianxing(P); %调用线性搜索函数 al=huangjing(P,xx1); %调用黄金分割法函数; x0=x0+al*Fx;
Fx1= -subs(F,{x,y,z},x0); Fx=Fx1/norm(Fx1); if norm(Fx1)<5e-4 sh=x0;
return; end end
%====================================== function xx=xianxing(Pa) %一维搜索法线性搜索函数 aa=findsym(Pa); a1=1; h=0.5; k=0; t1=2; while 1 a2=a1+h;
Pa1=subs(Pa,aa,a1); Pa2=subs(Pa,aa,a2); if Pa2< Pa1 h=t1*h; a0=a1; a1=a2; k=k+1;
if k>1000
disp('迭代步数太多,可能不收敛!'); end else if k==0 h=-h; a0=a2; else
c1=min(a0,a2); d1=max(a0,a2); xx=[c1,d1]; return; end end
end
%====================================== function al1=huangjing(Pb,xx2)
%黄金分割法函数 ab=findsym(Pb); c=xx2(1); d=xx2(2);
lamda=0.618;
eps1=1e-3; u=d-lamda*(d-c); v=c+lamda*(d-c); N=1000; pu=subs(Pb,ab,u); pv=subs(Pb,ab,v); for K=1:N
if abs(v-u)<eps1 g=(u+v)/2; al1=g; return; end
if pu <= pv c=c; d=v; v=u; pv=pu;
u=d-lamda*(d-c); pu=subs(Pb,ab,u); else c=u; d=d; u=v; pu=pv;
v=c+lamda*(d-c); pv=subs(Pb,ab,v); end if K==N
disp('迭代次数过多,不收敛!'); end end
%==================================== >> x0=[0,0,0]; >> zuiyouhua(x0) ans =
11.3459 -1.0730 4.9972
所以:
12311.3459, 1.0730, 4.9972x x x ==-=
%=====================================================================================
画图程序:
x=[11.3459,-1.0730,4.9972];
tdata=[0.2,1,2,3,5,7,11,16];
ydata=[5.05,8.88,11.63,12.93,14.15,14.73,15.30,15.60];
f=x(1)*exp(x(2)./tdata)+x(3); plot(tdata,ydata,'o',tdata,f,'r-')
计算所得得图为:。