雅马哈机械手ERCX使用说明PPT课件
- 格式:ppt
- 大小:5.35 MB
- 文档页数:8


目录1引言 (1)2 PLC的简介 (2)2.1 PLC的产生 (2)2.2 PLC的定义和特点 (2)2.2.1 PLC的定义 (2)2.2.2 PLC的特点 (2)2.3可编程控制器的主要性能指标 (3)2.4 PLC系统的组成 (3)2.4.1 PLC的硬件结构 (3)2.4.2 PLC的软件 (3)2.5 PLC的应用领域 (4)3方案设计 (6)3.1 主程序设计 (6)3.2 公用程序设计 (6)3.3 自动程序设计 (7)3.4 手动程序设计 (7)3.5 自动回原点程序设计 (8)4心得体会 (10)参考文献 (11)附录1 (12)附录2 (16)1引言机械手是工业自动化领域中经常遇到的一种控制对象。
近年来随着工业自动化的发展机械手逐渐成为一门新兴学科,并得到了较快的发展。
机械手广泛地应用与锻压、冲压、锻造、焊接、装配、机加、喷漆、热处理等各个行业。
特别是在笨重、高温、有毒、危险、放射性、多粉尘等恶劣的劳动环境中,机械手由于其显著的优点而受到特别重视。
总之,机械手是提高劳动生产率,改善劳动条件,减轻工人劳动强度和实现工业生产自动化的一个重要手段。
国内外都十分重视它的应用和发展。
可编程序控制器(PLC)是专为在工业环境下应用而设计的实时工业控制装置。
随着微电子技术、自动控制技术和计算机通信技术的飞速发展,PLC在硬件配置、软件编程、通讯联网功能以及模拟量控制等方面均取得了长足的进步,已经成为工厂自动化的标准配置之一[1]。
由于自动化可以节省大量的人力、物力等,而PLC也具有其他控制方式所不具有的特殊优越性,如通用性好、实用性强、硬件配套齐全、编程方法简单易学,因此工业领域中广泛应用PLC。
机械手在美国、加拿大等国家应用较多,如用果实采摘机械手来摘果实、装配生产线上应用智能机器人等。
我国自动化水平本身比较低,因此用PLC来控制的机械手还比较少。
2 PLC的简介2.1 PLC的产生1968年美国通用汽车公司(GM)招标要求:软连接代替硬接线;维护方便;可靠性高于继电器控制柜;体积小于继电器控制柜;成本低于继电器控制柜;有数据通讯功能;输入115V;可在恶劣环境下工作;扩展时,原系统变更要少;用户程序存储容量可扩展到4K 。



ER系列工业机器人操作手册(RCS2V1 16)修订记录目录修订记录 (i)目录 (i)前言 (vi)概述 (vi)本书常用词汇 (vi)符号约定 (vi)安全注意事项 (vii)第1 章安全................................................................................................................................... 1-11.1 保障安全 .............................................................................................................................................. 1-11.2 专门培训 .............................................................................................................................................. 1-11.3 机器人使用说明书清单....................................................................................................................... 1-11.4 操作人员安全注意事项....................................................................................................................... 1-21.5 机器人的安全注意事项....................................................................................................................... 1-31.5.1 安装及配线安全 .............................................................................................................................................. 1-31.5.2 作业区安全 ...................................................................................................................................................... 1-41.5.3 操作安全 .......................................................................................................................................................... 1-51.6 移动及转让机器人的注意事项........................................................................................................... 1-61.7 废弃机器人的注意事项....................................................................................................................... 1-6第2 章产品确认........................................................................................................................... 2-12.1 装箱内容确认....................................................................................................................................... 2-12.2 订货号确认 .......................................................................................................................................... 2-1第3 章安装................................................................................................................................... 3-13.1 搬运方法 .............................................................................................................................................. 3-13.1.1 用吊车搬运电控柜 .......................................................................................................................................... 3-13.1.2 用叉车搬运电控柜 .......................................................................................................................................... 3-13.2 安装场所和环境................................................................................................................................... 3-23.3 安装位臵 .............................................................................................................................................. 3-2第4 章配线................................................................................................................................... 4-14.1 电缆连接的注意事项........................................................................................................................... 4-14.2 供电电源 .............................................................................................................................................. 4-14.3 连接方法 .............................................................................................................................................. 4-24.3.1 连接供电电缆 .................................................................................................................................................. 4-24.3.2 连接示教编程器 .............................................................................................................................................. 4-2第5 章电源的接通与切断........................................................................................................... 5-15.1 接通主电源 .......................................................................................................................................... 5-15.1.1 接通主电源 ...................................................................................................................................................... 5-15.1.2 初始化诊断 ...................................................................................................................................................... 5-15.1.3 初始化诊断完成时的状态............................................................................................................................... 5-25.2 接通伺服电源....................................................................................................................................... 5-25.3 切断电源 .............................................................................................................................................. 5-35.3.1 切断伺服电源(急停) .................................................................................................................................. 5-35.3.2 切断主电源 ...................................................................................................................................................... 5-3第6 章动作确认........................................................................................................................... 6-1第7 章系统部件........................................................................................................................... 7-17.1 电控柜 .................................................................................................................................................. 7-17.2 电源单元 .............................................................................................................................................. 7-37.3 控制单元 .............................................................................................................................................. 