铰链四杆机构基本形式和特性
- 格式:ppt
- 大小:2.72 MB
- 文档页数:15
铰链四杆机构的基本类型
一、铰链四杆机构的基本类型
1、双铰链四杆机构
双铰链四杆机构是由四杆,两个铰铁,两个链轮或内和外球头节组成的机构,它具有结构简单,刚度大,调整方便等特点。
它能够在四杆围绕固定轴线上进行旋转,实现多自由度的旋转,同时它也可以作为偏转角度机构。
2、四轴铰链机构
四轴铰链机构也称为双弧四杆机构,它由杆,通用四轴两个铰铁,两个链轮或内和外球头节组成,它能够在四杆围绕同一轴线作出连续旋转,实现更多的自由度,还可以作为斜移角度机构。
3、铰链对称四杆机构
铰链对称四杆机构也称为对称四杆机构,它由小球头,四杆,两个铰铁,两个链轮或内外球头节组成,它能够在四杆围绕同一轴线作出连续旋转,实现更多的自由度,还可以作为斜移角机构。
4、相向四杆机构
相向四杆机构由四杆,两个单向装置(由铰铁链轮组成),两个链轮或内外球头节组成,它可以在四杆围绕同一轴线作出连续旋转,实现更多的自由度,同时它还可以作为斜移角度机构。
5、转动铰链四杆机构
转动铰链四杆机构由四杆,两个铰铁,两个链轮或内外球头节组成,它可以在四杆围绕不同的轴线作出连续旋转,实现更多的自由度,
还可以作为偏转角度机构。
二、铰链四杆机构的应用
1、铰链四杆机构可以用于单点拖动,它可以实现空间任意方向的连续运动,并可以解决物体受力方向不用的问题,是常用的拖动机构。
2、铰链四杆机构可以用于连续回转,它可以实现任意方向的回转,并且速度可以进行精确的控制,可以实现复杂的运动。
3、铰链四杆机构可以用于调整机构,它可以实现任意角度的偏转,可以调整物体在任意空间位置的偏转,是可以调整机构的常用机构。

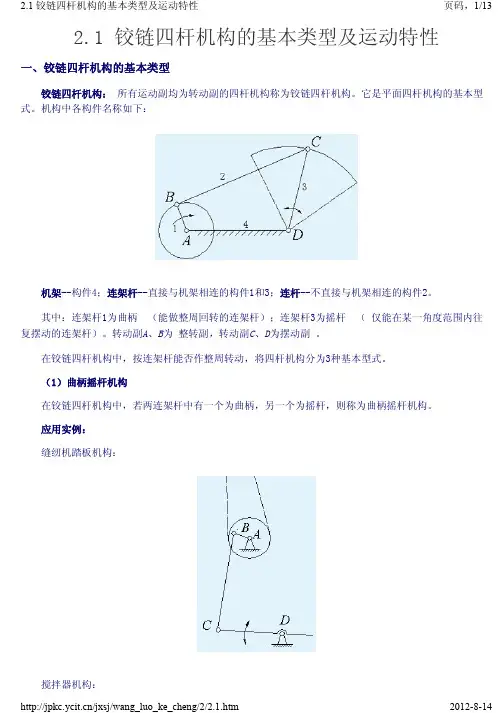
2.1 铰链四杆机构的基本类型及运动特性页码,1/132.1 铰链四杆机构的基本类型及运动特性一、铰链四杆机构的基本类型铰链四杆机构: 所有运动副均为转动副的四杆机构称为铰链四杆机构。
它是平面四杆机构的基本型 式。
机构中各构件名称如下:机架--构件4;连架杆--直接与机架相连的构件1和3;连杆--不直接与机架相连的构件2。
其中:连架杆1为曲柄 (能做整周回转的连架杆);连架杆3为摇杆 ( 仅能在某一角度范围内往 复摆动的连架杆)。
转动副A、B为 整转副,转动副C、D为摆动副 。
在铰链四杆机构中,按连架杆能否作整周转动,将四杆机构分为3种基本型式。
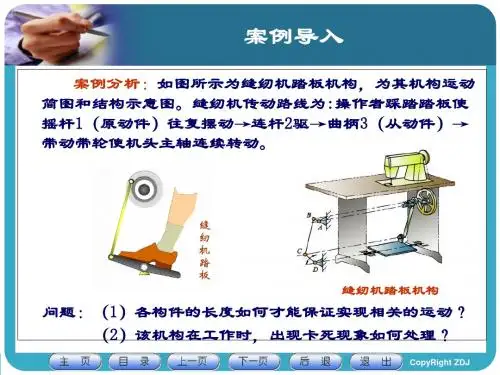
(1)曲柄摇杆机构 在铰链四杆机构中,若两连架杆中有一个为曲柄,另一个为摇杆,则称为曲柄摇杆机构。
应用实例: 缝纫机踏板机构:搅拌器机构: /jxsj/wang_luo_ke_cheng/2/2.1.htm2012-8-142.1 铰链四杆机构的基本类型及运动特性页码,2/13(2)双曲柄机构 在铰链四杆机构中,若两连架杆均为曲柄,称为双曲柄机构。
通常情况下,当主动曲柄连续等速转动时,从动曲柄一般不等速转动。
应用实例:惯性筛机构:两种特殊 的双曲柄机构:正平行四边形机构和反平行四边形机构 a.正平行四边形机构 在双曲柄机构中,若两对边构件长度相等且平行,则称为正平行四边形机构。
