逐点比较法象限处理共48页
- 格式:ppt
- 大小:8.73 MB
- 文档页数:48

第二节逐点比较法插补(数控基础第三章插补计算原理、刀具半径补偿与速度控制)发布:2009-7-19 19:24 | 作者:唐义| 来源:本站| 查看:6次| 字号: 小中大逐点比较法的基本原理是被控对象在按要求的轨迹运动时,每走一步都要与规定的轨迹进行比较,由此结果决定下一步移动的方向。
逐点比较法既可以作直线插补又可以作圆弧插补。
这种算法的特点是,运算直观,插补误差小于一个脉冲当量,输出脉冲均匀,而且输出脉冲的速度变化小,调节方便,因此在两坐标数控机床中应用较为普遍。
一、逐点比较法直线插补1.逐点比较法的直线插补原理在图3-1所示平面第一象限内有直线段以原点为起点,以为终点,直线方程为:改写为:如果加工轨迹脱离直线,则轨迹点的、坐标不满足上述直线方程。
在第一象限中,对位于直线上方的点,则有:对位于直线下方的点B,则有:因此可以取判别函数来判断点与直线的相对位置,为当加工点落在直线上时,;当加工点落在直线上方时,;当加工点落在直线下方时,。
我们称为“直线插补偏差判别式”或“偏差判别函数”,的数值称为“偏差”。
例如图3-2待加工直线,我们运用下述法则,根据偏差判别式,求得图中近似直线(由折线组成)。
若刀具加工点的位置处在直线上方(包括在直线上),即满足≥0时向轴方向发出一个正向运动的进给脉冲(),使刀具沿轴坐标动一步(一个脉冲当量δ),逼近直线;若刀具加工点的位置处在直线下方,即满足<0时,向轴发出一个正向运动的进给脉冲(),使刀具沿轴移动一步逼近直线。
但是按照上述法则进行运算判别,要求每次进行判别式运算——乘法与减法运算,这在具体电路或程序中实现不是最方便的。
一个简便的方法是:每走一步到新加工点,加工偏差用前一点的加工偏差递推出来, 这种方法称“递推法”。
若≥0时,则向轴发出一进给脉冲,刀具从这点向方向迈进一步,新加工点的偏差值为根据式(3-1)及式(3-2)可以看出,新加工点的偏差值完全可以用前一点的偏差递推出来。
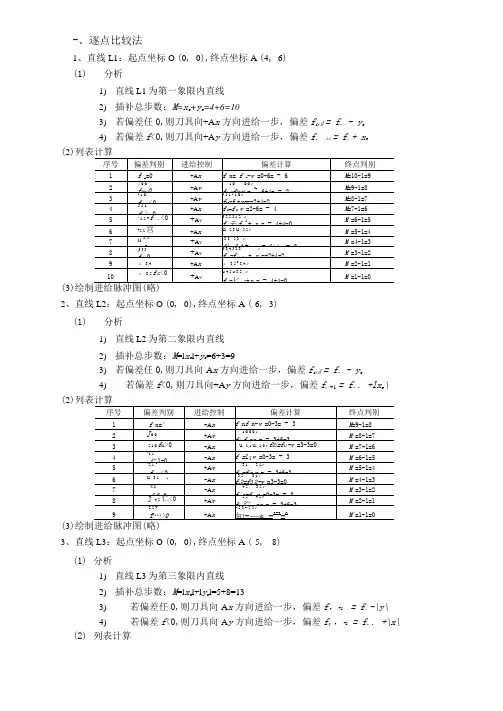
-、逐点比较法1、直线L1:起点坐标O (0, 0),终点坐标A (4, 6)(1)分析1)直线L1为第一象限内直线2)插补总步数:M=x e+y e=4+6=103)若偏差任0,则刀具向+A x方向进给一步,偏差f i+1j = f.. - y e4)若偏差f<0,则刀具向+A y方向进给一步,偏差f. .+1= f.. + x e(2)列表计算(3)2、直线L2:起点坐标O (0, 0),终点坐标A (-6, 3)(1)分析1)直线L2为第二象限内直线2)插补总步数:M=l x e l+y e=6+3=93)若偏差任0,则刀具向-A x方向进给一步,偏差f i+1j = f.. - y e4)若偏差f<0,则刀具向+A y方向进给一步,偏差f, .+1= f.. +lx e\ (2)(3)3、直线L3:起点坐标O (0, 0),终点坐标A (-5, -8)(1)分析1)直线L3为第三象限内直线2)插补总步数:M=l x e l+l y e l=5+8=133)若偏差任0,则刀具向-A x方向进给一步,偏差f,+1. = f.. -\y\4)若偏差f<0,则刀具向-A y方向进给一步,偏差f,,+1 = f.. +\x\(2)列表计算(3)绘制进给脉冲图(略)4、直线L4:起点坐标O (0, 0),终点坐标A (7, -4)(1)分析1)直线L4为第四象限内直线2)插补总步数:M=x+\y\=7+4=113)若偏差任0,则刀具向+A x方向进给一步,偏差f i+1j = f.. -\y\4)若偏差f<0,则刀具向-A y方向进给一步,偏差f. .+1= f.. + x e(2)(3)5、圆弧NR1:起点坐标A (4, 0),终点坐标E (0, 4)(1)分析1)圆弧NR1为第一象限逆圆2)插补总步数:M=\(x0-x e)\+\(y0-y e)\=4+4=83)若偏差任0,则刀具向-A x方向进给一步,偏差f,+1 . = f.. ~2x. + 14)若偏差f<0,则刀具向+A y方向进给一步,偏差f, .+1 = f.. + 2y.+ 1 (2)列表计算(3)绘制进给脉冲图(略)6、圆弧NR2:起点坐标A (0, 5),终点坐标E (-5, 0)(1)分析1)圆弧NR2为第二象限逆圆2)插补总步数:M=l(x0-x e)l+l(j0-j e)l=5+5=103)若偏差任0,则刀具向-颂方向进给一步,偏差f.,+1 = f.. - 2y.+ 14)若偏差f<0,则刀具向-A x方向进给一步,偏差f,+1 . = f.. ~2x. + 1 (2)列表计算(3)绘制进给脉冲图(略)7、圆弧NR3:起点坐标A (-6, 0),终点坐标E (0, -6)(1)分析1)圆弧NR3为第三象限逆圆2)插补总步数:M=l(x0-x g)l+l(y0-y g)l=6+6=123)若偏差任0,则刀具向+A x方向进给一步,偏差f i+1j = f.. + 2x. + 14)若偏差f<0,则刀具向-A y方向进给一步,偏差f. .