理论力学(周衍柏)绪论及第一章
- 格式:ppt
- 大小:11.93 MB
- 文档页数:187

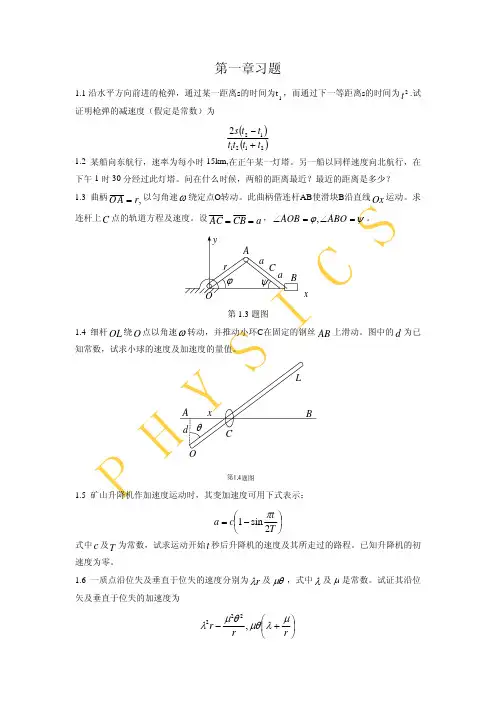
第一章 质点力学矿山升降机作加速度运动时,其变加速度可用下式表示:⎪⎭⎫ ⎝⎛-=T t c a 2sin1π 式中c 及T 为常数,试求运动开始t 秒后升降机的速度及其所走过的路程。
已知升降机的初速度为零。
解 :由题可知,变加速度表示为⎪⎭⎫ ⎝⎛-=T t c a 2sin1π 由加速度的微分形式我们可知dtdv a =代入得 dt T t c dv ⎪⎭⎫ ⎝⎛-=2sin 1π 对等式两边同时积分dt T t c dv t v⎰⎰⎪⎭⎫⎝⎛-=002sin 1π 可得 :D T t c T ct v ++=2cos 2ππ(D 为常数)代入初始条件:0=t 时,0=v , 故c T D π2-=即⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+=12cos 2T t T t c v ππ 又因为dtds v =所以 =ds dt T t T t c ⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+12cos 2ππ 对等式两边同时积分,可得:⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛-+=t T t T T t c s 2sin 22212πππ 直线FM 在一给定的椭圆平面内以匀角速ω绕其焦点F 转动。
求此直线与椭圆的焦点M 的速度。
已知以焦点为坐标原点的椭圆的极坐标方程为()θcos 112e e a r +-=式中a 为椭圆的半长轴,e 为偏心率,常数。
解:以焦点F 为坐标原点题1.8.1图则M 点坐标 ⎩⎨⎧==θθsin cos r y r x 对y x ,两式分别求导⎪⎩⎪⎨⎧+=-=θθθθθθcos sin sin cos r r yr r x 故()()22222cos sin sin cos θθθθθθ r r r r y xv ++-=+=222ωr r+= 如图所示的椭圆的极坐标表示法为()θcos 112e e a r +-=对r 求导可得(利用ωθ= ) 又因为()()221cos 111ea e e a r -+-=θ即 ()rer e a --=21cos θ所以()()2222222221211cos 1sin e r e ar r ea --+--=-=θθ故有 ()2222224222sin 1ωθωr e a r e v +-=()2224221e a r e -=ω()()]1211[2222222e r e ar r e a --+--22ωr +()()⎥⎦⎤⎢⎣⎡--+-⋅-=2222222221121e e ar r r e e a r ω()r r a b r -=2222ω即 ()r a r br v -=2ω(其中()b a e b ,1222-=为椭圆的半短轴)质点作平面运动,其速率保持为常数。
理论力学教程周衍柏《理论力学教程》是由周衍柏编写的一本力学学科的教材。
该教程主要涵盖了力学的基本概念、原理和计算方法,适用于大学力学课程的教学和学习。
第一章介绍了力学的基本概念和研究对象。
力学研究物体在力的作用下的运动规律,分为静力学和动力学两部分。
静力学研究物体平衡的条件和平衡状态,动力学研究物体在力的作用下的运动规律和能量变化。
第二章详细介绍了质点的运动规律。
讨论了质点的位移、速度和加速度的定义和计算方法,以及质点在直线上的运动和曲线上的运动。
介绍了质点的直线运动中的均匀运动和变速运动,以及曲线运动中的圆周运动。
第三章讨论了刚体的运动规律。
刚体是指无论在受力作用下还是不受力作用下,各部分之间的相对位置和相互间的距离保持不变的物体。
详细介绍了刚体的平动和转动,以及刚体的匀速旋转和变速旋转。
第四章介绍了力的作用、合力和力矩的概念。
力是产生物体运动或形变的原因,合力是多个力合成后的结果,力矩是力对物体产生转动的效果。
讨论了力的叠加原理和解析法,以及力的平衡条件和平衡的判定方法。
第五章讨论了静力学力学系的平衡条件和平衡的判定方法。
静力学力学系指在静止时,物体所受到的各个力及其力矩之间的平衡关系。
介绍了力的杠杆原理和力的分解原理,以及力矩的计算方法和力的平衡条件。
第六章介绍了动力学力学系的平衡条件和平衡的判定方法。
动力学力学系指在运动时,物体所受到的各个力及其力矩之间的平衡关系。
讨论了动力学力学系中的杠杆原理和力的合成原理,以及动力学平衡条件的计算方法。
第七章讨论了万有引力和弹性力的性质和计算方法。
介绍了万有引力的概念和计算公式,以及弹性力的概念和弹性势能的计算方法。
讨论了物体在重力和弹性力作用下的平衡位置和平衡条件,以及重心和回复力的概念。
第八章介绍了刚体的平衡条件和平衡的判定方法。
讨论了刚体在力和力矩作用下的平衡关系,以及刚体平衡条件和刚体静力学平衡的判定方法。
详细介绍了刚体平衡的三个条件和平衡关系的计算方法。