/jxsj/wang_luo_ke_cheng/2/2.1.htm2012-8-142.1 铰链四杆机构的基本类型及运动特性页码,3/13正平行四边形机构的两曲柄的转向不仅相同,而且转速相等。
正平行四边形机构有一个位置不确定问题 :如图示,当主动曲柄AB转到AB1位置时,从动曲柄有两种 运动可能,一种按原方向转动,一种反向转动。
解快方法: ①加惯性轮 利用惯性维持从动曲柄转向不变。
②加虚约束 通过虚约束保持平行四边形,如机车车轮联动的平行四边形机构。
b. 反平行四边形机构 两曲柄长度相同,而连杆与机架不平行的铰链四杆机构,称为反平行四边形机构。
铰链四杆机构类型
铰链式四杆机构类型
铰链式四杆机构是机械运动控制中比较常见的机构之一,可用于构造二维,三维的空间运动系统。
它是由四根节点可以移动的直线杆构成的,其中,两根杆之间是由铰链连接的,由它构成的空间运动系统可以实现四维以上的复杂运动。
常见的铰链四杆机构类型有:
一、四根杆构成的双平移铰链四杆机构:由四根杆组成,其中,两根杆是等长的,并且使其两端分别与移动平面的定位点相连,另外两根杆的长度可以不等,这样就可以构成一个双平移的铰链四杆机构。
二、梁铰链四杆机构:由四根杆构成的,其中,两根杆的长度可以不等,而两杆的中点分别与移动平面定位的点相连接,形成一个梁状的铰链四杆机构。
这种机构由于其结构简单,因此它可以用于构成一个简单的空间运动系统。
三、双曲线铰链四杆机构:由四根杆构成,其中,两根杆的长度可以不等,且两根杆中间的四个端点分别与移动平面定位的点相连,可以构成一个双曲线的铰链四杆机构,这种机构可以实现三维空间运动。
四、蝶形铰链四杆机构:由四根杆构成,其中,两根杆长度相等,且两根杆的中间的四个端点分别与移动平面定位的点相连,可以构成一个蝶形的铰链四杆机构,这种机构可以实现四维或更高维度的空间运动。
铰链四杆机构特点
铰链四杆机构特点
第一步:介绍铰链四杆机构
铰链四杆机构是一种驱动机构,它由蜗轮机构、滑块机构和铰链机构
三部分组成。
蜗轮机构由蜗轮及旋转的蜗轮轴直接与驱动机构连接,
这样就可以把驱动机构的动力传送到所驱动的设备上。
在蜗轮机构的
驱动轴的两端装有滑块,滑块机构中的滑块通过铰铦连接部件将动力
传送到旋转或转动工作部件上。
铰链机构则是滑块机构与旋转或转动
工作部件之间的连接部件,它能把滑块机构传送的动力带到所驱动的
工作部件上。
第二步:铰链四杆机构的特点
铰链四杆机构的结构简单,组装方便,具有较强的耐用性和可靠性。
首先,铰链四杆机构的安装要求不高。
其次,它耐用准确,不会因润
滑油变质而导致机构受损。
另外,它具有良好的动力传递性能,且具
有很高的动力传递效率。
此外,它还具有低噪音、低振动等特点。
第三步:铰链四杆机构的应用
由于其结构简单,组装方便,耐用性和可靠性高,因此铰链四杆机构
在工业生产中被广泛应用。
如它可以用于制造工业机械的拖动和定位,以及重型机器的驱动。
此外,它也是典型的多元机构之一,用于驱动
和控制非常复杂的工作任务的传动装置;应用于各种起重仓储设备;
在化工、石油、航空航天等行业中大量使用;并在许多机械设备中也有使用。
第四步:结论