+1 = f.. - 2y. + 1 (2)列表计算(3)8、圆弧NR4:起点坐标A (0, -7),终点坐标E (7, 0)1)圆弧NR4为第四象限逆圆2)插补总步数:M=\(x Q-x e)\+\(y Q-y e)\=7+7=143)若偏差任0,则刀具向+A y方向进给一步,偏差f.,+1 =f.. + 2y.+ 14)若偏差f<0,则刀具向+A x方向进给一步,偏差f i+1j =加+ 2x. + 1(2)(3)9、圆弧SR1:起点坐标A (0, 4),终点坐标E (4, 0)(1)分析1)圆弧SR1为第一象限顺圆2)插补总步数:M=\(x0-x e)\+\(y0-y e)\=4+4=83)若偏差f N0,则刀具向-A y方向进给一步,偏差f, .+1 = f.. ~2y.+ 14)若偏差f<0,则刀具向+A x方向进给一步,偏差f.+1. = f.. + 2x. + 1(2)(3)绘制进给脉冲图(略)10、圆弧SR2:起点坐标A (-5,0),终点坐标E (0,5)(1)分析1)圆弧SR2为第二象限顺圆2)插补总步数:M=\(x0-x e)\+\(y0-y e)\=5+5=103)若偏差f N0,则刀具向+A x方向进给一步,偏差f,+1. = f.. + 2x. + 14)若偏差f<0,则刀具向+A y方向进给一步,偏差f, .+1 = f.. + 2y.+ 1 (2)列表计算(3)绘制进给脉冲图(略)11、圆弧SR3:起点坐标A (0, -6),终点坐标E (-6, 0)(1)分析1)圆弧SR3为第三象限顺圆2)插补总步数:M=l(x0-x e)l+l(y0-y e)l=6+6=123)若偏差任0,则刀具向+颂方向进给一步,偏差f i+1j = f,. + 2y.+ 14)+1= "j - 2x.+ 1 (2)列表计算(3)12、圆弧SR4:起点坐标A (7, 0),终点坐标E (0, -7)(1)分析1)圆弧SR4为第四象限顺圆2)插补总步数:M=l(x0-x e)l+l(y0-y e)l=7+7=143)若偏差任0,则刀具向-A x方向进给一步,偏差f. .+1 = f.j - 2x. + 14)+1.(3二、数值积分法(DDA)1、直线L1:起点坐标O (0, 0),终点坐标A (4, 6)(1)分析1)直线L1为第一象限内直线2)x e=4=100B;y e=6=110B3)取积分累加器容量N=3位4)x被积函数寄存器J vx= x e;y被积函数寄存器J vy= y e5)初始时:x累加器J Rx= 0;y累加器J Ry= 06)当J Rx累加超过3位溢出时,则在x方向分配一进给脉冲+A x7)当J Ry累加超过3位溢出时,则在y方向分配一进给脉冲+颂(2)列表计算:(3)绘制进给脉冲图(略)2、直线L2:起点坐标O(0,0),终点坐标A(-6,3)(1)分析1)直线L2为第二象限内直线2)x e=l-6l=110B;y e=3=011B3)取积分累加器容量N=3位4)x被积函数寄存器J vx= x e;y被积函数寄存器J vy= y e5)初始时:x累加器J Rx= 0;y累加器J Ry= 06)当J Rx累加超过3位溢出时,则在x方向分配一进给脉冲-A x 7)当J Ry累加超过3位溢出时,则在y方向分配一进给脉冲+A y (2)列表计算二进制累加:累加N3):累加(3)绘制进给脉冲图(略)3、直线L3:起点坐标O(0,0),终点坐标A(-5,-8)(1)分析1)直线L3为第三象限内直线2)x e=|-5|=101B;y e=|-8|=1000B3)取积分累加器容量N=4位4)x被积函数寄存器J vx= x e;y被积函数寄存器J vy= y e5)初始时:x累加器J Rx= 0;y累加器J Ry= 06)当J Rx累加超过4位溢出时,则在x方向分配一进给脉冲-A x 7)当J Ry累加超过4位溢出时,则在y方向分配一进给脉冲-A y (2)列表计算二进制累加:(3)绘制进给脉冲图(略)4、直线L4:起点坐标O (0, 0),终点坐标A (7, -4)(1)分析1)直线L4为第四象限内直线2)x e=7=111B;y e=l-4l=100B3)取积分累加器容量N=3位4)x被积函数寄存器J vx= x e;j被积函数寄存器J vy= y e5)初始时:x累加器J Rx= 0;j累加器J Ry= 06)当J Rx累加超过3位溢出时,则在x方向分配一进给脉冲+A x 7)当J Ry累加超过3位溢出时,则在j方向分配一进给脉冲-颂(2)列表计算二进制累加:N3):(3)绘制进给脉冲图(略)5、圆弧NR1:起点坐标A (4, 0),终点坐标E (0, 4)(1)分析1)圆弧NR1为第一象限逆圆2)x0=4=100B;y0=0=000B3)取积分累加器容量N=3位4)初始时:x被积函数寄存器J vx= y0;y被积函数寄存器J vy= x05)初始时:x累加器J Rx= 0;y累加器J Ry= 06)当J Rx累加超过3位溢出时,则在x方向分配一进给脉冲-A x,相应在J