MOOG公司东汽风机FD77C变桨系统培训附件PitchSystemPresentation资料
- 格式:ppt
- 大小:3.84 MB
- 文档页数:20
变桨系统维护华锐风电科技有限公司风力发电机组培训教材变桨部分1.变桨控制系统简介变桨控制系统包括三个主要部件,驱动装置-电机,齿轮箱和变桨轴承。
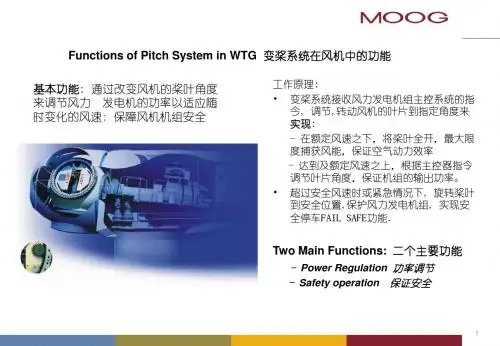
从额定功率起,通过控制系统将叶片以精细的变桨角度向顺桨方向转动,实现风机的功率控制。
如果一个驱动器发生故障,另两个驱动器可以安全地使风机停机。
变桨控制系统是通过改变叶片迎角,实现功率变化来进行调节的。
通过在叶片和轮毂之间安装的变桨驱动电机带动回转轴承转动从而改变叶片迎角,由此控制叶片的升力,以达到控制作用在风轮叶片上的扭矩和功率的目的。
在90度迎角时是叶片的工作位置。
在风力发电机组正常运行时,叶片向小迎角方向变化而达到限制功率。
一般变桨角度范围为0~86度。
采用变桨矩调节,风机的启动性好、刹车机构简单,叶片顺桨后风轮转速可以逐渐下降、额定点以前的功率输出饱满、额定点以的输出功率平滑、风轮叶根承受的动、静载荷小。
变桨系统作为基本制动系统,可以在额定功率范围内对风机速度进行控制。
变桨控制系统有四个主要任务:1. 通过调整叶片角把风机的电力速度控制在规定风速之上的一个恒定速度。
2. 当安全链被打开时,使用转子作为空气动力制动装置把叶子转回到羽状位置(安全运行)。
3. 调整叶片角以规定的最低风速从风中获得适当的电力。
4. 通过衰减风转交互作用引起的震动使风机上的机械载荷极小化。
2.变桨轴承2.1安装位置变桨轴承安装在轮毂上,通过外圈螺栓把紧。
其内齿圈与变桨驱动装置啮合运动,并与叶片联接2.2工作原理当风向发生变化时,通过变桨驱动电机带动变桨轴承转动从而改变叶片对风向地迎角,使叶片保持最佳的迎风状态,由此控制叶片的升力,以达到控制作用在叶片上的扭矩和功率的目的。
2.3变桨轴承的剖面图从剖面图可以看出,变桨轴承采用深沟球轴承深沟球轴承主要承受纯径向载荷,也可承受轴向载荷。
承受纯径向载荷时,接触角为零。
位置1:变桨轴承外圈螺栓孔,与轮毂联接。
位置2:变桨轴承内圈螺栓孔,与叶片联接。
主要内容1、供电回路充电器供电主控提供400VAC经滑环后给变桨控制系统,变桨主控柜经A插头分别给三个轴箱提供400VAC;经F插头分别给三个轴提供230VAC;提供充电器供电电源;提供插座电源。
充电器传感器,实时监控电池箱内的温度,并进行温度补偿充电器对三个电池箱循环充电充电器对电池电压进行电压低于190VDC,或高于252VDC时,输出故障信号,辅助触点断开。
后备电池直流控制回路后备电池通过M插头分别给轴箱供电限位开关起到启动刹车的作用风机出现故障时为变桨电机提供备用电源进行紧急顺桨。
每节蓄电池12V7.2Ah,一组6节,每个电池柜有3组共18节。
总电压为216VDC。
RS485通讯模块24V电源模块PLC发出的脉冲信号当PLC故障或监控到PLC发出分流电阻直流变三相滤波器电流互感器,测量电机电流,输出为4-20MA模拟量信号。
直流驱动器直流变桨电机控制柜中的24V信号经G插头的3脚到三个轴箱,使轴箱中的继电器4K1线圈闭合得电,使主接触器4K2线圈得电,驱动器使能信号OK,正常变桨。
触发驱动器的使能信号主接触器正常变桨刹车接触器3S后5K1线圈失电断开。
电池开关低电压穿越设置功能为过/欠压检测、相序检测。
过电压设置:480 表示电网电压大于480VAC设定值时,输出过压报警信号,辅助触点断开,F1指示灯亮。
欠电压设置:320 表示电网电压小于320VAC设定值时,输出过压报警信号,辅助触点断开,F2指示灯亮。
相序设置:15%表示相与相之间电压差不能60V,当超过60V时,输出报警信号。
三相电网电压监控继电器输出触点,当此信号的24VDC断开的时候,断电延时继电器延时3S后线圈失电。
