双胶合望远镜头设计
- 格式:doc
- 大小:444.50 KB
- 文档页数:20
各专业全套优秀毕业设计图纸《光电系统》课程设计报告姓名:唐晋川班级:0211102学号:2011210818一、设计题目——双胶合透镜优化设计双胶合透镜优化设计双胶合透镜是一种常用的望远物镜,它结构简单、光能损失小,合理选择玻璃和弯曲能校正球差,慧差、色差和像差,但不能消除象散、场曲与畸变。
根据上述原理使用OSLO软件进行双胶合透镜的设计并对其中一种特性进行优化设计,使得双胶合透镜的参数比较理想。
二、设计原理双胶合透镜优化设计:双胶合透镜是一种常用的望远物镜,它结构简单、光能损失小,合理选择玻璃和弯曲能校正球差,慧差、色差和像差,但不能消除象散、场曲与畸变。
优化是光学系统设计过程中最重要的一步,一般来说初始结构的像质并不是很理想的,只有经过优化才能使光学系统的性能达到我们需要的状态。
通过初始设计的双胶合透镜像差不符合要求,所以要对其进行优化。
优化之前要进行两个必要的步骤:要确定优化变量和选用评价函数。
理论上讲,透镜组的全部结构参数都可以作为优化变量参与优化,光学系统中影响像质的因素是曲率半径r,折射率n和厚度d。
三、实验日志:1、使用oslo软件对双胶合透镜进行设计。
2、使用oslo软件对双胶合透镜进行优化设计。
四、实验步骤双胶合透镜设计并优化(1)双胶合透镜设计○1新建镜头文件○2输入透镜光学特性参数○3输入镜面数据○4保存透镜数据(2)双胶合透镜优化○1打开透镜文件并另存○2设置优化变量○3设置误差函数○4进行优化五、实验结果与分析双胶合透镜优化设计我对双胶合透镜所进行的优化是从透镜的像差着手进行的,从后面的数据中我们可以看出通过改变透镜的曲率半径、光圈大小和透镜的厚度都可以明显改善透镜的像差,从而提高透镜的成像质量。
综合考虑,我进行了三次优化,分别通过优化曲率半径、优化光圈大小和优化透镜的厚度来达到设计的目的。
双胶合透镜的原始最小RMS值为4.252773,像差值为-0.031841。
经过优化曲率半径后的最小RMS值为2.506337,像差值为-0.018681,经过优化透镜的厚度的最小RMS 值为1.8,像差值为-0.17142,最后经过优化光圈大小得出了经过三次优化的透镜的最小RMS值为1.639445,像差值为-0.014059,显然我们得出了很好的效果使得仿真比较成功。

光电系统模拟与仿真设计报告姓名:学号:专业:光电技术学院实验一Zemax仿真设计实验目的1.熟悉Zemax实验环境,练习使用元件库中的常用元件组建光学系统。
2.利用Zeamx的优化功能设计光学系统并使其系统的各项性能参数达到最优。
实验内容(1、2中任选一个,3必做)1、显微物镜系统设计在图1 显示一个10X 显微物镜。
其包含二组远距的胶合双重透镜(Lister型式)。
NA:0.25;EFL=0.591。
表1 提供了这个设计的数据。
第一镜面到像距为0.999。
第一镜面到物距为6.076。
最后一面供作保护面之用。
畸变=0.26﹪。
图1 10倍显微物镜系统表1 10倍显微物镜参数要求:(1)运用zemax软件仿真实现该系统,并进行像质评价和分析,给出多个波长和多个视场的像质评价和分析。
(2)改变某一Lens Data,观察像质评价和分析,然后设置该Lens Data为变量并进行优化,再观察像质评价和分析,最后比较优化前后结果,在此基础上多选几个变量进行优化看能否得到更好的像质。
(3)在原有系统基础上再加一个单透镜或双透镜,选取一定的参数进行优化,看能否得到更好像质的系统。
(4)改变系统波长,观察像质评价和分析,重复完成(3),比较优化前后像质情况。
2、望远镜头系统设计在图2 是一个望远镜头具有20°视场以及EFL=5 。
这个镜组的资料给定在表2。
图2 望远镜头系统表2 望远镜头系统参数要求:(1)运用zemax软件仿真实现该系统,并进行像质评价和分析,给出多个波长和多个视场的像质评价和分析。
(2)改变某一Lens Data,观察像质评价和分析,然后设置该Lens Data为变量并进行优化,再观察像质评价和分析,最后比较优化前后结果,在此基础上多选几个变量进行优化看能否得到更好的像质。
(3)在原有系统基础上再加一个单透镜或双透镜,选取一定的参数进行优化,看能否得到更好像质的系统。
(4)改变系统波长,观察像质评价和分析,重复完成(3),比较优化前后像质情况。
双胶合望远物镜的设计
1.确定要设计的望远镜的需求和目标。
这包括确定观测目标的类型(是天文观测还是地球观测)、期望的分辨率和光学口径等。
2.确定物镜的基本参数。
物镜的基本参数包括光学口径、焦距和波长范围等。
根据观测需求和目标来确定这些参数,以便在设计过程中进行优化。
3.进行双胶合物镜的初步设计。
双胶合物镜由两个物镜镜头组成,其中一个作为物镜,另一个作为准直镜。
初步设计包括确定物镜和准直镜的曲率半径、厚度、孔径等参数,并进行初步的光学系统分析和优化。
4.进行双胶合物镜的最终设计。
最终设计包括对镜片的形状、曲率、厚度等进行进一步优化,使得物镜和准直镜在光学性能上达到最佳状态。
这一步骤通常需要使用光学设计软件进行模拟和分析。
5.进行光学系统的完整性分析。
完成物镜和准直镜的设计后,需要对整个光学系统进行分析,以确保在不同焦距和观测条件下都能达到预期的性能。