vy中对x 坐标的修正为减一7)当J Ry累加超过3位溢出时,则在y方向分配一进给脉冲+A y,相应在J vx中对y 坐标的修正为加一(2)列表计算(3)绘制进给脉冲图(略)7、圆弧NR3:起点坐标A (-6, 0),终点坐标E (0, -6)(1)分析1) 圆弧NR3为第三象限逆圆 2) 扁=I-6I=110B ; y 0=0=000B 3) 取积分累加器容量N=3位4) 初始时:x 被积函数寄存器J vx = y 0; y 被积函数寄存器J vy = x 0 5) 初始时:x 累加器J Rx = 0; y 累加器J Ry = 06) 当J Rx 累加超过3位溢出时,则在x 方向分配一进给脉冲+A x ,相应在J vy 中对x 坐标的修正为减一7) 当J Ry 累加超过3位溢出时,则在y 方向分配一进给脉冲-颂,相应在J vx 中对y坐标的修正为加一(2)列表计算_8_ 9 10 11 12 1314(-44) (-4,4) (-5,3) (-5,3)(-3+4=7 7+4=11 (3)停止累加2+4=6 6+4=10(2) 2+5=7 7+5=12(4) 4+6=10(2) 2+6=8(0)停止累加0 1 0 1 1 1 0(3) 绘制进给脉冲图(略)8、圆弧NR4:起点坐标A (0, -7),终点坐标E (7, 0)(1)分析1) 圆弧NR4为第四象限逆圆 8) x 0=0=000B ; j 0=|-7l=111B 9) 取积分累加器容量N=3位10) 初始时:x 被积函数寄存器J vx = y 0; y 被积函数寄存器J vy = x 0 11) 初始时:x 累加器J Rx = 0; y 累加器J Ry = 012) 当J Rx 累加超过3位溢出时,则在x 方向分配一进给脉冲+A x ,相应在J vy 中对 x 坐标的修正为加一2) 当J Ry 累加超过3位溢出时,则在y 方向分配一进给脉冲+A y ,相应在J vx 中对y 坐标的修正为减一(2)列表计算10 11 12 13 14 15(-4,-6) (-3,-6) (-2,-6) (-1,-7+6=13(5) 5+6=11(3) 3+6=9 (1) 1+6=7 7+6=13 (5)停止累加1 1 1 0 1 0停止累加(3)绘制进给脉冲图(略)9、圆弧SR1:起点坐标A (0, 4),终点坐标E (4, 0)(1)分析1) 圆弧SR1为第一象限顺圆 2) x 0=0=000B ; j 0=4=100B 3) 取积分累加器容量N=3位4) 初始时:x 被积函数寄存器J vx = y 0; y 被积函数寄存器J vy = x 0 5) 初始时:x 累加器J Rx = 0; y 累加器J Ry = 06) 当J Rx 累加超过3位溢出时,则在x 方向分配一进给脉冲+A x ,相应在J vy 中对x坐标的修正为加一7) 当J Ry 累加超过3位溢出时,则在y 方向分配一进给脉冲-颂,相应在J vx 中对y坐标的修正为减一(2)列表计算11 12 13 1415(7, -4) (7, - 3) (7, - 2)-6+5=11⑶3+7=10(2) 2+7=9(1) 1+7=8(0) 0+7=7 7+7=14(6)停止累加1 1 0 1 0(3)绘制进给脉冲图(略)10、圆弧SR2:起点坐标A (-5, 0),终点坐标E (0, 5)(1)分析1)圆弧SR2为第二象限顺圆 2) x 0=l-5l=101B ; j 0=0=000B 3) 取积分累加器容量N=3位4) 初始时:x 被积函数寄存器J vx = y 0; y 被积函数寄存器J vy = x 0 5) 初始时:x 累加器J Rx = 0; y 累加器J Ry = 06) 当J Rx 累加超过3位溢出时,则在x 方向分配一进给脉冲+A x ,相应在J vy 中对x 坐标的修正为减一7) 当J Ry 累加超过3位溢出时,则在y 方向分配一进给脉冲+A y ,相应在J vx 中对y 坐标的修正为加一(2)列表计算12 13 1415(4,2)g (41) (4,1) (4,0)3+4=7 7+4=11(3) 3+4=7 7+4=11(3)停止累加1 0 1 0(3)绘制进给脉冲图(略)11、圆弧SR3:起点坐标A (0, -6),终点坐标E (-6, 0)(1)分析1)圆弧SR3为第三象限顺圆 2) x 0=0=000B ; y 0=l-6l=110B 3) 取积分累加器容量N=3位4) 初始时:x 被积函数寄存器J vx = y 0; y 被积函数寄存器J vy = x 0 5) 初始时:x 累加器J Rx = 0; y 累加器J Ry = 06) 当J Rx 累加超过3位溢出时,则在x 方向分配一进给脉冲-A x ,相应在J vy 中对x 坐标的修正为加一7) 当J Ry 累加超过3位溢出时,则在y 方向分配一进给脉冲+A y ,相应在J vx 中对y 坐标的修正为减一(2)列表计算141514(-6,-1)15(-6,0)停止累加0(3)绘制进给脉冲图(略)12、圆弧SR4:起点坐标A (7, 0),终点坐标E (0, -7)(1)分析1)圆弧SR4为第四象限顺圆2)x0=7=111B;j0=0=000B3)取积分累加器容量N=3位4)初始时:x被积函数寄存器J vx= y0;y被积函数寄存器J vy= x05)初始时:x累加器J Rx= 0;y累加器J Ry= 06)当J Rx累加超过3位溢出时,则在x方向分配一进给脉冲-A x,相应在J vy中对x 坐标的修正为减一7)当J Ry累加超过3位溢出时,则在y方向分配一进给脉冲-A y,相应在J vx中对y 坐标的修正为加一(2)列表计算(3)绘制进给脉冲图(略)。
