基于西门子S7_300PLC对三相步进电机的控制
- 格式:pdf
- 大小:195.95 KB
- 文档页数:2
目录1 概述 (1)1.1 PLC控制步进电机研究的意义 (1)2 基于PLC的步进电机控制系统设计 (9)2.1 系统的组成及功能 (9)2.2 步进电机特性 (9)2.3 PLC介绍 (12)2.4 步进电机控制系统程序设计 (13)3 磁头定位 (20)3.1 硬盘工作原理 (20)3.2 磁头及定位系统 (23)4 难题及解决过程 (24)5 结论 (25)结束语 (28)致谢 (29)参考文献 (30)附录A (31)1 概述1.1 PLC控制步进电机研究的意义基于步进电动机良好的控制和准确定位特性,被广泛应用在精确定位方面,诸如数控机床、绘图机、扎钢机、自动控制计算装置、自动记录仪表等自动控制领域。
PLC作为简单化了的计算机,功能完备、灵活、通用、控制系统简单易懂,价格便宜,可现场修改程序,体积小、硬件维护方便,价格便宜等优点,在全世界广泛应用,为生产生活带来巨大效益方便。
因此,通过研究用PLC来控制步进电动机的,既可实现精确定位控制,又能降低控制成本,还有利于维护。
以往的步进电动机需要靠驱动器来控制,随着技术的不断发展完善,PLC具有了通过自身输出脉冲直接步进电动机的功能,这样就有利于步进电动机的精确控制。
本课题《基于PLC的步进电机磁头定位系统设计》就是利用PLC控制步进电机在硬盘工作时磁头定位的研究。
1.2 国内外关于步进电机和PLC的应用状况1.2.1 步进电机方面步进电机是一种将电脉冲转化为角位移的执行元件。
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
虽然步进电机已被广泛地应用,但步进电机并不能像普通的直流电机、交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
题目基于西门子S7-300PLC的三轴联动机器人编程设计_自动化学院_院(系)自动化_专业学号*****###姓名学生姓名指导教师第一指导教师顾问教师第二指导教师(可不填写)起止日期2013.12.20 – 2014.06.10设计地点PLC控制的三轴联动系统设计摘要在工业自动化的发展过程中,多轴立式系统越来越多地应用到工业生产中。
由于PLC的稳定性和伺服电机的高精度特性,PLC控制的多轴伺服系统已经成为满足高度自动化高精度需求的一大趋势。
PLC控制的三轴联动设计时稳定的多轴系统的基础。
该系统以PLC为核心控制器,提供高稳定性和高度抗干扰能力的控制器。
三轴上的伺服电机以其高精度和适合频繁通断的特性为系统保证了高精度位置需求和频繁启停的需求。
本文介绍了基于三个伺服电机的和一个三相异步电机组成的移物系统,在PLC中通过对开关信号、各轴上的传感器输入信号和内部计时器定时器信号进行综合处理,并通过一定的时序让系统有机运行,系统的各个部分各个轴按时序逻辑运行。
最终实现系统的移物功能,并能抵抗掉电等意外干扰因素,使系统能够稳定、安全地运行。
本模板的快捷键说明,请仔细阅读:关键词:西门子、PLC、伺服电机、三轴联动、精确定位THREE-AXIS CONTROL SYSTEM DESIGN OF PLCAbstractIn the process of development of industrial automation, multi-axis vertical systems are increasingly applied to industrial production. Due to the stability and precision characteristics PLC servo motor, PLC controlled multi-axis servo system has become highly automated precision to meet the demands of a major trend.PLC-based control of three-axis stabilized design of multi-axis systems. The system PLC as the core controller, providing high stability and high anti-jamming capability of the controller. On-axis servo motor with high precision