这包括通过使用衍射图像圆点函数来评估系统的分辨率和像差,以及通过光学路径分析来评估系统的定位和稳定性。
6.进行光学系统的组装和调试。
一旦完成了光学系统的设计和分析,就可以进行物镜和准直镜的组装和调试。
这包括对镜片进行抛光和涂镀,以及对光学系统进行调整和校准,以使其达到预期的性能。
以上就是双胶合望远物镜的设计步骤。
双胶合望远物镜的设计是一个复杂和细致的过程,需要充分考虑观测需求和目标,并进行仔细的光学系统分析和优化。
通过合理地设计和调整,双胶合望远物镜可以在天文观测和地球观测中发挥出更好的性能,提供更清晰和准确的图像和数据。
光学设计课程报告班级:学号:姓名:日期:目录双胶合望远物镜的设计 (02)摄远物镜的设计 (12)对称式目镜的设计与双胶合物镜的配合 (20)艾尔弗目镜的设计 (30)低倍消色差物镜的设计 (38)无限筒长的高倍显微物镜的设计 (47)双高斯照相物镜的设计 (52)反摄远物镜的设计 (62)课程总结 (70)双胶合望远物镜的设计1、设计指标:设计一个周视瞄准镜的双胶合望远物镜(加棱镜),技术要求如下:视放大率:3.7⨯;出瞳直径:4mm ;出瞳距离:大于等于20mm ;全视场角:210w =︒;物镜焦距:'=85f mm物;棱镜折射率:n=(K9);棱镜展开长:31mm ;棱镜与物镜的距离40mm ;孔径光阑为在物镜前35mm 。
2、初始结构计算 (1) 求J h h z ,,根据光学特性的要求4.728.142===D h :44.75tan 85tan ''=⨯=•= ωf y0871.0''==f h u648.0'''==y u n J(2)计算平行玻璃板的像差和数CS S S I I I I ,,平行玻璃板入射光束的有关参数为0871.0=u0875.0)5tan(-=-= z u 005.1-=u u z平行玻璃板本身的参数为d=31mm ; n=; 1.64=ν 带入平行玻璃板的初级像差公式可得:000665.01.51631-1.5163×0.0871×-311324432-==--=I du n n S0.0006682=(-1.005)×-0.000665=u u ×=zI I I S S000824.0087.05163.11.6415163.13112222-=⨯⨯-⨯-=--=I u n n dS C υ(3)根据整个系统的要求,求出系统的像差和数S Ⅰ,S Ⅱ,C SⅠ:为了保证补偿目镜的像差,要求物镜系统(包含双胶合物镜和棱镜)的像差为:'m δL =0.1mm ,'0.001m SC =-,'0.05FC L mm ∆=(4)列出初级像差方程式求解双胶合物镜的C W P ,,∞∞由于棱镜物镜系统S S S +=所以双胶合物镜的像差和数为000852.0-棱镜系统-==I I I S S S0019642.0-棱镜系统-==II II I I S SS000444.0-棱镜系统==I I I C CS SS C(5)列出初级像差方程求P ,W ,C(6)由P ,W ,C 求C W P ,,∞∞由于h=,f ’=85,因此有进而可得:174.0)(3==ϕh P P3994.0)(2==ϕh W W由于望远镜本身对无限远物平面成像,因此无需再对物平面位置进行归化:174.0==∞P P 3994.0==∞W W将∞∞W P ,带入公式求0P根据,查找玻璃组合。
双筒棱镜望远镜设计
首先是目镜。
目镜是用于观察天体的光学组件。
它通常由一组透镜组成,可以放大通过物镜收集到的光线。
目镜的放大倍数可以通过更改透镜的焦距来调节。
较高的放大倍数可以提供更详细的天体图像,但对望远镜的稳定性和视野大小要求更高。
接下来是物镜。
物镜是双筒棱镜望远镜的主要光学组件之一、它由两个凸透镜组成,负责收集和聚焦天体的光线。
物镜的焦距确定了望远镜的放大倍数。
较长的焦距提供更大的放大倍数,但也会导致视野更狭窄。
同样,较短的焦距提供更大的视野,但放大倍数较低。
然后是眼镜。
眼镜是用于观察物体的光学组件。
它由一组透镜组成,放置在目镜的后方。
眼镜的作用是调整视野和放大倍数,以提供更舒适的观察体验。
它还可以调节光线的对焦,使图像更清晰。
最后是支撑结构。
支撑结构是望远镜的骨架,用于支撑和固定各个光学组件。
它通常由金属材料制成,以提供良好的稳定性和耐用性。
支撑结构还包括一个可调节的三脚架,以便将望远镜固定在适当的高度上。
除了上述主要组件外,双筒棱镜望远镜还可能包括其他附件,如经纬仪、红点指示器和相机适配器等。
这些附件可以提供更准确的观察定位和更多的应用选择。
总结起来,双筒棱镜望远镜设计非常简单,但其原理和功能强大。
通过优化各个光学组件的参数和选择合适的材料,可以获得高质量的观察体验。
尽管双筒棱镜望远镜在放大倍数和视野之间存在一定的取舍,但它仍是一种广泛使用的望远镜类型,适用于观察各种天体和地面景象。
镜头结构设计镜头不是凭空设计的。
虽然我们现在有了很好的计算机辅助设计软件,但从头设计一个镜头,抛弃掉前人上百年的成果,仍然是不太现实的。
但是镜头设计师也不会从本来就很差的镜头处起步设计,他们总是选择比较好的镜头。
所以,在这一百多年的时间里,大浪淘沙加上市场选择,就出现6种影响特别大的光学设计。
现在的镜头都是从它们那里继承下来的。
这六种光学设计分别是Petzval人像镜头、快速直线镜头、双高斯镜头、望远镜头、反望远(后对焦)镜头和库克三片镜头。
