PLC控制步进电机的实例(图与程序)
- 格式:pdf
- 大小:148.05 KB
- 文档页数:2
PLC控制步进电机的实例(图与程序)
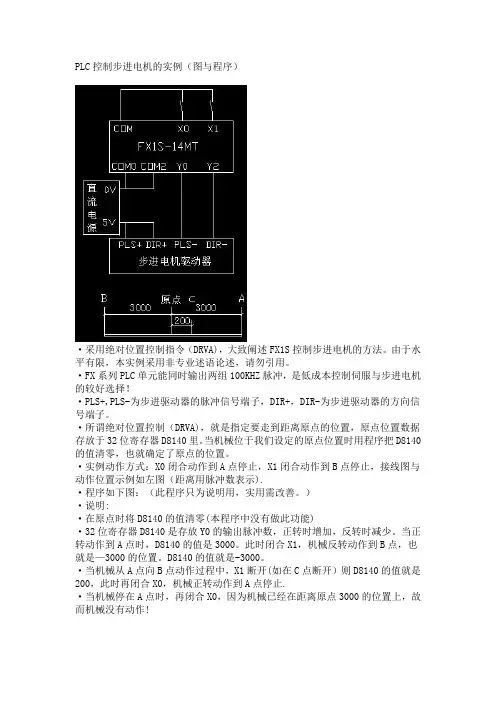
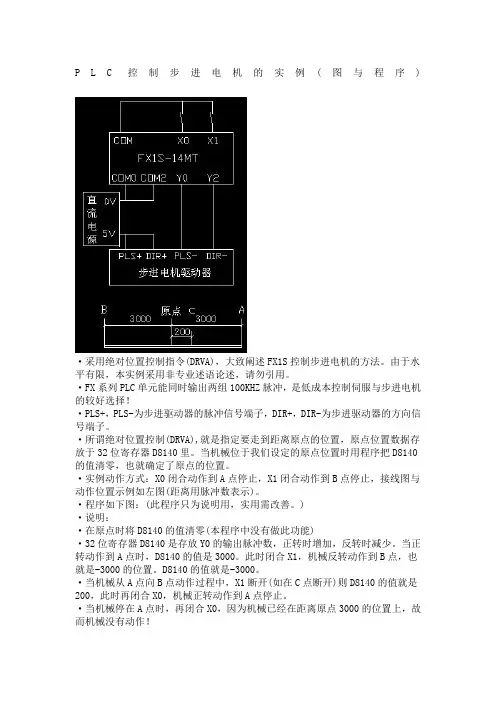
·采用绝对位置控制指令(DRVA),大致阐述FX1S控制步进电机的方法。由于水平有限,本实例采用非专业述语论述,请勿引用。
·FX系列PLC单元能同时输出两组100KHZ脉冲,是低成本控制伺服与步进电机的较好选择!
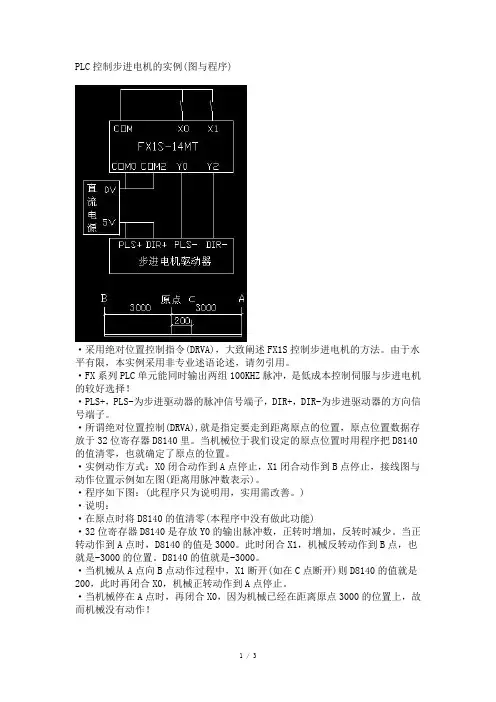
·PLS+,PLS-为步进驱动器的脉冲信号端子,DIR+,DIR-为步进驱动器的方向信号端子。
·所谓绝对位置控制(DRVA),就是指定要走到距离原点的位置,原点位置数据存放于32位寄存器D8140里。当机械位于我们设定的原点位置时用程序把D8140的值清零,也就确定了原点的位置。
·实例动作方式:X0闭合动作到A点停止,X1闭合动作到B点停止,接线图与动作位置示例如左图(距离用脉冲数表示).
·程序如下图:(此程序只为说明用,实用需改善。)
·说明:
·在原点时将D8140的值清零(本程序中没有做此功能)
·32位寄存器D8140是存放Y0的输出脉冲数,正转时增加,反转时减少。当正转动作到A点时,D8140的值是3000。此时闭合X1,机械反转动作到B点,也就是—3000的位置。D8140的值就是-3000。
·当机械从A点向B点动作过程中,X1断开(如在C点断开)则D8140的值就是200,此时再闭合X0,机械正转动作到A点停止.
·当机械停在A点时,再闭合X0,因为机械已经在距离原点3000的位置上,故而机械没有动作!