and suitable for frequent on-off characteristics of the system to ensure the accuracy position needs and the needs of the frequent start-stop.This article describes the physical system is based on three-shift servo motor and a three-phase asynchronous motors composed in the PLC through the switching signal, sensor input signal and the internal timer timer signal processing integrated along each axis, and through a certain the timing of the various parts of the system so that the organic operation, the system's various axes run by temporal logic. Ultimately the system move things function, and can resist accidental power-down and other confounding factors, enabling the system to a stable and safe operation.KEYWORDS: Siemens, PLC, Servo motor, Three-axis, Precise positioning目录摘要 (I)ABSTRACT (II)第1章绪论 (1)1.1项目背景 (1)1.2项目设计任务 (2)1.3项目设计思想 (2)1.4运行设备与环境 (2)1.5本文研究内容及各章安排 (2)1.5.1各章安排 (3)1.5.2课题关键问题和难点 (3)第2章总体设计 (4)2.1系统硬件的总体设计 (4)2.1.1硬件总体框架 (4)2.1.2PLC控制三轴电机 (4)2.2系统软件的总体设计 (5)2.2.1数据存储与查询 (5)第3章系统硬件设计 (8)3.1PLC简介 (8)3.1.1PLC的定义 (8)3.1.2PLC的发展和未来 (8)3.1.3PLC的工作原理 (8)3.1.4PLC的优点 (9)3.2系统PLC配置 (10)3.2.1S7-300CPU的基本结构 (10)3.2.2S7-300CPU的基本结构 (12)3.2.3S7-300CPU的输入输出模式 (12)3.3伺服电机简介 (14)3.3.1伺服电机的基本常识 (14)3.3.2伺服电机的工作原理 (14)3.3.3伺服电机的优点 (15)3.3.4交流伺服系统的基本结构 (15)3.3.5伺服电机与步进电机相比的优点 (15)3.4伺服电机驱动器 (16)3.4.1伺服电机驱动器的结构 (16)3.4.2伺服电机驱动器内部结构及接线 (18)3.4.3伺服电机驱动器的参数设置 (19)3.4.4传送带机械结构 (25)3.4.5系统引脚分配 (26)第4章系统软件设计 (30)4.1软件设计概略 (30)4.2各个动能块软件设计 (31)4.2.1系统的硬件配置 (31)4.2.2脉冲输出设计 (32)4.2.3电机定位设计 (35)4.2.4数据观测 (37)4.2.5掉电保护 (38)4.2.6不同形状摆放 (39)第5章系统调试 (41)5.1硬件部分的调试 (41)5.2软件部分的调试 (42)5.2.1脉冲输出的调试 (42)5.2.2程序编辑的调试 (43)第6章总结与展望 (44)参考文献 (45)致谢 (46)第1章绪论1.1 项目背景随着工业自动化的发展,现实生产中对自动化程度和生产工艺的要求越来越高,简单的一台电机已经不能满足要求。
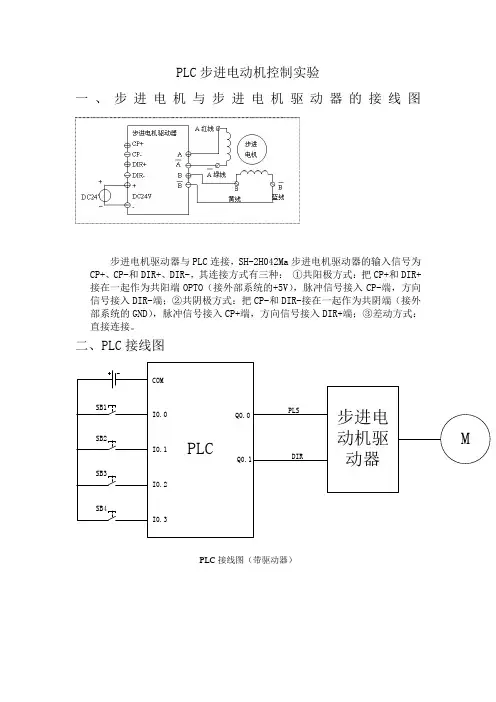
PLC步进电动机控制实验一、步进电机与步进电机驱动器的接线图步进电机驱动器与PLC连接,SH-2H042Ma步进电机驱动器的输入信号为CP+、CP-和DIR+、DIR-,其连接方式有三种:①共阳极方式:把CP+和DIR+接在一起作为共阳端OPTO(接外部系统的+5V),脉冲信号接入CP-端,方向信号接入DIR-端;②共阴极方式:把CP-和DIR-接在一起作为共阴端(接外部系统的GND),脉冲信号接入CP+端,方向信号接入DIR+端;③差动方式:直接连接。
