第八章 蜗杆传动
- 格式:doc
- 大小:120.01 KB
- 文档页数:16
蜗杆传动课件蜗杆传动课件蜗杆传动是一种常见的机械传动方式,它通过蜗杆和蜗轮之间的啮合来实现转动传递。
在工业领域中,蜗杆传动广泛应用于各种机械设备中,如起重机、输送机、搅拌机等。
本文将介绍蜗杆传动的原理、特点以及应用。
一、蜗杆传动的原理蜗杆传动是一种通过蜗杆和蜗轮之间的啮合来实现转动传递的机械传动方式。
蜗杆是一种螺旋形状的轴,蜗轮则是一个具有螺旋槽的圆盘。
当蜗杆旋转时,它的螺旋形状会使蜗轮产生旋转运动。
由于蜗杆的斜面角度较小,蜗轮的转速相对较低,但扭矩较大。
这使得蜗杆传动适用于需要大扭矩和较低转速的场合。
二、蜗杆传动的特点1. 大传动比:蜗杆传动的传动比可以达到较大的数值,通常在10:1至60:1之间。
这使得蜗杆传动在一些需要较大减速比的设备中非常实用。
2. 紧凑结构:由于蜗杆传动的传动比较大,所以可以通过较小的尺寸实现较大的减速比。
这使得蜗杆传动在空间有限的场合中非常适用。
3. 自锁性:蜗杆传动具有自锁性,即在没有外力作用下,蜗杆传动可以防止被传动部件的逆转。
这使得蜗杆传动在一些需要防止逆转的场合中非常有用,如起重机的升降装置。
4. 传动效率较低:由于蜗杆传动的摩擦损失较大,所以传动效率相对较低。
通常情况下,蜗杆传动的传动效率在50%至80%之间。
因此,在对传动效率要求较高的场合中,蜗杆传动可能不是最佳选择。
三、蜗杆传动的应用1. 起重机:蜗杆传动广泛应用于各种起重机中,如桥式起重机、门式起重机等。
蜗杆传动的大传动比和自锁性使得起重机的升降装置更加安全可靠。
2. 输送机:蜗杆传动也常用于输送机中,用于驱动输送带或链条的运动。
蜗杆传动的紧凑结构和大传动比使得输送机的传动装置更加节省空间且具有较大的减速比。
3. 搅拌机:蜗杆传动还广泛应用于各种搅拌机中,如混凝土搅拌机、食品搅拌机等。
蜗杆传动的大扭矩和较低转速使得搅拌机可以更好地完成搅拌工作。
总结蜗杆传动是一种常见的机械传动方式,它通过蜗杆和蜗轮之间的啮合来实现转动传递。
《机械设计基础》课程复习参考题2013年元月第一章概论一、填空题1、在完整的机构中由三类构件组成,分别为、和机架。
2、机械装置中是运动的单元体,是制造的单元体。
3、机械零件由于某种原因丧失正常工作能力称之为。
4、机器和机构总称为。
二、简答题1、机械零件常见的失效形式有哪些?2、机械零件常用的材料有哪些?第二章平面机构的运动简图及自由度一、填空题1、构件的自由度是指。
2、两构件之间以线接触所组成的平面运动副,称为副,它产生个约束,而保留个自由度。
3、机构中的运动副是指。
4、机构具有确定的相对运动条件是原动件数机构的自由度。
5、在平面机构中若引入一个高副将引入______个约束,而引入一个低副将引入_____个约束,构件数、约束数与·机构自由度的关系是。
6、在平面机构中,具有两个约束的运动副是副,具有一个约束的运动副是副。
7、计算平面机构自由度的公式为F=,应用此公式时应注意判断:((A))铰链,((B))自由度,((C))约束。
8、机构中的复合铰链是指;局部自由度是指;虚约束是指。
