弹塑性力学应力
- 格式:ppt
- 大小:652.50 KB
- 文档页数:41
弹性力学:1.应力:应力是描述一点内力各个方向上单位面积上的作用力的极限值,由于内力具有多重方向性因而应力也有多重方向性,需要用9个量描述,但表面独立的量有6个,实际上这6个量之间真正独立的只有3个。
2.应变;应变是描述一点的变形程度的物理量,变形包括伸缩和方向改变。
一点的应变是一个复杂的物理现象,需要6个量描述,但独立的量只有3个。
3.体积力:作用在物体每一点的外力。
比如每一点都有的重力。
4.面力:作用在物体表面的外力。
比如水给大坝表面的压力。
5.斜面应力公式:一点任一方向的面上的应力与这一点的6个坐标应力之间的关系,这个关系用于应力边界条件和斜面应力的计算。
物体表面的任一点的应力和该点的面力是相同的大小和方向。
6.平衡微分方程:分析一点:反映一点的体积力与该点的6个坐标应力之间的受力平衡的方程,方程是偏微分形式的方程。
直角坐标下的方程形式上简单,其它坐标的复杂些。
7.可能应力:满足应力边界条件和平衡微分方程的应力场(该点进入弹塑性阶段时还要满足应力形式的屈服条件),因为应力对应的应变不一定是真实应变,因此只满足应力方程的应力只是可能应力而不一定是真实应力。
8.位移:分析一点:一点变形前后的位置差值。
变形体研究的位移是该点空间位置的连续函数。
9.几何方程:分析一点:反映一点位移与该点应变之间关系的方程。
直角坐标的几何方程形式上是最简单的,而其它坐标的复杂些。
10.变形协调方程:变形体不出现开裂或堆叠现象,即一点变形后产生的位移是唯一的,这时对一点的应变分量之间的相互约束关系。
直角坐标下的方程形式上简单,其它坐标的复杂些。
11.物理方程:这是材料变形的固有性质,反映一点应力与应变之间的约束关系,这种约束关系和坐标选取无关,即各种坐标下的物理关系都是相同的函数。
12.弹性:弹性指物体在外界因素(外荷载、温度变化等)作用下引起变形,在外界因素撤除后,完全恢复其初始的形状和尺寸的性质。
13.完全弹性:材料变形性质只有弹性而没有其他如流变、塑性等变形性质。


弹塑性⼒学总复习《弹塑性⼒学》课程第⼀篇基础理论部分第⼀章应⼒状态理论1.1 基本概念1.应⼒的概念应⼒:微分⾯上内⼒的分布集度。
从数学上看,应⼒sPF s ??=→?0lim ν由于微分⾯上的应⼒是⼀个⽮量,因此,它可以分解成微分⾯法线⽅向的正应⼒νσ和微分⾯上的剪应⼒ντ。
注意弹塑性⼒学中正应⼒和剪应⼒的正负号规定。
2.⼀点的应⼒状态(1)⼀点的应⼒状态概念凡提到应⼒,必须同时指明它是对物体内哪⼀点并过该点的哪⼀个微分⾯。
物体内同⼀点各微分⾯上的应⼒情况,称为该点的应⼒状态。
(2)应⼒张量物体内任⼀点不同微分⾯上的应⼒情况⼀般是不同的,这就产⽣了⼀个如何描绘⼀点的应⼒状态的问题。
应⼒张量概念的提出,就是为了解决这个问题。
在直⾓坐标系⾥,⼀点的应⼒张量可表⽰为=z zy zx yz yyx xz xy x ij στττστττσσ若已知⼀点的应⼒张量,则过该点任意微分⾯ν上的应⼒⽮量p就可以由以下公式求出:n m l p xz xy x x ττσν++= (1-1’a ) n m l p yz y yx y τστν++=(1-1’b )n m l p z zy zx z σττν++=(1-1’c )由式(1-1),还可进⼀步求出该微分⾯上的总应⼒p 、正应⼒νσ和剪应⼒v τ: 222z y x p p p p ++=(1-2a )nl mn lm n m l zx yz xy z y x τττσσσσν222222+++++=22ννστ-=p(1-2c )(3)主平⾯、主⽅向与主应⼒由⼀点的应⼒状态概念可知,通过物体内任⼀点都可能存在这样的微分⾯:在该微分⾯上,只有正应⼒,⽽剪应⼒为零。