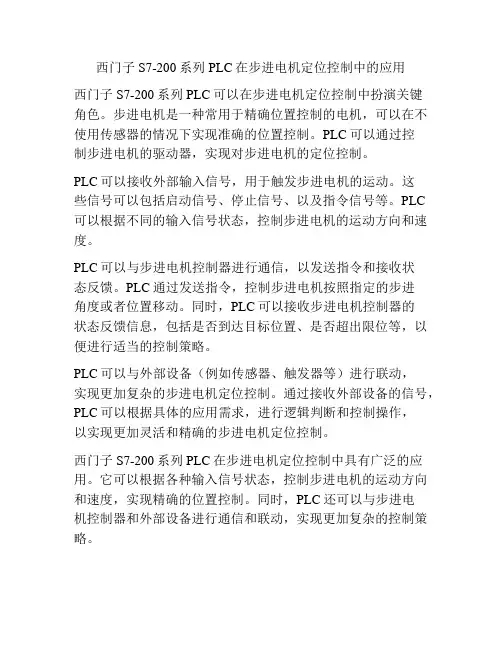
二、PLC接线图PLC接线图(带驱动器)PLC 接线图(不带驱动器,输出电源电压应与步进电动机额定电压匹配) SB1为启动按钮,SB2为停止按钮,SB3为加速按钮,SB4为减速按钮。
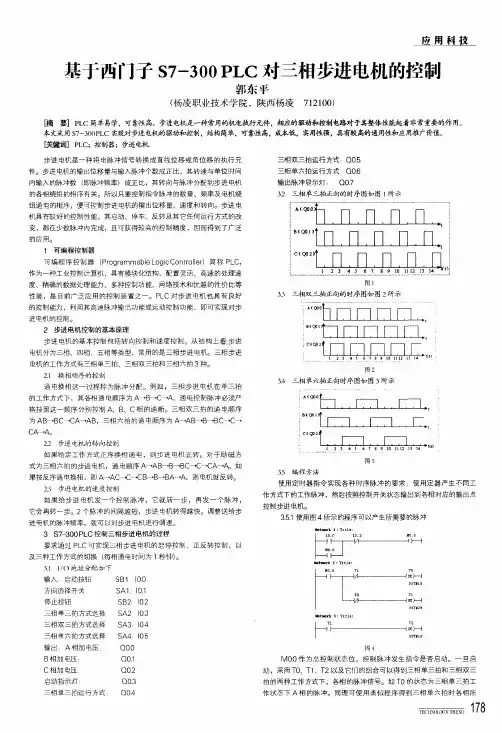
三、按带驱动器的PLC 接线图的方式编写PLC 程序四、附录:采用西门子S7-300PLC 控制三相步进电机的过程例子电路说明:输出: A 相加电压:Q0.0B 相加电压:Q0.1C 相加电压:Q0.2 启动指示灯:Q0.3三相单三拍运行方式:Q0.4三相双三拍运行方式:Q0.5 三相单六拍运行方式:Q0.6 输出脉冲显示灯: Q0.7三相单三拍运行方式三相双三拍运行方式三相单六拍运行方式编程方法:1.使用定时器指令实现各种时序脉冲的要求:使用定器产生不同工作方式下的工作脉冲,然后按照控制开关状态输出到各相对应的输出点控制步进电机。
M0.0作为总控制状态位,控制脉冲发生指令是否启动。
一旦启动,采用T0、T1、T2以及它们的组合可以得到三相单三拍和三相双三拍的两种工作方式下,各相的脉冲信号。
如T0的状态为三相单三拍工作状态下A相的脉冲。
同理可使用类似程序得到三相单六拍时各相所需的脉冲信号。
2.使用移位指令实现各相所需的脉冲信号。
例如在MW10中进行移位,每次移位的时间为1秒钟。
如图为三相单六拍正向时序流程图,三相单三拍可利用相同的流程图,从M11.1开始移位,每次移两位,而三相双三拍从M11.2开始,每次移两位。
西门子S7-200系列PLC在步进电机定位控制中的应用
西门子S7-200系列PLC可以在步进电机定位控制中扮演关键
角色。
步进电机是一种常用于精确位置控制的电机,可以在不使用传感器的情况下实现准确的位置控制。
PLC可以通过控
制步进电机的驱动器,实现对步进电机的定位控制。
PLC可以接收外部输入信号,用于触发步进电机的运动。
这
些信号可以包括启动信号、停止信号、以及指令信号等。
PLC
可以根据不同的输入信号状态,控制步进电机的运动方向和速度。
PLC可以与步进电机控制器进行通信,以发送指令和接收状
态反馈。
PLC通过发送指令,控制步进电机按照指定的步进
角度或者位置移动。
同时,PLC可以接收步进电机控制器的
状态反馈信息,包括是否到达目标位置、是否超出限位等,以便进行适当的控制策略。
PLC可以与外部设备(例如传感器、触发器等)进行联动,
实现更加复杂的步进电机定位控制。
通过接收外部设备的信号,PLC可以根据具体的应用需求,进行逻辑判断和控制操作,
以实现更加灵活和精确的步进电机定位控制。
西门子S7-200系列PLC在步进电机定位控制中具有广泛的应用。
它可以根据各种输入信号状态,控制步进电机的运动方向和速度,实现精确的位置控制。
同时,PLC还可以与步进电
机控制器和外部设备进行通信和联动,实现更加复杂的控制策略。
1任务分析1.1分析控制对象三相步进电动机是一种将电脉冲信号转换成直线位移或角位移的执行元件。
步进电机的输出位移量与输入脉冲个数成正比,其转速与单位时间内输入的脉冲数(脉冲频率)成正比,其转向与脉冲分配到步进电机的各相绕组的相序有关。
所以只要控制指令脉冲的数量、频率及电机绕组通电相序,便可控制步进电机的输出位移量、速度和转向。
步进电机具有较好的控制性能,其启动、停车、反转及其它任何运行方式改变,都在少数脉冲内完成,且可获得较高的控制精度,因而得到了广泛的应用。
1.2三相步进电机的控制要求三相的控制要求如下:○1能对三相步进电动机的转速进行控制;○2可实现对三相步进电动机的正反转控制;○3能对三相步进电动机的步数进行控制;2方案设计在步进电动机控制系统中,步进电动机作为一种控制用的特种电机,利用其没有积累误差的特点,广泛应用于各种控制中,其控制主要有开环、半闭环、闭环控制。
方案一:开环控制系统图2.1 开环步进电动机控制系统框图开环控制系统没有使用位置、速度检测装置及反馈装置,因此具有结构简单、使用方便、可靠性高、制造成本低等优点。
另外,步进电动机受控于脉冲量,它比直流电机或交流电机组成的开环精度高,适用于精度要求不太高的机电一体化伺服传动系统。
方案二:半闭环控制系统图2.2 半闭环步进电动机控制系统框图半闭环控制系统调试比较方便,并且具有很好的稳定性,不过精度不太高,较少使用。