以上是铰链四杆机构的特点,也就是它简单结构,容易组装,耐用准确,高效传动,低噪音、低振动等特点,在工业生产中得到了广泛应用。
这样,铰链四杆机构既提高了机构的运行性能,也满足了不同行业的不同需求。
铰链四杆机构的三种基本形式特点
铰链四杆机构的三种基本形式:曲柄摇杆机构、双曲柄机构、双摇杆机构。
所有运动
副均为转动副的四杆机构称为铰链四杆机构,它是平面四杆机构的基本形式,其他四杆机
构都可以看成是在它的基础上演化而来的。
1、曲柄摇杆机构的条件:连架杆之一为最短杆。
2、双曲柄机构的条件:机架为最长杆。
3、双摇杆机构的条件:连杆为最短杆。
铰链四杆机构中,按照连架杆与否可以搞整周旋转,可以将其分成三种基本形式,即
为曲柄摇杆机构,双曲柄机构和双摇杆机构。
所有运动副均为转动副的四杆机构称为铰链四杆机构,它是平面四杆机构的基本形式,其他四杆机构都可以看成是在它的基础上演化而来的。
选取其中一个构件做为机架之後,轻易与机架链接的构件称作连架杆,不轻易与机架
相连接的构件称作连杆,能搞整周调头的构件被称作曲柄,就可以在某一角度范围内往复
转动的构件称作摇杆。
如果以旋转副相连接的两个构件可以搞整周相对旋转,则称作整转副,反之称作摆转副。
铰链四杆机构基本类型的判别方法
关于铰链四杆机构基本类型的判别方法,我们可以在考虑杆的数目的同时,参照其各杆的相对长度以及拓扑结构进行分类与鉴别。
首先,我们将铰链四杆机构进行一种基本的分类,简单说来就是根据其构造形式可以将其分为循环铰链四杆机构,开链铰链四杆机构和闭链铰链四杆机构。
其中循环铰链四杆机构的特点是两个动杆之间存在虚拟中心,而开链铰链四杆机构一般由两个移动态和两个固定态构成,其特点是具有单一的输入和输出,闭链铰链四杆机构一般有一个固定杆、两个连杆和一个浮动杆组成,这种结构使得其在运动过程中具有很高的稳定性。
再者,铰链四杆机构的判别方法也可以通过凯尔特氏法则进行。
通过设定不同的动点,将机构转换为四边形,利用四边形对角线关系的性质,判断出四杆机构的类型。
凯尔特氏法则主要根据长杆和短杆与对角线作用的比例关系进行判定,使得人们能够更直观、便捷地了解到机构的状况。
此外,根据铰链四杆机构的六个不同的工作位置(即标准位置、罐筒位置、直排位置、倒排位置、异侧位置和同侧位置),也可进行进一步的判别。
例如,标准的循环链铰链四杆机构的工作位置是固定链接在两个最长链接之间。
以上,就是关于铰链四杆机构基本类型的判别方法的一些基本信息,需要注意的是,不同的判别方法适用于不同的情境,因此在实际操作过程中须结合具体情况进行选择。
铰链四杆机构类型铰链四杆机构类型一、常见的铰链四杆机构铰链四杆机构是一种以驱动活塞活动的机构,通过其上的铰链的存在,通过控制发动机的活塞活动,就可以达到控制活塞的运动,从而实现活塞的控制。
常见的铰链四杆机构有拉杆结构、曲臂结构、拉杆曲臂结构和蜗杆结构等。
1、拉杆结构拉杆结构的铰链四杆机构,主要是通过拉杆对活塞进行控制,并且控制的运动也是活塞的前后运动,其具有精度高、操作简单、可靠性强等特点,常用于实验室分析仪器和包装机、模具机等设备中。
2、曲臂结构曲臂结构的铰链四杆机构,主要是将四杆作为曲臂的形式,通过其形成的曲线上的活塞的运动,从而实现活塞的控制,其动作范围比较大,但是控制的准确性相对于拉杆结构会有所损失。