二、选择题1、有两个平面机构的自由度都等于1,现用一个带有两铰链的运动构件将它们串成一个平面机构,则其自由度等于。
(A) 0;(B) 1;(C) 22、原动件的自由度应为。
(A) 1;(B) +1;(C) 03、在机构中原动件数目机构自由度时,该机构具有确定的运动。
(A) 小于;(B) 等于;(C))大于。
4、计算机构自由度时,若计入虚约束,则机构自由度就会。
(A) 增多;(B) 减少;(C) 不变。
5、构件运动确定的条件是。
(A)自由度大于1;(B) 自由度大于零;(C) 自由度等于原动件数。
6、车轮在导轨上移动时,车轮与导轨间构成。
(A)转动副(B)移动副(C)高副7、平面机构中,如引入一个转动副,将带入个约束,保留个自由度。
(A)2,1 (B)1,2 (C)1,18、平面机构中,如引入一个高副,将带入个约束,保留个自由度。


机械设计基础复习题(二)第八章蜗杆传动复习题⒈判断题(1) 所有蜗杆传动都具有自锁性。
(×)(2) 蜗杆传动的接触应力计算,其目的是为防止齿面产生点蚀和胶合失效。
(√)(3) 蜗杆传动中,为了使蜗轮滚刀标准化、系列化,新标准中,将蜗杆的分度圆直径定为标准值。
(√)⒉选择题1. 两轴线 C 时,可采用蜗杆传动。
a.相交成某一角度 b.平行 c.交错 d.相交成直角2 计算蜗杆传动比时,公式 C 是错误的。
a.i=ω1/ ω2 b.i=z2/ z1 c.i=d2/ d13. 轴交角为90˚的阿基米德蜗杆传动,其蜗杆的导程角γ=8˚8΄30˝(右旋),蜗轮的螺旋角应为 B 。
a.81˚51΄30˝ b.8˚8΄30˝ c.20˚ d.15˚4. 对于重要的蜗杆传动,应采用 B 作蜗轮齿圈材料。
a.HT200 b.ZCuSn10Pb1 c.40Cr调质 d.18CrMnTi渗碳淬火5. 当蜗杆头数增加时,传动效率 B 。
a.减小 b.增加 c.不变⒊问答题(1) 蜗杆传动有哪些特点?适用于哪些场合?为什么?大功率传动为什么很少用蜗杆传动?(2) 何谓蜗杆传动的中间平面?何谓蜗杆分度圆直径?(3) 一对阿基米德圆柱蜗杆与蜗轮的正确啮合条件是什么?(4) 蜗杆传动的传动比等于什么?为什么蜗杆传动可得到大的传动比?为什么蜗杆传动的效率低?(5) 蜗杆传动中,为什么要规定d1与m 对应的标准值?第九章轮系复习题1 选择题(1) _C___轮系中的两个中心轮都是运动的。
a.行星 b.周转 c.差动(2) __A__轮系中必须有一个中心轮是固定不动的。
a.行星 b.周转 c.差动(3) 要在两轴之间实现多级变速传动,选用A轮系较合适。
a.定轴 b.行星 c.差动(4) 自由度为1的轮系是B。
a.周转 b.行星 c.差动(5) 差动轮系的自由度为 C 。
a.1 b.1或2 c.2(6) 在平面定轴轮系中,传动比的符号可由B决定。
第八章 蜗杆传动8-1 基础知识一、蜗杆传动的类型及特点根据蜗杆形状的不同,蜗杆传动可以分为圆柱蜗杆传动,环面蜗杆传动和锥面蜗杆传动等。
圆柱蜗杆传动包括普通圆柱蜗杆传动和圆弧圆柱蜗杆传动两类。