·把程序中的绝对位置指令(DRVA)换成相对位置指令(DRVI):
·当机械在B点时(假设此时D8140的值是-3000)闭合X0,则机械正转3000个脉冲停止,也就是停在了原点。D8140的值为0
·当机械在B点时(假设此时D8140的值是—3000)闭合X1,则机械反转3000个脉冲停止,也就是停在了左边距离B点3000的位置(图中未画出),D8140的值为-6000。
·一般两相步进电机驱动器端子示意图:
·FREE+,FREE-:脱机信号,步进电机的没有脉冲信号输入时具有自锁功能,也就是锁住转子不动.而当有脱机信号时解除自锁功能,转子处于自由状态并且不响应步进脉冲。
FX1S控制步进电机的实例(图与程序)
FX1S控制步进电机的实例(图与程序) :
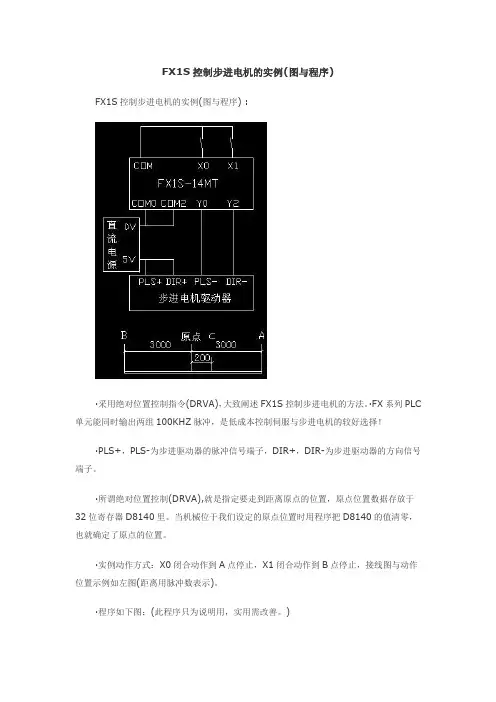
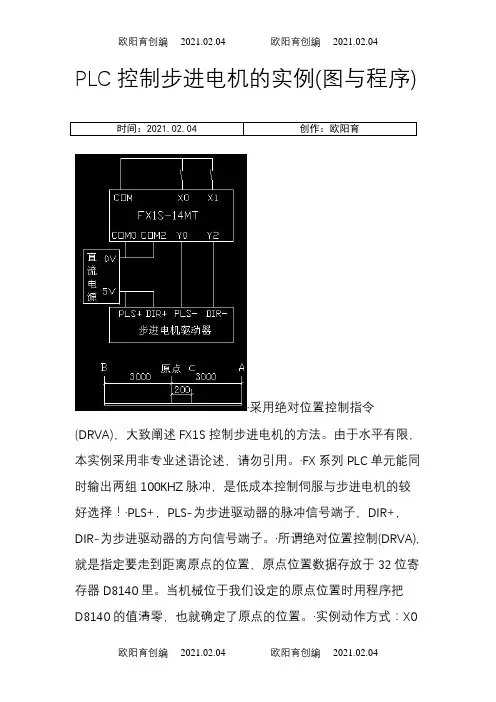
·采用绝对位置控制指令(DRVA),大致阐述FX1S控制步进电机的方法。·FX系列PLC单元能同时输出两组100KHZ脉冲,是低成本控制伺服与步进电机的较好选择!
·PLS+,PLS-为步进驱动器的脉冲信号端子,DIR+,DIR-为步进驱动器的方向信号端子。
·所谓绝对位置控制(DRVA),就是指定要走到距离原点的位置,原点位置数据存放于32位寄存器D8140里。当机械位于我们设定的原点位置时用程序把D8140的值清零,也就确定了原点的位置。
·实例动作方式:X0闭合动作到A点停止,X1闭合动作到B点停止,接线图与动作位置示例如左图(距离用脉冲数表示)。
·程序如下图:(此程序只为说明用,实用需改善。)
说明:
·在原点时将D8140的值清零(本程序中没有做此功能)
·32位寄存器D8140是存放Y0的输出脉冲数,正转时增加,反转时减少。当正转动作到A点时,D8140的值是3000。此时闭合X1,机械反转动作到B点,也就是-3000的位置。D8140的值就是-3000。
·当机械从A点向B点动作过程中,X1断开(如在C点断开)则D8140的值就是200,此时再闭合X0,机械正转动作到A点停止。
·当机械停在A点时,再闭合X0,因为机械已经在距离原点3000的位置上,故而机械没有动作!
·把程序中的绝对位置指令(DRVA)换成相对位置指令(DRVI):
·当机械在B点时(假设此时D8140的值是-3000)闭合X0,则机械正转3000个脉冲停止,也就是停在了原点。D8140的值为0
·当机械在B点时(假设此时D8140的值是-3000)闭合X1,则机械反转3000个脉冲停止,也就是停在了左边距离B点3000的位置(图中未画出),D8140的值为-6000。
·一般两相步进电机驱动器端子示意图:
·FREE+,FREE-:脱机信号,步进电机的没有脉冲信号输入时具有自锁功能,也就是锁住转子不动。而当有脱机信号时解除自锁功能,转子处于自由状态并且不响应步进脉冲。
此主题相关图片如下,点击图片看大图:
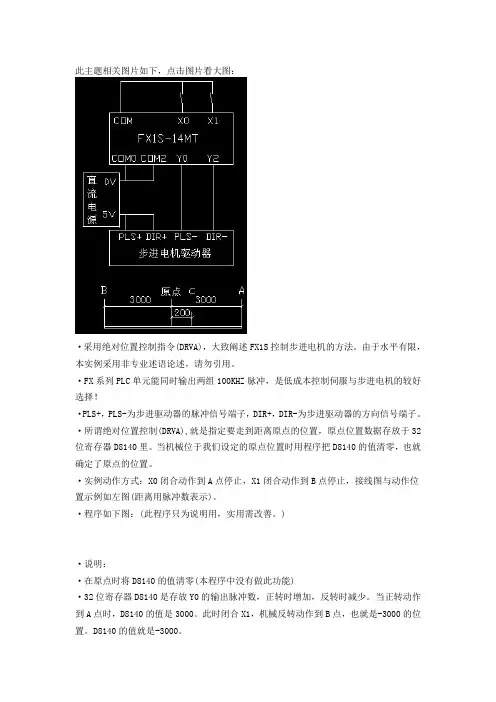
·采用绝对位置控制指令(DRVA),大致阐述FX1S控制步进电机的方法。由于水平有限,本实例采用非专业述语论述,请勿引用。
·FX系列PLC单元能同时输出两组100KHZ脉冲,是低成本控制伺服与步进电机的较好选择!