因此该结构通常用于大范围控制应用中,如工业控制、气动机等。
3、拉杆曲臂结构拉杆曲臂结构的铰链四杆机构,是将拉杆结构和曲臂结构相结合,形成的一种结构,它既可以控制活塞的前后运动,也可以控制活塞沿曲线运动,是拉杆结构和曲臂结构的一种结合,其具有控制动作范围大,可靠性高的特点。
4、蜗杆结构蜗杆结构的铰链四杆机构,主要是通过蜗杆的形成,连接四杆,从而实现活塞的控制,它可以同时满足活塞的前后运动和沿着曲线路径运动,其具有控制动作范围广,精确度高,可靠性强等特点。
二、铰链四杆机构的优点1、结构简单,操作简便,维护方便;2、控制精度高,可以实现稳定的速度变化;3、可以实现小型化、节能;4、可以实现曲线路径的快速控制;5、在恒定载荷下,可以满足较长的寿命要求。
三、铰链四杆机构的应用1、工业控制:铰链四杆机构可以用于工业自动控制系统,实现控制精度高、操作简便、可靠性强的控制。
2、机械包装机:铰链四杆机构可以实现高效的包装生产,提高了包装设备的生产效率。
3、模具机:铰链四杆机构可以控制模具机的运动,实现高效的生产加工。
4、实验室分析仪器:由于铰链四杆机构具有控制精度高、可靠性强等特点,可以实现实验室分析仪器的准确控制。
铰链四杆机构1)四根杆子的名称及特点机架——固定不动连杆——机架的对边杆曲柄——能整周转摇杆——不能整周转2)铰链四杆机构的三种基本类型曲柄摇杆机构、双曲柄机构、双摇杆机构3)曲柄存在的条件:a)最短杆与最长杆的长度之和小于或等于其余两杆长度之和;b)连架杆或机架中必有一是最短杆。
注意:1.上述两条件同时满足必有曲柄存在;2.满足其中一条件可能有曲柄存在;3.如有一条件不满足,肯定没有曲柄存在。
推论1:最短杆与最长杆的长度之和小于或等于其余两杆长度之和(1)连架杆最短——曲柄摇杆机构;(2)机架最短——双曲柄机构;(3)连杆最短——双摇杆机构。
推论2:最短杆与最长杆的长度之和大于其余两杆长度之和。
此条件不满足曲柄存在的条件,所以无论何杆最短均只能得到双摇杆机构。
曲柄摇杆机构在铰链四杆机构中,若两个连架杆,一为曲柄,另一个为摇杆,则此铰链四杆机构称为曲柄摇杆机构。
通常曲柄1为原动件,并作匀速转动;而摇杆3为从动件,作变速往复摆动。
1)曲柄摇杆机构的主要特性:a)急回运动曲柄摇杆机构中,曲柄AB在转动一周中,在B1、B2两次与连杆BC共线,相应铰链中心 A与C之间的距离AC1和AC2分别为最短和最长,摇杆CD的位置C1D和C2D分别为其左右极限位置。
摇杆在两极限位置间的夹角ψ,称为摇杆的摆角。
当曲柄由位置 AB1 顺时针转到位置AB2 时,曲柄转角ψ1=180°+θ,这时摇杆由左极限位置C1D 摆到位置右极限位置C2D,摆杆角度为ψ;而当曲柄顺时针再转过角度ψ2=180°-θ时,摇杆由位置C2D摆回至位置C1D,其摆角仍然是ψ 。
虽然摇杆来回摆动的摆角相同,但对应的曲柄转角不等(ψ1 > ψ2);当曲柄匀速转动时,对应的时间也不等(t 1> t 2)。
令摇杆自ClD摆至C2D为工作行程,这时铰链C的平均速度是 v1=C1C2 /tl 。
摇杆自C2D摆回至C1D是其空回行程,这时C点的平均速度是v2=C1C2 /t2,显然v1 < v2 ,它表明摇杆具有急回运动的特性。