普通圆柱蜗杆又可分为(1)阿基米德蜗杆(ZA 蜗杆),在垂直于蜗杆轴线的平面上,齿廓为阿基米德螺旋线,在包含轴线的平面上的齿廓为直线;(2)渐开线蜗杆(ZI 蜗杆),这种蜗杆的端面齿廓为渐开线;(3)法向直廓蜗杆(ZN 蜗杆),其端面齿廓为延伸渐开线,法面齿廓为直线;(4)锥面包络蜗杆(ZK 蜗杆),一种非线性螺旋齿面蜗杆。
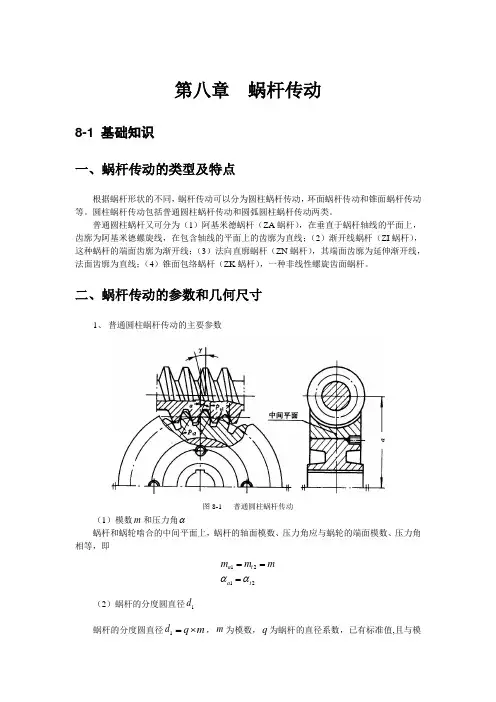
二、蜗杆传动的参数和几何尺寸1、 普通圆柱蜗杆传动的主要参数图8-1 普通圆柱蜗杆传动(1)模数m 和压力角α蜗杆和蜗轮啮合的中间平面上,蜗杆的轴面模数、压力角应与蜗轮的端面模数、压力角相等,即1212a t a t m m mαα===(2)蜗杆的分度圆直径1d 蜗杆的分度圆直径1d q m =⨯,m 为模数,q 为蜗杆的直径系数,已有标准值,且与模数相匹配。
1d q m = (8-1) (3)蜗杆头数1z蜗杆头数1z 通常取为1、2、4、6,也可根据要求的传动比和效率来选定。
(4)导程角γ 111111tan a z z P P z m z d d d q γππ==== (8-2)(5)传动比i 和齿数比u 传动比12n i n =,齿数比21z u z =,(1n 、2n 为蜗杆和蜗轮的转速,单位为r/min ,2z 为蜗轮的齿数)当蜗杆主动时,有 1221n z i u n z === (8-3)(6)蜗轮齿数2z 蜗轮齿数主要根据传动比来确定,通常规定2z 大于28,一般不大于80。
(7)蜗杆传动的标准中心距12211()()22a d d q z m =+=+ (8-4) 变位蜗杆的中心距为 1221(2)2a d d x m '=++ (8-5)2、 蜗杆传动的几何尺寸计算普通圆柱蜗杆传动主要参数的基本公式中心距 12211()()22a d d q z m =+=+ (标准传动中心距) 1221(2)2a d d x m '=++ (变位后实际中心距) 蜗杆轴向齿距a P m π=蜗杆导程1z P mz π=蜗杆分度圆直径1d mq =蜗杆导程角111tan //mz d z q γ==蜗轮变位系数2222z z x '-=(2z '为变位后齿轮的实际齿数) (8-6) 如图8-2 所示图8-2 普通圆柱蜗杆传动的基本几何尺寸三、普通圆柱蜗杆承载能力的计算1、 蜗杆传动的失效形式和设计准则蜗杆传动的失效形式有点蚀、齿根折断、齿面胶合及过度磨损等。
蜗杆传动蜗杆传动由蜗杆和蜗轮组成,一般蜗杆为主动件。
蜗杆和螺纹一样有右旋和左旋之分蜗杆传动,分别称为右旋蜗杆和左旋蜗杆。
蜗杆上只有一条螺旋线的称为单头蜗杆,即蜗杆转一周,蜗轮转过一齿,若蜗杆上有两条螺旋线,就称为双头蜗杆,即蜗杆转一周,蜗轮转过两个齿。
由蜗杆与蜗轮互相啮合组成的交错轴间的齿轮传动(图1)。
通常两轴的交错角为90°。
一般蜗杆为主动件,蜗轮为从动件。
蜗杆传动的传动比大,工作平稳,噪声小,结构紧凑,可以实现自锁。
但一般的蜗杆传动效率较低,蜗轮常须用较贵的有色金属(如青铜)制造。
蜗杆传动广泛用于分度机构和中小功率的传动系统。
单级蜗杆传动的传动比常用 8~80。