方案三:闭环控制系统图2.3 闭环步进电动机控制系统框图闭环控制系统定位精度高,但调试和维修都较困难,系统复杂,成本高。
综合三种方案,根据步进电动机的特点,从制造成本与系统结构复杂程度考虑,本设计采用方案一,在开环控制系统中,用PLC控制三相步进电动机。
3 步进电动机的选择现在比较常用的步进电机包括反应式步进电动机,永磁性步进电动机,混合式步进电动机和单相式步进电动机。
永磁式步进电动机一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进电动机一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。
基于PLC的步进电机的控制摘要:小型PLC在编程,I/O扩展,通讯接口,开关量和模拟量的调节以及一些特殊功能模块如高速计数输入和脉冲输出的应用上已经基本满足用户的需求了。
但随着应用需求及关联产品技术性能的提升,PLC将继续得已完善和发展。
本文主要论述了步进电机的原理及驱动方法,并在S7-200 PLC的基础上,对步进电机进行控制。
本设计选用PLC控制两相混合式步进电机,在PLC编程的基础上用按钮开关控制步进电机的启动、正转、反转等基本功能。
关键词:S7-200 PLC 两相混合式步进电机PLC编程Control of stepping motor based on PLCAbstract: In the field of programming, I/O expansion, Communication interface, adjustments of switches and simulation and some special function modules such as the application of high speed pulse input and output, the PLC has already met demands of users. But the PLC will continue to improve and develop, as the development of application requirements and related technical performance.This article chiefly discusses the principle and driven approach of the stepping motor, and how to control it based on the S7-200 PLC. The article is about how the PLC controlling the two-phase hybrid stepping motor. With the switch button, it can function as: start,positive rotation,inversion.Key words: S7-200 PLC two-phase hybrid stepping motor PLC programming目录第一章绪论 (1)1.1 概述 (1)1.2 S7-200PLC国内外现状和发展趋势 (2)1.3 论文的主要研究工作 (3)第二章西门子 S7-200 PLC (4)2.1 PLC的产生 (4)2.2 PLC的特点 (4)2.2.1 编程方法简单易学 (4)2.2.2 硬件配套齐全,用户使用方便 (5)2.2.3 通用性强,适应性强 (5)2.2.4 可靠性高,抗干扰能力强 (5)2.2.5 系统的设计、安装、调试工作量少 (5)2.2.6 维修工作量小,维修方便 (5)2.2.7 体积小,能耗低 (5)2.3 PLC的系统构成 (6)2.3.1 主机 (6)2.3.2 I/O扩展机 (6)2.3.3 外部设备 (7)2.4高速脉冲输出功能 (7)2.4.1用于脉冲输出(Q0.0或Q0.1)的特殊存储器 (7)2.4.2 PTO的使用 (9)2.5 PLC的选择 (10)2.5.1 CPU224 (10)2.5.2 工作方式 (10)2.5.3 扫描周期 (11)2.5.4 性能简介及特点 (11)2.6 PLC技术在步进电机控制中的应用 (12)第三章步进电机 (14)3.1 步进电机的特点 (14)3.2 步进电机的基本参数 (15)3.3 步进电机的工作原理及分类 (15)3.3.1 步进电机的工作原理 (16)3.3.2 步进电机的分类 (16)3.3.3 步进电机在工业中的应用 (17)第四章S7-200 PLC控制步进电机设计 (18)4.1 步进电机的选择 (18)4.2 步进电机驱动电路设计 (19)4.2.1 驱动器的选择 (19)4.2.2 步进电机驱动技术 (19)4.2.3 驱动器参数设置 (22)4.3 PLC控制步进电机 (22)4.3.1接线实物图 (23)4.3.2 控制电机方向转动 (24)4.4 程序调试 (25)第五章论文总结 (28)参考文献 (29)致谢 (30)附录 (31)第一章绪论1.1 概述可编程控制器(简称PLC) 是一种数字运算操作的电子系统,是在20 世纪60 年代末面向工业环境由美国科学家首先研制成功的。