·PLS+,PLS-为步进驱动器的脉冲信号端子,DIR+,DIR-为步进驱动器的方向信号端子。
·所谓绝对位置控制(DRVA),就是指定要走到距离原点的位置,原点位置数据存放于32位寄存器D8140里。当机械位于我们设定的原点位置时用程序把D8140的值清零,也就确定了原点的位置。
·实例动作方式:X0闭合动作到A点停止,X1闭合动作到B点停止,接线图与动作位置示例如左图(距离用脉冲数表示)。
·程序如下图:(此程序只为说明用,实用需改善。)
·说明:
·在原点时将D8140的值清零(本程序中没有做此功能)
·32位寄存器D8140是存放Y0的输出脉冲数,正转时增加,反转时减少。当正转动作到A点时,D8140的值是3000。此时闭合X1,机械反转动作到B点,也就是-3000的位置。D8140的值就是-3000。 ·当机械从A点向B点动作过程中,X1断开(如在C点断开)则D8140的值就是200,此时再闭合X0,机械正转动作到A点停止。
·当机械停在A点时,再闭合X0,因为机械已经在距离原点3000的位置上,故而机械没有动作!
·把程序中的绝对位置指令(DRVA)换成相对位置指令(DRVI):
·当机械在B点时(假设此时D8140的值是-3000)闭合X0,则机械正转3000个脉冲停止,也就是停在了原点。D8140的值为0
·当机械在B点时(假设此时D8140的值是-3000)闭合X1,则机械反转3000个脉冲停止,也就是停在了左边距离B点3000的位置(图中未画出),D8140的值为-6000。
·一般两相步进电机驱动器端子示意图:
·FREE+,FREE-:脱机信号,步进电机的没有脉冲信号输入时具有自锁功能,也就是锁住转子不动。而当有脱机信号时解除自锁功能,转子处于自由状态并且不响应步进脉冲。
PLC控制步进电机的实例(图与程序)
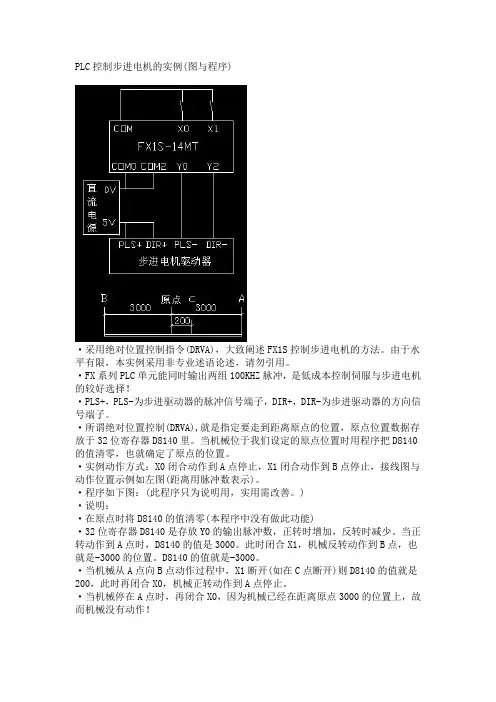
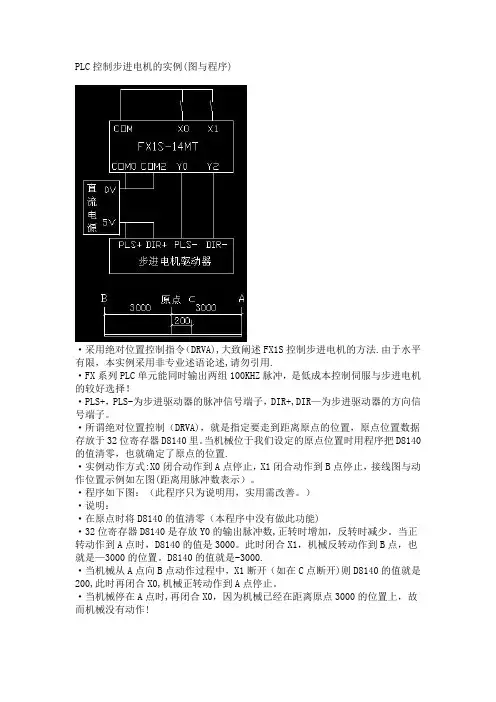
·采用绝对位置控制指令(DRVA),大致阐述FX1S控制步进电机的方法。由于水平有限,本实例采用非专业述语论述,请勿引用。
·FX系列PLC单元能同时输出两组100KHZ脉冲,是低成本控制伺服与步进电机的较好选择!
·PLS+,PLS-为步进驱动器的脉冲信号端子,DIR+,DIR-为步进驱动器的方向信号端子。
·所谓绝对位置控制(DRVA),就是指定要走到距离原点的位置,原点位置数据存放于32位寄存器D8140里。当机械位于我们设定的原点位置时用程序把D8140的值清零,也就确定了原点的位置。
·实例动作方式:X0闭合动作到A点停止,X1闭合动作到B点停止,接线图与动作位置示例如左图(距离用脉冲数表示)。
·程序如下图:(此程序只为说明用,实用需改善。)
·说明:
·在原点时将D8140的值清零(本程序中没有做此功能)
·32位寄存器D8140是存放Y0的输出脉冲数,正转时增加,反转时减少。当正转动作到A点时,D8140的值是3000。此时闭合X1,机械反转动作到B点,也就是-3000的位置。D8140的值就是-3000。
·当机械从A点向B点动作过程中,X1断开(如在C点断开)则D8140的值就是200,此时再闭合X0,机械正转动作到A点停止。
·当机械停在A点时,再闭合X0,因为机械已经在距离原点3000的位置上,故而机械没有动作!
