第四章齿轮机构解析
- 格式:ppt
- 大小:3.61 MB
- 文档页数:15


齿轮机构工作原理
齿轮机构是一种常用的传动机构,由两个或多个齿轮组成。
它的工作原理是利用齿轮的啮合传递动力和运动。
齿轮机构的传动方式主要有平面齿轮传动和立体齿轮传动两种。
平面齿轮传动是将两个平行轴或交叉轴上的齿轮通过啮合来传递动力和运动。
立体齿轮传动是将两个相交或同轴的齿轮通过啮合来传递动力和运动。
在齿轮机构中,一般将驱动轮称为主动轮,被驱动轮称为从动轮。
主动轮通常由电动机或手动操作来提供动力,从动轮则通过主动轮的转动来带动其他机械部件的运动。
齿轮的工作原理是利用其齿形的设计特点。
齿轮的齿顶、齿槽和齿侧都有一定的几何形状,在啮合时能够产生相互啮合的传动关系。
当主动轮转动时,其齿顶与从动轮的齿槽相啮合,通过齿顶和齿槽之间的啮合力矩传递动力和运动。
齿轮机构的传动比是由齿轮的模数、齿数和啮合方式决定的。
通过改变主动轮和从动轮的齿数或改变齿轮的模数,可以改变齿轮机构的传动比,实现不同的传动效果。
总的来说,齿轮机构工作原理是利用齿轮的啮合传递动力和运动,通过改变齿轮的参数可以调整传动比,实现不同的传动效果。
同时,齿轮机构还具有传递动力平稳、传动效率高和传动精度好等优点,被广泛应用于各种机械设备中。

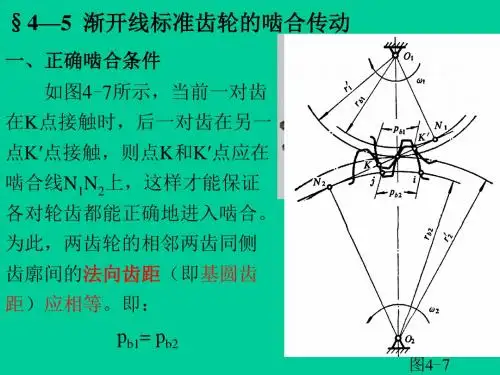
第4章 齿轮机构4.1考点提要4.1.1 重要的基本术语及概念齿廓啮合基本定律、共轭齿廓、渐开线性质和方程、渐开线齿轮啮合的可分性、齿轮的基本参数(模数,压力角,齿顶高系数,顶隙系数,齿数)、啮合线、啮合角、压力角、齿轮各部分名称及相互关系、标准齿轮的定义、齿轮的正确啮合条件,齿轮的连续平稳传动条件、重合度、根切、变位齿轮、标准安装、非标准安装、正确安装、当量齿轮。
4.1.2 标准直齿轮标准齿轮是指分度圆上有标准压力角和标准模数,齿顶高和齿根高符合标准且分度圆上齿厚等于齿槽宽的齿轮。
不同时具备这三个条件就不是标准齿轮。
要熟悉四个圆即齿顶圆,分度圆,齿根圆,基圆;三个弧长即齿距,齿厚,齿槽宽和三高即齿顶高,齿根高和全齿高。
熟悉相关的运算,牢记相应的算式。
对标准齿轮而言,我们定义齿厚和齿间相等的圆为定义标准参数的圆,即分度圆。
如果分度圆上齿距p ,齿数Z ,直径d ,则有:d pZ π= 或 Z p d π=可见:p/π是无理数。
以这样的数作为计算参数很不方便。
我们规定p/π的值为标准值(采用整数和有理数)并称之为模数。
从而使之成为齿轮的基本参数。
齿轮的另一个标准参数是分度圆上的压力角α,国家标准是20o ,从渐开线方程算式αcos r r b =可知:若压力角太小,虽能使传动省力,但分度圆和基圆就半径相差较小,齿形太直,齿根强度往往不够,若压力角太大,对传动不利,分度圆和基圆就半径相差较大,齿形太弯曲肥厚。
除上述参数外,齿顶高系数和齿顶隙系数也是不可少的。
前者规定了齿轮齿顶高与模数的关系h*a m ;后者使齿根高比齿顶高多一个与模数相关的值C*m ,从而使齿顶高和齿根高也成为标准值。
此外,齿数也是基本参数。
齿数变化则分度圆等四个圆的大小都变化。
但三个高和三个弧长都只和模数有关,不会随齿数而变化。
4.1.3内齿轮和齿条的特点(1)内齿轮的齿槽和轮齿分别相当于外齿轮的轮齿和齿槽(2)齿顶圆半径小于齿根圆半径(3)内齿轮的齿顶圆大于基圆4.1.4 齿条有以下特点:(1) 齿条齿廓为直线,齿廓上各点的压力角均为标准值,且等于齿条齿廓的倾斜角(齿形角)。
齿轮机构的工作原理
齿轮机构是一种常见的传动机构,由多个齿轮组成。
它的基本工作原理是利用不同大小齿轮之间的啮合关系来传递动力和运动,实现输入输出轴的转动。
在齿轮机构中,通常有一个驱动轴和一个被动轴。
驱动轴通过输入动力,使得驱动轴上的齿轮转动。
被动轴则通过与驱动轴上的齿轮啮合,使得被动轴上的齿轮产生与之相同方向或相反方向的转动。
根据齿轮之间的啮合方式和传动比例的不同,齿轮机构可以实现不同的速度和扭矩传递。
齿轮机构的传动原理主要有两种:平行轴传动和垂直轴传动。
在平行轴传动中,输入轴和输出轴的轴线平行,齿轮平行于轴线。
在垂直轴传动中,输入轴和输出轴的轴线垂直,齿轮垂直于轴线。
无论是平行轴传动还是垂直轴传动,齿轮机构的工作原理都是基于齿轮的啮合。
齿轮的传动比例由齿轮的齿数决定,常用公式为传动比=输出齿轮齿数/输入齿轮齿数。
传动比决定了输出