应用科技基于西门子s7—300PL C对三相步进电机的控制郭东平(杨凌职业技术学院,陕西杨凌712100)脯要]PL C简单易学,可靠性高。
步进电机是一种常用的机电执行元件,相应的驱动和控制电路对于其整银洼能起着非常重要的作用。
本文采用s7—300PL C实现对步进电机的驱动和控制,结构简单,可靠性高,成本低,实用性强,具有较高的通用性和应用推广价值。
[关镑司]PLC;控制器;步进电机步进电机是一种将电脉冲信号转换成直线位移或角位移的执行元件。
步进电机的输出位移量与输入脉冲个数成正比,其转速与单位时间内输入的脉冲数(即脉冲频率)成正比,其转向与脉冲分配到步进电机的各相绕组的相序有关。
所以只要控制指令脉冲的数量、频率及电机绕组通电的相序,便可控制步进电机的输出位移量、速度和转向。
步进电机具有较好的控制性能,其启动、停车、反转及其它任何运行方式的改变,都在少数脉冲内完成,且可获得较高的控制精度,因而得到了广泛的应用。
1可编程控制器可编程序控制器(Pr ogr am m abl e L o gi c Cont r ol l e r)简称P LC,作为一种工业控制计算机,具有模块化结构、配置灵活、高速的处理速度、精确的数据处理能力、多种控制功能、网络技术和优越的性价比等性能,是目前广泛应用的控制装置之一。
PLC对步进电机也具有良好的控制能力,利用其高速脉冲输出功能或运动控制功能,即可实现对步进电机的控制。
2步进电机控制的基本原理步进电机的基本控制包括转向控制和速度控制。
从结构上看,步进电机分为三相、四相、五相等类型,常用的是三相步进电机。
三相步进电机的工作方式有三相单三拍、三相双三拍和三相六拍3种。
2.1换相顺序的控制通电换相这一过程称为脉;中分配。
例如,三相步进电机在单三拍的工作方式下,其各相通电顺序为A—B—C—吸,通电控制脉冲必须严格按照这--N.序分别控制A、B、C相的通断。
三相双三拍的通电顺序为A B-+B C—C A—A B,三相六拍的通电顺序为A一徂B—+B—+B C—C—CA—峻。
学号10212408319毕业设计(论文)西门子S7-300PLC的步进电机控制教学系:信息工程系指导教师:乔志刚专业班级:自动化1083学生姓名:彭湃二〇一二年六月毕业设计(论文)任务书毕业设计(论文)开题报告写,在学院规定时间内完成;2.设计(论文)目的及意义至少800字,基本内容和技术方案至少400字;3.指导教师意见应从选题的理论或实际价值出发,阐述学生利用知识、原理、建立的模型正确与否、学生能否完成课题,达到预期的目标。
郑重声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包括任何其他个人或集体已经发表或撰写的成果作品。
本人完全意识到本声明的法律后果由本人承担。
本人签名:日期:目录摘要 0ABSTRACT 01 绪论 01.1 设计背景 01.2 系统设计的任务 (1)2步进电机及PLC简介 (2)2.1 步进电机简介 (2)2.1.1 步进电机的分类 (2)2.1.2 步进电机的基本参数 (2)2.1.3 步进电机主要特点 (3)2.1.4 步进电机在工业控制领域的主要应用 (3)2.2 PLC的概述 (3)2.3 PLC技术在步进电机控制中的应用 (4)3.PLC控制步进电机工作原理 (6)3.1 步进电机原理简述 (6)3.2步进电机主要参数 (6)3.3步进电机驱动电路 (6)3.4 PLC控制步进电机的设计思路 (8)3.4.1 步进电机控制方式 (8)3.4.2 西门子PLC控制步进电机 (10)4 S7—300控制步进电机硬件设计 (11)4.1 S7—300的介绍 (11)4.1.1 西门子 PLC 应用中需要注意的问题 (12)4.1.2 控制系统中干扰及其来源 (13)4.1.3 主要抗干扰措施 (13)4.1.4 正确选择接地点以完善接地系统 (14)4.2 PLC控制步进电动机硬件图设计 (14)5 S7-300PLC控制步进电机的控制软件设计 (15)5.1 PLC的编程语言 (15)5.2 程序设计常用方法 (15)5.3 本设计相关指令介绍 (16)5.3.1 传送指令MOVE (16)5.3.2 S_CU 加计数器指令 (17)5.3.2 S_ODT接通延时 S5 定时器指令 (17)5.3.3 SHR_W 字右移指令 (18)5.4 程序的编写 (19)5.4.1 程序流程图 (19)5.4.2 软件模块 (19)5.4.3. 