·把程序中的绝对位置指令(DRVA)换成相对位置指令(DRVI):
·当机械在B点时(假设此时D8140的值是-3000)闭合X0,则机械正转3000个脉冲停止,也就是停在了原点。D8140的值为0
·当机械在B点时(假设此时D8140的值是-3000)闭合X1,则机械反转3000个脉冲停止,也就是停在了左边距离B点3000的位置(图中未画出),D8140的值为-6000。
·一般两相步进电机驱动器端子示意图:
·FREE+,FREE-:脱机信号,步进电机的没有脉冲信号输入时具有自锁功能,也就是锁住转子不动。而当有脱机信号时解除自锁功能,转子处于自由状态并且不响应步进脉冲。
PLC控制步进电机的实例(图与程序)
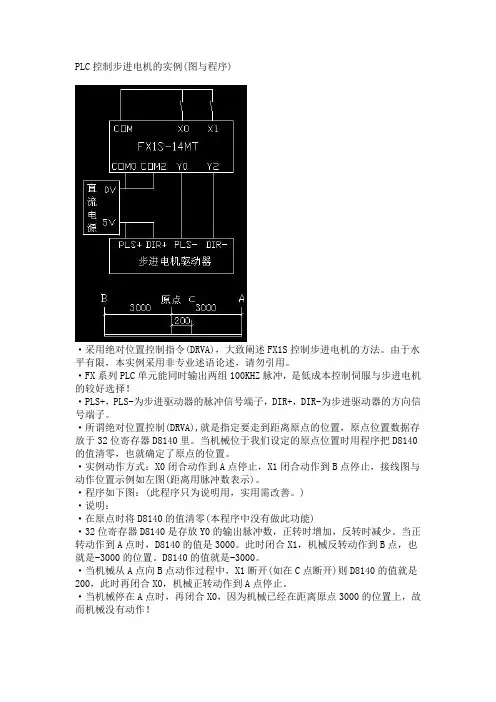
·采用绝对位置控制指令(DRVA),大致阐述FX1S控制步进电机的方法。由于水平有限,本实例采用非专业述语论述,请勿引用。
·FX系列PLC单元能同时输出两组100KHZ脉冲,是低成本控制伺服与步进电机的较好选择!
·PLS+,PLS-为步进驱动器的脉冲信号端子,DIR+,DIR-为步进驱动器的方向信号端子。
·所谓绝对位置控制(DRVA),就是指定要走到距离原点的位置,原点位置数据存放于32位寄存器D8140里。当机械位于我们设定的原点位置时用程序把D8140的值清零,也就确定了原点的位置。
·实例动作方式:X0闭合动作到A点停止,X1闭合动作到B点停止,接线图与动作位置示例如左图(距离用脉冲数表示)。
·程序如下图:(此程序只为说明用,实用需改善。)
·说明:
·在原点时将D8140的值清零(本程序中没有做此功能)
·32位寄存器D8140是存放Y0的输出脉冲数,正转时增加,反转时减少。当正转动作到A点时,D8140的值是3000。此时闭合X1,机械反转动作到B点,也就是-3000的位置。D8140的值就是-3000。
·当机械从A点向B点动作过程中,X1断开(如在C点断开)则D8140的值就是200,此时再闭合X0,机械正转动作到A点停止。
·当机械停在A点时,再闭合X0,因为机械已经在距离原点3000的位置上,故而机械没有动作!
·把程序中的绝对位置指令(DRVA)换成相对位置指令(DRVI):
·当机械在B点时(假设此时D8140的值是-3000)闭合X0,则机械正转3000个脉冲停止,也就是停在了原点。D8140的值为0
·当机械在B点时(假设此时D8140的值是-3000)闭合X1,则机械反转3000个脉冲停止,也就是停在了左边距离B点3000的位置(图中未画出),D8140的值为-6000。
·一般两相步进电机驱动器端子示意图:
·FREE+,FREE-:脱机信号,步进电机的没有脉冲信号输入时具有自锁功能,也就是锁住转子不动。而当有脱机信号时解除自锁功能,转子处于自由状态并且不响应步进脉冲。
用FX1S 实现PLC控制步进电机的实例(图与程序)
原创 2018-01-26 工控教练 工控教练
FX1s是晶体管型PLC,有两个脉冲输出端子,分别是Y0 和Y1,能同时输出两组100KHZ的脉冲。PLS+,PLS-是步进驱动器的脉冲信号端子,DIR+,DIR-是步进驱动器的方向信号端子。本次实例的动作方式:当正转开关X0 闭合时,电机动作到 A 点停止;当反转开关X1 闭合时,电机动作到 B
点停止。1·绝对位置控制(DRVA),是指定要走到距离原点的位置,原点位置数据存放于 32 位寄存器 D8140 里。当机械位于我们设定的原点位置时用程序把 D8140 的值清零,也就确定了原点的位置。·实例动作方式:正转开关X0 闭合时,电机动作到 A 点停止;反转开关X1 闭合时,电机动作到 B 点停止。2 三菱FX系列PLC绝对位置控制指令DRVA应用:绝对位置控制指令DRVA的 格式: DRVA D0
D2 Y0 Y2 *D0:目标位置,可以是数值或是寄存器,也就是PLC要输出的脉冲个数。 *D2:输出脉冲频率,可以是数值或是寄存器。也就是PLC输出的脉冲频率,也就是速度 *Y0:脉冲输出地址,只能是Y0或Y1。 *Y2:方向控制输出,正向是ON或是OFF,反向是OFF或是ON(根据所控制执行元件设置来确定)3下面是PLC程序的梯形图:(此程序只为说明用,实用需改善。)·在原点时将 D8140 的值清零(本程序中没有做此功能)·32 位寄存器 D8140 是存放 Y0 的输出脉冲数,正转时增加,反转时减少。当正转动作到 A 点时,D8140 的值是 3000。此时闭合 X1,机械反转动作到 B 点,也就是-3000 的位置。D8140 的值就是-3000。·当机械从 A 点向 B 点动作过程中,X1 断开(如在 C 点断开)则 D8140 的值就是 200,此时再闭合 X0,机械正转动作到 A 点停止。·当机械停在 A 点时,再闭合
PLC控制步进电机的实例(图与程序)
·采用绝对位置控制指令(DRVA),大致阐述FX1S控制步进电机的方法.由于水平有限,本实例采用非专业述语论述,请勿引用.