在分度机构或手动机构中蜗杆传动的传动比可达300,用于传递运动时可达到1500。
蜗杆传动-类型蜗杆传动有多种类型,如表所示。
蜗杆传动圆柱蜗杆传动是蜗杆分度曲面为圆柱面的蜗杆传动。
其中常用的有阿基米德圆柱蜗杆传动和圆弧齿圆柱蜗杆传动(图2)。
①阿基米德蜗杆的端面齿廓为阿基米德螺旋线,其轴面齿廓为直线。
阿基米德蜗杆可以在车床上用梯形车刀加工,所以制造简单,但难以磨削,故精度不高。
在阿基米德圆柱蜗杆传动中,蜗杆与蜗轮齿面的接触线与相对滑动速度之间的夹角很小,不易形成润滑油膜,故承载能力较低。
②弧齿圆柱蜗杆传动是一种蜗杆轴面(或法面)齿廓为凹圆弧和蜗轮齿廓为凸圆弧的蜗杆传动。
在这种传动中,接触线与相对滑动速度之间的夹角较大,故易于形成润滑油膜,而且凸凹齿廓相啮合,接触线上齿廓当量曲率半径较大,接触应力较低,因而其承载能力和效率均较其他圆柱蜗杆传动为高。
蜗杆传动-主要参数各类圆柱蜗杆传动的参数和几何尺寸基本相同。
图3为阿基米德圆柱蜗杆传动的主要参数。
通过蜗杆轴线并垂直于蜗轮轴线的平面,称为中间平面。
在中间平面上,蜗杆的齿廓为直线,蜗轮的齿廓为渐开线,蜗杆和蜗轮的啮合相当于齿条和渐开线齿轮的啮合。
因此,蜗杆传动的参数和几何尺寸计算大致与齿轮传动相同,并且在设计和制造中皆以中间平面上的参数和尺寸为基准。
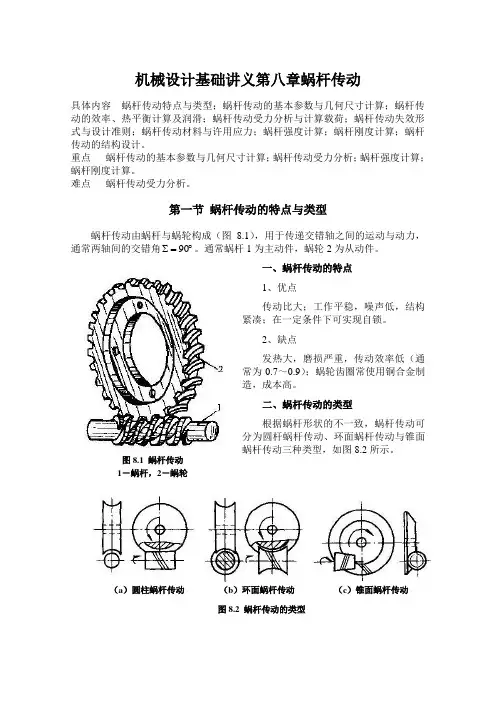
(a )圆柱蜗杆传动 (b )环面蜗杆传动 (c )锥面蜗杆传动图8.2 蜗杆传动的类型机械设计基础讲义第八章蜗杆传动具体内容 蜗杆传动特点与类型;蜗杆传动的基本参数与几何尺寸计算;蜗杆传动的效率、热平衡计算及润滑;蜗杆传动受力分析与计算载荷;蜗杆传动失效形式与设计准则;蜗杆传动材料与许用应力;蜗杆强度计算;蜗杆刚度计算;蜗杆传动的结构设计。
重点 蜗杆传动的基本参数与几何尺寸计算;蜗杆传动受力分析;蜗杆强度计算;蜗杆刚度计算。
难点 蜗杆传动受力分析。
第一节 蜗杆传动的特点与类型蜗杆传动由蜗杆与蜗轮构成(图8.1),用于传递交错轴之间的运动与动力,通常两轴间的交错角︒=∑90。
通常蜗杆1为主动件,蜗轮2为从动件。
一、蜗杆传动的特点1、优点传动比大;工作平稳,噪声低,结构紧凑;在一定条件下可实现自锁。
2、缺点发热大,磨损严重,传动效率低(通常为0.7~0.9);蜗轮齿圈常使用铜合金制造,成本高。
二、蜗杆传动的类型根据蜗杆形状的不一致,蜗杆传动可分为圆杆蜗杆传动、环面蜗杆传动与锥面蜗杆传动三种类型,如图8.2所示。
图8.1 蜗杆传动 1-蜗杆,2-蜗轮根据加工方法不一致,圆柱蜗杆传动又分为阿基米德蜗杆传动(ZA型)、法向直廓蜗杆传动(ZN型)、渐开线蜗杆传动(ZI型)与圆弧圆柱蜗杆传动(ZC型)等。
前三种称之普通圆柱蜗杆传动,见图8.3所示。
(a)阿基米德蜗杆(b)法向直廓蜗杆(c)渐开线蜗杆图8.3 普通蜗杆的类型第二节圆柱蜗杆传动的基本参数与几何尺寸计算在普通圆柱蜗杆传动中,阿基米德蜗杆传动制造简单,在机械传动中应用广泛,而且也是认识其他类型蜗杆传动的基础,故本节将以阿基米德蜗杆传动为例,介绍蜗杆传动的一些基本知识与设计计算问题。