这样的微分⾯即称为主平⾯,该⾯的法线⽅向即称为主⽅向,相应的正应⼒称为主应⼒。
主应⼒、主⽅向的求解在数学上归结为求解以下的特征问题:}{}]{[i n i ij n n σσ=(1-3)式中,][ij σ为该点应⼒张量分量构成的矩阵,n σ为主应⼒,}{i n 为主⽅向⽮量。
我所认识的应力和应变关系在这之前我认识了应力和应变的概念、性质以及从静力学和几何学的角度出发所得到的平衡方程和几何方程。
但是平衡方程仅反映了应力分量和外力分量的关系;几何方程仅建立了位移分量和应变分量的关系。
而谈到应力与应变的关系,对于可变形固体,在弹塑性力学中,在外力的作用下,其将发生变形。
变形分为两个阶段,弹性阶段和塑性阶段。
在弹性阶段,发生的弹性变形可以完全恢复,它是一个可逆过程。
此时,应力与应变的关系是一一对应的,是单值函数关系。
而在塑性阶段,所发生的塑性变形是不可以恢复的,是不可逆过程。
相对应的,塑性阶段的应力应变的关系是非线性关系,不存在一一对应的关系。
我所认识的应力和应变的关系就是本构关系。
本构关系也称为物理关系,它反应的是可变形材料的固有属性,实质上是一组联系力学参数和运动参数的方程式,也就是我们所说的本构方程。
在说应力与应变的关系之前,先说一下本构关系的相关影响因素,包括材料、环境、加载类型、以及加载速度。
即,),,(T t f εσ=。
另外,有各种各样的本构系,比如:弹性本构关系、塑性本构关系、粘弹性本构关系、粘塑性本构关系、各向同性本构关系、各向同性本构关系等等。
简单情况的本构关系:应力和应变的关系包括弹性和塑性的应力应变关系。
我们所说的是线性弹性体的应力应变关系,又分为简单应力状态和复杂应力状态。
在简单拉伸情况下,理想弹性材料的应力和应变的关系很简单,就是材料力学中的胡克定律: 。
而在塑性阶段,应力应变之间不再是简单的胡克定律,而是 。
另外,简单拉伸情况下的卸载定律是 。
在后继弹性阶段,也就是卸载后重新加载的材料会继续发生新的塑性变形,在此时的屈服称为后继屈服,相应的屈服点称为后继屈服点。
初始屈服和后继屈服的不同是:第一,应力的数值不一样,后继屈服的应力值更大;第二,屈服点的个数不一样。
初始屈服点只有一个,而后继屈服点会有好多个,则其对应的应力值也会有很多个。
最后,在卸载全部载荷后进行反向加载比如说把拉伸改成压缩,此时会产生Bauschinger 效应。
我所认识的应力和应变之间的关系在单向应力状态下,理想弹性材料的应力和应变之间的关系是满足胡克定律的一一对应的关系。
在三维应力状态下描述一点处的应力状态需要9个分量,相应的应变状态也要用9个应变分量来表示。
对于一个具体的理想弹性体来讲,如果在三维应力状态下,应力与应变之间仍然有线性一一对应关系存在,则称这类弹性体为线性弹性体。
所谓各向弹性体,从力学意义上讲,就是弹性体内的每一点沿各个方向的力学性质都完全相同的。
这类线性弹性体独立的唐兴常数只有两个。
各向同性体本构关系特点:1.主应力与主应变方向重合。
2.体积应力与体积应变成比例。
3.应力强度与应变强度成比例。
4.应力偏量与应变偏量成比例。