·FX系列PLC单元能同时输出两组100KHZ脉冲,是低成本控制伺服与步进电机的较好选择!
·PLS+,PLS-为步进驱动器的脉冲信号端子,DIR+,DIR—为步进驱动器的方向信号端子。
·所谓绝对位置控制(DRVA),就是指定要走到距离原点的位置,原点位置数据存放于32位寄存器D8140里。当机械位于我们设定的原点位置时用程序把D8140的值清零,也就确定了原点的位置.
·实例动作方式:X0闭合动作到A点停止,X1闭合动作到B点停止,接线图与动作位置示例如左图(距离用脉冲数表示)。
·程序如下图:(此程序只为说明用,实用需改善。)
·说明:
·在原点时将D8140的值清零(本程序中没有做此功能)
·32位寄存器D8140是存放Y0的输出脉冲数,正转时增加,反转时减少。当正转动作到A点时,D8140的值是3000。此时闭合X1,机械反转动作到B点,也就是—3000的位置。D8140的值就是-3000.
·当机械从A点向B点动作过程中,X1断开(如在C点断开)则D8140的值就是200,此时再闭合X0,机械正转动作到A点停止。
·当机械停在A点时,再闭合X0,因为机械已经在距离原点3000的位置上,故而机械没有动作!
·把程序中的绝对位置指令(DRVA)换成相对位置指令(DRVI):
·当机械在B点时(假设此时D8140的值是—3000)闭合X0,则机械正转3000个脉冲停止,也就是停在了原点.D8140的值为0
·当机械在B点时(假设此时D8140的值是—3000)闭合X1,则机械反转3000个脉冲停止,也就是停在了左边距离B点3000的位置(图中未画出),D8140的值为—6000。
·一般两相步进电机驱动器端子示意图:
·FREE+,FREE—:脱机信号,步进电机的没有脉冲信号输入时具有自锁功能,也就是锁住转子不动.而当有脱机信号时解除自锁功能,转子处于自由状态并且不响应步进脉冲.
PLC控制步进电机的实例(图与程序)
·采用绝对位置控制指令(DRVA),大致阐述FX1S控制步进电机的方法。由于水平有限,本实例采用非专业述语论述,请勿引用。
·FX系列PLC单元能同时输出两组100KHZ脉冲,是低成本控制伺服与步进电机的较好选择!
·PLS+,PLS-为步进驱动器的脉冲信号端子,DIR+,DIR-为步进驱动器的方向信号端子。
·所谓绝对位置控制(DRVA),就是指定要走到距离原点的位置,原点位置数据存放于32位寄存器D8140里。当机械位于我们设定的原点位置时用程序把D8140的值清零,也就确定了原点的位置。
·实例动作方式:X0闭合动作到A点停止,X1闭合动作到B点停止,接线图与动作位置示例如左图(距离用脉冲数表示)。
·程序如下图:(此程序只为说明用,实用需改善。)
·说明:
·在原点时将D8140的值清零(本程序中没有做此功能)
·32位寄存器D8140是存放Y0的输出脉冲数,正转时增加,反转时减少。当正转动作到A点时,D8140的值是3000。此时闭合X1,机械反转动作到B点,也就是-3000的位置。D8140的值就是-3000。
·当机械从A点向B点动作过程中,X1断开(如在C点断开)则D8140的值就是200,此时再闭合X0,机械正转动作到A点停止。
·当机械停在A点时,再闭合X0,因为机械已经在距离原点3000的位置上,故而机械没有动作!
·把程序中的绝对位置指令(DRVA)换成相对位置指令(DRVI):
·当机械在B点时(假设此时D8140的值是-3000)闭合X0,则机械正转3000个脉冲停止,也就是停在了原点。D8140的值为0
·当机械在B点时(假设此时D8140的值是-3000)闭合X1,则机械反转3000个脉冲停止,也就是停在了左边距离B点3000的位置(图中未画出),D8140的值为-6000。
·一般两相步进电机驱动器端子示意图:
·FREE+,FREE-:脱机信号,步进电机的没有脉冲信号输入时具有自锁功能,也就是锁住转子不动。而当有脱机信号时解除自锁功能,转子处于自由状态并且不响应步进脉冲。
1 / 3 PLC控制步进电机的实例(图与程序)
·采用绝对位置控制指令(DRVA),大致阐述FX1S控制步进电机的方法。由于水平有限,本实例采用非专业述语论述,请勿引用。
·FX系列PLC单元能同时输出两组100KHZ脉冲,是低成本控制伺服与步进电机的较好选择!