1、Petzval镜头这就是Voigitlander发家的东西。
不过,他是从Petzval处偷来的设计。
发明于1850年之前。
虽然这个设计已经不太用了,但直到20世纪50年代,都是很广泛使用的。
比如投影机。
“放大头”是不是也是这种?2、快速直线镜头它的特点就是对称于光圈。
因为这个特点,它的变形、慧差和平面色差都处理得很好。
然后它比较容易有球差、场曲和像散。
快速直线镜头发明于1860年代。
因为它没有啥变形,所以非常适合建筑和风光摄影。
直到1900年代,都是很流行的。
我估计这也就是Eugene Atget用的镜头了。
它的传人很多。
最有名的就是蔡司Protar和后来的Tessar了。
Tessar之后又发展出了一堆好镜头,不过这是后话了。
在库克三片镜头的时候会涉及到。
3、双高斯镜头虽然叫“高斯”,但这个镜头设计其实是和高斯没多少关系的。
高斯只是计算和描述了这个概念,而且他还是针对望远镜说的。
这个镜头最早是1888年出现的,是在高斯死了30多年之后了。
双高斯的特点是对称于光圈(早期的镜头其实都是这么设计的,否则像差会不得了),而且它还使用了全部弧形和分离的镜片(这点和快速直线镜头不同),这使得它能做到很大的光圈,而且把场曲和色散的问题基本避免了。
不过它也容易产生像散和球差。
今天,基本上50mm的定焦镜头全都是这个设计的。
天才的蔡司设计师兰道夫博士在双高斯的基础上做了一些改进,就形成了Planar 结构。
应用光学课程设计火炮周视瞄准镜初步设计专业:光电信息科学与工程班级:姓名:完成时间:目录一、火炮周视瞄准镜概述 (4)二、光学系统的技术要求 (4)2.1、光学特性的主要参数 (4)三、拟定光学系统的工作原理 (5)3.1、光学系统的基本形式 (5)3.2、光学系统的基本结构 (5)3.3、共轴系统和棱镜系统的组合 (7)3.4、孔径光阑的确定 (7)四、光学系统外形尺寸的计算 (7)4.1、选择物镜、目镜结构型式,计算其特性参数 (7)⑴、选择目镜结构形式并计算有关特性参数 (7)⑴、选择目镜结构形式并计算有关特性参数 (8)4.2、计算道威棱镜尺寸并验证渐晕系数 (9)4.3、计算顶部棱镜、保护玻璃尺寸 (12)4.4、计算物镜口径 (14)4.5、确定底部直角棱镜和分划板尺寸 (15)4.6、确定目镜口径 (17)4.7、验证出瞳距离与潜望高 (17)五、绘制光学系统原理图 (18)5.1、光学系统参数总结 (18)5.2、光学系统原理图 (20)六、工程伦理与职业道德 (21)七、环境与可持续性 (22)八、技术与社会 (22)九、法律法规 (24)十、个人和团队 (24)十一、创新方法 (24)附录 (24)一、棱镜转动定理 (24)二、理想光学系统光路计算公式 (28)一、火炮周视瞄准镜概述军事上火炮打击中为了搜索目标,需要在行动中进行大范围的观察从而提高火炮的破坏力以及精准度,而由于受到像差等因素的限制,传统的望远系统以及不再合适,我们需要一种光学系统,使其视准轴能够在水平面内横扫以达到全方位观察的目的,而这种光学仪器我们称之为周视瞄准镜。
火炮周视瞄准镜是一种比较特殊的潜望式瞄准镜,它的作用主要有两个:首先,观察员可以使用它来观察周围的环境、寻找需要锁定的目标,在这个过程中,观察员可以观察到自己直视方向以外任意水平方向(包括一定角度范围内的俯仰方向)的物体而不用改变自己的方向,这是由于周视瞄准镜的前端有一个道威棱镜,观察员在以速度比为一比二的速度同时转动道威棱镜以及顶端的棱镜的时候,可以保证目镜位置不变,从而可以使观察员在不改变自己的位置的前提下选择不同位置的瞄准点,这样也就避免了观察员为了观察不同方向的物体而不停转动头部引起的头晕恶心等症状。
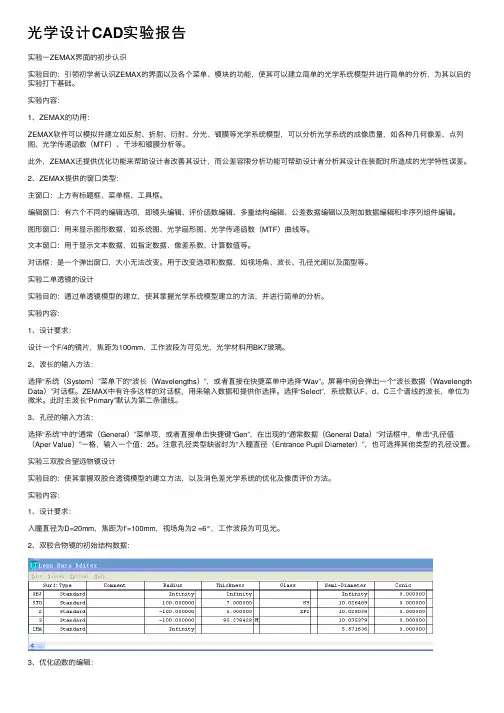
光学设计CAD实验报告实验⼀ZEMAX界⾯的初步认识实验⽬的:引领初学者认识ZEMAX的界⾯以及各个菜单、模块的功能,使其可以建⽴简单的光学系统模型并进⾏简单的分析,为其以后的实验打下基础。
实验内容:1、ZEMAX的功⽤:ZEMAX软件可以模拟并建⽴如反射、折射、衍射、分光、镀膜等光学系统模型,可以分析光学系统的成像质量,如各种⼏何像差、点列图、光学传递函数(MTF)、⼲涉和镀膜分析等。
此外,ZEMAX还提供优化功能来帮助设计者改善其设计,⽽公差容限分析功能可帮助设计者分析其设计在装配时所造成的光学特性误差。
2、ZEMAX提供的窗⼝类型:主窗⼝:上⽅有标题框、菜单框、⼯具框。
编辑窗⼝:有六个不同的编辑选项,即镜头编辑、评价函数编辑、多重结构编辑、公差数据编辑以及附加数据编辑和⾮序列组件编辑。
图形窗⼝:⽤来显⽰图形数据,如系统图、光学扇形图、光学传递函数(MTF)曲线等。
⽂本窗⼝:⽤于显⽰⽂本数据,如指定数据、像差系数、计算数值等。
对话框:是⼀个弹出窗⼝,⼤⼩⽆法改变。
⽤于改变选项和数据,如视场⾓、波长、孔径光阑以及⾯型等。
实验⼆单透镜的设计实验⽬的:通过单透镜模型的建⽴,使其掌握光学系统模型建⽴的⽅法,并进⾏简单的分析。
实验内容:1、设计要求:设计⼀个F/4的镜⽚,焦距为100mm,⼯作波段为可见光,光学材料⽤BK7玻璃。
2、波长的输⼊⽅法:选择“系统(System)”菜单下的“波长(Wavelengths)”,或者直接在快捷菜单中选择“Wav”。
