西门子PLC编程实例西门子综合培训plc综合实验练习
- 格式:doc
- 大小:369.50 KB
- 文档页数:23

深圳稻草人自动化培训西门子plc实验指导二之综合程序设计训练十综合设计实验一时间继电器控制Y-△三相电机降压起动控制一.实验目的1.通过电路的实际安装接线,掌握由原理图实际安装接线的知识。
2.通过实验,进一步理解三相电机降压启动的原理。
3.了解时间继电器的机构、工作原理和使用方法。
4.掌握电动机Y-△降压启动控制线路的分析方法和安装方法。
二.实验设备1.TVT-90GT实验装置一台。
2.计算机一台。
3.断路器、热继电器各1个,三相电机1台,接触器3个,熔断器5个,时间继电器1个,按钮2个。
4.连接导线若干。
三.实验原理正常运行时定子绕组接成三角形的笼形异步发动机,可采用星形—三角形降压启动方式来降低启动电流。
因功率在4kW以上的三相笼型异步电动机均为三角形接法,因此都可以采用星形—三角形降压启动方式。
启动时将电动机定子绕组接成星形,加到电动机的每相绕组上的电压为额定值的,从而减小了启动电流对电网的影响。
当转速接近额定转速时,定子绕组该接成三角形,使电动机在额定电压下正常运转。
星形—三角形降压启动线路如图3所示。
这一线路的设计思想是按时间原则控制启动过程,待启动结束后按预先整定的时间换接成三角形接法。
当启动电动机时,合上开关QF,按下启动按钮SB2,接触器KM1、KM3与时间继电器KT 的线圈同时得电,接触器KM3的主触点将电动机接成星形并经过KM1的主出电接至电源,电动机降压启动。
当KT的延时时间到,KM3线圈失电,KM2线圈得电,电动机主回路换接成三角形接法,电动机投入正常运转。
星形—三角形启动的优点在于,星形启动电流只是原来三角形接法直接启动时的1/3,启动电流约为电动机额定电流的2倍左右,转距特性差。
因而本线路适用于电动机空载或轻载启动的场合。
四.实验内容和和方法1.按图3-1放置好元器件的位置。
2.按图3-1电路原理图接好线,经指导老师检查无误后,方可进行实验。
3.设置时间继电器的时间(大约几秒钟就可以)。
实训十三八段码显示模拟控制实训一、实训目的熟悉移位、传送指令的用法。
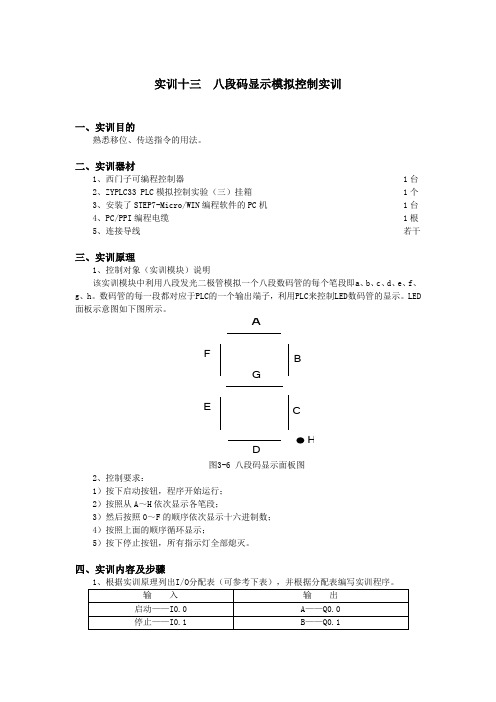
二、实训器材1、西门子可编程控制器 1台2、ZYPLC33PLC 模拟控制实验(三)挂箱 1个3、安装了STEP7-Micro/WIN 编程软件的PC 机 1台4、PC/PPI 编程电缆 1根5、连接导线 若干三、实训原理1、控制对象(实训模块)说明该实训模块中利用八段发光二极管模拟一个八段数码管的每个笔段即a 、b 、c 、d 、e 、f 、g 、h 。
数码管的每一段都对应于PLC 的一个输出端子,利用PLC 来控制LED 数码管的显示。
LED 面板示意图如下图所示。
ABCD EFGH图3-6 八段码显示面板图2、控制要求:1)按下启动按钮,程序开始运行; 2)按照从A ~H 依次显示各笔段;3)然后按照0~F 的顺序依次显示十六进制数; 4)按照上面的顺序循环显示;5)按下停止按钮,所有指示灯全部熄灭。
四、实训内容及步骤2、在断电的情况下,将编程电缆一端与PLC的编程接口相连,另一端与计算机串口连接。
3、实训接线:除了I/O分配表所列接线外,还需将PLC主机的输入输出电源部分接线主机模块M——主机模块1M 主机模块L+——主机模块1L、2L左边的按钮,生成一个新的项目。
执行菜单命令“PLC/类型”,设置PLC型号。
5、在主程序(OB1)中输入编写的实训程序(一般用梯形图编辑器)。
点击工具条中的或按钮,编译输入的程序。