断电延时继电器,低电压穿越回路91°限位开关95°限位开关3S后断开电枢三相主电源后备电池电源速度设定0~+/-10VRS485通讯速度反馈夹紧法兰轴/电枢转子电机加热电机风扇电机测速电机刹车机械复位编码器接口PLC I/O模块在“GEL In”在“Position”选项下可以设定变桨的目标角度值,在。
1.5MW风电机组变桨系统知识培训风电机组根据外部环境的不同被定义为 “常温型风机”和“低温型风机”等不同的机型,变桨系统要能满足相应机组的运行环境条件。
SSB变桨系统应用培训。
一、功能描述变桨系统的所有部件都安装在轮毂上。
风机正常运行时所有部件都随轮毂以一定的速度旋转。
变桨系统的作用是控制风机叶片旋转到设定的角度。
变桨系统通过控制叶片的角度来控制风轮的转速,进而控制风机的输出功率,并能够通过空气动力制动的方式使风机安全停机。
风机的叶片(根部)通过变桨轴承与轮毂相连,每个叶片都要有自己的相对独立的电控同步的变桨驱动系统。
变桨驱动系统通过一个小齿轮与变桨轴承内齿啮合联动。
风机正常运行期间,当风速超过机组额定风速时(风速在12m/s 到25m/s之间时),为了控制功率输出变桨角度限定在0度到30度之间(变桨角度根据风速的变化进行自动调整),通过控制叶片的角度使风轮的转速保持恒定。
任何情况引起的停机都会使叶片顺桨到90度位置(执行紧急顺桨命令时叶片会顺桨到91度限位位置)。
变桨系统有时需要由备用电池供电进行变桨操作(比如变桨系统的主电源供电失效后),因此变桨系统必须配备备用电池以确保机组发生严重故障或重大事故的情况下可以安全停机(叶片顺桨到91度限位位置)。
此外还需要一个冗余限位开关(用于95度限位),在主限位开关(用于91度限位)失效时确保变桨电机的安全制动。
由于机组故障或其他原因而导致备用电源长期没有使用时,风机主控就需要检查备用电池的状态和备用电池供电变桨操作功能的正常性。
每个变桨驱动系统都配有一个绝对值编码器安装在电机的非驱动端(电机尾部),还配有一个冗余的绝对值编码器安装在叶片根部变桨轴承内齿旁,它通过一个小齿轮与变桨轴承内齿啮合联动记录变桨角度。
风机主控接收所有编码器的信号,而变桨系统只应用电机尾部编码器的信号,只有当电机尾部编码器失效时风机主控才会控制变桨系统应用冗余编码器的信号。
二、主要部件组成电控箱 1套(数个) 变桨电机(配有变桨系统主编码器:A编码器) 3套备用电池 3套机械式限位开关 3套(6个) 限位开关支架及相关连接件 3套冗余编码器:B编码器 3套冗余编码器支架、测量小齿轮及相关连接件 3套各部件间的连接电缆及电缆连接器 1套技术文档 1套三、变桨系统各部件的连接框图图1:各部件间连接框图四、系统配置变桨中央控制箱执行轮毂内的轴控箱和位于机舱内的机舱控制柜之间的连接工作。
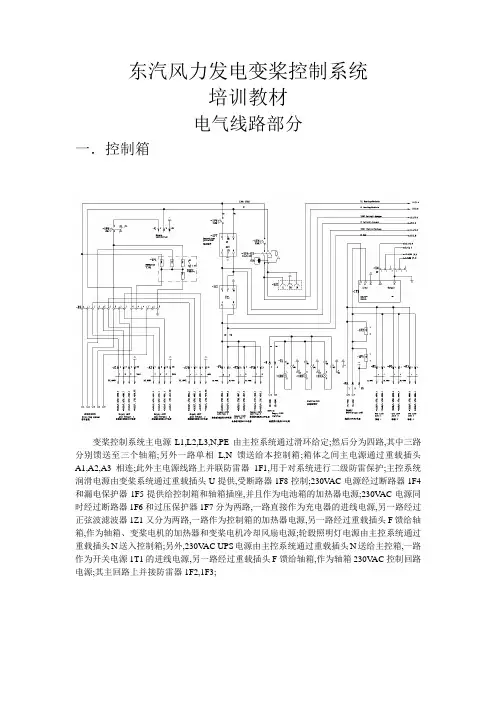
东汽风力发电变桨控制系统培训教材电气线路部分一.控制箱变桨控制系统主电源L1,L2,L3,N,PE由主控系统通过滑环给定;然后分为四路,其中三路分别馈送至三个轴箱;另外一路单相L,N馈送给本控制箱;箱体之间主电源通过重载插头A1,A2,A3相连;此外主电源线路上并联防雷器1F1,用于对系统进行二级防雷保护;主控系统润滑电源由变桨系统通过重载插头U提供,受断路器1F8控制;230V AC电源经过断路器1F4和漏电保护器1F5提供给控制箱和轴箱插座,并且作为电池箱的加热器电源;230V AC电源同时经过断路器1F6和过压保护器1F7分为两路,一路直接作为充电器的进线电源,另一路经过正弦波滤波器1Z1又分为两路,一路作为控制箱的加热器电源,另一路经过重载插头F馈给轴箱,作为轴箱、变桨电机的加热器和变桨电机冷却风扇电源;轮毂照明灯电源由主控系统通过重载插头N送入控制箱;另外,230V AC