屏幕中间会弹出⼀个“波长数据(Wavelength Data)”对话框。
ZEMAX中有许多这样的对话框,⽤来输⼊数据和提供你选择。
选择“Select”,系统默认F、d、C三个谱线的波长,单位为微⽶。
此时主波长“Primary”默认为第⼆条谱线。
3、孔径的输⼊⽅法:选择“系统”中的“通常(General)”菜单项,或者直接单击快捷键“Gen”,在出现的“通常数据(General Data)”对话框中,单击“孔径值(Aper Value)”⼀格,输⼊⼀个值:25。
投影物镜是将物体进行放大成像并投影在屏上的物镜。
投影仪的物镜、幻灯机和电影放映机上的投影物镜
统称为投影物镜。
投影物镜的作用是将光源照明的投影物体成像在较大的屏幕上,从而得到一幅放大的图像,其作用相当于倒置的照相物镜。
两者相异之处是:照相物镜为缩小成像,而投影物镜为放大成像。
描述一个投影物镜光学特性的参数是:共轭距、焦距、放大率、视场、相对孔径和工作距离。
放映物镜的像质要求,着眼于轴上点的像差(即球差和色差),轴外像差的校正主要是影响清晰度的慧差和像散。
这样的设计思想即考虑了投影物镜大孔径的特点,也考虑了它的应用特点。
简单的放映物镜是由两片透镜组成的,其中一个是正透镜,另一个是负透镜。
假如设计时注重玻璃的选择,就可以使这种结构在校正了色差和球差的基础上,同时校正正弦差。
由于轴外像差没有校正,这种结构只
能用在小视场的投影仪器中。
如果成像质量的要求高一些,可以用两个不晕的透镜组成投影物镜,这也是小视场投影仪器中使用的结构。
在投影仪器中最常用的投影物镜是匹兹万照相物镜,把它倒过来使用。
当投影仪器所要求的视场再大时,就要采用消像散的结构。
科克物镜和天塞物镜,甚至是双高斯物镜,都可以用做投影物镜。
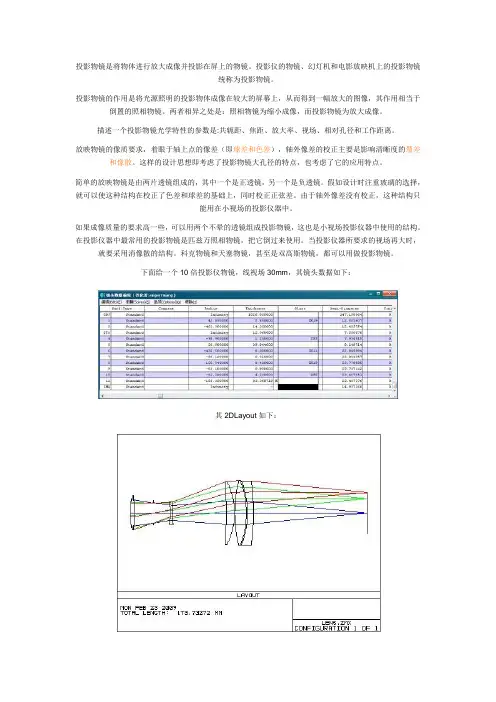
下面给一个10倍投影仪物镜,线视场30mm,其镜头数据如下:
其2DLayout如下:
投影物镜跟显微物镜一样据需要反向设计,基本上物距远小于像距时需要反向设计。
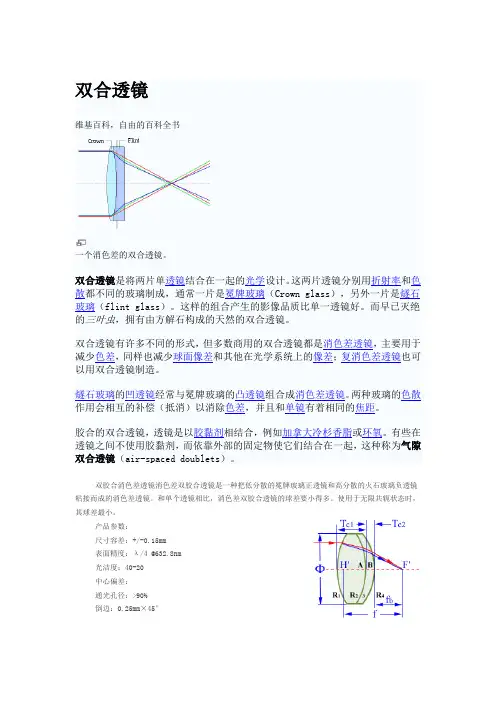
双合透镜维基百科,自由的百科全书一个消色差的双合透镜。
双合透镜是将两片单透镜结合在一起的光学设计。
这两片透镜分别用折射率和色散都不同的玻璃制成,通常一片是冕牌玻璃(Crown glass),另外一片是燧石玻璃(flint glass)。
这样的组合产生的影像品质比单一透镜好。
而早已灭绝的三叶虫,拥有由方解石构成的天然的双合透镜。
双合透镜有许多不同的形式,但多数商用的双合透镜都是消色差透镜,主要用于减少色差,同样也减少球面像差和其他在光学系统上的像差;复消色差透镜也可以用双合透镜制造。
燧石玻璃的凹透镜经常与冕牌玻璃的凸透镜组合成消色差透镜。
两种玻璃的色散作用会相互的补偿(抵消)以消除色差,并且和单镜有着相同的焦距。
胶合的双合透镜,透镜是以胶黏剂相结合,例如加拿大冷杉香脂或环氧。
有些在透镜之间不使用胶黏剂,而依靠外部的固定物使它们结合在一起,这种称为气隙双合透镜(air-spaced doublets)。
双胶合消色差透镜消色差双胶合透镜是一种把低分散的冕牌玻璃正透镜和高分散的火石玻璃负透镜粘接而成的消色差透镜。
和单个透镜相比,消色差双胶合透镜的球差要小得多。
使用于无限共轭状态时,其球差最小。
产品参数:尺寸容差:+/-0.15mm表面精度:λ/4 @632.8nm光洁度:40-20中心偏差:通光孔径:>90%倒边:0.25mm×45°曲线 C 在 P 点的密切圆和曲率半径若曲线其曲率为对于一个以参数化形式给出的平面曲线其曲率为对于隐式给出的平面曲线其曲率为也就是,的梯度的方向的散度。
最后的公式也给出了在欧几里得空间中的超曲面的平均曲率(可以差一个常数)。
对于一个以参数化形式给出的空间曲线其曲率为她会发现 C(r) = 2πr。
在弯曲的曲面上,C(r)的公式不同,P点的高斯曲率K 可以这样计算:高斯曲率在整个曲面上的积分和曲面的欧拉示性数有密切关联;参见高斯-博内定理。
平均曲率等于主曲率的和,k1+k2,除以 2。
双侧远心镜头双侧远心镜头,又称非对称远心镜头(Asymmetrical Distortion)(简称ADR ),是一种光学变焦镜头的设计类型。
与传统的对称远心镜头不同,双侧远心镜头的设计并不对称,其前后两组透镜单元的位置和数量都有所不同,因此它能够对特定的焦距范围内物体进行更好的成像。
双侧远心镜头的优点双侧远心镜头将不对称的设计特点用于光学成像,其具有以下几个优点:1. 更广的视角相比于传统的对称远心镜头,在相同的焦距下,双侧远心镜头能够获得更广的视角。
这一点对于广角摄影来说非常重要。
广角镜头的拍摄范围较大,这意味着需要可以拍摄到更广角度的镜头。
双侧远心镜头的广角能力比对称远心镜头更好,因此在广角摄影中比传统的对称远心镜头更加方便。
2. 更好的光学性能双侧远心镜头的非对称设计与双曲面透镜的原理相类似,这就使得双侧远心镜头可以避免一般远心镜头中的球差问题,从而能够获得更好的光学性能。
例如,一些双侧远心镜头在光学性能方面表现非常出色,如SIGMA Art 18-35mm F1.8 DC HSM和Tamron 17-35mm F2.8-4 Di OSD。