一、蜗杆传动的基本参数通过蜗杆轴线并垂直于蜗杆轴线的平面称之中间平面,见图6.4。
在中间平面内,蜗杆与蜗轮的啮合相当于齿条与齿轮的啮合。
因此,设计圆柱蜗杆传动时,均取中间平面上的参数与几何尺寸作为基准。
第8讲蜗杆传动学习目标及考纲要求1.了解蜗杆传动的组成与应用特点。
2.掌握蜗杆传动的传动比与几何尺寸计算。
3.掌握蜗杆传动的旋转方向与受力方向的判定方法,熟悉其正确啮合条件。
知识梳理一、蜗杆传动的组成及类型1.蜗杆传动是由蜗杆、蜗轮、机架等构件组成,是利用蜗杆副传递运动和动力的一种机械传动装置.2.蜗杆与蜗轮的轴线在空间互相垂直交错成90°。
3.在蜗杆传动中,蜗杆通常为主动件。
4.蜗杆传动的类型蜗杆的类型很多,根据外形不同,有圆柱蜗杆、环面蜗杆、锥蜗杆等。
根据齿形不同,普通圆柱蜗杆有阿基米德蜗杆、渐开线蜗杆、法向直廓蜗杆等。
其中阿基米德蜗杆应有最广泛。
(见表1—8—1)主平面内,蜗杆传动相当于齿条传动。
主平面内,蜗杆齿形是直线,相当于齿条;蜗轮齿形是渐开线,相当于齿轮.二、蜗杆传动的特点(见表1-8—2)四、蜗杆传动的基本参数(见表1—8—4)表1-8—4五、蜗杆传动的几何尺寸计算(见表1-8-5)mq2mzh d 211+=(2*)a a d m q hh d 222+=2(2*)a d m z h h d 211-=(2*2*)a d m qh c f h d d 222-=2(2*2a dm z h c=2cos mzcosp m απcos cos p m απcos mf a h h +=(2**)a h m h cf a h h +=(2**)a h m h c*a mh *a mh (**)a m h c(**)a m h c*c m*c m2)2m z +齿顶高系数1,顶隙系数*0.2c六、蜗杆传动的正确啮合条件蜗杆传动在中间平面内的正确啮合条件如下:1。
蜗杆的轴向模数等于蜗轮的端面模数,即12x t m m m 。
2。
蜗杆的轴向齿形角等于蜗轮的端面齿形角,即1220x t 20°.3. 蜗杆的导程角等于蜗轮的螺旋角,且旋向相同,即。
γ1=β七、齿轮传动的受力分析(见表1—8—6)表1—8—6八、蜗杆传动的失效1. 蜗杆传动的失效总发生在蜗轮上。
第八章蜗杆传动主要内容1.蜗杆传动的类型、特点及应用场合;2.蜗杆传动的主要参数及其几何尺寸计算;3.蜗杆传动的常用材料、结构形式及润滑方式;4.蜗杆传动的受力分析、失效形式;5.蜗杆传动的设计准则及强度计算;6.蜗杆传动的效率及热平衡计算。
重点内容1.蜗杆传动的特点及应用蜗杆传动是传递空间两交错轴间运动和动力的一种传动机构,两轴的交错角通常为90°。
蜗杆传动是啮合传动,通过蜗杆轴线且垂直于蜗轮轴线的平面称为蜗杆传动的中间平面,在中间平面内蜗轮与蜗杆的啮合,相当于斜齿轮与直齿条相啮合。
因此,在受力分析、失效形式及强度计算等方面,它与齿轮传动有许多相似之处。
另一方面,蜗杆传动与螺旋传动有相似之处,具有传动平稳、传动比大,并可在一定条件下实现可靠的自锁等优点。