如程序有错,输出窗口会显示错误信息。
用鼠标双击错误信息可以在程序编辑器中显示相应出错程序段以便修改。
6、打开电源,将PLC上的模式开关拨到STOP位置。
执行菜单命令“文件/下载”或工具条中的按钮,选择下载的块,执行下载。
7、下载成功后将PLC的模式开关拨到“RUN”位置,“RUN”指示灯亮,程序开始运行。
观察运行的结果,若结果与控制要求不符,则根据观察到的现象修改程序,重新下载进行调试,直至满足控制要求为止。
五、实训思考题及答案改变循环扫描时间,观察LED输出变化。
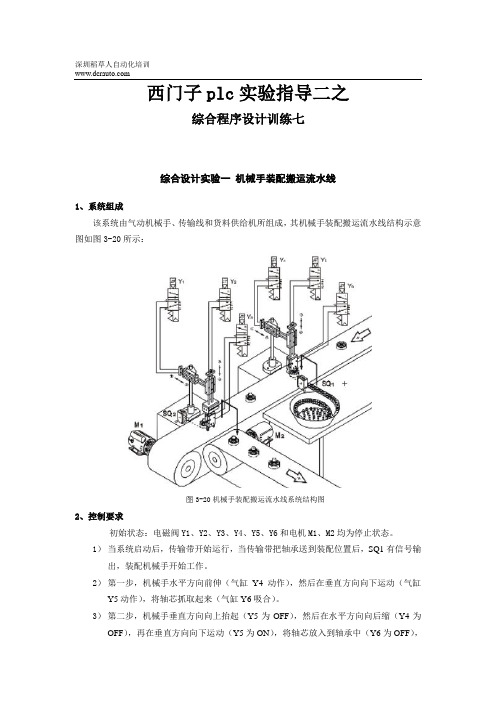
深圳稻草人自动化培训西门子plc实验指导二之综合程序设计训练七综合设计实验一机械手装配搬运流水线1、系统组成该系统由气动机械手、传输线和货料供给机所组成,其机械手装配搬运流水线结构示意图如图3-20所示:图3-20机械手装配搬运流水线系统结构图2、控制要求初始状态:电磁阀Y1、Y2、Y3、Y4、Y5、Y6和电机M1、M2均为停止状态。
1)当系统启动后,传输带开始运行,当传输带把轴承送到装配位置后,SQ1有信号输出,装配机械手开始工作。
2)第一步,机械手水平方向前伸(气缸Y4动作),然后在垂直方向向下运动(气缸Y5动作),将轴芯抓取起来(气缸Y6吸合)。
3)第二步,机械手垂直方向向上抬起(Y5为OFF),然后在水平方向向后缩(Y4为OFF),再在垂直方向向下运动(Y5为ON),将轴芯放入到轴承中(Y6为OFF),机械手垂直方向向上抬起(Y5为OFF),系统完成机械手装配工作。
4)系统完成装配后,当到料传感器SQ2检测到信号时(SQ2灯亮),搬运机械手开始动作。
首先,机械手垂直方向下降到一定位置(Y2为ON),然后抓手吸合(Y3为ON),接着机械手抬起(Y2为OFF),机械手向前运动(Y1为ON),然后下降(Y2为ON),机械手张开(Y3为OFF),接着机械手抬起(Y2为OFF),机械手向后拉回(Y1为OFF),电机M2开始动作,将货物送出。
接下来,完成下一轮的装配任务。
5) 系统控制的时序过程要求:SQ1有信号输出,传输带M1“OFF”,装配机械手Y4“ON”,延时4S后Y5“ON”,再延时4S后Y6“ON”,延时4S后Y5为“OFF”,延时4S后Y4为“OFF”,延时4S后Y5为“ON”,延时4S后Y6为“OFF”,延时4S后Y5为“OFF”。
即装配机械手从高频震荡原料供给器取出轴芯装到轴承上的任务,装完后传输带M1“ON”继续运行。
当轴承到搬运位置上时,SQ2有信号输出,搬运机械手Y2“ON”,延时4S后Y3为“ON”,延时4S后Y2为“OFF”,延时4S后Y1为“ON”,延时4S后Y2为“ON”,延时4S后Y3为“OFF”,延时4S后Y2为“OFF”,延时4秒后,机械手二向后拉回(Y1为OFF)。
西门子可编程控制器实验与指导实验二实验七传送指令实验一、实验目的1.掌握传送指令的设置。
2.了解指令是如何传送的。
二、实验内容1.字节、字、双字或者实数传送字节传送(MOVB)、字传送(MOVW)、双字传送(MOVD)和实数传送指令在不改变原值的情况下将IN是的值传送到OUT。
对于IEC传送指令,输入和输出的数据类型可以不同,但数据长度必须相同。
使ENO=0的错误条件:0006(间接寻址)2.字节立即传送(读和写)字节立即传送指令允许您在物理I/O和存储器之间立即传送一个字节数据。
字节立即读(BIR)指令读物理输入(IN),并将结果存入内存地址(OUT),但过程映像寄存器并不刷新。
字节立即写指令(BIW)从内存地址(IN)中读取数据,写入物理输出(OUT),同时刷新相应的过程映像区。
