第一章光学系统的像差
- 格式:ppt
- 大小:591.00 KB
- 文档页数:81
球差[1](Spheri cal aberra tion)亦称球面像差。
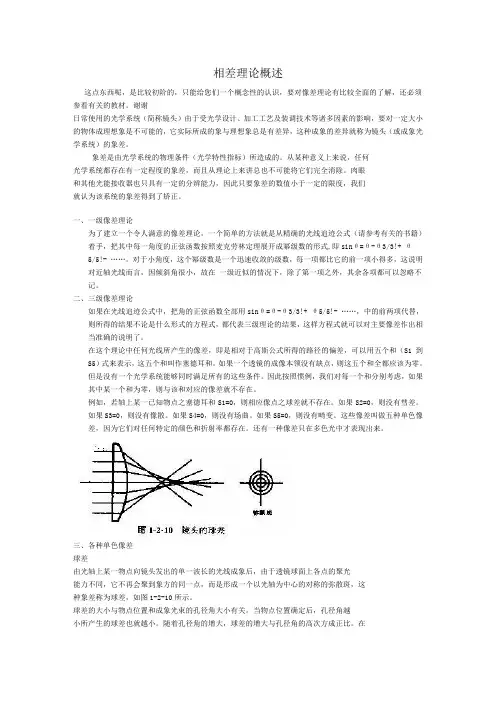
轴上物点发出的光束,经光学系统以后,与光轴夹不同角度的光线交光轴于不同位置,因此,在像面上形成一个圆形弥散斑,这就是球差。
一般是以实际光线在像方与光轴的交点相对于近轴光线与光轴交点(即高斯像点)的轴向距离来度量它。
对于单色光而言,球差是轴上点成像时唯一存在的像差。
轴外点成像时,存在许多种像差,球差只是其中的一种。
除特殊情况外,一般而言,单个球面透镜不能校正球差,正透镜产生负球差,负透镜产生正球差。
对一定位置的物点而言,当保持透镜的孔径和焦距不变时,球差的大小随透镜的形状而异。
因此,以适当形状的正、负透镜组合成的双透镜组或双胶合镜组是可能消球差的一种简单结构。
保持透镜的焦距不变而改变透镜形状,犹如把柔软的物体弯来弯去,故被称为透镜的整体弯曲,它是光学设计时校正像差的一种重要技巧。
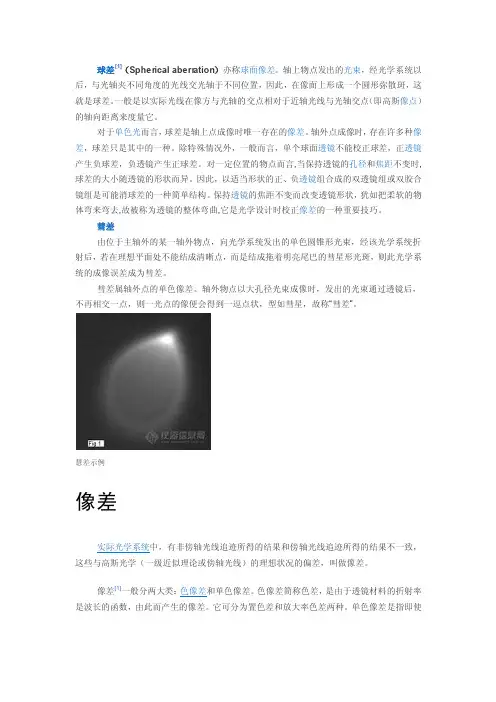
彗差由位于主轴外的某一轴外物点,向光学系统发出的单色圆锥形光束,经该光学系统折射后,若在理想平面处不能结成清晰点,而是结成拖着明亮尾巴的彗星形光斑,则此光学系统的成像误差成为彗差。
彗差属轴外点的单色像差。
轴外物点以大孔径光束成像时,发出的光束通过透镜后,不再相交一点,则一光点的像便会得到一逗点状,型如彗星,故称“彗差”。
慧差示例像差实际光学系统中,有非傍轴光线追迹所得的结果和傍轴光线追迹所得的结果不一致,这些与高斯光学(一级近似理论或傍轴光线)的理想状况的偏差,叫做像差。
像差[1]一般分两大类:色像差和单色像差。
色像差简称色差,是由于透镜材料的折射率是波长的函数,由此而产生的像差。
它可分为置色差和放大率色差两种。
单色像差是指即使彗差与物高一次方、入射光瞳口径二次方成正比的像差。
光学系统成像的像差的描述在光学系统中,成像的品质受到多种因素的影响,其中最主要的因素之一就是像差。
像差是指光学系统由于各种原因导致成像结果与理想成像结果的差异。
在实际应用中,我们需要尽可能减小像差,以获得清晰、准确的成像。
1.球差球差是由于光线通过透镜时,不同离轴位置的光线聚焦点与光轴上的光线聚焦点不一致而产生的像差。
球面透镜会使离轴光线聚焦于球心之前或之后,从而导致像差。
为了减小球差,可以采用非球面透镜或者多个球面透镜组合的方法。
2.色差色差是指不同波长的光线通过透镜后,其聚焦点位置不同所引起的像差。
由于光线的折射率随着波长的不同而变化,所以不同波长的光线在经过透镜后会有不同的折射效果,从而导致色差。