·PLS+,PLS-为步进驱动器的脉冲信号端子,DIR+,DIR-为步进驱动器的方向信号端子。
·所谓绝对位置控制(DRVA),就是指定要走到距离原点的位置,原点位置数据存放于32位寄存器D8140里。当机械位于我们设定的原点位置时用程序把D8140的值清零,也就确定了原点的位置。
·实例动作方式:X0闭合动作到A点停止,X1闭合动作到B点停止,接线图与动作位置示例如左图(距离用脉冲数表示)。
·程序如下图:(此程序只为说明用,实用需改善。)
·说明:
·在原点时将D8140的值清零(本程序中没有做此功能)
·32位寄存器D8140是存放Y0的输出脉冲数,正转时增加,反转时减少。当正转动作到A点时,D8140的值是3000。此时闭合X1,机械反转动作到B点,也就是-3000的位置。D8140的值就是-3000。
·当机械从A点向B点动作过程中,X1断开(如在C点断开)则D8140的值就是200,此时再闭合X0,机械正转动作到A点停止。
·当机械停在A点时,再闭合X0,因为机械已经在距离原点3000的位置上,故而机械没有动作!
2 / 3
·把程序中的绝对位置指令(DRVA)换成相对位置指令(DRVI):
·当机械在B点时(假设此时D8140的值是-3000)闭合X0,则机械正转3000个脉冲停止,也就是停在了原点。D8140的值为0
·当机械在B点时(假设此时D8140的值是-3000)闭合X1,则机械反转3000个脉冲停止,也就是停在了左边距离B点3000的位置(图中未画出),D8140的值为-6000。
·一般两相步进电机驱动器端子示意图:
欧阳育创编 2021.02.04 欧阳育创编 2021.02.04
欧阳育创编 2021.02.04 欧阳育创编 2021.02.04 PLC控制步进电机的实例(图与程序)
时间:2021.02.04 创作:欧阳育
·采用绝对位置控制指令(DRVA),大致阐述FX1S控制步进电机的方法。由于水平有限,本实例采用非专业述语论述,请勿引用。·FX系列PLC单元能同时输出两组100KHZ脉冲,是低成本控制伺服与步进电机的较好选择!·PLS+,PLS-为步进驱动器的脉冲信号端子,DIR+,DIR-为步进驱动器的方向信号端子。·所谓绝对位置控制(DRVA),就是指定要走到距离原点的位置,原点位置数据存放于32位寄存器D8140里。当机械位于我们设定的原点位置时用程序把D8140的值清零,也就确定了原点的位置。·实例动作方式:X0欧阳育创编 2021.02.04 欧阳育创编 2021.02.04
欧阳育创编 2021.02.04 欧阳育创编 2021.02.04 闭合动作到A点停止,X1闭合动作到B点停止,接线图与动作位置示例如左图(距离用脉冲数表示)。·程序如下图:(此程序只为说明用,实用需改善。)·说明:·在原点时将D8140的值清零(本程序中没有做此功能)·32位寄存器D8140是存放Y0的输出脉冲数,正转时增加,反转时减少。当正转动作到A点时,D8140的值是3000。此时闭合X1,机械反转动作到B点,也就是-3000的位置。D8140的值就是-3000。·当机械从A点向B点动作过程中,X1断开(如在C点断开)则D8140的值就是200,此时再闭合X0,机械正转动作到A点停止。·当机械停在A点时,再闭合X0,因为机械已经在距离原点3000的位置上,故而机械没有动作! ·把程序中的绝对位置指令(DRVA)换成相对位置指令(DRVI):·当机械在B点时(假设此时D8140的值是-3000)闭合X0,则机械正转3000个脉冲停止,也就是停在了原点。D8140的值为0·当机械在B点时(假设此时D8140的值是-3000)闭合X1,则机械反转3000个脉冲停止,也就是停在了左边距离B点3000的位置(图中未画出),D8140的值为-6000。 ·一般两相步进电机驱动器端子示意图:·FREE+,FREE-:脱机信号,步进电机的没有脉冲信号输入时具有自锁功能,也就是锁住转子不动。而当有脱机信号时解除自锁功能,转子处于自由状态并且不响应步进脉冲。·V+,GND:为驱动器直流电源端子,也有交流供电类型。·A+,A-,B+,B-分别接步进电机的两相线欧阳育创编 2021.02.04 欧阳育创编 2021.02.04
垫!! :垫 Science and Technology Innovation Herald P L C在步进电机控制中的应用 刘琛森 (广西贺州市技工学校 广西贺州 542800) 工程技术
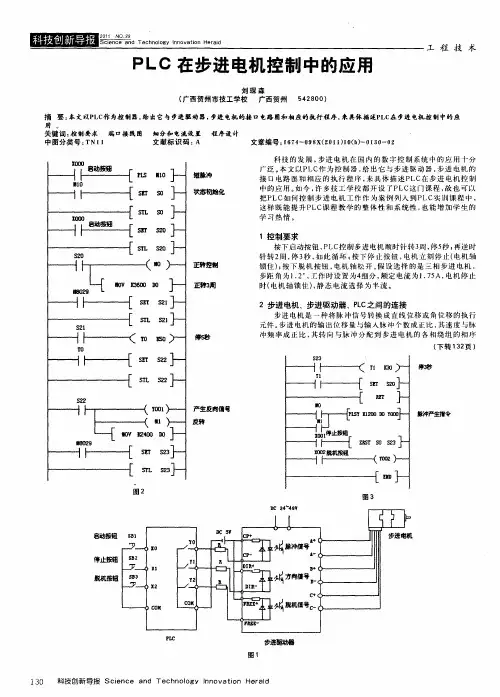
摘要:本文v ̄PLC作为控制器,给出它与步进驱动器,步进电机的接13,电路图和相应的执行程序,来具体描述PLc在步进电机控制中的应 用。 关键词:控制要求 端口接线图 细分和电流设置 程序设计 中图分类号:TN1 1 文献标识码:A 文章编号:1674--09 8X(2011)lO(b)-01 30-02 启.动摄锄 r , ?I,?I Lr二 I I L 广一 IO00 L I I自珈嘲 r . I I L r— s20 L“ l l 麒啦9删L- 1 1 L 广 一 szl L l I / l I \T T0 I I r.. i i L r L — S22 I I l I 辩BcI29 删砭一 I I 广 I I L r . L 启动按钮 停止按钮 脱机按钮 短脉冲 状态韧宴{i化
芷转控制 芷转3周