§2—1 逐点比较法逐点比较法是我国数控机床中广泛采用的一种插补方法,它能实现直线、圆弧和非圆二次曲线的插补,插补精度较高。
逐点比较法,顾名思义,就是每走一步都要将加工点的瞬时坐标同规定的图形轨迹相比较,判断其偏差,然后决定下一步的走向,如果加工点走到图形外面去了,那么下一步就要向图形里面走;如果加工点在图形里面,那么下一步就要向图形外面走,以缩小偏差。
这样就能得出一个非常接近规定图形的轨迹,最大偏差不超过一个脉冲当量。
在逐点比较法中,每进给一步都须要进行偏差判别、坐标进给、新偏差计算和终点比较四个节拍。
下面分别介绍逐点比较法直线插补和圆弧插补的原理。
一、 逐点比较法直线插补如上所述,偏差计算是逐点比较法关键的一步。
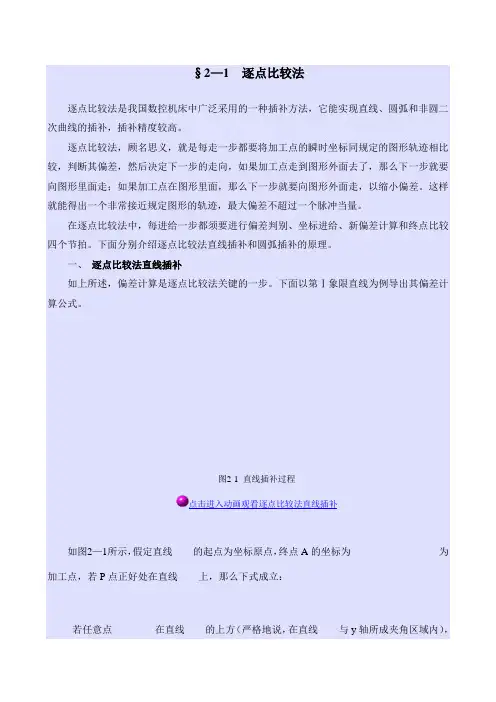
下面以第Ⅰ象限直线为例导出其偏差计算公式。
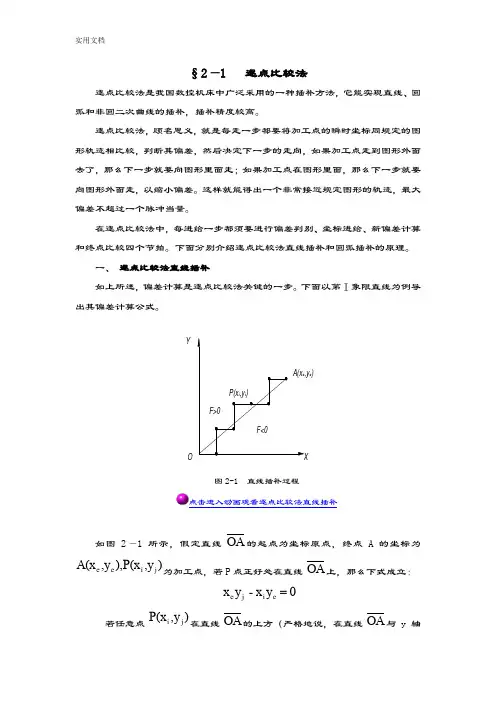
图 2-1 直 线 差 补 过 程e )OY图2-1 直线插补过程点击进入动画观看逐点比较法直线插补如图2—1所示,假定直线 OA 的起点为坐标原点,终点A 的坐标为e e i j A(x ,y ),P(x ,y )为加工点,若P 点正好处在直线OA 上,那么下式成立:e j i e x y - x y 0若任意点i j P(x ,y )在直线 OA 的上方(严格地说,在直线OA 与y 轴所成夹角区域内),那么有下述关系成立:jei ey y x x >亦即:e j i e x y - x y 0>由此可以取偏差判别函数ij F 为:ij e j i e F x y - x y =由 ij F 的数值(称为“偏差”)就可以判别出P 点与直线的相对位置。
即: 当 ij F =0时,点i j P(x ,y )正好落在直线上;当 ij F >0时,点i j P(x ,y )落在直线的上方;当ij F <0时,点i j P(x ,y )落在直线的下方。
从图2—1看出,对于起点在原点,终点为A ( e e x ,y )的第Ⅰ象限直线OA 来说,当点P 在直线上方(即ij F >0)时,应该向+x 方向发一个脉冲,使机床刀具向+x 方向前进一步,以接近该直线;当点P 在直线下方(即ij F <0)时,应该向+y 方向发一个脉冲,使机床刀具向+y 方向前进一步,趋向该直线;当点P 正好在直线上(即 ij F =0)时,既可向+x 方向发一脉冲,也可向+y 方向发一脉冲。
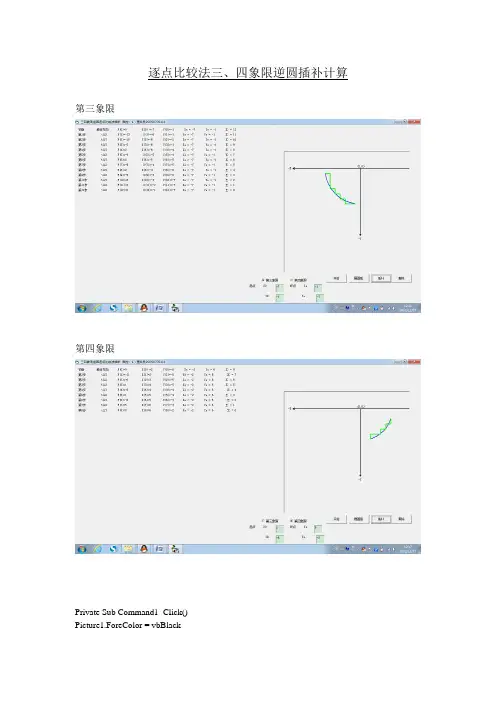
逐点比较法三、四象限逆圆插补计算第三象限第四象限Private Sub Command1_Click()Picture1.ForeColor = vbBlackPicture1.DrawWidth = 2Picture1.Line (500, 1000)-(8500, 1000) '画直线坐标轴Picture1.Line (4500, 1000)-(4500, 5000)Picture1.CurrentX = 230 '当前位置Picture1.CurrentY = 900Picture1.Print "-X" '坐标轴标注Picture1.CurrentX = 4300Picture1.CurrentY = 800Picture1.Print "(0,0)"Picture1.CurrentX = 8650Picture1.CurrentY = 900Picture1.Print "X"Picture1.CurrentX = 4400Picture1.CurrentY = 5100Picture1.Print "-Y"Picture1.Line (500, 1000)-(600, 950) '箭头Picture1.Line (500, 1000)-(600, 1050)Picture1.Line (8500, 1000)-(8400, 950)Picture1.Line (8500, 1000)-(8400, 1050)Picture1.Line (4500, 5000)-(4450, 4900)Picture1.Line (4500, 5000)-(4550, 4900)End SubPrivate Sub 坐标判别_Click()If Not (Option1.V alue = True Or Option2.V alue = True) Thenans = MsgBox("出错了,请选择象限", 48, "提示信息")End