铰链四杆机构基本形式和特性
- 格式:ppt
- 大小:2.55 MB
- 文档页数:32
铰链四杆机构的基本类型
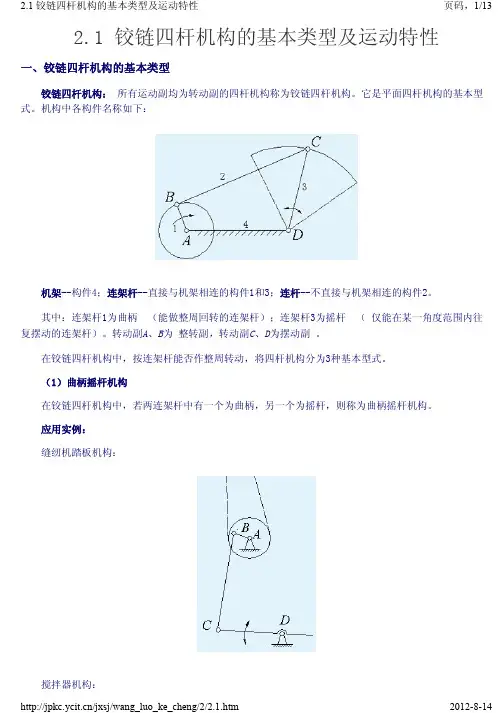
一、铰链四杆机构的基本类型
1、双铰链四杆机构
双铰链四杆机构是由四杆,两个铰铁,两个链轮或内和外球头节组成的机构,它具有结构简单,刚度大,调整方便等特点。
它能够在四杆围绕固定轴线上进行旋转,实现多自由度的旋转,同时它也可以作为偏转角度机构。
2、四轴铰链机构
四轴铰链机构也称为双弧四杆机构,它由杆,通用四轴两个铰铁,两个链轮或内和外球头节组成,它能够在四杆围绕同一轴线作出连续旋转,实现更多的自由度,还可以作为斜移角度机构。
3、铰链对称四杆机构
铰链对称四杆机构也称为对称四杆机构,它由小球头,四杆,两个铰铁,两个链轮或内外球头节组成,它能够在四杆围绕同一轴线作出连续旋转,实现更多的自由度,还可以作为斜移角机构。
4、相向四杆机构
相向四杆机构由四杆,两个单向装置(由铰铁链轮组成),两个链轮或内外球头节组成,它可以在四杆围绕同一轴线作出连续旋转,实现更多的自由度,同时它还可以作为斜移角度机构。
5、转动铰链四杆机构
转动铰链四杆机构由四杆,两个铰铁,两个链轮或内外球头节组成,它可以在四杆围绕不同的轴线作出连续旋转,实现更多的自由度,
还可以作为偏转角度机构。
二、铰链四杆机构的应用
1、铰链四杆机构可以用于单点拖动,它可以实现空间任意方向的连续运动,并可以解决物体受力方向不用的问题,是常用的拖动机构。
2、铰链四杆机构可以用于连续回转,它可以实现任意方向的回转,并且速度可以进行精确的控制,可以实现复杂的运动。
3、铰链四杆机构可以用于调整机构,它可以实现任意角度的偏转,可以调整物体在任意空间位置的偏转,是可以调整机构的常用机构。

平面铰链四杆机构分类一、引言平面铰链四杆机构是一种常见的机械传动结构,由四个杆件通过铰链连接而成。
它具有简单、可靠、刚性好等优点,在机械领域有着广泛的应用。
本文将对平面铰链四杆机构进行分类和分析,以期更好地了解和应用这一机构。
二、分类平面铰链四杆机构可以根据其杆件的链接关系和机构的运动方式进行分类。
2.1 根据杆件链接关系分类•对称四杆机构:四个杆件两两对称连接,形成一个对称的结构。
常见的具有对称结构的平面铰链四杆机构有平行四杆机构和梯形四杆机构。
•非对称四杆机构:四个杆件之间没有对称关系,形成一个非对称的结构。
常见的非对称平面铰链四杆机构有双曲线四杆机构和椭圆四杆机构。
2.2 根据机构的运动方式分类•旋转运动四杆机构:机构中至少有一个连杆可以绕铰链进行旋转运动。
例如,摇杆机构和滑块机构都属于旋转运动四杆机构。
•平动运动四杆机构:杆件只能以平动的方式运动,不能绕铰链进行旋转运动。
典型的平动运动四杆机构有单滑块机构和双滑块机构。
三、对称四杆机构3.1 平行四杆机构四杆机构中的两个杆件平行于彼此,并且与另外两个杆件相互垂直。
