最优化方法-线性规划的基本定理
- 格式:ppt
- 大小:341.00 KB
- 文档页数:20
线性规划知识点总结线性规划是一种数学优化方法,用于解决线性约束条件下的最优化问题。
它在各个领域都有广泛的应用,包括经济学、工程学、管理学等。
本文将对线性规划的基本概念、模型构建、求解方法以及应用领域进行详细介绍。
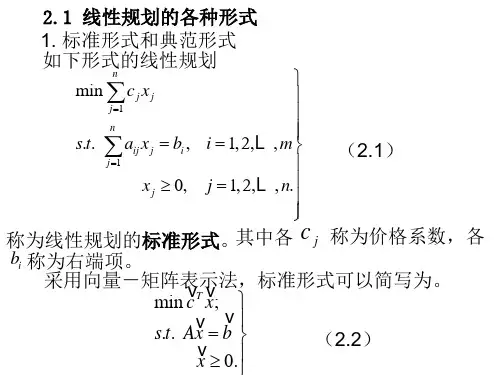
一、基本概念1. 目标函数:线性规划的目标是最大化或者最小化一个线性函数,称为目标函数。
目标函数通常表示为Z = c1x1 + c2x2 + ... + cnxn,其中ci为系数,xi为决策变量。
2. 约束条件:线性规划的决策变量需要满足一系列线性约束条件,常用形式为a1x1 + a2x2 + ... + anxn ≤ b,其中ai为系数,b为常数。
3. 可行解:满足所有约束条件的决策变量取值称为可行解。
4. 最优解:在所有可行解中,使目标函数取得最大值或者最小值的解称为最优解。
二、模型构建1. 决策变量:根据具体问题确定需要优化的变量,通常用xi表示。
2. 目标函数:根据问题要求确定目标函数的系数,进而确定是最大化还是最小化。
3. 约束条件:根据问题中给出的条件,建立约束条件方程。
4. 非负约束:决策变量通常需要满足非负约束条件,即xi ≥ 0。
三、求解方法1. 图形法:对于二维线性规划问题,可以使用图形法进行求解。
首先绘制约束条件的直线,然后确定可行域,最后在可行域内找到目标函数的最优解。
2. 单纯形法:对于多维线性规划问题,常使用单纯形法进行求解。
单纯形法通过不断迭代,逐步接近最优解。
它基于线性规划的基本定理,即最优解一定在可行解的顶点上。
3. 整数规划:当决策变量需要取整数值时,可以使用整数规划方法进行求解。
整数规划问题通常更加复杂,求解时间较长。
四、应用领域1. 生产计划:线性规划可以用于确定最佳的生产计划,使得生产成本最小化或者利润最大化。
2. 运输问题:线性规划可以用于确定最佳的运输方案,使得运输成本最小化。
3. 资源分配:线性规划可以用于确定最佳的资源分配方案,使得资源利用率最高。

第五章线性规划线性规划(Linear Programming,简记为LP)是数学规划的一个重要的分支,其应用极其广泛.1939年,前苏联数学家康托洛维奇(Л.B.Kah )在《生产组织与计划中的数学方法》一书中,最早提出和研究了线性规划问题.1947年美国数学家丹泽格(G. B. Dantzig)提出了一般线性规划的数学模型及求解线性规划的通用方法─单纯形方法,为这门科学奠定了基础.此后30年,线性规划的理论和算法逐步丰富和发展.1979年前苏联数学家哈奇扬提出了利用求解线性不等式组的椭球法求解线性规划问题,这一工作有重要的理论意义,但实用价值不高.1984年在美国工作的印度数学家卡玛卡(N. Karmarkar)提出了求解线性规划的一个新的内点法,这是一个有实用价值的多项式时间算法.这些为线性规划更好地应用于实际提供了完善的理论基础和算法.第一节线性规划问题及其数学模型一、问题的提出例1 某工厂在计划期内要安排生产Ⅰ、Ⅱ两种产品,已知条件如表所示。
问应如何安排计划使该工厂获利最多?ⅠⅡ现有资源设备原材料A 原材料B 14248台时16kg12kg每件利润23ⅠⅡ现有资源设备原材料A 原材料B 1402048台时16kg12kg每件利润23解: 设x 1、x 2 分别表示在计划期内产品Ⅰ、Ⅱ的产量。
12max 23z x x =+..s t 1228x x +≤1416x ≤2412x ≤12,0x x ≥二、线性规划问题的标准型112211112211211222221122123max ..,,0n nn n n n m m m mn n mn z c x c x c x s t a x a x a x b a x a x a x b a x a x a x b x x x x =+++⎧⎪+++=⎪⎪+++=⎨⎪⎪+++=⎪≥⎩,,其中1,,0m b b ≥11max ..,1,2,,0,1,2,,nj jj nij j i j j z c x s t a x b i mx j n=====≥=∑∑ 12(,,,)T n c c c =c 12(,,,)Tn x x x =x 12(,,,)Tm b b b =b 111212122212n nm m mn a a a a a a a a a ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦A 12[,,,]n = p p pmax ..