IfDim a, b, c, d, n, m As IntegerDim r As Singlea = V al(Text1.Text)b = V al(Text2.Text)c = V al(Text3.Text)d = V al(Text4.Text)n = a * a + b * bm = c * c + d * dr = Sqr(n)If Option1.V alue = True ThenIf Not (a <= 0 And b <= 0 And c <= 0 And d <= 0) ThenGoTo wwElseIf Not (a < c And b > d) ThenGoTo ww1ElseIf n <> m ThenGoTo ww2End IfEnd IfIf Option2.V alue = True ThenIf Not (a >= 0 And b <= 0 And c >= 0 And d <= 0) ThenGoTo wwElseIf Not (a < c And b < d) ThenGoTo ww1ElseIf n <> m ThenGoTo ww2End IfEnd IfGoTo ww4ww: ans = MsgBox("出错了,逆圆弧起点、终点不在该象限,请重新输入", 48, "提示信息")GoTo ww3ww1: ans = MsgBox("出错了,逆圆弧起点、终点位置错误,请重新输入", 48, "提示信息") GoTo ww3ww2: ans = MsgBox("出错了,该象限所绘圆弧不以原点为圆心,请重新输入", 48, "提示信息")ww3: Text1.Text = ""Text2.Text = ""Text3.Text = ""Text4.Text = ""Text1.SetFocusGoTo ww4ww4:End SubPrivate Sub Command4_Click()If Not (Option1.V alue = True Or Option2.V alue = True) Thenans = MsgBox("出错了,请选择象限", 48, "提示信息")End IfDim a, b, c, d, n, m As IntegerDim r As Singlea = V al(Text1.Text)b = V al(Text2.Text)c = V al(Text3.Text)d = V al(Text4.Text)n = a * a + b * bm = c * c + d * dr = Sqr(n)If Option1.V alue = True ThenIf Not (a <= 0 And b <= 0 And c <= 0 And d <= 0) ThenGoTo wwElseIf Not (a < c And b > d) ThenGoTo ww1ElseIf n <> m ThenGoTo ww2End IfEnd IfIf Option2.V alue = True ThenIf Not (a >= 0 And b <= 0 And c >= 0 And d <= 0) ThenGoTo wwElseIf Not (a < c And b < d) ThenGoTo ww1ElseIf n <> m ThenGoTo ww2End IfEnd IfPicture1.ForeColor = vbBluePicture1.DrawWidth = 2If Option1.V alue = True ThenIf b = 0 ThenIf c = 0 ThenPicture1.Circle (4500, 1000), r * 300, , 3.14159, 3 * 3.14159 / 2ElsePicture1.Circle (4500, 1000), r * 300, , 3.14159, Atn(d / c) + 3.14159End IfElseIf c = 0 ThenPicture1.Circle (4500, 1000), r * 300, , Atn(b / a) + 3.14159, 3 * 3.14159 / 2 ElsePicture1.Circle (4500, 1000), r * 300, , Atn(b / a) + 3.14159, Atn(d / c) + 3.14159 End IfEnd IfIf Option2.V alue = True ThenIf a = 0 ThenIf d = 0 ThenPicture1.Circle (4500, 1000), r * 300, , 3 * 3.14159 / 2, 2 * 3.14159ElsePicture1.Circle (4500, 1000), r * 300, , 3 * 3.14159 / 2, Atn(d / c) + 3.14159 * 2 End IfElseIf d = 0 ThenPicture1.Circle (4500, 1000), r * 300, , Atn(b / a) + 3.14159 * 2, 2 * 3.14159 ElsePicture1.Circle (4500, 1000), r * 300, , Atn(b / a) + 3.14159 * 2, Atn(d / c) + 3.14159 * 2End IfEnd IfGoTo ww4ww: ans = MsgBox("出错了,逆圆弧起点、终点不在该象限,请重新输入", 48, "提示信息")GoTo ww3ww1: ans = MsgBox("出错了,逆圆弧起点、终点位置错误,请重新输入", 48, "提示信息") GoTo ww3ww2: ans = MsgBox("出错了,该象限所绘圆弧不以原点为圆心,请重新输入", 48, "提示信息")ww3: Text1.Text = ""Text2.Text = ""Text3.Text = ""Text4.Text = ""Text1.SetFocusGoTo ww4ww4:End SubPrivate Sub Command2_Click()Dim k, m, j, l, n, F(30), X(30), Y(30) As Integer, a As Integer, b As Integer, c As Integer, d As Integera = Int(Text1)b = Int(Text2)c = Int(Text3)d = Int(Text4)m = 0l = 0k = 0F(m) = 0X(m) = aY(m) = bPicture1.ForeColor = vbGreenPicture1.DrawWidth = 3j = Abs(Abs(a) - Abs(c)) + Abs(Abs(b) - Abs(d))Form1.CurrentX = 200Form1.CurrentY = 200Print "初始", "进给方向", "F(0)=0", " X(0) =" & Int(Text1), " Y(0)=" & Int(Text2), " Xe = " & Int(Text4), "Y e = " & Int(Text3), " ∑= " & jIf Option1.V alue = True Then '第三象限插补For n = 1 To jIf F(m) >= 0 And j > 0 Thenm = m + 1l = l + 1F(m) = F(m - 1) - 2 * Abs(X(m - 1)) + 1X(m) = X(m - 1) + 1Y(m) = Y(m - 1)Picture1.Line (4500 + 300 * (a + l - 1), 1000 - 300 * (b - k))-(4500 + 300 * (a + l), 1000 - 300 * (b - k))Form1.CurrentX = 200Form1.CurrentY = 200 + m * 300Print "第" & m & "步", " -△X ", "F(" & m & ")=" & F(m), " X(" & m & ")=" & X(m), " Y(" & m & ")=" & Y(m), " Xe = " & Int(Text4), " Y e = " & Int(Text3), " ∑= " & j - nElsek = k + 1m = m + 1F(m) = F(m - 1) + 2 * Abs(Y(m - 1)) + 1Y(m) = Y(m - 1) - 1X(m) = X(m - 1)Picture1.Line (4500 + 300 * (a + l), 1000 - 300 * (b - k + 1))-(4500 + 300 * (a + l), 1000 - 300 * (b - k))Form1.CurrentX = 200Form1.CurrentY = 200 + m * 300Print "第" & m & "步", " +△Y", "F(" & m & ")=" & F(m), "X(" & m & ")=" & X(m), " Y(" & m & ")=" & Y(m), " Xe = " & Int(Text4), "Y e = " & Int(Text3), " ∑= " & j - n; ""End IfNext nElseIf Option2.V alue = True Then '第四象限插补For n = 1 To jIf F(m) >= 0 And j > 0 Thenm = m + 1k = k + 1F(m) = F(m - 1) - 2 * Abs(Y(m - 1)) + 1X(m) = X(m - 1)Y(m) = Y(m - 1) + 1Picture1.Line (4500 + 300 * (a + l), 1000 - 300 * (b + k - 1))-(4500 + 300 * (a + l), 1000 - 300 * (b + k))Form1.CurrentX = 200Form1.CurrentY = 200 + m * 300Print "第" & m & "步", " -△Y", "F(" & m & ")=" & F(m), "X(" & m & ")=" & X(m), " Y(" & m & ")=" & Y(m), " Xe = " & Int(Text4), " Y e = " & Int(Text3), " ∑= " & j - nElsel = l + 1m = m + 1F(m) = F(m - 1) + 2 * Abs(X(m - 1)) + 1Y(m) = Y(m - 1)X(m) = X(m - 1) + 1Picture1.Line (4500 + 300 * (a + l - 1), 1000 - 300 * (b + k))-(4500 + 300 * (a + l), 1000 - 300 * (b + k))Form1.CurrentX = 200Form1.CurrentY = 200 + m * 300Print "第" & m & "步", " +△X ", "F(" & m & ")=" & F(m), " X(" & m & ")=" & X(m), " Y(" & m & ")=" & Y(m), " Xe = " & Int(Text4), " Y e = " & Int(Text3), " ∑= " & j - nEnd IfNext nEnd IfEnd SubPrivate Sub Command3_Click() '清除Text1.Text = ""Text2.Text = ""Text3.Text = ""Text4.Text = ""Picture1.ClsForm1.ClsText1.SetFocus。

****学院课程设计说明书设计题目:逐点比较法第一二象限的顺圆插补系部:机电工程系专业:自动化(数控技术)班级:姓名:学号:指导老师:起止时间:年月日至年月日共周年月日目录一、课程设计的目的 (3)二、课程设计的任务 (3)三、逐点比较法基本原理 (4)四、逐点比较法插补软件流程图 (8)五、算法描述(在VB中的具体实现) (9)六、编写算法程序清单 (9)七、软件运行仿真效果 (12)八、参考文献 (15)九、设计小结 (15)逐点比较法第一二象限的顺圆插补一、课程设计的目的1)了解连续轨迹控制数控系统的组成原理。
2) 掌握逐点比较法插补的基本原理。
3)掌握逐点比较法插补的软件实现方法。
二、课程设计的任务逐点比较法插补是最简单的脉冲增量式插补算法之一,其过程清晰,速度平稳,但一般只用于一个平面内两个坐标轴的插补运算。
其基本原理是在刀具按要求轨迹运动加工零件轮廓的过程中,不断比较刀具与被加工零件轮廓之间的相对位置,并根据比较结果决定下一步的进给方向,使刀具向减小偏差的方向进给,且只有一个方向的进给。
也就是说,逐点比较法每一步均要比较加工点瞬时坐标与规定零件轮廓之间的距离,依此决定下一步的走向。
如果加工点走到轮廓外面去了,则下一步要朝着轮廓内部走;如果加工点处在轮廓的内部,则下一步要向轮廓外面走,以缩小偏差,这样周而复始,直至全部结束,从而获得一个非常接近于数控加工程序规定轮廓的轨迹。
逐点比较法插补过程中的每进给一步都要经过偏差判别、坐标进给、偏差计算和终点判别四个节拍的处理,其工作流程图如图所示。
三、基本原理(1)逐点比较法I 象限顺圆插补基本原理在加工圆弧过程中,人们很容易联想到使用动点到圆心的距离与该圆弧的名义半径进行比较来反映加工偏差。
假设被加工零件的轮廓为第Ⅰ象限顺走向圆弧SE ,,圆心在O (0,0),半径为R ,起点为S (X S ,Y S ),终点为E (X e ,Y e ),圆弧上任意加工动点为N (X i ,Y i )。
§2—1逐点比较法逐点比较法是我国数控机床中广泛采用的一种插补方法,它能实现直线、圆弧和非圆二次曲线的插补,插补精度较高。
逐点比较法,顾名思义,就是每走一步都要将加工点的瞬时坐标同规定的图形轨迹相比较,判断其偏差,然后决定下一步的走向,如果加工点走到图形外面去了,那么下一步就要向图形里面走;如果加工点在图形里面,那么下一步就要向图形外面走,以缩小偏差。
这样就能得出一个非常接近规定图形的轨迹,最大偏差不超过一个脉冲当量。
在逐点比较法中,每进给一步都须要进行偏差判别、坐标进给、新偏差计算和终点比较四个节拍。
下面分别介绍逐点比较法直线插补和圆弧插补的原理。
一、逐点比较法直线插补如上所述,偏差计算是逐点比较法关键的一步。
下面以第Ⅰ象限直线为例导出其偏差计算公式。
图2-1 直线插补过程点击进入动画观看逐点比较法直线插补如图2—1所示,假定直线的起点为坐标原点,终点A的坐标为为加工点,若P点正好处在直线上,那么下式成立:若任意点在直线的上方(严格地说,在直线与y轴所成夹角区域内),那么有下述关系成立:亦即:由此可以取偏差判别函数为:由的数值(称为“偏差”)就可以判别出P点与直线的相对位置。
即:当=0时,点正好落在直线上;当>0时,点落在直线的上方;当<0时,点落在直线的下方。