为了减小色差,可以采用消色差透镜、复合透镜等方法。
3.像散像散是指透镜或者光学系统在聚焦光线时,不同位置的光线聚焦点不在同一平面上而产生的像差。
像散分为径向像散和切向像散两种。
径向像散是指光轴上的光线与离轴光线在像平面上的聚焦点不一致,而切向像散则是指光轴上的光线与离轴光线在像平面上的聚焦点不在同一条直线上。
为了减小像散,可以采用适当的光学元件,如棱镜等。
4.畸变畸变是指光学系统在成像过程中,使得直线或者平面失真的现象。
畸变分为径向畸变和切向畸变两种。
径向畸变是指光线通过光学系统后,离轴的像点与光轴上的像点之间的距离不一致,而切向畸变则是指光线通过光学系统后,离轴的像点与光轴上的像点之间的位置关系不一致。
为了减小畸变,可以采用非球面透镜或者适当的校正方法。
5.散焦深度散焦深度是指光学系统在成像过程中,能够保持清晰成像的距离范围。
当物体与透镜或者光学系统的距离超出散焦深度时,成像会变得模糊不清。
散焦深度受到孔径大小和焦距的影响。
为了增加散焦深度,可以使用小孔径和长焦距的透镜。
光学系统成像的像差是由于光线经过透镜或者光学系统时,由于各种因素导致成像结果与理想成像结果的差异。
常见的像差包括球差、色差、像散、畸变和散焦深度等。
几何光学像差光学设计课程设计课程简介这是一门介绍几何光学像差和光学设计基础的课程。
在这门课程中,我们将学习像差的定义和分类,理解像差对图像质量的影响,并掌握光学设计的基本方法。
通过课堂讲解、实例分析和设计实践,我们将探索有效处理像差的各种方法和策略,为光学设计提供有价值的经验和方法。
课程内容第一章:像差和其分类课程的首个章节将介绍像差和其分类的基本概念。
我们将了解各种像差的定义、特点、计算方法和分类,并讨论在光学系统设计中如何处理不同种类的像差。
通过实例分析和课堂讲解,我们将协助学生理解像差对光学系统和图像品质的影响。
第二章:光学组件的独特质量在本章节中,我们将讨论光学组件的独特质量对像差的影响。
我们将探讨设计光学系统时考虑组件质量的原则和方法,包括选择适当的材料、依靠正确的加工方法降低表面形貌误差,以及通过光学涂层降低反射和散射等等。
第三章:光学系统设计基础在本章节中,我们将介绍光学系统设计的基础理论和方法。
我们将了解光学系统中不同组件的特性和作用,以及如何_design_加工和组装以获得的高品质的图像。
我们将以实例展示不同系统设计可能影响像差和图像品质的方式,给予学生在必要时独立设计系统的技能。
第四章:如何处理像差在本章营中,我们将讨论减少和处理各种像差的方法。
我们将介绍如何识别和评估像差,以及采用哪些材料、设计方案和加工方法达到减少像差的目的。
此外,我们将讨论像差校正和图像处理的原理和方法,为设计高品质图像提供有力支持。
课程实践在本门课程中,我们将针对具体问题实施许多设计实践,包括设计一个透镜、设计一个镜头组、识别和评估像差等等。