()Tz s t ⎧=⎪=≥⎨⎪≥⎩c x Ax b b x 001max ..()Tnj j j z s tx =⎧=⎪⎪=≥⎨⎪⎪≥⎩∑c xp bb x 00对于不是标准形式的线性规划问题,可以通过下列方法将线性规划的数学模型化为标准形式:(1)目标函数的转换对min z 可以化max()z -(2)右端项的转换对0i b <,给方程两边同时乘以1-(3)约束条件的转换约束条件为≤方程左边加上一个变量,称为松弛变量约束条件为≥方程左边减上一个变量,称为剩余变量(4)变量的非负约束变量j x 无限制时,令,,0j j j j j x x x x x ''''''=-≥变量0j x ≤时,令j jx x '=-例将下列线性规划模型转化为标准形式12312312312312min 23..7232500x x x s t x x x x x x x x x x x -+-⎧⎪++≤⎪⎪-+≥⎨⎪--=-⎪≥≥⎪⎩,解(1)变量的非负约束令345x x x =-1245max 233x x x x -+-..s t 612457x x x x x ++-+=712452x x x x x -+--=12453225x x x x -++-=§2 两变量线性规划问题的图解法例1 求下列线性规划的解12121212max ..284300z x x s t x x x x x x =+⎧⎪+≤⎪⎪≤⎨⎪≤⎪≥≥⎪⎩,解(1)画可行域c A B D C 2x 1x O (2)画出目标函数的梯度向量:(3)作目标函数的一条等值线,120x x z +=将等值线沿梯度方向移动当等值线即将离开可行例2 求下列线性规划的解12121212max 2..284300z x x s t x x x x x x =+⎧⎪+≤⎪⎪≤⎨⎪≤⎪≥≥⎪⎩,解(1)画可行域c A B D C 2x 1x O (2)画出目标函数的梯度向量:(3)作目标函数的一条等值线,1202x x z +=将等值线沿梯度方向移动当等值线即将离开可行域时与可行域“最后的交点点为问题的最优解例3 求下列线性规划的解12121212max ..2200z x x s t x x x x x x =+⎧⎪-≤⎪⎨-≥-⎪⎪≥≥⎩,c2x 1x O无解例4 求下列线性规划的解12121212min 3..123600z x x s t x x x x x x =-⎧⎪≤⎪⎨≥⎪⎪≥≥⎩++,2x 1x O线性规划问题的性质:(1)线性规划的可行域为凸集,顶点个数有限.若可行域非空有界,则可行域为凸多边形.(2)线性规划可能有唯一最优解,可能有无数多个最优解,也可能无解最优解.无最优解可能是目标函数在可行域上无界,也可能可行域为空集.(3)若线性规划有最优解,则最优解必可在可行域的某个顶点达到.若两个顶点都为最优解,那么这两点连线上的所有点都是线性规划的最优解.§3 线性规划解的概念及其性质1 线性规划解的概念考虑线性规划问题max ..()Tz s t ⎧=⎪=≥⎨⎪≥⎩c x Ax b b x 00定义.1 矩阵A 中任何一组m 个线性无关的列向量构成的可逆矩阵B 称为线性规划的一个基矩阵与这些列向量对应的变量称为基变量(basis variable )其余变量称为基对应的非基变量(nonbasis variable )B 若设一个基为12(,,)m B p p p = ,12,,,m x x x ——为基B 对应的基变量1,,m n x x + ——为基B 对应的非基变量1B m x x x ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦1m N n x x x +⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦12(,,,)m m n ++= N p p p (,)=A B N 从而令=Ax b 则(,)N x ⎡⎤=⎢⎥⎣⎦B x B N b11B Nx B b B Nx --=-B N Bx Nx b+=令0N x =则1B x B b-=10B b -⎡⎤⎢⎥⎣⎦——基本解(basis solution )满足10B b -⎡⎤≥⎢⎥⎣⎦,=≥0Ax b x 的基本解——基本可行解(basis feasible solution )对应的基称为可行基(feasible basis ).B 可以写成即:定义4 若基本可行解中所有基变量都为正,这样的基本可行解称为非退化解(non-degenerate solution).若基本可行解中某基变量为零,这样的基本可行解称为退化解(degenerate solution).例1212112max ..28400z x x s t x x x x x =-⎧⎪+≤⎪⎨≤⎪⎪≥≥⎩,标准化得:12123141234max ..28400,00z x x s t x x x x x x x x x =-⎧⎪++=⎪⎨+=⎪⎪≥≥≥≥⎩,,12341210(,,,)1001⎡⎤==⎢⎥⎣⎦A p p p p 子阵是否为基基变量非基变量基本解目标函数值134(,)=B p p 34,x x 12,x x (0,0,8,4)是231(,)=B p p 31,x x 24,x x (4,0,4,0)312(,)=B p p 12,x x 34,x x (4,2,0,0)424(,)=B p p 24,x x 13,x x (0,4,0,4)-4514(,)=B p p 14,x x 23,x x (8,0,0,4)-是是是是042基本可行解1x O(4,0)(4,2)(0,4)(8,0)2x 顶点2 解的判别定理定理1 最优解的判别准则设B 为线性规划LP 的一个基,1(1)0-≥B b 1(2)T T--≥0Bc B A c 则基对应的基本可行解1-⎡⎤⎢⎥⎣⎦0B b 是LP 的最优解.1(1,2,,)σ--== TBj j j c B p c j n 为变量对应的检验数j x 112[0,,0,,,]σσσ-++-= ,T TBm m n c B A c 显然基变量对应得检验数为零.定理2 无穷多个最优解的判别定理在线性规划的最优解中,某个非基变量对应的检验数为零,则线性规划有无数多最优解.定理3 无界解的判别定理设B 为线性规划的一个可行基,若基本可行解中s x 对应的检验数0σ<s ,且1-≤0s B p 则线性规划具有无界解(或称无解).某非基变量§3.4 单纯形表设B 为线性规划的一个基,x 为对应的可行解,则=Ax b两边同乘得1-B 11--=B Ax B b两边同乘得T Bc 11T T --=BBc B Ax c B b T z =c xTz -=c x 11T T --+-=TBBz c B Ax c x c B b 11(T T --+-=)TBBz c B A c x c B b1111()T TT z ----⎧+-=⎨=⎩BBc B A c x c B b B Ax B b 11111T T Tz ----⎡⎤⎡⎤-⎡⎤=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦0BBc B b c B A c x B A B b 定义矩阵1111TT----⎡⎤-⎢⎥⎣⎦T BBc B b c B A c B bB A 为基B 对应的单纯形表(table of simplex ),记为()T B1111()T T----⎡⎤-=⎢⎥⎣⎦T BBc B b c B A c T B B bB A 检验数函数值基变量的值各变量的系数100T b -=Bc B b 101020(,,,)--= T TBn c B A c b b b 10201-⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥ b b B