梯形图程序设计 (20)5.5 PLC控制步进电机程序设计 (20)5.5.1主程序 (20)5.5.2单四拍程序 (26)6 PLC控制步进电机系统的调试 (31)结论 (32)参考文献 (33)附录 (34)附录Ⅰ双四拍程序图 (34)附录Ⅱ单,双八拍程序图 (39)致谢 (49)摘要控制步进电机最重要的就是要产生出符合要求的控制脉冲。
机电工程学院课程设计说明书设计题目: 三相六拍步进电动机控制程序的设计与调试内容摘要步进电动机具有快速起停、精确步进和定位等特点,所以常用作工业过程控制及仪器仪表的控制元件。
目前,比较典型的控制方法是用单片机产生脉冲序列来控制步进电机。
但采用单片机控制, 不仅要设计复杂的控制程序和I /O 接口电路, 实现比较麻烦, 而且对工业现场的恶劣环境适应性差, 可靠性不高。
使用PLC可编程控制器实现三相六拍步进电动机驱动,可使步进电动机东芝的抗干扰能力强,可靠性高,同时,由于实现了模块化结构,是系统结构十分灵活,而且编程语言简短易学,便于掌握,可以进行在线修改,柔性好,体积小,维修方便。
本设计是利用PLC做三相六拍步进电动机的控制核心,用按钮开关的通断来实现对步进电机正,反转控制,而且正,反转切换无须经过停车步骤。
其次可以通过对按钮的控制来实现对高,低速度的控制。
充分发挥PLC的功能,最大限度地满足被控对象的控制要求,是设计PLC控制系统的首要前提,这也是设计最重要的一条原则。
本设计更加便于实现对步进电机的制动化控制。
关键词:PLC控制;三相六拍;步进电动机;电机正反转目录引言 (1)第1章步进电动机和PLC简介 (2)1.1步进电动机 (2)1.1.1三相六拍步进电动机 (2)1.2PLC简介 (3)1.2.1可编程控器概述 (3)1.2.2 可编程控制器的定义 (3)1.2.3 PLC的特点 (3)第2章三相六拍步进电动机控制程序的设计 (5)2.1控制程序流程图及软件模块 (5)2.2梯形图程序设计 (7)2.2.1 CPU的选择 (7)2.2.2输入输出编址 (7)2.2.3状态真值表 (7)2.3梯形图程序 (8)2.4三相六拍步进电机控制语句表 (12)2.5程序的运行及调试 (14)2.6I/O接线图 (16)结论 (17)设计总结 (18)谢辞 .................................................. 错误!未定义书签。
《电气控制与可编程控制器技术A》课程设计报告题目:三相步进电机的模拟控制院(系):专业班级:学生姓名:学号:指导教师:2014 年6 月 3 日至2014 年 6 月 13 日华中科技大学武昌分校制《电气控制与可编程控制器技术A》课程设计任务书目录1三相步进电机的PLC控制与要求 (1)1.1控制要求 (1)1.2设计要求 (1)2步进电机及PLC的工作原理 (2)2.1步进电机简介 (2)2.2步进电机的分类 (2)2.3步进电机的基本参数 (3)2.4步进电机主要特点 (4)2.5 反应式步进电机原理 (4)2.6 PLC的工作原理 (5)2.7 GX-Developer简介 (7)3设计方案及实验调试 (9)3.1步进电机I/O口分配表 (9)3.2 I/O口端子接线图 (9)3.3 设计流程 (9)3.4 设计梯形图 (11)3.5 调试过程及问题分析 (13)课程设计总结 (14)参考文献 (15)1三相步进电机的PLC控制与要求1.1控制要求本设计要求利用PLC构成三相步进电机控制系统,完成主电路的接线,并编写三拍、六拍、单步和连续控制的程序并调试。