产生反向信号 反转 科技的发展,步进电机在国内的数字控制系统中的应用十分 广泛。本文以PLC作为控制器,给出它与步进驱动器,步进电机的 接口电路图和相应的执行程序,来具体描述PLC在步进电机控制 中的应用。如今,许多技工学校都开设了PLC这门课程,故也可以 把PLc如何控制步进电机工作作为案例列入到PLC实训课程中, 这样既能提升PLC课程教学的整体性和系统性,也能增加学生的 学习热情。 1控制要求 按下启动按钮,PLC控制步进电机顺时针转3周,停5秒;再逆时 针转2周,停3秒,如此循环;按下停止按钮,电机立刻停止(电机轴 锁住);按下脱机按钮,电机轴松开。假设选择的是三相步进电机, 步距角为1.2。,工作时设置为4细分,额定电流为1.75A,电机停止 时(电机轴锁住),静态电流选择为半流。 2步进电机、步进驱动器、PLC之间的连接 步进电机是一种将脉冲信号转换成直线位移或角位移的执行 元件。步进电机的输出位移量与输入脉冲个数成正比,其速度与脉 冲频率成正比,其转向与脉冲分配到步进电机的各相绕组的相序 (下转1 32页) ——— 卜——1:rI l∞ — SEt szo— r— szo卜 r … 1 ——— r— z OO03 ----SO¥23 j- I I \…厂一 广一1 L .r 图3
湖南电气职业技术学院毕业设计(论文)
1 摘要
本文主要阐述了三相三拍步进电动机结构和步进电机原理,以及对步进电机的调速和正反转的研究。采用PLC基本逻辑指令和常用指令的方法对步进电机调速很正反转控制。步进电机是一种将脉冲信号转换成直线位移或角位移的执行元件。步进电机的输出位移量与输入脉冲个数成正比,其速度与单位时间内输入的脉冲数(即脉冲频率)成正比,其转向与脉冲分配到步进电机的各相绕组的相序有关。所以只要控制指令脉冲的数量、频率及电机绕组通电的相序,便可控制步进电机的输出位移量、速度和方向。步进电机具有较好的控制性能,其启动、停车、反转及其它任何运行方式的改变都可在少数脉冲内完成,且可获得较高的控制精度,因而得到了广泛的应用。
湖南电气职业技术学院毕业设计(论文)
2 Summary
This paper describes the structure of three-phase three-beat stepper motors
and
stepper motor principle, and the stepper motor speed control and reversing research.
Using PLC basic logic instructions and common method of instruction is reversing
the
stepper motor speed control. Stepper motor is a pulse signal into a
linear
displacement or angular displacement of the actuator. The output of the stepper motor
displacement is proportional to the number of input pulses, the speed and unit time
第 1 章 PLC控制步进电机正反转实验
1.1 实验目的
1、 了解PLC的理论与原理; 2、 掌握PLC编程与操作方法。 3、 了解接近传感器的使用方法 1.2 实验设备
1、 三菱PLC编程电缆及安装好三菱编程软件的计算机一台; 2、 模块化柔性制造系统一套。 1.3 实验原理
料库旋转台是依靠步进电机控制的,高精度旋转模块。依靠PLC 自身含有的脉冲单元,发出驱动脉冲给步进电机驱动器。驱动器接收到该脉冲以后,根据所发脉冲的频率和数量驱动步进电机向相应的方向旋转。 1、 步进电机 步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器 虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。 步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。 现在比较常用的步进电机包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)和单相式步进电机等。 永磁式步进电机 永磁式步进电机一般为两相,转矩和体积较小,步进角一般为7.5度 或15度; 反应式步进电机 反应式步进电机一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。反应式步进电机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩。 混合式步进电机
S7—200PLC的PTO在步进电机位置控制中的应用
研究了高速脉冲串输出在步进电机位置控制中的应用,包括应用PLS指令、MAP指令库及位置控制指令向导等方法。给出了系统构成,说明了各种方法的应用。对步进电机的位置控制有实际意义。
标签:S7-200;步进电机;位置控制;PTO;MAP;PLS
引言
作为自动控制系统中的执行元件,步进电机的应用十分广泛,主要原因是步进电机有很多优点,其中它的控制方法比较简单。步进电机的转速、停止的位置只取决于脉冲信号的频率和脉冲个数。可以通过控制脉冲频率来控制电机转动的速度和加速度,进行调速;可以通过控制脉冲个数来控制角位移量,进行准确定位。
控制步进电机的方法较多,目前流行的是采用PLC通过步进电机驱动器来控制步进电机。为了配合步进电机的控制,许多PLC都内置脉冲输出功能,并设置了相应的控制指令,可以很好地对步进电机进行控制。
为了实现对步进电机的开环定位控制,可以通过PLC控制输出脉冲来实现。本文应用SIEMENS公司S7-200PLC来控制步进电机。SIEMENS公司S7-200PLC主要提供了以下几种方式的开环定位控制:脉冲串输出(PTO)、EM253位控模块、自由口通信等。文章主要探讨PTO这种方式。
1 步进电机位置控制系统
1.1 硬件系统
步进电机位置控制系统由PLC、步进电机驱动器、步进电机和丝杠组成。
系统选择的PLC为SIEMENS公司CPU226DC/DC/DC型。