3. 更轻便的设计由于双侧远心镜头采用了非对称设计,镜头的结构相对于传统的对称远心镜头更为轻便。
这使得双侧远心镜头更适合作为移动拍摄的选择,例如野外摄影、远足、户外摄影等。
双侧远心镜头的缺点与优点相对应,双侧远心镜头也具有一些缺点:1. 变形问题比对称远心镜头更突出由于采用了非对称设计,所以双侧远心镜头在成像中容易产生较为明显的变形。
一些双侧远心镜头在宽端时的畸变可能达到4%以上,这也就需要后期的处理来去除这种变形。
2. 相对成本较高双侧远心镜头需要先进的制造技术和设计,使得其成本相对于传统对称远心镜头更高。
双侧远心镜头的应用双侧远心镜头的应用非常广泛,涉及到许多领域,如建筑、广告、产品、风景、旅游等。
它适用于需要同时进行静态和动态捕捉的场景,例如拍摄机动车、航拍等。
第37卷 第1期2015年2月光 学 仪 器OPTICAL INSTRUMENTSVol.37,No.1February,2015 文章编号:1005-5630(2015)01-0031-04收稿日期:2014-06-25作者简介:李 丹(1989—),女,硕士研究生,主要从事光学设计方面的研究。
E-mail:lidanwish@163.com通信作者:杨 波(1977—),男,副教授,主要从事光学及照明系统领域的研究。
E-mail:yangbo@usst.edu.cn二元光学内调焦望远物镜的设计李 丹,杨 波,舒新伟(上海理工大学光电信息与计算机工程学院,上海 200093)摘要:对内调焦望远物镜进行设计,利用二元透镜独特的色散特性,在提高成像质量的同时对传统结构进行简化。
选取合适的初始结构,通过CODE V软件对物镜进行设计、优化及像质分析,得到成像质量颇佳的系统。
在此基础上,对系统进行了调焦及优化,实现了对1.5m到无穷远物距在分划板上清晰成像的目的。
在所有变焦范围内,系统各视场在50lp/mm处的MTF值均大于0.4,且各视场的畸变均小于0.5%。
关键词:二元光学透镜;望远物镜;内调焦中图分类号:TH 743 文献标志码:A doi:10.3969/j.issn.1005-5630.2015.01.008The design for internal focusing telescope objectiveusing binary optical lensLI Dan,YANG Bo,SHU Xinwei(School of Optical-Electrical and Computer Engineering,University of Shanghai forScience and Technology,Shanghai 200093,China)Abstract:It is designed for internal focusing telescope objective,using the unique dispersioncharacteristic of binary optics lens to improving the imaging quality at the same time to simplifythe structure.Choosing an appropriate initial structure,using CODE V software,the objectiveis designed,optimized and analyzed.A fine image quality system is obtained.On this basic,the system is focused and optimized.The goal is achieved that object distance from 1.5mtoinfinity is imaging clear in the reticle.The MTF value of the system in all zooms is higher than0.4at 50lp/mm spatial frequency and the distortion is smaller than 0.5%.Keywords:binary optics lens;telescope objective;internal focusing引 言物镜是整个望远镜系统中至关重要的部分,其成像质量直接影响整个系统的成像性能。
章节内容数码镜头设计原理_基础篇第六章望远系统监视镜头的使用场合千差万别。
监视纵深范围在6米以内的镜头焦距在8mm以内;监视纵深范围在6米~十几米,镜头焦距在几十毫米; 监视纵深范围在上百米,镜头焦距就上了100毫米以上。
焦距与监视纵深范围的这种依从关系是源于在CCD上人体应占有适当比例的要求的。
对于军用夜视仪,下例的外形尺寸计算说明了应如何从简单的外形尺寸来确定更深层次的光学参数的。
下面还介召了在Zemax中以透镜为单元的追迹方法(将以透镜为单元的追迹方法辅以自动设计就可得到变焦系统有关的最初变焦曲线),介召了系统理论鉴别率计算,介召了系统的内调焦计算。
这些在系统初始结构计算,系统象差评价中都是常用的方法。
第一节实例1 外形尺寸:φ85 X 100 mm2 视场:物方在250 M处物高10 M ,象方采用1/2 英寸CCD。