7-37.4 伺服驱动单元....................................................................................................................................... 7-57.5 输入输出单元....................................................................................................................................... 7-67.5.1 耦合器EE-R00 ................................................................................................................................................ 7-67.5.2 数字输入ER-1311 ........................................................................................................................................... 7-97.5.3 数字输出ER-2341 ......................................................................................................................................... 7-127.5.4 I/O从站的安装与组网 ................................................................................................................................... 7-157.6 示教编程器 ........................................................................................................................................ 7-207.6.1 外观 ................................................................................................................................................................ 7-207.6.2 按键 ................................................................................................................................................................ 7-217.6.3 显示 ................................................................................................................................................................ 7-227.6.4 模式开关介绍 ................................................................................................................................................ 7-247.6.5 急停按钮介绍 ................................................................................................................................................ 7-257.6.6 伺服使能开关介绍 ........................................................................................................................................ 7-257.6.7 示教编程器内部的接线端子信号定义......................................................................................................... 7-267.6.8 示教编程器线缆 ............................................................................................................................................ 7-26第8 章操作说明........................................................................................................................... 8-18.1 机器人的坐标系................................................................................................................................... 8-18.1.1 坐标系种类 ...................................................................................................................................................... 8-18.1.2 关节坐标系 ...................................................................................................................................................... 8-18.1.3 直角坐标系 ...................................................................................................................................................... 8-28.1.4 工具坐标系 ...................................................................................................................................................... 8-38.2 示教 ...................................................................................................................................................... 8-48.2.1 急停的确认 ...................................................................................................................................................... 8-48.2.2 示教模式及安全性保证 .................................................................................................................................. 8-48.2.3 示教前的准备 .................................................................................................................................................. 8-48.2.4 示教的基本步骤 .............................................................................................................................................. 8-58.2.5 轨迹的确认 .................................................................................................................................................... 8-108.2.6 程序的修改 .................................................................................................................................................... 8-118.3 再现 .................................................................................................................................................... 8-128.3.1 再现前的准备 ................................................................................................................................................ 8-128.3.2 再现步骤 ........................................................................................................................................................ 8-128.3.3 停止与再启动 ................................................................................................................................................ 8-128.3.4 修改再现速度 ................................................................................................................................................ 8-14第9 章系统功能介绍................................................................................................................... 9-19.1 工程管理 .............................................................................................................................................. 9-19.1.1 新建工程或程序 .............................................................................................................................................. 9-19.1.2 删除工程或程序 .............................................................................................................................................. 9-29.1.3 重命名工程或程序 .......................................................................................................................................... 9-39.1.4 复制/粘贴工程或程序 ..................................................................................................................................... 9-39.1.5 加载/注销工程或程序 ..................................................................................................................................... 9-39.1.6 自启动程序 ...................................................................................................................................................... 9-49.2 程序编辑 .............................................................................................................................................. 9-69.2.1 新增指令 .......................................................................................................................................................... 9-69.2.2 撤销指令 .......................................................................................................................................................... 9-89.2.3 其它操作 .......................................................................................................................................................... 