所有实践活动将采用自己动手实践的形式以激发学生的设计兴趣,巩固所学知识点并实践使用光学设计相关技术。
总结通过本门课程,学生将获得对几何光学像差、光学设计基础、光学组件质量、处理和校正像差的方法和策略等方面的深入了解。
此外,强调实践的课程培养学生掌握有效的实践技能和优化图像品质的重要能力。
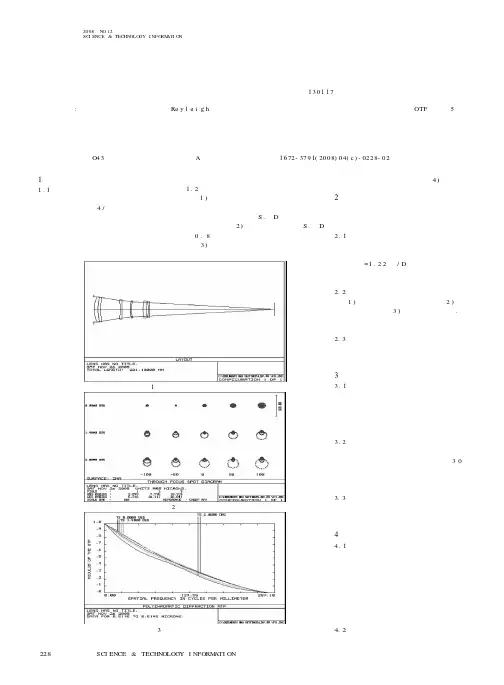
科技资讯科技资讯S I N &T NOLOGY I NFORM TI ON2008N O .12SC I ENCE &TEC HN OLO GY I NFO RM ATI O N学术论坛1瑞利判断和中心点亮度1.1瑞利判断定义:实际波面与参考球面波之间的最大波像差不超过4/λ时,此波面可看作是无缺陷的。
优点:便于实际应用缺点:不够严密。
适用范围:是一种较为严格的像质评价方法,适用于小像差光学系统。
1.2中心点亮度1)中心点亮度:光学系统存在像差时,其成像衍射斑的中心亮度和不存在像差时衍射斑的中心亮度之比S.D 来表示光学系统的成像质量。
2)斯托列尔准则:当S.D ≥0.8,认为光学系统的成像质量是完善的。
3)适用范围:是一种高质量的像质评价标准,适用于小像差光学系统。
4)缺点:计算相当复杂,很少作为计算评价方法使用。
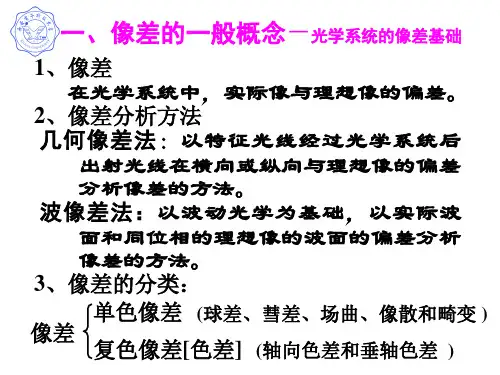
2分辨率分辨率反映光学系统分辨物体细节的能力,是一个很重要的指标参数,故也可用分辨率作为光学系统的成像质量评价方法。
2.1分辨率基本公式根据衍射理论,光学系统的最小分辨角为Δθ:Δθ=1.22λ/D对不同类型的光学系统,可由上式得到不同的表示形式。
2.2缺点1)只适用于大像差光学系统;2)与实际情况存在差异;3)存在伪分辨现象.故用分辨率来评价光学系统的成像质量也不是一种严格而可靠的评价方法。
2.3优点其指标单一,便于测量,在光学系统像质检测中得到广泛应用。
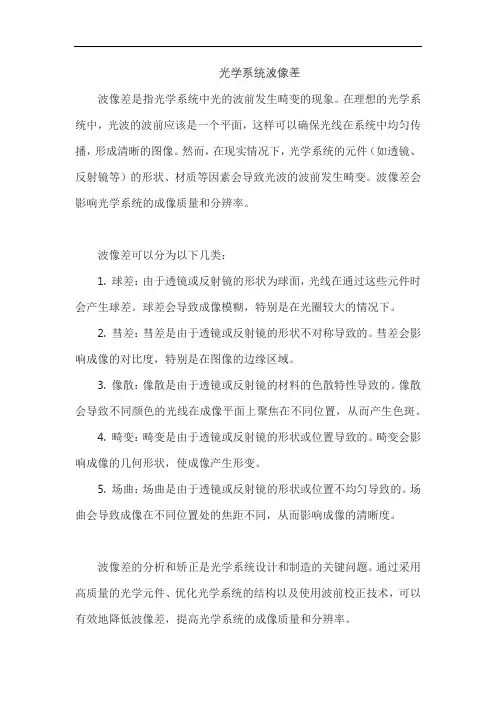
3点列图3.1点列图定义在几何光学的成像过程中,由一点发出的许多条光线经光学系统成像后,由于像差的存在,使其与像面的交点不再集中于一点,而是形成一个分布在一定范围内的弥散图形,称为点列图。
3.2适用范围适用于大像差光学系统。
照相物镜的像质评价:利用集中30%以上的点或光线所构成的图形区域作为其实际有效的弥散斑,弥散斑直径的倒数为系统的分辨率。
3.3优缺点优点:简便易行,形象直观。
缺点:工作量非常大,只有利用计算机才能实现。


光学光的相干与像差光学是研究光的传播和相互作用的科学,而在光学中,相干性和像差是两个重要的概念。
本文将就光学中光的相干性与像差进行讨论。