3 调焦:(1) 物方50 M ~250 M ,(2) 象方采用内调焦(第二镜最大调节量1 mm)4 夜间与白天均可观查(为单色)。
另外对实物测出,两镜最近距离是95,第二镜距CCD面距离为5mm。
第二节求解思路,用CCD作为接受器,用计算机屏幕来显示,用以对军用设施进行24小时监控。
对光学系统应提出什么样的要求,才是适当的?这就是本章要讨论的问题。
先要确定监控目标的范围,例如要对50 M ~250 M纵深的物方进行监控,在270M处物高10 M(两层建筑),人要看到轮括。
50M处要看清人。
这就要求在200M 处,10M建筑要恰好充满CCD,而人占1/6 CCD尺寸,应可分辩出人的轮廓了。
在50M 处,人应占2/3 CCD 尺寸。
为了获取足够的信息,采用1/2 英寸当CCD 。
由最远物距和物高,可得到系统的最大物方视场角,再由CCD 尺寸,即可解出物镜焦距。
系统应能对50M近距调焦,由于物镜焦距与CCD尺寸由上面已确定,则50M的近距视场应等于远距视场角,从而可求出50M处线视场直径是否合于看清人的要求。
介绍所有望远光学系统设计特点公告:光学人生恭贺您新年快乐!至今没有一个光学系统是完美的。
为了平坦且清晰的成像,往往必须把光学系统设计的十分复杂。
如此一来,不但透光度变差,还得付出很高的制造成本。
因此简单的镜片组而且能保有高品质成像的光学系统是光学设计的努力目标。
一个好的光学系统都出自设计者的巧思。
它能在最简单的镜片组合下产生最佳的成像品质。
不过在许多设计中,往往会遇到球面像差与彗形像差难以取舍的窘境(天文望远镜光学与机械)。
当你能同时处理这些像差的时候,系统却又发生严重的色差。
最後好不容易解决了所有的色像差,却又发生成像的变形。
因此光学系统的设计在在考验设计者的经验与智力。
希望透过以下的天文望远镜的演进,让你了解前人的成果。
折射式望远镜系统由於白光经过透镜会有色散的现象(Dipersion),因此使得光学系统除了球面像差与彗形像差之外又多了影像不清晰的光源。
由上图可知,蓝光的折射率较大,其次为绿光,最後为红光,因此不同颜色的入射光产生,却有不同的聚焦点。
好的光学系统除了成像品质之外,还必须考虑消色差的效果。
基本上,我们在处理可见光的光路分析时,是?用蓝色的F line(486.13nm)、红色的 C line(656.27nm)与绿色的 e line(546.07nm) ?作为分析的主要光源。
要查看镜片的色差情形,可以用色散数值 V( Dispersion Number or Abbe number )。
V越大表示镜片的色散的情?越小。
V=( ne-1 ) / ( nF-nC )对於一个 D= 5公分, f=20公分的两片镜片组合,我们可以由下图的光路分析了解他们各自聚焦的一致性。
其实这就是球面像差的检测工作!D=5公分 f=20公分第一片镜片 R1=18公分 R2=-19公分中心厚度=0.84公分间隙 0.1公分第二片镜片 R3=-19公分 R4=-22公分中心厚度=0.98公分为了更清楚的说明,我们藉由(上右图)了解不同三种色光随著入射的高度(离中心的光轴),误差越?越大。
2.要求设计一个周视瞄准镜的双胶合望远物镜(加棱镜),技术要求如下:设计过程: 1.求h ,h z ,J1006.14365.7148.01'''4365.7)tan(''0621.335/5tan 58.12'/'tan 148.0502/tan 8.147.34'/tan '/'tan =⨯⨯===--==⇒==⇒===⨯==⨯=Γ=⇒=Γ==y u n J mm w f y mm h h mmh f h u D u mm D D D D uf h u z z o入入出入2.计算平行玻璃板的像差和数S 1、S 2、S 3 平行板入射光束的有关参数为:5912.0,0875.0)5t a n (,148.0-=-=-==u uu u z z根据已知条件,平行玻璃板本身参数为:64.11.5163,n 31mm,d ===υ则平行平板的初级像差为:3.列出初级像差方程式求解双胶合物镜的C W P ,,∞∞ 根据整个系统物镜的像差要求:mmL SC mm L FC m m 05.0,001.0,1.0'''=∆-==δ系统的像差和数为:0010952.000220.0)(2200438.02S '2'''3''''''''2''''1-=∆-==-=-=-=-=FC m s m L u n S y SC u n k u n S L u n δ 由于S 系统=S 物镜+S 棱镜,双胶合物镜的像差和数为:0.00128480.00238-0.001095S -0.0010750.003275-0.0022S 0.001160.00554-0.00438S =+====+=I ∏I C① 列出初级像差方程,求P,W,C00238.0n1-n -dS 0.0032765/u)(u S S 00554.0n1-S 223z 124321-====-=⨯-=u du n υ00000812.0001285.000123.0001075.00000922.00016.058.1223=⇒===⇒-=-==⇒===∏I C C h S W JW P h S P P hP S z② 由P,W,C,求C W P ,,∞∞ 由于''1,85,58.12f f h ===ϕ所以00069.005591.0)(02846.0)('23======Cf C h WW h PP ϕϕ由于望远镜物镜对无限远物平面成像,无须对平面位置再进行优化。