9-99.3 程序数据 ............................................................................................................................................ 9-129.3.1 新增变量 ........................................................................................................................................................ 9-129.3.2 标准区域变量 ................................................................................................................................................ 9-159.3.3 多边体区域变量 ............................................................................................................................................ 9-169.3.4 工具坐标系变量 ............................................................................................................................................ 9-179.3.5 用户坐标系变量 ............................................................................................................................................ 9-189.3.6 外部工具坐标系变量 .................................................................................................................................... 9-199.3.7 其它操作 ........................................................................................................................................................ 9-209.4 IO检测 ................................................................................................................................................ 9-229.5 位臵管理 ............................................................................................................................................ 9-249.6 系统日志 ............................................................................................................................................ 9-259.6.1 查看系统日志 ................................................................................................................................................ 9-259.6.2 查看和导出系统日志 .................................................................................................................................... 9-269.7 系统设臵 ............................................................................................................................................ 9-299.7.1 用户管理 ........................................................................................................................................................ 9-299.7.2 通用设臵 ........................................................................................................................................................ 9-309.7.3 高级设臵 ........................................................................................................................................................ 9-31第10 章变量介绍....................................................................................................................... 10-110.1 基本数据类型................................................................................................................................... 10-110.2 位臵数据类型................................................................................................................................... 10-310.3 系统数据类型................................................................................................................................... 10-810.4 IO数据类型 .................................................................................................................................... 10-1410.5 摆动数据类型................................................................................................................................. 10-1510.6 时钟数据类型................................................................................................................................. 10-1610.7 区域数据类型................................................................................................................................. 10-1710.8 PLC数据类型 ................................................................................................................................. 10-1810.9 码垛数据类型................................................................................................................................. 10-1910.10 SOCKET数据类型....................................................................................................................... 10-20第11 章指令介绍....................................................................................................................... 11-111.1 运动指令........................................................................................................................................... 11-111.2 控制指令......................................................................................................................................... 11-1811.3 等待指令......................................................................................................................................... 11-2211.4 IO指令 ............................................................................................................................................ 11-2311.5 设臵指令......................................................................................................................................... 11-2811.6 位臵运算指令................................................................................................................................. 11-3211.7 传送带跟随指令............................................................................................................................. 11-3311.8 位运算指令..................................................................................................................................... 11-4011.9 时钟指令......................................................................................................................................... 11-4111.10 区域指令....................................................................................................................................... 11-4211.11 视觉指令....................................................................................................................................... 11-4211.14 软浮动指令................................................................................................................................... 11-5011.15 数学运算函数............................................................................................................................... 11-5111.16 字符串指令................................................................................................................................... 11-5511.17 阵列指令....................................................................................................................................... 11-6011.18 ModbusTCP指令 .......................................................................................................................... 11-62第12 章高级功能....................................................................................................................... 12-112.1 多类型区域监控............................................................................................................................... 