阿第一章思考题解答1.1答:平均速度是运动质点在某一时间间隔t t t ∆+→内位矢大小和方向改变的平均快慢速度,其方向沿位移的方向即沿t ∆对应的轨迹割线方向;瞬时速度是运动质点在某时刻或某未知位矢和方向变化的快慢程度其方向沿该时刻质点所在点轨迹的切线方向。
在0→∆t 的极限情况,二者一致,在匀速直线运动中二者也一致的。
1.2答:质点运动时,径向速度r V 和横向速度θV 的大小、方向都改变,而r a 中的r 只反映了r V 本身大小的改变,θa 中的θθ r r +只是θV 本身大小的改变。
事实上,横向速度θV 方向的改变会引起径向速度r V 大小大改变,2θ r -就是反映这种改变的加速度分量;经向速度rV 的方向改变也引起θV 的大小改变,另一个θr 即为反映这种改变的加速度分量,故2θ r r a r -=,.2θθθr r a +=。
这表示质点的径向与横向运动在相互影响,它们一起才能完整地描述质点的运动变化情况1.3答:内禀方程中,n a 是由于速度方向的改变产生的,在空间曲线中,由于a 恒位于密切面内,速度v 总是沿轨迹的切线方向,而n a 垂直于v 指向曲线凹陷一方,故n a 总是沿助法线方向。
质点沿空间曲线运动时,0,0≠=b b F a z 何与牛顿运动定律不矛盾。
因质点除受作用力F ,还受到被动的约反作用力R ,二者在副法线方向的分量成平衡力0=+b b R F ,故0=b a 符合牛顿运动率。
有人会问:约束反作用力靠谁施加,当然是与质点接触的周围其他物体由于受到质点的作用而对质点产生的反作用力。
有人也许还会问:某时刻若b b R F 与大小不等,b a 就不为零了?当然是这样,但此时刻质点受合力的方向与原来不同,质点的位置也在改变,副法线在空间中方位也不再是原来b a 所在的方位,又有了新的副法线,在新的副法线上仍满足00==+b b b a R F 即。
这反映了牛顿定律得瞬时性和矢量性,也反映了自然坐标系的方向虽质点的运动而变。

理论力学教程 (周衍柏)(第四版)介绍《理论力学教程 (周衍柏)(第四版)》是一本经典的力学教材,由著名力学学者周衍柏编写。
本教程系统讲解了理论力学的基本概念、原理和方法,是理论力学领域的入门教材。
本文档将对该教程的主要内容进行介绍,并以Markdown文本格式输出。
第一章:基本概念1.1 力学的研究对象力学是研究物体运动规律的科学,它将物体分为质点和刚体两个研究对象。
质点被简化为没有具体形状和大小的点,刚体则具有固有形状和大小。
1.2 运动的描述运动可以通过位置、速度和加速度等量来描述。
位置是描述物体在空间中的位置关系,速度是位置随时间的变化率,加速度是速度随时间的变化率。
1.3 牛顿力学的三大定律牛顿力学的三大基本定律为惯性定律、动量定律和作用反作用定律。
惯性定律描述了物体在无外力作用下保持匀速直线运动的性质,动量定律描述了物体受力作用下速度发生变化的规律,作用反作用定律描述了力的相互作用导致的物体运动规律。
第二章:质点运动学2.1 一维直线运动一维直线运动是质点只沿一条直线方向运动的情况。
可以通过物体的位移、速度和加速度来描述其一维直线运动规律。
2.2 二维平面运动二维平面运动是质点在平面内任意方向上运动的情况。
可以通过物体的平面位置、速度和加速度来描述其二维平面运动规律。
2.3 相对运动相对运动是指两个运动物体相对于彼此的运动情况。
可以通过相对速度来描述两个物体之间的相对运动规律。
第三章:质点动力学3.1 牛顿第二定律牛顿第二定律描述了质点受力作用下速度的变化规律,即力等于质量乘以加速度。
3.2 动量定理动量定理描述了质点受力作用下动量的变化规律,即力是动量随时间的变化率。
3.3 机械能守恒定律机械能守恒定律适用于只受重力和弹性力作用的质点,描述了质点机械能(动能和势能之和)在运动过程中的守恒性质。
第四章:刚体静力学4.1 刚体的概念刚体是指形状和大小在运动过程中保持不变的物体。
刚体静力学研究的是刚体受力平衡时的性质和规律。