XX大学课程设计说明书201X/201X 学年第 1 学期}学院:信息与通信工程学院专业: XXXXXXXX学生姓名: XXXXX 学号: XXXXX课程设计题目:双胶合望远镜头设计起迄日期:20XX年12月22日~20XX年01月02日课程设计地点: XX大学5院楼513、606指导教师: XXXX 职称: 教授|目录摘要 (1)|关键词 (1)第一章课题要求课题背景 (2)设计目的 (2)设计内容和要求 (2)第二章方案分析课题名称 (3)主要数据 (3)。
设计思路 (3)实现原理 (3)主要过程 (4)第三章光学系统设计光圈参数设定 (5)视场参数设定 (5)波长设定 (6)玻璃厚度的设定 (6)…像空间的设定 (7)第四章光学系统分析2D光路分布草图 (7)标准点列图Spot Diagram (8)光路图OPD FAN (9)光线相差图RAY FAN (10)波前分布图 (11)第五章光学系统优化>光学系统调焦 (12)设置可变参数 (13)优化函数设定 (13)最终优化 (14)第六章系统优化前后比较优化后的2D草图 (15)优化后的标准点列 (15)优化后光路图 (16)$第七章心得体会心得体会 (17)摘要ZEMAX是一款多功能的光学设计软件,可建立反射、折射、绕射等光学模型,可以用来模拟、分析和辅助设计光学系统,并对光学系统进行优化。
双胶合透镜不仅有较好的横向分辨率,而且有较高的轴向分辨率,能够作为共焦3-D成像的一种理想光学元件,在光学领域得到了广泛的应用。
本次课程设计,我们将利用ZEMAX软件设计一个双胶合望远镜头,展示利用ZEMAX设计、分析和优化一个简单光学系统的过程,进一步掌握该软件。
关键词:ZEMAX 双胶合望远镜头光学系统设计分析;】第一章课题要求课题背景随着计算机技术的不断进步和发展,在光学系统的设计过程中越来越多得利用到计算机技术,其中ZEMAX就是一款应用十分广泛的的光学设计软件,具有功能完善、操作简单、准确性高、人机交互性好等特点,极大地简化了光学系统的设计过程。
设计目的:本次课程设计是在学习专业基础课和专业课工程制图基础、C程序语言设计基础、应用光学和精密仪器零件设计的基础上,主要在光学仪器、程序设计实践、光学设计计算与仿真等几个方面开展实践活动,巩固所学知识、培养动手能力。
】设计内容和要求:1) 掌握Zemax光学设计的软件的使用方法;2) 理解双胶合透镜的组成及其消色差、球差的原理;3) 设计光源的波长为,焦距为100mm,相对孔径为1:5;4) 给出透镜的具体设计参数、波前分布、结构图、评价函数、求差和点列图。
5)参考五篇相关论文。
]·第二章方案分析课题名称双胶合望远镜头设计主要数据(1)~(2)透镜的具体设计参数(3)波前分布(4)结构图(5)评价函数(6)差和点列图设计思路1、查阅相关资料学习双胶合透镜的基本构造和原理;2、了解ZEMAX光学软件的基本功能并学习该软件的基本操作;3、!4、利用ZEMAX进行镜头的初步设计并进一步熟悉该软件的使用;5、对光学系统进行进一步的分析和优化,达到所定参数要求;实现原理1、双胶合透镜的原理:单正透镜具有负球差,单负透镜具有正球差,所以单透镜是不能校正球差的。
在光焦度一定时,玻璃的阿贝数越大,色差越小,通常情况下,正透镜产生负色差,负透镜产生正色差,因此消色差的光学系统往往都是将正负透镜进行组合,以实现它们的色差互补。
消色差双胶合透镜是一种把低分散的玻璃正透镜和高分散的火石玻璃负透镜粘接而成的消色差透镜。
设计时,在蓝色(),绿色()和红色()三个波长,对分散的不同值和透镜形状进行了优化,实现了最小色差。
因此,此类透镜可在整个可见光区域使用。
其球差在设计时也进行了优化,和单个透镜相比,消色差双胶合透镜的球差要小得多。
使用于无限共轭状态时,其球差最小,并且消色差双胶合透镜都镀了可见光(400—700 nm)用宽带防反射多层膜。
2、望远镜镜头的原理:单透镜物镜色差和球差都相当严重,现代的折射望远镜常用两块或两块以上的透镜组作物镜。
其中以双透镜物镜应用最普遍。
它由相距很近的一块玻璃制成的凸透镜和一块火石玻璃制成的凹透镜组成,对两个特定的波长完全消除位置色差,对其余波长的位置色差也可相应减弱,如图1所示在满足一定设计条件时,还可消去球差和彗差。
由于剩余色差和其他像差的影响,双透镜物镜的相对口径较小,一般为1/15-1/20,很少大于1/7,可用视场也不大。
口径小于8厘米的双透镜物镜可将两块透镜胶合在一起,称双胶合物镜,留有一定间隙未胶合的称双分离物镜。
为了增大相对口径和视场,可采用多透镜物镜组。
对于伽利略望远镜来说,结构非常简单,光能损失少。
镜筒短,很轻便。
而且成正像,但倍数小视野窄,一般用于观剧镜和玩具望远镜。
对于开普勒望远镜来说,需要在物镜后面添加棱镜组或透镜组来转像,使眼睛观察到的是正像。
图1 消色差原理图主要过程%研究课题→原理分析→设计透镜参数→熟悉ZEMAX软件→利用软件设计光学系统→系统的分析和优化第三章 光学系统设计镜头数据编辑器是一个主要的电子表格,将镜头的主要数据填入就形成了镜头数据。
这些数据包括系统中每一个面的曲率半径、厚度、玻璃材料。