轴的转速和扭矩与输入轴的关系。
在实际应用中,齿轮机构常常根据具体需求设计出不同的结构形式,例如直齿轮、斜齿轮、锥齿轮等。
不同的齿轮结构具有不同的特点和适用范围。
齿轮机构广泛应用于各种机械设备中,如汽车传动、工程机械、工业生产线等领域。
通过合理设计和选择合适的齿轮,可以实现高效、可靠的动力传递和运动控制。
机械设计基础课件!齿轮机构H机械设计基础课件:齿轮机构一、引言齿轮机构是机械设计中应用最广泛的一种传动机构,其结构简单、传动效率高、可靠性好,广泛应用于各种机械设备中。
齿轮机构由齿轮副组成,包括齿轮、轴、轴承等零部件。
本课件将介绍齿轮机构的基本原理、分类、传动比计算、齿轮啮合条件、齿轮强度计算等内容。
二、齿轮机构的基本原理齿轮机构是利用齿轮的啮合来实现两轴之间的运动和动力传递的装置。
当两个齿轮啮合时,主动齿轮转动,通过齿轮啮合将动力传递给从动齿轮,从而实现运动的传递。
齿轮的啮合原理是基于齿廓曲线的几何关系,齿廓曲线是齿轮啮合的基础。
三、齿轮机构的分类齿轮机构根据齿轮的形状和布置方式可以分为多种类型,常见的有直齿轮机构、斜齿轮机构、蜗轮蜗杆机构等。
1.直齿轮机构:直齿轮机构是齿轮齿面与轴线垂直的齿轮机构,其传动平稳、噪音低,但承载能力相对较小。
2.斜齿轮机构:斜齿轮机构是齿轮齿面与轴线呈一定角度的齿轮机构,其传动效率高、承载能力强,但噪音相对较大。
3.蜗轮蜗杆机构:蜗轮蜗杆机构是利用蜗杆和蜗轮的啮合来实现传动的,其传动比大、传动平稳,但效率相对较低。
四、齿轮机构的传动比计算齿轮机构的传动比是指主动齿轮与从动齿轮转速的比值。
传动比的计算公式为:传动比=从动齿轮齿数/主动齿轮齿数在实际应用中,根据工作需求确定传动比,然后根据传动比选择合适的齿轮齿数,以满足设计要求。
五、齿轮啮合条件1.齿廓重合条件:齿轮啮合时,齿廓必须保持连续接触,避免齿廓间的冲击和滑动。
2.齿顶隙条件:齿轮啮合时,齿顶之间应保持一定的间隙,以避免齿顶干涉。
3.齿根隙条件:齿轮啮合时,齿根之间应保持一定的间隙,以避免齿根干涉。
4.齿侧隙条件:齿轮啮合时,齿侧之间应保持一定的间隙,以允许润滑油的进入和排出。
六、齿轮强度计算齿轮强度计算是齿轮设计的重要环节,主要包括齿面接触强度计算和齿根弯曲强度计算。
1.齿面接触强度计算:齿面接触强度计算是确定齿轮齿面接触应力是否满足材料屈服极限的要求。
适用标准机械设计根基知识点详解绪论、机器的特色:〔1〕它是人为的实物组合;〔2〕各实物间拥有确立的相对运动;〔3〕能取代或减少人类的劳动去达成有效的机械功或变换机械能。
第一章平面机构的自由度和速度剖析要求:握机构的自由度计算公式,理解的根基上掌握机构确立性运动的条件,娴熟掌握机构速度瞬心数的求法。
、根本观点运动副:凡两个构件直接接触而又能产生必定相对运动的联接称为运动副。
低副:两构件经过面接触构成的运动副称为低副。
高副:两构件经过点或线接触构成的运动副称为高副。
复合铰链:两个以上的构件同时在一处用展转副相联构成的展转副。
局部自由度:机构中常出现的一种与输出构件运动没关的自由度,称为局部自由度或剩余自由度。
虚拘束:对机构运动不起限制作用的重复拘束称为虚拘束或称悲观拘束。
瞬心:任一刚体相对另一刚体作平面运动时,其相对运动可看作是绕某一重合点的转动,该重合点称为刹时展转中心或速度瞬心,简称瞬心。
假如两个刚体都是运动的,那么其瞬心称为相对速度瞬心;假如两个刚体之一是静止的,那么其瞬心文档适用标准称为绝对速度瞬心。
、平面机构自由度计算作平面运动的自由构件拥有三个自由度,每个低副引入两个拘束,即便构件失掉两个自由度;每个高副引入一个拘束,使构件失掉一个自由度。
计算平面机构自由度的公式:F=3n-2PL-PH机构要拥有确立的运动,那么机构自由度数一定与机构的原动件数量相等。
即,机构拥有确立运动的条件是F>0,且F等于原动件个数。
、复合铰链、局部自由度和虚拘束(a)K个构件汇交而成的复合铰链应拥有(K-1)个展转副。
局部自由度固然不影响整个机构的运动,但滚子可使高副接触处的滑动摩擦变为转动摩擦,减少磨损,所以实质机械中常有局部自由度出现。
虚拘束对机构运动虽不起作用,可是能够增添构件的刚性和使构件受力均衡,所以实质机械中虚拘束随地可见。
、速度瞬心假如一个机构由K个构件构成,那么瞬心数量为N=K(K-1)/2瞬心地点的确定:双重合点相对速度方向,那么该两相对速度向量垂线的交点即是两构件的瞬心。