一、光的相干性光的相干性是指光波之间存在一定的相位关系,从而能够产生干涉和衍射现象。
相干性可分为时域相干性和空域相干性两种。
1. 时域相干性时域相干性描述了光波的波面沿时间的波动情况,常用的指标是相干时间和相干长度。
相干时间指的是光波保持相干的时间,而相干长度则是光波保持相干的传播距离。
在干涉与相干技术中,要求相干时间和相干长度足够大,以使得干涉条纹清晰可见。
2. 空域相干性空域相干性描述了光波的波前之间的相关性,即光波在空间上的相干程度。
常用的指标是相干面和相干长度。
相干面指的是在一定空间范围内,光波的波前保持相干的面积,而相干长度则是在单位波前面积上保持相干的传播距离。
在光学成像中,要求相干面和相干长度要足够小,以获得清晰的像。
二、光的像差像差是指在光学成像过程中,由于光学元件的制造或系统结构等原因导致的成像不良现象。
常见的像差可以分为球差、色差、像散等。
1. 球差球差是由于成像光线与透镜球面不完全垂直而引起的成像偏差。
球差会导致像点的位置随着视场位置的改变而发生变化,影响清晰度和分辨率。
2. 色差色差是指透镜不同波长的光折射率不同,导致不同波长的光线在透镜中聚焦点位置不同而引起的像差。
色差会导致不同颜色的光线无法同时聚焦,影响色彩还原能力。
3. 像散像散是指成像后光斑的位置与入射光的孔径和波长有关,导致像点的位置随着视场位置的改变而发生变化。
像散会导致像面失真,出现条纹等现象。
三、光学成像技术中的应用相干性和像差在光学成像技术中具有重要的应用价值。
1. 光学相干层析成像在医学领域,利用光学相干层析成像技术可以观测到组织的微小结构和病变情况。
该技术利用光波的相干性,通过对光的干涉测量,可以获得组织的三维分布信息,为医生提供了重要的辅助诊断手段。
2. 光学设计中的像差补偿在光学设计中,人们通过对透镜和光学系统的设计和优化,来尽量减小各种像差。
光学系统波像差
波像差是指光学系统中光的波前发生畸变的现象。
在理想的光学系统中,光波的波前应该是一个平面,这样可以确保光线在系统中均匀传播,形成清晰的图像。
然而,在现实情况下,光学系统的元件(如透镜、反射镜等)的形状、材质等因素会导致光波的波前发生畸变。
波像差会影响光学系统的成像质量和分辨率。
波像差可以分为以下几类:
1. 球差:由于透镜或反射镜的形状为球面,光线在通过这些元件时会产生球差。
球差会导致成像模糊,特别是在光圈较大的情况下。
2. 彗差:彗差是由于透镜或反射镜的形状不对称导致的。
彗差会影响成像的对比度,特别是在图像的边缘区域。
3. 像散:像散是由于透镜或反射镜的材料的色散特性导致的。
像散会导致不同颜色的光线在成像平面上聚焦在不同位置,从而产生色斑。
4. 畸变:畸变是由于透镜或反射镜的形状或位置导致的。
畸变会影响成像的几何形状,使成像产生形变。