但由于在啮合处存在相当大的滑动,因而其主要失效形式是胶合、磨损与点蚀,且传动效率较低,所以在材料与参数选择、设计准则及热平衡计算等方面又独具特色。
由于传动效率较低,故不适合于大功率传动和长期连续工作的场合。
但是随着加工工艺技术的发展和新型蜗杆传动技术的不断出现,蜗杆传动的优点正在得到进一步的发扬,而其缺点正在得到很好的克服。
因此,蜗杆传动已普遍应用于各类传动系统中。
2.蜗杆传动的正确啮合条件在蜗杆传动的中间平面内,蜗杆与蜗轮的啮合相当于斜齿轮与直齿条相啮合,因此正确的啮合条件是:蜗杆轴向模数m a1与压力角αa2κ分别等于蜗轮端面模数m t2及压力角αt2,此外,由于蜗杆与蜗轮的轴线在空间交错成90°,所以蜗杆分度圆柱导程角γ1应等于蜗轮分度圆上螺旋角β2,且螺旋线方向相同(蜗杆和蜗轮同为右旋或同为左旋)。
即正确啮合条件为ma1=m t2=mακ1=αt2=αγ1=β23.蜗杆的分度圆直径d1由于蜗轮采用与蜗杆几何参数和尺寸相同的蜗杆滚刀加工,而经过分析推导蜗杆的分度圆直径d 1=z 1m/tg γ,所以在同一模数m 时,将有很多不同直径的蜗杆,这就需要配备很多蜗轮滚刀。
为了限制蜗轮滚刀的种类和数目及便于刀具的标准化,对应每一标准模数m 规定了一定数量的蜗杆的分度圆直径d 1,且把比值q=d 1/m 称为蜗杆的直径系数。
4.蜗杆传动的受力分析蜗杆传动的受力分析方法与斜齿圆柱齿轮相似,只是由于蜗杆和蜗轮轴线在空间垂直,属于空间机构,所以蜗杆与蜗轮各分力之间的关系不同。
要熟练掌握蜗轮传动中各分力的关系、大小和各分力方向的确定方法。
(1)各分力的关系及大小11212d T F F a t =-= 22212d T F F t a =-= αtan 221t r r F F F =-=(2)分力的方向蜗杆传动的各分力方向可以用轴测图表示,也可以用平面图表示。
各分力方向判定方法如下。
如图所示,已知蜗杆右旋且为主动件,蜗杆转动方向如图由下向上。
1) 主动件蜗杆轴向力F a1的方向在确定各分力的方向时,尤其需注意蜗杆所受轴向力F a1方向的确定。
因为轴向力F a1的方向是由蜗杆螺旋线的旋向和蜗杆的转向来决定的。
同斜齿轮一样,用左右手定则判定主动蜗杆轴向力F a1的方向。
即左旋蜗杆用左手,右旋蜗杆用右手,手握蜗杆使四指与蜗杆转向相同,拇指平伸,拇指指向即为蜗杆轴向力F a1的方向,如图所示,F a1方向指向左端,且与蜗杆的轴线平行。
2)蜗轮的圆周力F由于F t2和F a1是作用力与反作用力关系,所以F t2只要在F a1反方向标注即可。
然后根据从动蜗轮在啮合节点处圆周速度方向与所受的圆周力F t2方向相同,来判定蜗轮的转动方向。
如图所示,F t2指向右端,则蜗轮逆时针方向转动。
3)蜗杆的圆周力F t1的方向根据主动蜗杆在啮合节点处圆周速度方向与所受的圆周力F t1方向相反,来判定蜗杆的圆周力方向。
如图所示,F t1的方向由纸里向外。
4)蜗轮轴向力F a2的方向由于F a2和F t1是作用力与反作用力关系,所以F a2只要在F t1反方向标注即可。
如图所示,F a2的方向由外向纸里。
5)蜗轮和蜗杆的径向力F r1和F r2方向同齿轮传动受力分析一样方向,主动蜗杆和从动蜗轮所受的径向力分别指向各自圆心。