b则单纯形表可写成000101011102()⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦B n n m m mn b b b b b b T b b b 1112121222111112(,,)---⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎣⎦n n n m m mn b b b b b b B A B p B p bb b上例中1212112max ..28400z x x s t x x x x x =-⎧⎪+≤⎪⎨≤⎪⎪≥≥⎩,标准化得:121231412max ..28400z x x s t x x x x x x x =-⎧⎪++=⎪⎨+=⎪⎪≥≥⎩,12341210(,,,)1001⎡⎤==⎢⎥⎣⎦A p p p p 子阵是否为基基变量非基变量基本解目标函数值134(,)=B p p 34,x x 12,x x (0,0,8,4)是231(,)=B p p 31,x x 24,x x (4,0,4,0)312(,)=B p p 12,x x 34,x x (4,2,0,0)424(,)=B p p 24,x x 13,x x (0,4,0,4)-4514(,)=B p p 14,x x 23,x x (8,0,0,4)-是是是是042基本可行解1x O(4,0)(4,2)(0,4)(8,0)2x 顶点13410(,)01⎡⎤==⎢⎥⎣⎦B p p 231(,)=B p p 12341210(,,,)1001⎡⎤==⎢⎥⎣⎦A p p p p T(0,0)=B C 10()T⎡⎤-=⎢⎥⎣⎦c T B b A 34011008121041001z x x -⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦23140101()4021141001x x ⎡⎤⎢⎥=-⎢⎥⎢⎥z T B 121101--⎡⎤=⎢⎥⎣⎦B 31401014021141001z x x ⎡⎤⎢⎥−−→-⎢⎥⎢⎥⎣⎦T(0,1)=B C单纯形表的特点:1、基变量对应的检验数为零2、基变量的系数构成单位阵§5旋转变换(基变换)设已知12(,,,,,)= r m j j j j B p p p p T()=B 1 r m j j j z x x x 1sn x x x 0001001011110102⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦sn s n r r rs rn m m ms mn b b b b b b b b b b b b b b b b为了将s x 变为基变量,而将r j x 变为非基变量,必须使表中的第s 列向量变为单位向量,变换按下列步骤进行:(1)将()T B 中第r 行,第s 列的元素化为1.01(,,,,,1,,) rj r rnr rs rs rs rsb b b b b b b b (2)将()T B 中第s 列的的其余元素化为0.0101(,,,,,0,,)---- is rn is rj is r is r i i ij in rs rs rs rsb b b b b b b b b b b b b b b b由此得出变换后矩阵中各元素的变换关系式如下,其中,01== ,,,rjrj rsb b j nb ,,01,01=-≠== ,,,,,,is rjij ij rsb b b b i r i m j nb 变换式称为旋转变换rs b 称为旋转元,r称为旋转行称为旋转列,s s x 称为入基变量,称为出基变量,r j x {,}r s定理3.5.1,01== ,,,rj rj rsb b j n b ,,0,01=-≠== ,,,,,is rj ij ij rsb b b b i r i m j n b 在变换之下,将基12(,,,,,)= r m j j j j B p p p p 的单纯形表变为基12(,,,,,)= m j s j j B p p p p 的单纯形表第6节单纯形法基本思路是:线性规划(通常是求最小值的形式)若有最优解,其必定在可行域(在相应几何空间中是一个凸多面体)的顶点达到,故从某一个顶点出发,沿着凸多面体的棱向另一顶点迭代,使得目标函数的值增加,经过有限次迭代,将达到最优解点.1.