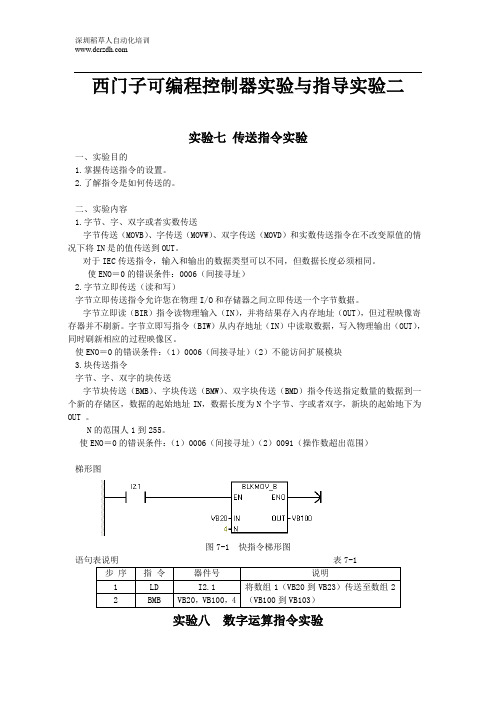
使ENO=0的错误条件:(1)0006(间接寻址)(2)不能访问扩展模块3.块传送指令字节、字、双字的块传送字节块传送(BMB)、字块传送(BMW)、双字块传送(BMD)指令传送指定数量的数据到一个新的存储区,数据的起始地址IN,数据长度为N个字节、字或者双字,新块的起始地下为OUT 。
N的范围人1到255。
使ENO=0的错误条件:(1)0006(间接寻址)(2)0091(操作数超出范围)梯形图图7-1 快指令梯形图语句表说明表7-1步序指令器件号说明1 LD I2.1 将数组1(VB20到VB23)传送至数组2(VB100到VB103)2 BMB VB20,VB100,4实验八数字运算指令实验一、实验目的1.掌握数学运算指令中的加、减、乘、除指令的设置。
2.进一步熟悉PLC程序的输入。
二、实验内容数学运算指令:加、减、乘、除指令加法减法1N1+1N2=OUT 1N1-1N1=OUT LAD和FBD1N1+OUT=OUT OUT-1N1=OUT STL整数加法(+1)或者整数减法(-1)指令,将两个16位整数相加或者相减,产生一个16位结果。

西门子可编程控制器实验与指导实验一实验一 比较指令实验一、实验目的1.掌握数值比较的使用方法。
2.进一步熟悉PLC 的输入。
二、实验内容数值比较比较指令用于比较两个数值IN1=IN2 IN1﹥=IN2 IN1﹤=IN2IN1﹥IN2 IN1﹤IN2 IN1﹤﹥IN2字节比较操作是无符号的,整数比较操作是有符号的,双字比较操作是有符号的,实数比较操作是有符号的。
对于LAD 和FBD :当比较结果为真时,比较指令使能点闭合(LAD )或者输出接通(FBD )。
对于STL :当比较结果为真时,将栈顶值置1。
当你使用IEC 比较指令时,你可以使用各种数据类型作为输入,但是,两个输入的数据类型必须一致。
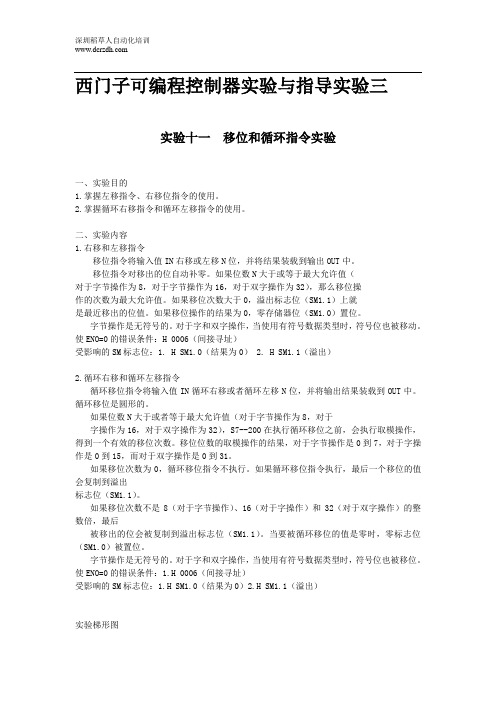
梯形图图3-1语句表说明 表3-1 步 序指 令 器件号 说明 1LD I0.0 调节模拟调节电位器0来改变SMB28的数值。
当SMB28中的数值小于等于50时,Q0.0输出 当SMB28中的数值大于等于150时,Q0.1输出 当比较结果为真时,状态指示器点亮。
2LPS 3AB ﹤﹦ SMB28,50 4= Q0.0 5LPP 6AB ﹥= SMB28,150 7 = Q0.1实验二计数/高速计数指令实验一、实验目的1.掌握计数器指令的使用和设置2.了解高速计数器不同的操作模式下,模块的功能。
3.进一步的熟悉PLC的指令输入。
二、实验内容1.增计数器增计数指令(CTU)从当前计数值开始,在每一个(CU)输入状态从低到高时递增计数,当CXX的当前值大于等于预置值PV时,计数器位CXX置位,当复位端(R)接通或者执行复位指令后,计数器被复位,当它达到最大值(32,767)后,计数器停止计数。
STL操作:(1)复位输入:栈顶(2)计数输入:其值被装载在第二个堆栈中。
2.减计数器减计数指令(CTD)从当前计数值开始,在每一个(CD)输入状态的低到高时递减计数。
当CXX的当前值等于0时,计数器位CXX置位。
当装载输入端(LD)接通时,计数器的当前值设为预置值PV。
西门子可编程控制器实验与指导实验三实验十一移位和循环指令实验一、实验目的1.掌握左移指令、右移位指令的使用。
2.掌握循环右移指令和循环左移指令的使用。
二、实验内容1.右移和左移指令移位指令将输入值IN右移或左移N位,并将结果装载到输出OUT中。
移位指令对移出的位自动补零。