5. 场曲:场曲是由于透镜或反射镜的形状或位置不均匀导致的。
场曲会导致成像在不同位置处的焦距不同,从而影响成像的清晰度。
波像差的分析和矫正是光学系统设计和制造的关键问题。
通过采用高质量的光学元件、优化光学系统的结构以及使用波前校正技术,可以有效地降低波像差,提高光学系统的成像质量和分辨率。
相差理论概述这点东西呢,是比较初阶的,只能给您们一个概念性的认识,要对像差理论有比较全面的了解,还必须参看有关的教材。
谢谢日常使用的光学系统(简称镜头)由于受光学设计、加工工艺及装调技术等诸多因素的影响,要对一定大小的物体成理想象是不可能的,它实际所成的象与理想象总是有差异,这种成象的差异就称为镜头(或成象光学系统)的象差。
象差是由光学系统的物理条件(光学特性指标)所造成的。
从某种意义上来说,任何光学系统都存在有一定程度的象差,而且从理论上来讲总也不可能将它们完全消除。
肉眼和其他光能接收器也只具有一定的分辨能力,因此只要象差的数值小于一定的限度,我们就认为该系统的象差得到了矫正。
一、一级像差理论为了建立一个令人满意的像差理论,一个简单的方法就是从精确的光线追迹公式(请参考有关的书籍)着手,把其中每一角度的正弦函数按照麦克劳林定理展开成幂级数的形式,即sinθ=θ-θ3/3!+ θ5/5!- ……。
对于小角度,这个幂级数是一个迅速收敛的级数,每一项都比它的前一项小得多,这说明对近轴光线而言,因倾斜角很小,故在一级近似的情况下,除了第一项之外,其余各项都可以忽略不记。
二、三级像差理论如果在光线追迹公式中,把角的正弦函数全部用sinθ=θ-θ3/3!+ θ5/5!- ……,中的前两项代替,则所得的结果不论是什么形式的方程式,都代表三级理论的结果,这样方程式就可以对主要像差作出相当准确的说明了。
在这个理论中任何光线所产生的像差,即是相对于高斯公式所得的路径的偏差,可以用五个和(S1到S5)式来表示,这五个和叫作塞德耳和。
如果一个透镜的成像本领没有缺点,则这五个和全都应该为零。
但是没有一个光学系统能够同时满足所有的这些条件。
因此按照惯例,我们对每一个和分别考虑,如果其中某一个和为零,则与该和对应的像差就不存在。
例如,若轴上某一已知物点之塞德耳和S1=0,则相应像点之球差就不存在。
如果S2=0,则没有彗差。
以下光学系统成像的像差的描述
以下是光学系统中常见的像差描述:
1.球差:由于光线在透镜不同位置通过时会发生不同的折射,导致焦距随着孔径的变化而变化,从而使成像位置产生偏移。
2.彗差:光线通过凸透镜时,边缘的像点会比中央的像点更靠近透镜的轴线,导致成像位置不准确。
3.色差:由于不同波长的光线在透镜中的折射率不同,导致不同颜色的光线聚焦位置不同,从而产生颜色的像差。