入基变量及出基变量的确定入基变量的确定由上面可知,目标函数用非基变量表示的形式为01n j jj m z z x σ=+=-∑若某检验数0j σ<则j x 的系数大于零,将j x 由零变为非零,目标函数值增大.所以,为了使的取值目标函数值增加,可以将某检验数0j σ<对应的非基变量j x 中的某个变为基变量.{}min 0j s j σ=<则s x 可选作为入基变量.即:在负检验数中,列标最小的检验数对应的非基变量入基.2.出基变量的确定在确定出基变量时应满足两个原则:(1)目标函数值不减;(2)保证新的基本解为基本可行解.0min 0,0i is is b b i m b θ⎧⎫=>≤≤⎨⎬⎩⎭min ,00i is is b r i b i m b θ⎧⎫==>≤≤⎨⎬⎩⎭,2 单纯形法设已知一个初始可行基及B T()B 基变量指标集合为{}1,,B m J j j = 非基变量的指标集合为{}1,2,,\N BJ n J =单纯形法若所有()00j N b j J ≥∈,则停止,最优解为0,1,,0,ij i j N x b i m x j J **⎧==⎪⎨=∈⎪⎩否则转(2).(1)最优性检验(2)选入基变量{}0min 0,j N s j b j J =<∈若()01~is b i m ≤=,则停止,(LP)无最优解,否则转(3)(3)选出基变量0min 0,0i is is b b i m b θ⎧⎫=>≤≤⎨⎬⎩⎭0min ,00i is is b r i b i m b θ⎧⎫==>≤≤⎨⎬⎩⎭,(4)作{},r s 旋转运算,01rj rj rsb b j n b == ,,,,,01,01is rj ij ij rsb b b b i r i m j n b =-≠== ,,,,,,得B 的单纯形表()()ijT B b =,以ij b 代替ij b ,转(1)例1 求线性规划问题的解解标准型为:121231425max 2328416.412,,,,0z x x x x x x x s t x x x x x x x =+++=⎧⎪+=⎪⎨+=⎪⎪≥12121212max 2328416.412,0z x x x x x s t x x x =++≤⎧⎪≤⎪⎨≤⎪⎪≥⎩12123142512345max 2328416.412,,,,0z x x x x x x x s t x x x x x x x =+++=⎧⎪+=⎪⎨+=⎪⎪≥⎩-20-381612121004001004001345z x x x 12345x x x x x 000⎤⎥⎥⎥⎥⎥⎥⎡⎢⎢⎢⎢⎢⎢0T()B =0345[,,]B p p p =00T()T c B bA ⎡⎤-=⎢⎥⎣⎦-20-381612121004001004001345z x x x 12345x x x x x 000⎤⎥⎥⎥⎥⎥⎥⎦⎡⎢⎢⎢⎢⎢⎢⎣0T()B =8/116/408-3441202101001/400400135z x x 12345x x x x x 01/20⎤⎥⎥⎥⎥⎥⎥⎡⎢⎢⎢⎢⎢⎢1/4-41x08-3441202101001/400400135z x x 12345x x x x x 01/20⎤⎥⎥⎥⎥⎥⎥⎦⎡⎢⎢⎢⎢⎢⎢⎣1/4-1x 4/212/40140244011/201001/40002-15z x 12345x x x x x 3/21/80⎤⎥⎥⎥⎥⎥⎥⎦⎡⎢⎢⎢⎢⎢⎢⎣1/8-1x 32x 1/2例2求线性规划问题的解解标准型为:121231425max 228416.412,,,,0z x x x x x x x s t x x x x x x x =+++=⎧⎪+=⎪⎨+=⎪⎪≥12121212max 228416.412,0z x x x x x s t x x x =++≤⎧⎪≤⎪⎨≤⎪⎪≥⎩12123142512345max 228416.412,,,,0z x x x x x x x s t x x x x x x x =+++=⎧⎪+=⎪⎨+=⎪⎪≥⎩-10-281612121004001004001345z x x x 12345x x x x x 000⎤⎥⎥⎥⎥⎥⎥⎡⎢⎢⎢⎢⎢⎢0T()B =0345[,,]B p p p =00T()T c B bA ⎡⎤-=⎢⎥⎣⎦-10-281612121004001004001345z x x x 12345x x x x x 000⎤⎥⎥⎥⎥⎥⎥⎦⎡⎢⎢⎢⎢⎢⎢⎣0T()B =8/116/404-2441202101001/400400135z x x 12345x x x x x 01/40⎤⎥⎥⎥⎥⎥⎥⎡⎢⎢⎢⎢⎢⎢1/4-41x0-2441202101001/400400135z x x 12345x x x x x 00⎤⎥⎥⎥⎥⎥⎥⎦⎡⎢⎢⎢⎢⎢⎢⎣1/4-1x 4/212/4080244011/201001/400015z x 12345x x x x x 100⎤⎥⎥⎥⎥⎥⎥⎦⎡⎢⎢⎢⎢⎢⎢⎣1/8-1x 32x 41/42-1/2080244011/201001/400015z x 12345x x x x x 100⎤⎥⎥⎥⎥⎥⎥⎦⎡⎢⎢⎢⎢⎢⎢⎣1/8-1x 2x 2T 0803280101/410101/2-004-12z 12345x x x x x 00⎤⎥⎥⎥⎥⎥⎥⎦⎡⎢⎢⎢⎢⎢⎢⎣01x 2x 42-1/25x 11212x k x k x =+12120,1,1k k k k ≤≤+=全部最优解为§7 两阶段法第二阶段从初始可行基开始,用单纯形法求解原问题.(LP )max ..(0)0T z c x s t Ax b b x ⎧=⎪=≥⎨⎪≥⎩(ALP )max ..0()T w s t z ⎧=-⎪-=⎪⎨+≥⎪⎪≥⎩00T e y c x A =b b x y x 第一阶段引入人工变量,构造辅助问题,求辅助问题的最优解,得出原问题的初始可行基及对应的基本可行解.(ALP)12112211112211121122222211212312max..0 ,,,,0mn nn nn nm m mn n m mn mw y y ys t z c x c x c xa x a x a x y ba x a x a x y ba x a x a x y bx x x x y y y=----⎧⎪----=⎪⎪++++=⎪++++=⎨⎪⎪++++=⎪⎪≥⎩,,,,,121111211112122122212000000100()010001m m m m i i i in i=1i i i n n n m m m mn b a a a c c c b a a a T B b a a a b a a a ===⎡⎤----⎢⎥⎢⎥---⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦∑∑∑∑。
经典极值问题在微积分中函数的极值问题就是最简单的最优化问题。
例1 :对边长为a 的正方形铁板,在四个角处剪去相等的正方形以制成方形无盖水槽,问如何剪法使水槽的容积最大?解:)*6()(*2()*2(*)2(*)*2(*2)(*)*2()(22=--=-+--='-=x a x a x a x x a x f xx a x f由此解得两个驻点:6221a x a x ==第一个驻点不合实际意义。
现在来判断第二个驻点是否为最大点04*86*24)6(*824)6(*)*2()*6(*2)(<-=-=''-=--+--=''a a aa f ax a x a x f∴6a x =是极值点,极值为:32722min a 6a *)6a *2a ()6a (f )x (f =-==1.构造辅助函数(称为拉格朗日函数) F=F(x,y,λ)=f(x,y)+λφ(x,y )其中λ为待定常数,称为拉格朗日乘数。
将原条件极值问题化为求三元函数F(x,y,λ)的无条件极值问题。
2.由无条件极值问题的极值必要条件,有 ∂F/∂x=0 ∂F/∂y=0 ∂F/∂λ=0解出可能的极值点(x,y )和乘数λ。
3.判别求出的(x,y )是否为极值点,通常由实际问题的实际意义判定。
例2 指派问题设有四项任务1B 、2B 、3B 、4B 派四个人1A 、2A 、3A 、4A 去完成。