12-112.2 碰撞检测 .......................................................................................................................................... 12-512.3 振动抑制 .......................................................................................................................................... 12-612.4 传送带跟随....................................................................................................................................... 12-712.5 系统IP设臵................................................................................................................................... 12-1212.6 示教器升级与备份......................................................................................................................... 12-1512.6.1 示教器程序升级 ........................................................................................................................................ 12-1512.6.2 示教器程序备份 ........................................................................................................................................ 12-1812.7 控制器运行程序更新..................................................................................................................... 12-1912.7.1 控制器程序更新 ........................................................................................................................................ 12-1912.7.2 控制器程序还原 ........................................................................................................................................ 12-2012.7.3 备份导出 .................................................................................................................................................... 12-2112.7.4 工程导入 .................................................................................................................................................... 12-2312.8 一点到达功能介绍......................................................................................................................... 12-2412.9 工具坐标系标定............................................................................................................................. 12-2512.10 用户坐标系/外部工具坐标系标定.............................................................................................. 12-2912.11 外部TCP功能 ............................................................................................................................. 12-3212.12 一点对正坐标轴........................................................................................................................... 12-3412.13 伺服管理 ...................................................................................................................................... 12-3612.14 二维视觉的使用........................................................................................................................... 12-3912.15 三维视觉的使用........................................................................................................................... 12-4112.16 ModbusTCP ................................................................................................................................... 12-4412.17 锁机与解除................................................................................................................................... 12-4812.18 软浮动功能................................................................................................................................... 12-5212.19 九点标定功能............................................................................................................................... 12-5612.20 多工位预约................................................................................................................................... 12-5812.21 变位机功能................................................................................................................................... 12-6312.22 倒序执行 ...................................................................................................................................... 12-6712.23 伺服参数自调节功能................................................................................................................... 12-6812.24 跨腕部奇异功能........................................................................................................................... 12-6912.25 回零功能 ...................................................................................................................................... 12-6912.25.1 功能概述 .................................................................................................................................................. 12-6912.25.2 整体回零 .................................................................................................................................................. 12-7012.25.3 单轴回零 .................................................................................................................................................. 12-7012.26 保养提示 ...................................................................................................................................... 12-7312.27 Scara快速标定.............................................................................................................................. 12-7512.28 去限位块丢零保护功能............................................................................................................... 12-84第13 章附录............................................................................................................................... 13-113.1 示教器权限分配表........................................................................................................................... 13-113.2 ModbusTCP控制接口数据表 .......................................................................................................... 13-413.3 报警信息一览表............................................................................................................................ 13-7前言概述本文档适用于控制系统RCS2 V1.28,描述了ER系列机器人的构成及其示教控制器的操作,有助于使用者了解并能掌握ER系列机器人的操作和使用。
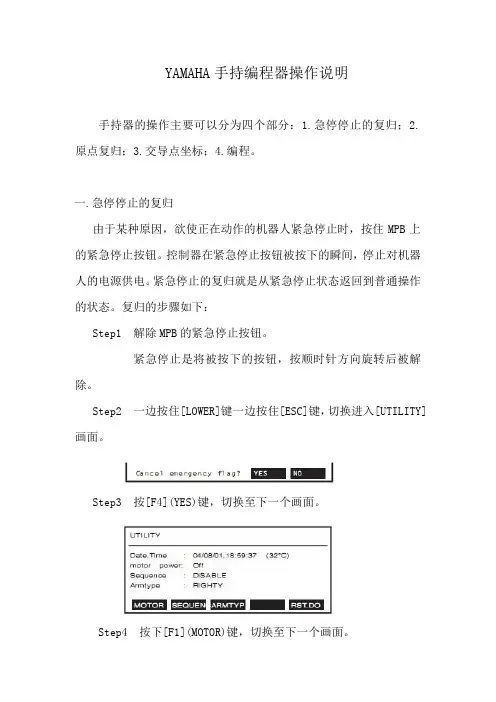
YAMAHA手持编程器操作说明手持器的操作主要可以分为四个部分:1.急停停止的复归;2.原点复归;3.交导点坐标;4.编程。
一.急停停止的复归由于某种原因,欲使正在动作的机器人紧急停止时,按住MPB上的紧急停止按钮。
控制器在紧急停止按钮被按下的瞬间,停止对机器人的电源供电。
紧急停止的复归就是从紧急停止状态返回到普通操作的状态。
复归的步骤如下:Step1 解除MPB的紧急停止按钮。
紧急停止是将被按下的按钮,按顺时针方向旋转后被解除。
Step2 一边按住[LOWER]键一边按住[ESC]键,切换进入[UTILITY]画面。
Step3 按[F4](YES)键,切换至下一个画面。
Step4 按下[F1](MOTOR)键,切换至下一个画面。
Step5 按[F1](ON)键,马达电源呈接通状态。
Step6 按[ESC]键,返回到原有模式。
二.原点复归第一次启用机器手臂时或者是在断电停止状态下对机器手臂进行了移动时需要重新进行回机械原点操作,简称为原点复归。
复归步骤如下:Step1 按[MANUAL](手动模式)键,进入如下界面。
Step2 一边按[UPER]键一边按[F13]键(RST.ABS),进入[MANUAL>RST.ABS]模式界面。
Step3 此时可以根据自己的习惯选择原点复归的方式,可以是单个轴进行复归,也可以四轴一起进行复归。
现在只介绍四轴同时进行复归运动,单轴复归操作说明请参考机器手操作说明书。
一边按住[LOWER]键和[F11](ALL)键。
进入选择界面。
Step4 按[ON]键,完成原点复归。
Step5 按[ESC]键,退出到原有模式界面。
三.交导点坐标在此处可以进行对坐标的读写,编辑。
操作步骤如下:Step1 按[MANUAL](手动模式)键,进入如下手动调试界面。
Step2 按[F1] (POINT)键,进入下一个编辑界面。
Step3 按[F1](EDIT)键可以直接通过键输入坐标点的数据,然后按[ENTER]键完成坐标的输入;或者可以按[F2](TEACH)键通过示教输入坐标点数据——直接把机械手移动到所要达到的坐标点,然后按[ENTER]键完成坐标的输入;或者直接操作控制键上的X,Y,Z,R微调键,然后按[ENTER]键完成坐标的输入;Step4 完成坐标的设定,按[ESC]键返回到主界面。