第3章 平面机构的运动分析
- 格式:ppt
- 大小:1.33 MB
- 文档页数:36

第三章平面机构的运动分析1机构运动分析包括哪些容?2对机构进行运动分析的目的是什么?3什么叫速度瞬心?4相对速度瞬心和绝对速度瞬心有什么区别?5在进行机构运动分析时,速度瞬心法的优点及局限是什么?6什么叫三心定理?7怎样确定组成转动副、移动副、高副的两构件的瞬心?怎样确定机构中不组成运动副的两构件的瞬心?8在同一构件上两点的速度和加速度之间有什么关系?9组成移动副两平面运动构件在瞬时重合点上的速度和加速度之间有什么关系?10平面机构的速度和加速度多边形有何特性?11什么叫“速度影像”和“加速度影像”,它在速度和加速度分析中有何用处?12机构运动时在什么情况下有哥氏加速度出现?它的大小及方向如何决定?13如何根据速度和加速度多边形确定构件的角速度和角加速度的大小和方向?14如何确定构件上某点法向加速度的大小和方向?15当某一机构改换原动件时,其速度多边形是否改变?其加速度多边形是否改变?16什么叫运动线图?它在机构运动分析时有什么优点?17当两构件组成转动副时,其相对速度瞬心在_________ 处;组成移动副时,其瞬心在___________________________________________________ 处;组成滑动兼滚动的高副时,其瞬心在___________ 处•18相对瞬心与绝对瞬心相同点是_______________ ,而不同点是 ______________ .19速度影像的相似原理只能用于_______________ 两点,而不能用于机构 ___________ 的各点•20速度瞬心可以定义为互相作平面相对运动的两构件上 ________________________ 的点•21 3个彼此作平面平行运动的构件共有个速度瞬心,这几个瞬心必位于•含有6个构件的平面机构,其速度瞬心共有 __________________ 个,其中_____ 个是绝对瞬心,有个相对瞬心•22在图示机构中,已知原动件1以匀角速度1沿逆时针方向转动,试确定:(1 )机构的全部瞬心;(2)构件3的速度v3 (需写岀表达式)。
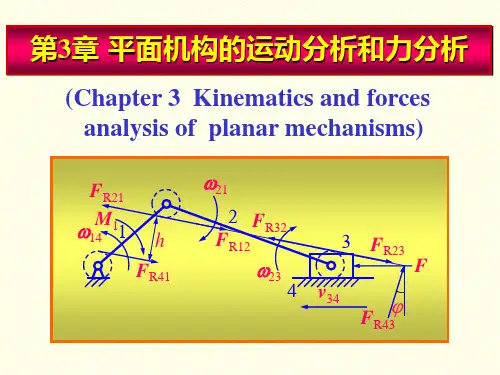
第3章 平面机构的运动分析本章关键词:速度瞬心法、矢量方程图解法、解析法。
3-1 何谓速度瞬心?相对瞬心与绝对瞬心有何异同点?[解答] (1)互作平面相对运动的两构件上瞬时速度相等的重合点称为两构件的速度瞬心,简称瞬心。
(2)区分相对瞬心与绝对瞬心关键看瞬心处的绝对速度是否为零,为零则称为绝对瞬心;否则则称为相对瞬心。
3-2 何谓三心定理?何种情况下的瞬心需用三心定理来确定?[解答] (1) 所谓三心定理,三个彼此作平面运动的构件的三个瞬心位于同一直线上。
(2)确定不通过运动副直接相连的两构件间的瞬心位置需借助三心定理。
3-3 [解答]3-4 [解答]由三心定理,求得齿轮1与齿轮3的同速重合点,也即相对瞬心13P 。
由瞬心的性质可得: l l P P P P P v μωμω361331613113==传动比 1613361331P P P P =ωω (如需尺寸直接从图上量取) 3-6题[解答] mm mm l /2=μ(1)由三心定理确定出构件2、4的等速重合点,也即相对瞬心24P 。
由瞬心性质得 l l P P P P P v μωμω241442412224== ) ( 4.5rad/s (49/109)10 2414241224顺时针=⨯==P P P P ωωs mm l v CD C /4055.4904=⨯==ω 方向如图示(2)由三心定理确定出构件1、3的等速重合点,也即绝对瞬心13P 。
在此瞬时,可将构件3视为绕点13P 转动,从而求得构件3的BC 线上速度最小的点E 。
s rad P P P P /5.25.11930102313231223=⨯==ωω 方向如图示 s mm E P v l E /3552715.2133=⨯⨯==μω 方向如图示 (3)结合(2)的分析可知,要使0=C v ,须满足C 、E 两点重合,而要满足C 、E 两点重合,只需令A 、B 、C 三点共线即可。