每个人都可以承担四项任务中的任何一项,但所消耗的资金不同。
设i A 完成j B 所需资金为ij c 。
如何分配任务,使总支出最少?分析:设变量⎪⎩⎪⎨⎧=任务完成不指派,任务完成指派j j i ij B A B A x 0,1则总支出可表示为:ij i j ij x c S ∑∑===4141数学模型:ij i j ij x c S ∑∑===4141min∑===414,3,2,1,1..j iji xt s∑===414,3,2,1,1i ijj x{}4,3,2,1,,1,0=∈j i x ij求目标函数()21,x x f z =在可行域D 上的极小点,是在与可行域D 有交集的等值线中找出具有最小值的等值线。
线性规划原理
线性规划(linear programming)是一种数学建模方法,用于求解含有一组线性约束条件的最优化问题。
它的目标是找到使得线性目标函数取得最大(或最小)值的最优决策变量的组合。
线性规划的基本原理可以概括为以下几个步骤:
1. 建立数学模型:根据实际问题确定决策变量、约束条件和目标函数。
决策变量通常表示决策的选择或分配方案,约束条件指定了这些变量的取值范围或关系,目标函数则衡量了决策的优劣程度。
2. 确定可行解的集合:根据约束条件,找到满足所有条件的决策变量的取值范围。
这个集合被称为可行解集,其中的每个解都满足所有约束条件。
3. 确定最优解:通过在可行解集中搜索,找到使得目标函数取得最大(或最小)值的解。
这个解被称为最优解,它代表了在所有可行解中最优的决策方案。
4. 验证最优性:对于找到的最优解,需要验证它是否确实是最优的。
这可以通过检查满足条件的附加条件、使用灵敏度分析等方法来进行。
线性规划方法的关键在于将实际问题抽象为数学模型,并利用线性关系进行求解。
它在许多领域都有广泛的应用,如生产计
划、资源优化、供应链管理等。
通过线性规划,可以做出高效而优化的决策,达到最大化利益或最小化成本的目的。
最优化之基本概念第一章1.最优化问题的数学模型包含有三个要素:即变量(又称设计变量)、目标函数、约束条件。
(变量、目标函数、约束条件 (4)2.(最优化问题的三种表达形式……P5中)3.称为集约束,通常不作考虑,可认为目标函数的定义域。
一般有。
可行点(容许点):满足所有约束的点称为可行点或容许点。
可行域(容许集):全体可行点构成的集合称为可行域,也叫容许集,记为D。
(P5)4.最优点:在可行域内找到的点,使得目标函数值取得最优值。
最优值:目标函数值最优解:,但习惯上把本身称为最优解。
(P5底)5.处理最优化问题的3种方法:解析法、图解法、迭代法6.迭代算法:选取一个初始可行点,然后根据现有的信息确定本次迭代的一个搜索方向和适当的步长,从而得到一个新点。
搜索方向迭代步长下降算法:求有上升算法:求有(P9)7.收敛速度:衡量算好好坏的一个标准。
(P9底)具有超线性收敛或者二阶收敛的算法是较快速的算法。
(P10)8.计算终止的计算终止准则:无约束优化问题的三种计算终止准则:点距准则、函数下降量准则、梯度准则。
(P11)约束优化问题有各自的终止准则。
优化算法的基本迭代过程:(P11底)9.图解法:(P6)运用求解二位优化问题可行域:即约束集合(P6)等高线:在三维空间中,不同的c值得到不同的投影曲线。
没一条投影曲线对应一个c 值,称投影曲线为目标函数的等值线或者等高线。
(P7)10.组合优化问题举例:背包问题即0-1问题:P13 例1.9 需要设为二进制变量,表示装第i个物品。
旅行商问题(TSP):(P14)组合爆炸P15聚类问题:(P14)组合爆炸P1511.算法复杂性:算法对时间的复杂性T(n)和对空间的复杂性S(n)。
算法的时间复杂性:算法执行基本操作的次数算法的空间复杂性:算法执行期间占用的存储单位(P15)12.组合优化问题分类:根据算法的复杂性,可分为P类、 NP类、NP完全类。
P类问题:具有多项式实践求解算法NP类问题:未找到球最优解的多项式实践算法NP完全类问题:任何一个问题至今未发现有多项式算法;只要其中一个问题找到了多项式算法,那么其他所有问题均有多项式算法。