如果位数N大于或等于最大允许值(对于字节操作为8,对于字节操作为16,对于双字操作为32),那么移位操作的次数为最大允许值。
如果移位次数大于0,溢出标志位(SM1.1)上就是最近移出的位值。
如果移位操作的结果为0,零存储器位(SM1.0)置位。
字节操作是无符号的。
对于字和双字操作,当使用有符号数据类型时,符号位也被移动。
使ENO=0的错误条件:H 0006(间接寻址)受影响的SM标志位:1. H SM1.0(结果为0) 2. H SM1.1(溢出)2.循环右移和循环左移指令循环移位指令将输入值IN循环右移或者循环左移N位,并将输出结果装载到OUT中。
循环移位是圆形的。
如果位数N大于或者等于最大允许值(对于字节操作为8,对于字操作为16,对于双字操作为32),S7--200在执行循环移位之前,会执行取模操作,得到一个有效的移位次数。
移位位数的取模操作的结果,对于字节操作是0到7,对于字操作是0到15,而对于双字操作是0到31。
如果移位次数为0,循环移位指令不执行。
如果循环移位指令执行,最后一个移位的值会复制到溢出标志位(SM1.1)。
如果移位次数不是8(对于字节操作)、16(对于字操作)和32(对于双字操作)的整数倍,最后被移出的位会被复制到溢出标志位(SM1.1)。
当要被循环移位的值是零时,零标志位(SM1.0)被置位。
字节操作是无符号的。
对于字和双字操作,当使用有符号数据类型时,符号位也被移位。
使ENO=0的错误条件:1.H 0006(间接寻址)受影响的SM标志位:1.H SM1.0(结果为0)2.H SM1.1(溢出)实验梯形图图11-1 移位和循环指令梯形图语句表说明表11-1 步序指令器件号说明1 LD I4.02 RRW AC0,23 SLW VW200,3指令说明实验十二字符串指令实验一、实验目的1.掌握字符串指令的设置。
PLC综合实验练习三实验一四层电梯的模拟控制一、实验目的用PLC构成四层电梯控制系统二、实验内容1.控制要求把可编程控制器拨向RUN后,按其他按钮都无效,只有按SQ1,才有效E1亮,表示电梯原始层在一层。
电梯停留在一层:1.按SB6或SB7(SB2)或SB6、SB7(SB2),电梯上升,按SQ2、E1灭,E2亮,上升停止。
2.按SB8或SB9(SB3)或SB8、SB9(SB3),电梯上升,按SQ3无反应,应先按SQ2、E1灭,E2亮,电梯仍上升,再按SQ3、E2灭,E3亮,电梯停止。
3.按SB10(SB4),电梯上升,按SQ4无反应,应先按SQ2、E1灭E2亮,电梯仍上升,再按SQ3、E2灭,E3亮,电梯仍上升,再按SQ4、E3灭,E4亮,电梯停止。
4.按SB6、SB8或SB6、SB8、SB3或SB6、SB3,电梯上升,按SQ2、E1灭,E2亮,电梯仍上升,按SQ3、E2灭,E3亮,电梯停止2秒后下降,再按SQ2、E3灭,E2亮,电梯停止。
5.按SB6、SB8、SB2或SB6、SB8、SB2、SB3或SB6、SB2、SB3,电梯上升,按SQ2,E1灭,E2亮,电梯停止2秒后上升,按SQ3,E2灭,E3亮,电梯停止2秒后下降,再按SQ2,E3灭,E2亮,电梯停止。
6.按SB6、SB9或SB6、SB9、SB3电梯上升,按SQ2,E1灭,E2亮,电梯仍上升,按SQ2,E2灭,E3亮,电梯停止2秒后上升,再按SQ4,E3灭,E4亮,电梯停止2秒后下降。
按SQ3,E4灭,E3亮,电梯仍下降,按SQ2,E3灭,E2亮,电梯停止。
7.按SB6、SB9、SB2或SB6、SB9、SB2、SB3,电梯上升,按SQ2,E1灭,E2亮,电梯停止2秒后上升,按SQ3,E2灭,E3亮,电梯停止2秒后上升,再按SQ4,E3灭,E4亮,电梯停止2秒后下降。