工程应用中,常把各向同性弹性体的本构方程写下成11()11()11()x y z xy xy y x z yz yz z y x xz xz E G E G E G εσμσσγτεσμσσγτεσμσσγτ⎧⎡⎤=-+=⎣⎦⎪⎪⎪⎡⎤=-+=⎨⎣⎦⎪⎪⎡⎤=-+=⎪⎣⎦⎩,式中分别为弹性模量、泊松比和剪切模量。
在E G μ、、这三个参数之间,实际上独立的常量只有两个,它们之间存在关系为()21E G μ=+。
屈服条件:弹性和塑性的最主要区别在于变形是可以恢复。
习惯上,根据破坏时变形的大小把工程材料分为脆性材料和塑性材料两类。
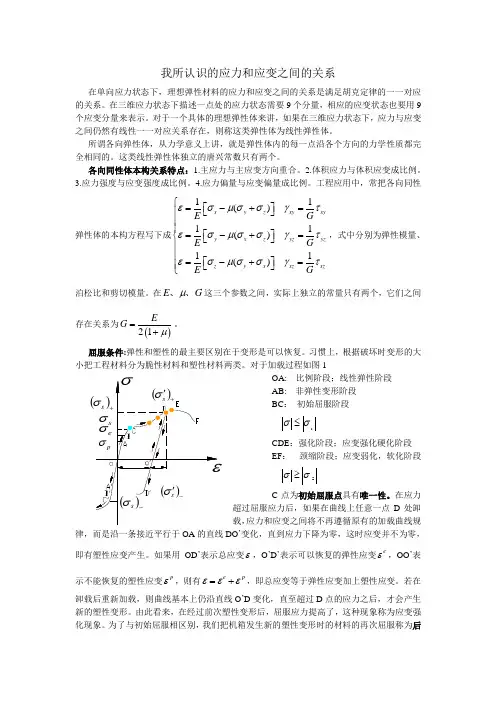
对于加载过程如图1OA: 比例阶段;线性弹性阶段AB: 非弹性变形阶段 BC : 初始屈服阶段 s σσ≤ CDE :强化阶段;应变强化硬化阶段EF : 颈缩阶段;应变弱化,软化阶段s σσ≥ C 点为初始屈服点具有唯一性。
在应力超过屈服应力后,如果在曲线上任意一点D 处卸载,应力和应变之间将不再遵循原有的加载曲线规律,而是沿一条接近平行于OA 的直线DO ’变化,直到应力下降为零,这时应变并不为零,即有塑性应变产生。
如果用OD ’表示总应变ε,O ’D ’表示可以恢复的弹性应变eε,OO ’表示不能恢复的塑性应变p ε,则有e p εεε=+,即总应变等于弹性应变加上塑性应变。
有效应力原理的基本概念有效应力原理是弹塑性力学的基本原理之一,它用于描述材料中的应力状态和变形情况。
有效应力表示材料内的真正应力负荷,排除了由于材料中的孔隙、裂纹或微观缺陷引起的局部应力集中效应。
有效应力原理的主要目的是通过假设材料中的应力分布是均匀的,并将材料中各部分应力之间的关系表示为一个统一的应力张量。
有效应力原理的基本概念如下:1. 应力与变形关系:根据应力-应变曲线,可以将材料的力学行为划分为弹性和塑性阶段。
弹性阶段中,应力与应变成正比,且应力释放后材料恢复到初始状态。
而在塑性阶段,应力超过一定临界值时,材料开始发生可持续的形变,并且在去除外部应力后,材料只能恢复部分变形。
2. 应力状态:一个物体内的应力状态通常由一个代表应力的应力张量来描述。
在三维空间中,应力张量由九个应力分量组成,分别表示正应力和剪应力。
在有效应力原理中,这些应力分量被重新定义为有效应力分量,用于描述材料内部的真实应力状态。
3. Mohr-Coulomb准则:有效应力原理的基础是Mohr-Coulomb准则,它假设材料中的剪应力强度只与有效应力相关。
Mohr-Coulomb准则是一种经验公式,可以用于计算不同材料在不同应变速率和温度下的剪切强度。
4. 孔隙和裂纹对应力的影响:孔隙和裂纹是材料中最常见的缺陷,它们会引起应力集中,导致局部应力增大。
有效应力原理通过忽略这些缺陷的影响,将材料中的应力分布视为均匀的,从而简化了材料的力学分析。
5. 有效应力张量的计算:由于有效应力原理假设了均匀的应力分布,因此可以使用均匀应力分布的计算方法来计算有效应力张量。
常见的计算方法包括:平均应力法、应力不变量法和应变能密度法等。
总结来说,有效应力原理是一种简化材料力学分析的方法,它排除了缺陷对应力分布的影响,用一个统一的应力张量来描述材料内的应力状态。
在应用有效应力原理时,需要考虑材料的性质、受力情况和外部环境等因素,并结合真实的力学实验数据来计算有效应力张量,用于工程结构的设计与分析。