方向如图所示。
在蜗杆传动受力分析时,要注意以下两点:一是在使用左右手定则时,在主动蜗杆的转动方向、螺旋线旋向和轴向力的方向中,只要已知其中的两个条件,就可求出另一未知项;二是各分力一定要画在啮合节点处。
5.蜗杆传动的失效形式由于采用材料和蜗杆、蜗轮结构上的原因,蜗杆螺旋部分的强度总是高于蜗轮轮齿的强度,所以失效常发生在蜗轮轮齿上。
又因啮合处的相对滑动速度大,所以其主要失效形式为在蜗轮齿面产生点蚀、胶合与磨损。
同时因摩擦发热,使润滑油的温度上升,粘度下降,润滑状态变坏,增加了失效的可能性。
6.蜗轮蜗杆材料的选用对于蜗杆传动中材料的组合,首先要求具有良好的减摩性、耐磨性和抗胶合能力,同时应具有一定的强度。
通常蜗杆采用碳钢或合金钢,而蜗轮材料则视其传动中齿面相对滑动速度u,的高低而定。
u较高时,选用抗胶合能力强的锡青铜,但这种材料的强度低,主要失效为点蚀,其承载能力取决于蜗轮的接触疲劳强度;u较低时,可选用价格较低的无锡青铜或铸铁,这两类材料的强度较前者高,但抗胶合能力差,故主要失效为胶合,其承载能力取决于抗胶合能力。
蜗轮与蜗杆选用不同材料及蜗杆渗碳淬火和表面淬火有利于提高蜗杆传动抗失效的能力。
7.蜗杆传动的强度计算由于蜗杆传动的失效形式与齿轮传动的失效形式相似,目前尚缺乏对胶合和磨损的工程实用计算方法,通常仿效齿轮传动的方法进行条件性计算。
又由于蜗杆传动的失效多发生在蜗轮上,所以只需进行蜗轮轮齿的强度计算,而对蜗杆必要时应进行刚度校核。
实践证明:一般情况下,蜗轮齿很少发生弯曲疲劳折断,只有当z2较大或开式传动时,才对蜗轮进行弯曲疲劳强度计算。
因此,对于闭式蜗杆传动,仅按蜗轮齿面接触疲劳强度进行设计,而无需校核蜗轮轮齿的弯曲疲劳强度。
8.蜗杆传动效率闭式蜗杆传动的功率损耗一般包括三方面,即啮合摩擦损耗、轴承摩擦损耗及侵入油池中的零件搅油时的溅油损耗。
因此总效率为η=η1η2η3其中η1、、η2、η3分别为啮合摩擦损耗效率、轴承摩擦损耗效率及侵入油池中的零件搅油时的溅油损耗效率。
一般取η2η3=0.95—0.96,所以蜗杆传动的总效率η,主要取决于蜗杆啮合效率η1。
当蜗杆为主动时η1=tgγ/tg(γ+ρv)故蜗杆传动的总效率为η=η1η2η3=(0.95—0.96)tgγ/tg(γ+ρv)由上式可知,为提高蜗杆传动的总效率,应提高蜗杆导程角γ或采用多头蜗杆。
9.蜗杆传动的热平衡计算热平衡计算的主要目的是防止油温过高而使润滑失败,造成传动失效。
热平衡计算通常针对的是连续工作的闭式蜗杆传动。
在蜗杆传动中,因为齿面间有很大的相对滑动速度,摩擦损耗大(特别是轮齿的啮合摩擦损耗),所以传动效率低,工作时发热量大。
由于蜗杆传动结构紧凑,箱体的散热面积小,散热能力差,所以在闭式传动中,所产生的热量不能及时散去,油温会急剧升高,这样就容易使齿面产生胶合。
因此要进行热平衡计算。
热平衡计算的基本原理是单位时间内产生的热量等于或小于同时间内散发出去的热量。
在实际工作中,主要是利用热平衡条件,求出工作条件下应该控制的油温或箱体表面所需的散热面积。