UPS电源由主控系统通过重载插头N送给主控箱,一路作为开关电源1T1的进线电源,另一路经过重载插头F馈给轴箱,作为轴箱230V AC控制回路电源;其主回路上并接防雷器1F2,1F3;主控与变桨系统之间通过O重载插头连接,互相传输信号;其中有过压保护器2F1,2F2,2F3,2F4,2F5隔离作为信号保护;2F1:1-3 变桨系统轴箱主回路热继电器过流或电机温度超过一定值时送给主控系统的信号;2F1:2-4 变桨系统充电回路及充电器故障时反馈给主控的信号;2F2:1-3 来自主控系统的变桨运行条件信号;2F4:1-3与2F2:2-4 所有桨叶位置到达91°时的反馈信号;2F3:2-4 来自主控的旁路顺桨位置的限位开关信号;充电器3A1通过断路器3F1分别给三个电池箱充电,三个电池箱充电分别由三个接触器3K1,3K2,3K3控制;此三个接触器由PLC每隔15min根据充电电压随电池箱温度变化循环给定信号吸合充电;同时电池检测回路信号和过/欠电压检测回路信号传送给PLC;温度监控器3A2,3A3,3A4判断来自电池箱PT100的温度信号,决定是否给电池箱加热;变桨系统PLC与主控采用RS485通讯模式;通过过压保护器4F1和重载插头P相连接;变桨电机运行之前先要松开电机刹车,此三个电机的刹车由PLC通过继电器10K1,10K2,10K3进行控制;驱动器与主控系统之间的通讯通过重载插头E和P,中间串接过压保护器4F1; 二.轴箱三相400V AC主电源通过重载插头A由控制箱送入轴箱,其间受主开关1Q1和断路器1F1控制;电机驱动器1A1把三相400V AC电源整流成可变直流电,从而达到驱动变桨直流电机的目的;三相400V AC电源通过三相滤波器1A2送入驱动器,在通电开始时需经过电阻1R2,1R3,1R4,然后迅速切换为从旁路接触器4K4经过;电池电源经过熔断器1F4,1F3送入驱动器,其间受接触器5K1控制;当主回路电源有故障时,将由电池电源供电,时间持续3s;若此时间中故障未除,电池电源将从接触器6K1经过直接驱动直流电机收桨;接触器4K2控制驱动器正常运行输出主回路;电流互感器1P1测量输出回路的电流,并转换为4-20mA信号送给PLC;正常运行输出主回路需串联一单相电抗器1L2;后备电池驱动电机时电枢绕组需并联一分流电阻1R1;轴箱后备电池供电电源由电池箱通过重载插头M连接,受负荷开关4Q1控制;继电器4K1得电是轴箱运行的先决条件,控制4K1的信号是通过重载插头G来自于主控的,当正常运转时,信号经过继电器6K3辅助触头给定;当处于顺桨状态时,信号经过二极管4V1给定;驱动器启动信号RFG由PLC通过重载插头G给定,中间受继电器4K1和接触器4K2控制;刹车接触器由PLC通过重载插头F控制;驱动器输出接触器4K2由4K1控制,并且与电池运行接触器6K1互锁;旁路切换接触器4K4由驱动器通过控制继电器5K4而实现控制;当系统电源有故障时,断电延时继电器5K2延时3s动作,在此3s中,电池电压供给直流驱动器的接触器5K1继续吸合,如3s后系统电源仍未恢复正常,则5K1断开;电机由后备电池通过接触器6K1直接供电;电机过热保护继电器5A1接受来自电机PTC150的温度信号,经过判定以开关量的形式给PLC发送信号,热过载继电器1F2的动作信号发送给主控系统;400V AC电源电压通过断路器6F1经过变压器6T1变为230V AC,再经过整流器6A1转换为200VDC供给电机刹车;另外并联一浪涌抑制器6A2,用于防止线路中的尖峰脉冲;当正常回路发生故障时,将由后备电池对刹车接触器6K2供电,在此基础上,才能接通后备电池对电机回路接触器6K1的供电;电池电压监视器7A1监视后备电池的电压大小,当低于设定值时,发送一开关量信号给PLC;三.电池箱充电器依据充电温度传感器检测到的电池箱温度对电池进行充电;充电回路由重载插头B 进入电池箱,放电回路经重载插头M连接到轴箱;PT100检测到的温度作为加热器1R1,1R2是否通电工作的依据;。