从图2—1看出,对于起点在原点,终点为A()的第Ⅰ象限直线OA来说,当点P 在直线上方(即>0)时,应该向+x方向发一个脉冲,使机床刀具向+x方向前进一步,以接近该直线;当点P在直线下方(即<0)时,应该向+y方向发一个脉冲,使机床刀具向+y方向前进一步,趋向该直线;当点P正好在直线上(即=0)时,既可向+x方向发一脉冲,也可向+y方向发一脉冲。
因此通常将>0和=0归于一类,即≥0。
这样从坐标原点开始,走一步,算一次,判别,再趋向直线,逐点接近直线,步步前进。
当两个方向所走的步数和终点坐标A()值相等时,发出终点到达信号,停止插补。
逐点比较法第一象限直线插补编程逐点比较法是以折线来逼近给定的轨迹,就是每走一步控制系统都要将加工点与给定的图形轨迹相比较,以决定下一步进给的方向,使之逼近加工轨迹。
逐点比较法以折线来逼近直线或圆弧,其最大的偏差不超过一个最小设定单位。
只要将脉冲当量取得足够小,就可以达到精度要求。
逐点比较插补法在脉冲当量为0.01mm,系统进给速度小于3000mm/min时,能很好的满足要求。
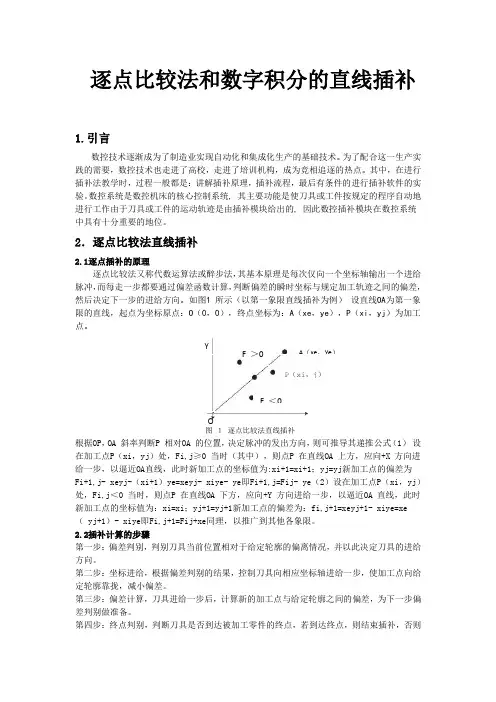
一、逐点比较法直线插补如下图所示设直线 oA 为第一象限的直线,起点为坐标原点o (0 , 0) ,终点坐标为, A( ) , P() 为加工点。
若 P 点正好处在直线 oA 上,由相似三角形关系则有即点在直线 oA 上方 ( 严格为直线 oA 与 y 轴正向所包围的区域 ) ,则有即若 P 点在直线 oA 下方 ( 严格为直线 oA 与 x 轴正向所包围的区域 ) ,则有图 3 — 1 逐点比较法第一象限直线插补即令则有:①如,则点 P 在直线 oA 上,既可向 +x 方向进给一步,也可向 +y 方向进给一步;②如,则点 P 在直线 oA 上方,应向 +x 方向进给一步,以逼近oA直线;③如,则点 P 在直线 oA 下方,应向 +y 方向进给一步,以逼近 oA直线一般将及视为一类情况,即时,都向 +x 方向进给一步。
当两方向所走的步数与终点坐标相等时,停止插补。
这即逐点比较法直线插补的原理。
对第一象限直线 oA 从起点 ( 即坐标原点 ) 出发,当 F时, +x 向走一步;当 F<0 时,y 向走一步。
特点:每一步都需计算偏差,这样的计算比较麻烦。
递推的方法计算偏差:每走一步后新的加工点的偏差用前一点的加工偏差递推出来。
采用递推方法,必须知道开始加工点的偏差,而开始加工点正是直线的起点,故。
下面推导其递推公式。
设在加工点 P( ) 处,,则应沿 +x 方向进给一步,此时新加工点的坐标值为新加工点的偏差为即若在加工点 P( ) 处,,则应沿 +y 方向进给一步,此时新加工点的坐标值为,新加工点的偏差为即综上所述,逐点比较法直线插补每走一步都要完成四个步骤 ( 节拍 ) ,即:(1) 位置判别根据偏差值大于零、等于零、小于零确定当前加工点的位置。
第二节逐点比较法插补(数控基础第三章插补计算原理、刀具半径补偿与速度控制)发布:2009-7-19 19:24 | 作者:唐义|来源:本站|查看:6次|字号:小中大逐点比较法的基本原理是被控对象在按要求的轨迹运动时,每走一步都要与规定的轨迹进行比较,由此结果决定下一步移动的方向。
逐点比较法既可以作直线插补又可以作圆弧插补。
这种算法的特点是,运算直观,插补误差小于一个脉冲当量,输岀脉冲均匀,而且输岀脉冲的速度变化小,调节方便,因此在两坐标数控机床中应用较为普遍。
一、逐点比较法直线插补 1 .逐点比较法的直线插补原理在图3-1所示平面第一象限内有直线段以原点为起点,以为终点,直线方程为:第一象限直线插,改写为:如果加工轨迹脱离直线,则轨迹点的、坐标不满足上述直线方程。
在第一象限中,对位于直线上方的点则有:对位于直线下方的点B,则有:当加工点落在直线上时,;当加工点落在直线上方时,;当加工点落在直线下方时,。
我们称为直线插补偏差判别式”或偏差判别函数”,的数值称为偏差例如图3-2待加工直线,我们运用下述法则,根据偏差判别式,求得图中近似直线(由折线组成)。
若刀具加工点的位置处在直线上方(包括在直线上),即满足>0时向轴方向发岀一个正向运动的进给脉冲(),使刀具沿轴坐标动一步(一个脉冲当量5),逼近直线;若刀具加工点的位置处在直线下方, 即满足V0时,向轴发出一个正向运动的进给脉冲(),使刀具沿轴移动一步逼近直线。
但是按照上述法则进行运算判别,要求每次进行判别式运算一一乘法与减法运算,这在具体电路或程序中实现不是最方便的。
一个简便的方法是:每走一步到新加工点,加工偏差用前一点的加工偏差递推岀来,这种方法称递推法”。
若>0时,则向轴发岀一进给脉冲,刀具从这点向方向迈进一步,新加工点的偏差值为叽•=耳儿-E +1)兀p=耳丹-否几-y』二% -儿p眼昌疑j =昌j -儿(3-1)屮如果某一时刻加工点玖花申)的骂j<0时,则向》瞬岀一进给脉冲,刀具从这点向丿方向迈进一歩,新加工点P(耳儿J的偏差值尬耳护 1 二兀+1)一 3 *=兀片-咼几+ 2眼恥产% +兀(3-2h根据式(3-1 )及式(3-2 )可以看出,新加工点的偏差值完全可以用前一点的偏差递推出来。