按SQ3,E4灭,E3亮,电梯仍下降,按SQ2,E3灭,E2亮,电梯停止。
西门子综合培训plc综合实验练习实验一数码显示的模拟控制一、实验目的用PLC构成数码显示控制系统二、实验内容1.控制要求A→B→C→D→E→F→G→H→ABCDEF→BC→ABDEG→ABCDG→BCFG→ACDFG→ACDEFG→ABC →ABCDEFG→ABCDFG→A→B→C ……循环下去2.I/O分配输入输出起动按钮SB1:I0.0 A:Q0.0 E:Q0.4停止按钮SB2:I0.1 B:Q0.1 F:Q0.5C:Q0.2 G:Q0.6D:Q0.3 H:Q0.73.按图所示的梯形图输入程序。
图2-1 数码显示控制示意图实验二天塔之光的模拟控制一、实验目的用PLC构成天塔之光控制系统二、实验内容1控制要求L12→L11→L10→L8→L1→L1、L2、L9→L1、L5、L8→L1、L4、L7→L1、L3、L6→L1→L2、L3、L4、L5→L6、L7、L8、L9→L1、L2、L6→L1、L3、L7→L1、L4、L8→L1、L5、L9→L1→L2、L3、L4、L5→L6、L7、L8、L9→L12→L11→L10 ……循环下去2I/O分配输入输出起动按钮SB1:I0.0 L1:Q0.0 L7:Q0.6停止按钮SB2:I0.1 L2:Q0.1 L8:Q0.7L3:Q0.2 L9:Q1.0L4:Q0.3 L10:Q1.1L5:Q0.4 L11:Q1.2L6:Q0.5 L12:Q1.3 3.按图所示的梯形图输入程序。
图2-1 天塔之光控制示意图实验三交通灯的模拟控制一、实验目的用PLC构成交通灯控制系统二、实验内容1.控制要求起动后,南北红灯亮并维持25s。
在南北红灯亮的同时,东西绿灯也亮,1s后,东西车灯即甲亮。
到20s时,东西绿灯闪亮,3s后熄灭,在东西绿灯熄灭后东西黄灯亮,同时甲灭。
黄灯亮2s后灭东西红灯亮。
与此同时,南北红灯灭,南北绿灯亮。
1s后,南北车灯即乙亮。
南北绿灯亮了25s后闪亮,3s后熄灭,同时乙灭,黄灯亮2s后熄灭,南北红灯亮,东西绿灯亮,循环。
深圳稻草人自动化培训西门子plc实验指导二之综合程序设计训练十一综合设计实验二十二、变频器控制异步电机实验一、实验目的:1、通过对变频器控制异步电机的实验,了解变频器的工作原理及使用。
二、实验步骤:2.1 变频器控制异步电机主电路接法西门子MicroMaster420变频器简称(MM420)是全新一代模块化设计的多功能标准变频器。
它拥有友好的用户界面、全新的IGBT技术、强大的通讯能力、精确的控制性能、和高可靠性。
西门子MM420通用型变频器支持单相电源(如图1所示)和三相电源(如图2所示)两种接线方式。
图1 单相电源接线示意图图2 三相电源接线示意图本实验中采用图2所示的三相电源接线方式,接线步骤如下:1)异步电机绕组接线异步电机的绕组接线有△型接线方式和Y型接线方式。
绕组的不同接线方式决定了异步电机的额定工作电压、额定工作电流的不同。
以本实验提供的异步电机为例,△接线方式和Y型接线方式分别对应异步电机的额定工作电压380V/660V,额定工作电流0.83A/0.48A。
本实验可以跟据需要,随意选择异步电机的绕组接线方式,具体接线方式查看异步电机铭牌。
2)主电路接线选三根红线连接三相电源和变频器的三相输入,另选三根红线连接变频器的三相输出和异步电机的三相绕组。
电源地PE、变频器地PE、异步电机地PE通过2条黄线连接。
注:变频器没有主电源开关,因此,接线完毕无误后,即可接通电源,此时变频器带电,BOP操作面板有显示,变频器的输出处于锁定状态。
异步电机不会立即运行,直到按下变频器BOP操作面板上的运行(RUN)键,变频器的输出才解锁,有输出。