4.畸变:透镜或镜面的形状不完美,导致成像时会出现图像的畸变,如桶形畸变和枕形畸变等。
5.像散:由于光线经过透镜时的色散效应,不同波长的光线在成像平面上产生不同的焦点位置。
6.像场弯曲:不同位置的光线在透镜中会有不同的折射角度,从而导致成像平面上的像点不在同一平面上。
7.像散(球差散):由于透镜球面折射的不均匀性,不同孔径处的像点在成像平面上会呈现散焦状态。
8.辐散:成像平面上的像点的直径会在离轴处发生扩散,导致成像质量下降。
9.像场曲率:成像平面上不同位置对应的焦距不同,导致图像在边缘处出现失真。
以上是常见的光学系统成像的像差的描述,不同像差的影响程度和解决方法也不同,工程师需要根据具体情况进行优化和校正。
像差像差(全称色像差, aberration)是指实际光学系统中,由非近轴光线追迹所得的结果和近轴光线追迹所得的结果不一致,与高斯光学(一级近似理论或近轴光线)的理想状况的偏差。
像差主要分为球差、彗差、场曲、像散、畸变、色差以及波像差。
词条对上述像差进行了详细的介绍。
1像差简介像差一般分两大类:色像差和单色像差。
色像差简称色差,是由于透镜材料的折射率是波长的函数,由此而产生的像差。
它可分为位置色差和放大率色差两种。
单色像差是指即使在高度单色光时也会产生的像差,按产生的效果,又分成使像模糊和使像变形两类。
前一类有球面像差、彗形像差和像散。
后一类有像场弯曲和畸变。
实际工作中光学系统所成的像与近轴光学(Paraxial Optics,高斯光学)所获得的结果不同,有一定的偏离,光学成像相对近轴成像的偏离称像差。
由于像差使成像与原物形状产生差异。
复色光引起的色像差简称色差;非近轴单色光则引起单色像差。
初级像差又分为五种,分别为:球面像差、彗形像差、像散、像场弯曲和畸变五种。
摄影影头因制作不精密,或人为的损害,不能将一点所发出的所有光线聚焦于底片感光膜上的同一位置,使影像变形,或失焦模糊不清。
实际的光学系统存在着各种像差。
一个物点所成的像是综合各种像差的结果;此外实际光学系统完全可以不调焦在理想像平面处,这时像差(指在这个实像面上的像斑)当然也要变化。
在天文上常用光线追迹的点列图来表示实际像差;也可用波像差来表示像差,由一个物点发出的光波是球面波,经过光学系统后,波面一般就不再是球面的。
它与某一个基准点为中心的球面的偏离量,乘以该处介质的折射率值,称为波像差。
赛德尔的五像差[1]1856年德国的赛德尔,分析出五种镜头像差源之于单一色(单一波长)。
此称为赛德尔五像差。
2球差在共轴球面系统中,轴上点和轴外点有不同的像差,轴上点因处于轴对称位置,具有最简单的像差形式。
当轴上物点的物距L确定,并以宽光束孔径成像时,其像方截距随孔径角U(或孔径高度h)的变化而变化,因此轴上物点发出的具有一定孔径的同心光束,经光学系统成像后不复为同心光束。