如果在结构设计时满足不了所需的散热面积或油温,应采取一些辅助散热措施。
9.要重视各种类型蜗杆传动的比较与选用。
由于阿基米德蜗杆具有加工简便等优点,故在机械中应用最广。
重要概念1.蜗杆传动的类型、特点根据蜗杆形状的不同,蜗杆传动可分为圆柱蜗杆形状、环面蜗杆形状和锥蜗杆形状。
圆柱蜗杆形状又分为阿基米德蜗杆、延伸渐开线蜗杆、渐开线蜗杆、锥面包络圆柱蜗杆和圆弧圆柱蜗杆传动。
其中阿基米德蜗杆由于其具有加工简便等优点,目前在机械中应用最为广泛。
2.阿基米德蜗杆传动的中间平面通过蜗杆轴线且垂直于蜗轮轴线的平面称为阿基米德蜗杆传动的中间平面,在中间平面内蜗轮与蜗杆的啮合,相当于斜齿轮与直齿条相啮合。
3.蜗杆传动的精度等级圆柱蜗杆传动规定了12个精度等级,其中1级精度最高,12级精度最低。
圆柱蜗杆传动采用的精度等级,主要取决于传动功率、蜗轮圆周速度和使用条件等。
4.蜗杆传动中蜗杆头数和蜗轮齿数的确定蜗杆头数z1主要根据传动比和传动效率来确定,蜗杆头数z1常取为1、2、4、6。
蜗轮齿数z2要综合考虑传动比大小、避免蜗轮产生根切及蜗杆的弯曲刚度等因素综合确定,蜗轮齿数z2一般在17和80之间选取。
5.蜗杆传动的中心距蜗杆传动的标准中心距为a=(d1+d2)/2=(q+z2)m/2无特殊情况时,蜗杆传动的中心距应选择标准系列值。
例题与解析例8 -1 如图所示,电动机驱动的普通圆柱蜗杆传动,已知主动蜗杆模数m=6.3mm,蜗杆直径d1=63mm,蜗杆头数z1=2,蜗轮齿数z2=60,蜗轮为右旋,蜗杆轴输入功率p1=5.5KW,n1=2920r/min,蜗轮蜗杆的当量摩擦系数f v=0.016,蜗杆传动的轴承摩擦效率和零件搅油效率为η2η3=0.95,载荷平稳。
试求:(1)蜗杆的旋向和蜗轮的转向;(2)传动的啮合效率和总效率;(3)作用在蜗杆和蜗轮上的各分力的大小和方向。
例8-1图解题注意要点:蜗杆传动旋向、转向和各分力大小和方向的分析方法。
解:1、蜗杆的旋向和蜗轮的转向由蜗杆传动的正确啮合条件知,蜗杆的旋向应与蜗轮相同,故蜗杆为右旋;根据蜗杆左右手定则,可确定Fa1的方向,由Ft2=-Fa1,由Ft2的方向即可确定蜗轮的转向n2,如图所示。
2、传动的啮合效率η1和总效率η蜗杆圆周速度v1=πd1n1/60×1000=9.63m/s分度圆导程角tgγ=z1m/d1=2×6.3/63=0.2γ=11.3099°=11°18′36″ρv=tg-1f v=0.92°=55′12″啮合效率η1=tgγ/tg(γ+ρv)=0.923传动总效率ηη=η1η2η3=0.95η1=0.95×0.923=0.8773、受力分析蜗杆和蜗轮所受各分力的方向如图所示。
蜗杆转矩T1=9.55×106P/n1=1.8×104Nmm蜗轮转矩T2=T1η1i=1.8×104×0.923×60/2Nmm各分力的大小为F t1=F a2=2T1/d1=2×1.8×104/63=571.4NF t2=F a1=2T2/d2=2T2/mz2=2×4.98×105/6.3×60=2635NF r2=F r1=F t2×tgα=2635×tg20°=959N例8-2 手动起重装置如图。