2.3变频器参数设定(操作面板BOP说明参见2.5操作面板功能说明、使用方法参见2.6变频器参数设置参考)变频器必须设置相关参数才能对异步电机进行控制,参数包括异步电机的额定电压,额定电流,额定转速等。
这些参数设置的必要性不但体现在异步电机的控制效果上,还能保证异步电机的安全运行。
西门子综合培训plc综合实验练习实验一数码显示的模拟控制一、实验目的用PLC构成数码显示控制系统二、实验内容1.控制要求A→B→C→D→E→F→G→H→ABCDEF→BC→ABDEG→ABCDG→BCFG→ACDFG→ACDEFG→ABC →ABCDEFG→ABCDFG→A→B→C ……循环下去2.I/O分配输入输出起动按钮SB1:I0.0 A:Q0.0 E:Q0.4停止按钮SB2:I0.1 B:Q0.1 F:Q0.5C:Q0.2 G:Q0.6D:Q0.3 H:Q0.73.按图所示的梯形图输入程序。
图2-1 数码显示控制示意图实验二天塔之光的模拟控制一、实验目的用PLC构成天塔之光控制系统二、实验内容1控制要求L12→L11→L10→L8→L1→L1、L2、L9→L1、L5、L8→L1、L4、L7→L1、L3、L6→L1→L2、L3、L4、L5→L6、L7、L8、L9→L1、L2、L6→L1、L3、L7→L1、L4、L8→L1、L5、L9→L1→L2、L3、L4、L5→L6、L7、L8、L9→L12→L11→L10 ……循环下去2I/O分配输入输出起动按钮SB1:I0.0 L1:Q0.0 L7:Q0.6停止按钮SB2:I0.1 L2:Q0.1 L8:Q0.7L3:Q0.2 L9:Q1.0L4:Q0.3 L10:Q1.1L5:Q0.4 L11:Q1.2L6:Q0.5 L12:Q1.3 3.按图所示的梯形图输入程序。
图2-1 天塔之光控制示意图实验三交通灯的模拟控制一、实验目的用PLC构成交通灯控制系统二、实验内容1.控制要求起动后,南北红灯亮并维持25s。
在南北红灯亮的同时,东西绿灯也亮,1s后,东西车灯即甲亮。
到20s时,东西绿灯闪亮,3s后熄灭,在东西绿灯熄灭后东西黄灯亮,同时甲灭。
黄灯亮2s后灭东西红灯亮。
与此同时,南北红灯灭,南北绿灯亮。
1s后,南北车灯即乙亮。
南北绿灯亮了25s后闪亮,3s后熄灭,同时乙灭,黄灯亮2s后熄灭,南北红灯亮,东西绿灯亮,循环。
2.I/O分配输入输出起动按钮SB1:I0.0 南北红灯:Q0.0 东西红灯:Q0.3南北黄灯:Q0.1 东西黄灯:Q0.4南北绿灯:Q0.2 东西绿灯:Q0.5甲车灯: Q0.7 乙车灯:Q0.63.按图所示的梯形图输入程序。
图3-1 交通灯控制示意图实验四四节传送带的模拟控制一、实验目的用PLC构成四节传送带控制系统二、实验内容1.控制要求起动后,先起动最末的皮带机,1s后再依次起动其它的皮带机;停止时,先停止最初的皮带机,1s后再依次停止其它的皮带机;当某条皮带机发生故障时,该机及前面的应立即停止,以后的每隔1s顺序停止;当某条皮带机有重物时,该皮带机前面的应立即停止,该皮带机运行1s后停止,再1s后接下去的一台停止,依此类推2.I/O分配输入输出起动按钮SB1:I0.0 M1:Q0.1停止按钮SB2:I0.5 M2:Q0.2负载或故障A:I0.1 M3:Q0.3负载或故障B:I0.2 M4:Q0.4负载或故障C:I0.3负载或故障D:I0.43.按图所示的梯形图输入程序。
4.调试并运行程序。
图4-1 四节传送带控制示意图实验五装配流水线的模拟控制一、实验目的用PLC构成装配流水线控制系统二、实验内容1.控制要求起动后,再按一下移位,将按以下规律显示:D→E→F→G→A→D→E→F→G→B→D→E →F→G→C→D→E→F→G→H→D→E→F→G→A……循环,D、E、F、G分别是用来传送的,A 是操作1,B是操作2,C是操作3,H是仓库。