選用的步进电机是42H2P4812A4的两相混合式步进电机,该型号的步进电机步矩角为1.8°,相电流1.2A,静转矩4.5kg·cm,额定转速400rmp。
选用的驱动器型号为2MA320,该驱动器的供电电压DC12-36V ,驱动电流0.3-2.0A,细分精度1-128细分,可驱动任何2.0A相电流以下两相、四相混合式步进电机。
由于上述步进电机的相电流为1.2A,驱动器的SW1-SW3分别设置为:ON、OFF、OFF,即输出峰值电流为1.5A,SW5-SW7分别设置为ON、ON、ON,即细分设定为200步/圈。
1、主程序先正转,等到正转完了就中断,中断中接通个辅助触点(M0.X),当M.0X闭合,住程序中的反转开始运做。这样子就OK了。
2、用PTO指令让Q0.0 OR Q0.1高速脉冲,另一个点如Q0.2做方向信号,就可以控制正反转了,速度快慢就要控制输出脉冲周期了,周期越短速度越快,如果你速度很快的话请考虑缓慢加速,不然它是启动不了的,如果方向也变的快的话就要还做一个缓慢减速,不然它振动会蛮厉害,而且也会失步。
3、程NETWORK 1 // 用于单段脉冲串操作的主程序(PTO)
// 首次扫描时,将映像寄存器位设为低
// 并调用子程序0
LD SM0.1
R Q0.0 1
CALL SBR_0
NETWORK 1 // 子程序0开始
LD SM0.0
MOVB 16#8D SMB67 // 设置控制字节:
// - 选择PTO操作
// - 选择单段操作
// - 选择毫秒增加
// - 设置脉冲计数和周期数值
// - 启用PTO功能
MOVW +500 SMW68 // 将周期设为500毫秒。
MOVD +4 SMD72 // 将脉冲计数设为4次脉冲。
ATCH INT_0 19 // 将中断例行程序0定义为
// 处理PTO完成中断的中断。
ENI // 全局中断启用 PLS 0 // 激活PTO操作,PLS0 =》 Q0.0
MOVB 16#89 SMB67 // 预载控制字节,用于随后的
// 周期改动。
NETWORK 1 // 中断0开始
// 如果当前周期为500毫秒:
// 将周期设为1000毫秒,并生成4次脉冲
LDW= SMW68 +500
MOVW +1000 SMW68
PLS 0
CRETI
NETWORK 2
// 如果当前周期为1000毫秒:
维普资讯 工业自 T1他原始 看料定位启动
图2 自动供料控制系统组成原理图 (3)程序设计 ①控制参数 DMD402驱动器细分数选为8,即每转160o个脉冲 ; 脉冲周期设置为SM68=500( s);步进电动机转一周需 1600x5001 ̄s=0.9s,即转速为1.1 lr/s。 高速脉冲输出采用Pr0单段流水工作方式,控制字 SM67=85H。 料盘与传动轮的传动比k=6.4,料盘转一步45。。需要 的脉冲数n计算公式为:击= 得:n=1280 Pr0脉冲计数值SMD72=1280。 ②控制流程图 程序控制流程图如图3所示。在用PLC进行编程时, 分别编写Pr0初始化子程序INIT、初始料盘驱动子程序 STEPPING、再转45。子程序S rEP01,通过子程序调用功 能指令实现步进控制的初始化和驱动,子程序梯形图如图 4所示。其余各步可以用顺序功能图来编写。 步进电机驱动控制的顺序功能图(SFC)如图5所示。 广0一.[MOV_B I ̄! (a)子程序INIT 控制过程共分成六步,即初始料盘定位步M0.0、初转到位 步M0.2、初转到位无料判断步M0.3、再转45。步M0.4、 再转结束步M0.5、再转到位无料判断步M0.6。初始转盘
图3 自动供料程序流程图 定位步M0.0用启动信号10.2激活,以后的步变为活动步 的条件是它的前级步为活动步,且二者之间的转换条件满 足。活动步变为不活动步的条件是用后续步的常闭触点断 开它的线圈电路。为了能够在断开启动开关10.2后,所有 的步都变为OFF,需要将10.2常开触点串联到各步的线圈 电路中。
(b)子程序STEPPING (c)子程序SrEPO1 图4 步进控制初始化、初始料盘驱动、再转45。驱动三个子程序 (下转第84页)
维普资讯 性对继电保护装置的影响提供科学依据,为牵引供电系统 继电保护装置的设计、选型、运行提供试验条件。 参考文献: [1]刘长胜,陈礼义,郑玉森,等.电力系统数模混合试验系统 [J].天津大学学报,2004,37(1):80-83. [2]汤涌.电力系统数字仿真技术的现状与发展[J].电力系统 自动化,2oo2,26(17):66—70. [3]叶林.杨仁刚,等.电力系统实时数字仿真器RTDS[J]. 2004,7:49—52. [4]E.Pilo,L.Rouco.A reduced representation of 2x25kV elec. trical systems for hish-speed railways[A].Proceedings of the 2003 IEEEIASME Joint Rail Conference[C],April 22— 24,2003 Chicago,Illinois,2003. [5]P.Ferrari,P.Pozzobon,Member IEEE.Railway lines models for impedance evaluation『C].the 8”Intemational Confer. enee on Harmonies and Qualily of Power ICHQP 98,jointly organized by IEEEIPES and NTUA,Athens,Greece,Octo- ber 14—1 6。1998. 第一作者简介:石耀勇,男,1981年生,四川南充人,大学本 科。助理工程师。研究领域:铁道电气化专业的新技术及新工艺。 已发表论文3篇。 (编辑:向 飞) (上接第67页)