1.2设计要求①当钮子开关拨到单步时,必须每按一次起动,电机才能旋转一个角度;②当钮子开关拨到连续时,按一次起动,电机旋转,直到按停止;③当钮子开关拨到三拍时,旋转的角度为3度;④当钮子开关拨到六拍时,旋转的角度为1.5度;⑤当钮子开关拨到正转时,旋转按顺时针旋转;⑥当钮子开关拨到反转时,旋转按逆时针旋转;⑦当单步要转到连续,可以通过停止也可以直接转换;(通过编程)⑧当连续要单步连续,可以通过停止也可以直接转换;(通过编程)⑨当三拍要转到六拍,可以通过停止也可以直接转换;(通过编程)⑩当六拍要转到三拍,可以通过停止也可以直接转换;(通过编程)⑪当正转要转到反转,可以通过停止也可以直接转换;(通过编程)⑫当反转要转到正转,可以通过停止也可以直接转换;(通过编程)2步进电机及PLC的工作原理2.1步进电机简介步进电动机是一种将数字脉冲信号转换成机械角位移或者线位移的数模转换元件。
题目基于西门子S7-300PLC的三轴联动机器人编程设计_自动化学院_院(系)自动化_专业学号*****###姓名学生姓名指导教师第一指导教师顾问教师第二指导教师(可不填写)起止日期2013.12.20 – 2014.06.10设计地点PLC控制的三轴联动系统设计摘要在工业自动化的发展过程中,多轴立式系统越来越多地应用到工业生产中。
由于PLC的稳定性和伺服电机的高精度特性,PLC控制的多轴伺服系统已经成为满足高度自动化高精度需求的一大趋势。
PLC控制的三轴联动设计时稳定的多轴系统的基础。
该系统以PLC为核心控制器,提供高稳定性和高度抗干扰能力的控制器。
三轴上的伺服电机以其高精度和适合频繁通断的特性为系统保证了高精度位置需求和频繁启停的需求。
本文介绍了基于三个伺服电机的和一个三相异步电机组成的移物系统,在PLC中通过对开关信号、各轴上的传感器输入信号和内部计时器定时器信号进行综合处理,并通过一定的时序让系统有机运行,系统的各个部分各个轴按时序逻辑运行。
最终实现系统的移物功能,并能抵抗掉电等意外干扰因素,使系统能够稳定、安全地运行。
本模板的快捷键说明,请仔细阅读:关键词:西门子、PLC、伺服电机、三轴联动、精确定位THREE-AXIS CONTROL SYSTEM DESIGN OF PLCAbstractIn the process of development of industrial automation, multi-axis vertical systems are increasingly applied to industrial production. Due to the stability and precision characteristics PLC servo motor, PLC controlled multi-axis servo system has become highly automated precision to meet the demands of a major trend.PLC-based control of three-axis stabilized design of multi-axis systems. The system PLC as the core controller, providing high stability and high anti-jamming capability of the controller. On-axis servo motor with high precision and suitable for frequent on-off characteristics of the system to ensure the accuracy position needs and the needs of the frequent start-stop.This article describes the physical system is based on three-shift servo motor and a three-phase asynchronous motors composed in the PLC through the switching signal, sensor input signal and the internal timer timer signal processing integrated along each axis, and through a certain the timing of the various parts of the system so that the organic operation, the system's various axes run by temporal logic. Ultimately the system move things function, and can