2.I/O分配输入输出起动按钮SB1:I0.0 A:Q0.0 E:Q0.4复位按钮SB2:I0.1 B:Q0.1 F:Q0.5移位按钮SB3:I0.2 C:Q0.2 G:Q0.6D:Q0.3 H:Q0.73.按图所示的梯形图输入程序。
4.调试并运行程序。
图5-1 装配流水线控制示意图实验六液体混合的模拟控制一、实验目的用PLC构成液体混合控制系统二、实验内容1.控制要求按下起动按钮,电磁阀Y1闭合,开始注入液体A,按L2表示液体到了L2的高度,停止注入液体A。
同时电磁阀Y2闭合,注入液体B,按L1表示液体到了L1的高度,停止注入液体B,开启搅拌机M,搅拌4s,停止搅拌。
同时Y3为ON,开始放出液体至液体高度为L3,再经2s停止放出液体。
同时液体A注入。
开始循环。
按停止按扭,所有操作都停止,须重新启动。
2.I/O分配输入输出起动按钮SB1:I0.0 Y1:Q0.1停止按钮SB2:I0.4 Y2:Q0.2L1按钮:I0.1 Y3:Q0.3L2按钮:I0.2 M:Q0.4L3按钮:I0.33.按图所示的梯形图输入程序。
图6-1 液体混合控制示意图实验七机械手的模拟控制一、实验目的用PLC构成机械手控制系统二、实验内容1.控制要求按起动后,传送带A运行直到按一下光电开关才停止,同时机械手下降。
下降到位后机械手夹紧物体,2s后开始上升,而机械手保持夹紧。
上升到位左转,左转到位下降,下降到位机械手松开,2s后机械手上升。
上升到位后,传送带B开始运行,同时机械手右转,右转到位,传送带B停止,此时传送带A运行直到按一下光电开关才停止……循环2.I/O分配输入输出起动按钮SB1:I0.0 上升YV1:Q0.1停止按钮SB2:I0.5 下降YV2:Q0.2上升限位SQ1:I0.1 左转YV3:Q0.3下降限位SQ2:I0.2 右转YV4:Q0.4左转限位SQ3:I0.3 夹紧YV5:Q0.5右转限位SQ4:I0.4 传送带A:Q0.6光电开关 PS: I0.6 传送带B:Q0.73.按图所示的梯形图输入程序。
4.调试并运行程序。
图7-1 机械手控制示意图实验八三层电梯的模拟控制一、实验目的用PLC构成三层电梯控制系统二、实验内容1.控制要求把可编程控制器拨向RUN后,按其它按扭都无效,只有按SQ1,才有效E1亮,表示电梯原始层在一层。
电梯停留在一层:1. 按SB5或SB6(SB2)或SB5,SB6(SB2),电梯上升,按SQ2,E1灭,E2亮,上升停止。
2. 按SB7(SB3),电梯上升,按SQ3无反应,应先按SQ2,E1灭,E2亮,电梯仍上升,再按SQ3,E2灭,E3亮,电梯停止。
3.按SB5,SB7(SB3) ,电梯上升,按SQ2, E1灭,E2亮,电梯仍上升,按SQ3,E2灭,E3亮,电梯停止2秒后下降,按SQ2,E3灭,E2亮,电梯停止。
4.按SB6(SB2),SB7(SB3) ,电梯上升,按SQ2, E1灭,E2亮,电梯停止2秒后上升,按SQ3,E2灭,E3亮,电梯停止。
5.按SB5,SB6(SB2),SB7(SB3) ,电梯上升,按SQ2, E1灭,E2亮,电梯停止2秒后上升,按SQ3,E2灭,E3亮,电梯停止2秒后下降,按SQ2,E3灭,E2亮,电梯停止。
电梯停留在二层:1. 按SB7(SB3),电梯上升,反方向呼叫无效,按SQ3,E2灭,E3亮,电梯停止。
2.按SB3(SB1),电梯下降,反方向呼叫无效,按SQ1,E2灭,E1亮, 电梯停止。
电梯停留在三层的情况跟停留在一层的情况类似。