平行四杆机构有两组平行链接的杆件,因此具有对称的结构。
其机构特点是:•杆件a和b平行,杆件c和d平行;•杆件a和d通过铰链连接,形成了机构的链接框架;•杆件b和c通过其他的铰链连接。
3.2 梯形四杆机构四杆机构中的两个杆件不平行,而是呈现出梯形的形状。
梯形四杆机构同样具有对称结构,其机构特点是:•杆件a和b不平行,杆件c和d不平行;•杆件a和d通过铰链连接,形成了机构的链接框架;•杆件b和c通过其他的铰链连接。
四、非对称四杆机构4.1 双曲线四杆机构四杆机构中的杆件连接形成一个双曲线的形状,因此称为双曲线四杆机构。
其机构特点是:•杆件a和b彼此相交,杆件c和d彼此相交;•杆件a和d通过铰链连接,形成了机构的链接框架;•杆件b和c通过其他的铰链连接。
4.2 椭圆四杆机构四杆机构中的杆件连接形成一个椭圆的形状,因此称为椭圆四杆机构。
铰链四杆机构类型的判定一、引言铰链四杆机构是一种常见的机械传动装置,由四个杆件和若干个铰链连接而成。
它具有结构简单、运动自由度少等特点,被广泛应用于机械工程领域。
本文将深入探讨铰链四杆机构的类型判定方法。
二、铰链四杆机构的基本概念铰链四杆机构由四个杆件和若干个铰链连接而成。
其中,铰链是指两个杆件通过一个固定转动中心连接。
根据杆件之间的连接方式和运动特点,铰链四杆机构可以分为以下几种类型。
三、类型一:平面四杆机构平面四杆机构是指四个杆件都在同一个平面内运动的机构。
它的特点是运动自由度为1,即只能实现平面内的直线运动或旋转运动。
1. 平面四杆机构的判定条件•杆件数量:平面四杆机构由四个杆件构成。
•铰链数量:平面四杆机构至少有四个铰链连接杆件。
•运动自由度:平面四杆机构的运动自由度为1,即只能实现平面内的直线运动或旋转运动。
2. 平面四杆机构的实例•摇杆机构:由一对相互平行的摇杆和两个铰链连接构成。
常用于发动机的气门传动系统。
四、类型二:空间四杆机构空间四杆机构是指四个杆件不在同一个平面内运动的机构。
它的特点是运动自由度为3,即可以实现空间内的任意运动。
1. 空间四杆机构的判定条件•杆件数量:空间四杆机构由四个杆件构成。
•铰链数量:空间四杆机构至少有四个铰链连接杆件。
•运动自由度:空间四杆机构的运动自由度为3,即可以实现空间内的任意运动。
2. 空间四杆机构的实例•机械手臂:由多个杆件和铰链连接构成,用于工业生产线上的物料搬运和装配操作。
五、类型三:平面与空间结合的四杆机构平面与空间结合的四杆机构是指四个杆件中有部分在同一个平面内运动,有部分在不同平面内运动的机构。
1. 平面与空间结合的四杆机构的判定条件•杆件数量:平面与空间结合的四杆机构由四个杆件构成。
•铰链数量:平面与空间结合的四杆机构至少有四个铰链连接杆件。
•运动自由度:平面与空间结合的四杆机构的运动自由度为介于1和3之间,可以实现平面内的直线运动或旋转运动,同时还可以实现空间内的部分运动。