单透镜由两个面组成 (前面和后面) , 物平面和像平面各需要一个面,这些数据可以直接输入到电子表格中。
当镜头数据编辑器显示在显示屏时, 可以将光标移至需要改动的地方并将所需的数值由键盘输入到电子表格中形成数据。
每一列代表具有不同特性的数据, 每一行表示一个光学面 (或一个)。
移动光标可以到需要的任意行或列,向左和向右连续移动光标会使屏幕滚动,这时屏幕显示其他列的数据,如半口径,二次曲线系数,以及与所在的面的面型有关的参数。
屏幕显示可以从左到右或从与右到左滚动。
”上翻页”和”下翻页”键可以移动光标到所在列的头部或尾部。
当镜头面数足够大时,屏幕显示也可以根据需要上下滚动。
光圈参数设定先打开ZEMAX 软件,根据设计要求修改系统设定,包括系统孔径,镜头单 位,视场,和波长。
1.焦距为100mm ;2.波长为;3.光源为无穷远处;4.像空间F/﹟=4;5.前一块玻璃为BAK1,后一块玻璃为F3。
根据要求的设计参数计算物方孔径EPD 。
提供的有效焦距efl 为100mm ,像空间F/﹟=5 。
EPD efl/#F ()由公式()得物方孔径EPD 约等于20。
—如图2所示,在ZEMAX主菜单软件中,选择系统> 通用配置,在弹出的对话框中,光圈类型选择入瞳直径,光圈数值选择20,单位毫米。
图2光圈参数设定视场参数设定在ZEMAX主菜单软件中,选择系统> 视场,弹出对话框,如图3所示,视场类型选择角度,并输入三组视场数据,(0, 0), (0, 3)和 (0, 5)。
:图3 视场参数设定波长设定如图4所示,在ZEMAX主菜单软件中,选择系统> 波长,在弹出的对话框中,选择要求的波长,单击确定完成配置。
*图4 波长设定系统配置完毕,即可在LDE中输入数据。
玻璃厚度的设定添加镜面,设计要求双胶合镜头,所以添加2个镜面,如图5所示,在镜面编辑窗口中选择编辑 > 插入曲面。
曲面插入完毕,即可向镜头数据编辑窗口写入镜头数据。
设计要求第一块镜面材料BAK7第二块镜面材料为F3。
在glass窗口中写入材料的类型。
在Thickness栏中填入玻璃厚度。
图5 玻璃厚度的设定像空间的设定如图6所示,设定像空间数据,使用求解去执行设计约束,设置像空间F/#为恒定值5。
图6 像空间的设定~第四章光学系统的分析2D光路分布草图步骤:选择分析>草图>2D草图,将出现2D草图LAYOUT。
目的:显示光线的大致传播路径。
点击“生成DXF文件”按钮将产生一个2D DXF 文件,并将它存储起来。
它的文件名用“DXF 文件”处输入的文件名确定。
如图7所示,DXF文件是由弧和线组成,弧用来显示镜头面的曲率。
如果是只使用球面 (或平面)的透镜,那么弧可以完全的表示镜头。
但是,弧只能近似的表示非球面。
如果面是非球面,那么弧只有在顶点,最高点和最低点是正确的。
ZEMAX 在这三个地方用适合的弧表示确切的面。
若光线未能射入到一个面,那么在发生该错误的面光线不画出。
如够光线发生全反射,那么在发生全反射的面入射的光线画出,出射的光线不画出。
图7 2D光路分布草图标准点列图Spot Diagram>步骤:选择分析>点列图>标准,将出现标准点列图Spot Diagram。
目的:光线密度有一个依据视场数目,规定的波长数目和可利用的内存的最大值。
离焦点列图将追迹标准点列图最大值光线数目的一半光线。
列在曲线上的每个视场点的GEO 点尺寸是参考点(参考点可以是主波长的主光线,所有被追迹的光线的重心,或点集的中点)到距离参考点最远的光线的距离。
如图8所示,GEO 点尺寸是由包围了所有光线交点的以参考点为中心的圆的半径。
RMS 点尺寸是径向尺寸的均方根。
先把每条光线和参考点之间的距离的平方,求出所有光线的平均值,然后取平方根。
点列图的RMS 尺寸取决于每一根光线,因而它给出光线扩散的粗略概念。
图8 标准点列图Spot DiagramGEO点尺寸只给出距离参考点最远的光线的信息。
艾利圆环的半径是乘以主波长乘以系统的F/# ,它通常依赖于视场的位置和光瞳的方向。
对于均匀照射的环形入瞳,这是艾利圆环的第一个暗环的半径。
艾利圆环可以被随意的绘制来给出图形比例。
在点列图中,ZEMAX 不能画出拦住的光线,它们也不能被用来计算RMS 或GEO 点尺寸。
ZEMAX 根据波长权因子和光瞳变迹产生网格光线。
有最大权因子的波长使用由“Ray Density”选项设置的最多光线的网格尺寸。
有最小权因子的波长在图形中设置用来维持正确表达的较少光线的网格。
如果变迹被给定,光线网格也被变形来维持正确的光线分布。
位于点列图上的RMS 点尺寸考虑波长权因子和变迹因子。
但是,它只是基于光线精确追迹基础上的RMS 点尺寸的估算。
在某些系统中它不是很精确。
像平面上参考点的交点坐标在每个点列图下被显示。
如果是一个面被确定而不是像平面,那么该坐标是参考点在那个面上的交点坐标。
既然参考点可以选择重心,这为重心坐标的确定提供了便利的途径。
光路图 OPD FAN》步骤:选择分析>特性曲线>光路,将出现光路图OPD FAN。
目的:是显示用光瞳坐标函数表示的光程差。
垂轴刻度在图形的下端给出。
如图9所示,绘图的数据是光程差,它是光线的光程和主光线的光程的差,通常,计算以返回到系统出瞳上的光程差为参考。
每个曲线的横向刻度是归一化的入瞳坐标。
若显示所有波长,那么图形以主波长的参考球面和主光线为参照基准的。