2.I/O分配输入输出内呼一层SB1:I0.1 一层指示灯E1:Q0.1内呼二层SB2:I0.2 二层指示灯E2:Q0.2内呼三层SB3:I0.3 三层指示灯E3:Q0.3一层上呼SB4:I0.4 一层呼叫灯E4:Q0.4二层下呼SB5:I0.5 二层向下呼叫灯E5:Q0.5二层上呼SB6:I0.6 二层向上呼叫灯E6:Q0.6三层下呼 SB7:I0.7 三层呼叫灯E7:Q0.7一层到位开关SQ1:I1.0 轿厢下降KM1:Q1.0二层到位开关SQ2:I1.1 轿厢上升KM2:Q1.1三层到位开关SQ3:I1.23.按图所示的梯形图输入程序。
4.调试并运行程序。
实验九水塔水位的模拟控制一、实验目的用PLC构成水塔水位控制系统二、实验内容1.控制要求按下SB4,水池需要进水,灯L2亮;直到按下SB3,水池水位到位,灯L2灭;按SB2,表示水塔水位低需进水,灯L1亮,进行抽水;直到按下SB1,水塔水位到位,灯L1灭,水塔放完水后重复上述过程即可。
2.I/O分配输入输出SB1:I0.1 L1:Q0.1SB2:I0.2 L2:Q0.2SB3:I0.3SB4:I0.43.按图所示的梯形图输入程序。
4.调试并运行程序。
图10-1 水塔水位控制示意图实验十五相步进电机的模拟控制一、实验目的用PLC构成五相步进电机控制系统二、实验内容1.控制要求按下启动按钮SB1,A相通电(A亮)→B相通电(B亮)→C相通电(C亮)→D相通电(D亮)→E相通电(E亮)→A→AB→B→BC→C→CD→D→DE→E→EA→A→B……循环下去。
按下停止按扭SB2,所有操作都停止需重新起动。
2.I/O分配输入输出起动按钮SB1:I0.0 A:Q0.1 D:Q0.4停止按钮SB2:I0.1 B:Q0.2 E:Q0.5C:Q0.33.按图所示的梯形图输入程序。
4.调试并运行程序。
图15-1 五相步进电机控制示意图实验十一Y/△换接起动的模拟控制一、实验目的用PLC构成Y/△换接起动控制系统。
二、实验内容1.控制要求按下启动按钮SB1,电动机运行,U1、V1、W1亮,表示是Y型起动,2s后,U1、V1、W1灭,U2、V2、W2亮表示△型起动。
按下停止按钮SB2,电动机停止运行。
2.I/O分配输入输出起动按钮SB1:I0.0 U1:Q0.0 U2:Q0.3停止按钮SB2:I0.1 V1:Q0.1 V2:Q0.4W1:Q0.2 W2:Q0.53.按图所示的梯形图输入程序。
4.调试并运行程序。
图11-1Y/△换接起动控制示意图实验十二扎钢机的模拟控制一、实验目的用PLC构成扎钢机控制系统。
二、实验内容1.控制要求当起动按钮按下,电动机M1、M2运行,按S1表示检测到物件,电动机M3正转,即M3F亮。
再按S2,电动机M3反转,即M3R亮,同时电磁阀Y1动作。
再按S1,电动机M3正转,重复经过三次循环,再按S2时,则停机一段时间(3s),取出成品后,继续运行,不需要按起动。
当按下停止按钮时,必须按起动后方可运行。
必须注意不先按S1,而按S2将不会有动作。
2.I/O分配输入输出起动按钮SB1:I0.0 M1:Q0.0 M3(F):Q0.2停止按钮SB2:I0.3 M2:Q0.1 M3R:Q0.3S1按钮:I0.1 Y1:Q0.4S2按钮:I0.23.按图所示的梯形图输入程序。
4.调试并运行程序。
图12-1 扎钢机控制示意图实验十三邮件分拣的模拟控制一、实验目的用PLC构成邮件分拣控制系统二、实验内容1.控制要求XcX D X E X F用拨码开关输入,当X C X D X E X F取值不是1、2、3、4、5(0001、0010、0011、0100、0101)时,L1闪亮表示出错,按停止按钮无效。