resist accidental power-down and other confounding factors, enabling the system to a stable and safe operation.KEYWORDS: Siemens, PLC, Servo motor, Three-axis, Precise positioning目录摘要 (I)ABSTRACT (II)第1章绪论 (1)1.1项目背景 (1)1.2项目设计任务 (2)1.3项目设计思想 (2)1.4运行设备与环境 (2)1.5本文研究内容及各章安排 (2)1.5.1各章安排 (3)1.5.2课题关键问题和难点 (3)第2章总体设计 (4)2.1系统硬件的总体设计 (4)2.1.1硬件总体框架 (4)2.1.2PLC控制三轴电机 (4)2.2系统软件的总体设计 (5)2.2.1数据存储与查询 (5)第3章系统硬件设计 (8)3.1PLC简介 (8)3.1.1PLC的定义 (8)3.1.2PLC的发展和未来 (8)3.1.3PLC的工作原理 (8)3.1.4PLC的优点 (9)3.2系统PLC配置 (10)3.2.1S7-300CPU的基本结构 (10)3.2.2S7-300CPU的基本结构 (12)3.2.3S7-300CPU的输入输出模式 (12)3.3伺服电机简介 (14)3.3.1伺服电机的基本常识 (14)3.3.2伺服电机的工作原理 (14)3.3.3伺服电机的优点 (15)3.3.4交流伺服系统的基本结构 (15)3.3.5伺服电机与步进电机相比的优点 (15)3.4伺服电机驱动器 (16)3.4.1伺服电机驱动器的结构 (16)3.4.2伺服电机驱动器内部结构及接线 (18)3.4.3伺服电机驱动器的参数设置 (19)3.4.4传送带机械结构 (25)3.4.5系统引脚分配 (26)第4章系统软件设计 (30)4.1软件设计概略 (30)4.2各个动能块软件设计 (31)4.2.1系统的硬件配置 (31)4.2.2脉冲输出设计 (32)4.2.3电机定位设计 (35)4.2.4数据观测 (37)4.2.5掉电保护 (38)4.2.6不同形状摆放 (39)第5章系统调试 (41)5.1硬件部分的调试 (41)5.2软件部分的调试 (42)5.2.1脉冲输出的调试 (42)5.2.2程序编辑的调试 (43)第6章总结与展望 (44)参考文献 (45)致谢 (46)第1章绪论1.1 项目背景随着工业自动化的发展,现实生产中对自动化程度和生产工艺的要求越来越高,简单的一台电机已经不能满足要求。
西门子PLC与步进电机驱动器控制步进电机。
在对步进电机进行控制时,常常会采用步进电机驱动器对其进行控制。
步进电机驱动器采用超大规模的硬件集成电路,具有高度的抗干扰性以及快速的响应性,不易出现死机或丢步现象。
使用步进电机驱动器控制步进电机,可以不考虑各相的时序问题(由驱动器处理),只要考虑输出脉冲的频率(控制驱动器CP糙』及步进电机的方向(控制驱动器的龙翔)。
PLC的控制稈序也简单得多。
但是,在使用步进电机驱动器时,往往需要较高频率的脉冲。
因此PLC是否能产生高频脉冲成为能否成功控制步进电机驱动器以及步进电机的关键。
西门子CPU312C、CPU313C、CPU313-2DP 等型号,集成有用于高速计数以及高频脉冲输出的通道,可用于高速计数或高频脉冲输出。
o下面以CPU313C为例,说明高频脉冲输出的控制过程。
o CPU313C集成有3个用于高速计数或高频脉冲输出的特殊通道,3个通道位于CPU313C集成数字量输出点首位字节的最低三位,这三位通常情况卞可以作为普通的数字量输出点来使用。
再需要高频脉冲输出时,可通过硕件设置定义这三位的属性,将其作为高频脉冲输出通道来使用。
作为普通数字量输出点使用时,其系统默 认地址为Q124.0、Q124.1、Q124.2 (该地址用户可根据需要自行修改),作 为高速脉冲输出时,对应的通道分别为0 通道、1通道、2通道(通道号为固定值, 用户不能自行修改)。
每一通道都可输出 最高频率为2.5KHZ (周期为0.4ms )的 高频脉冲。
如图所示:CPU313C 中,X2前接线端子 22、23、24号接线端子分别对应通道0、 通道1、和通道3。
另外,每个通道都有自 己的硕件控制门,0通道的硕件门对应X2 前接线端子的4号接线端子,对应的输入 点默认地址为I124.2o 1通道硬件门7号 接线端子,对应的输入点默认地址为 1124.5,而2号通道硬件门为12号接线端 子,对应的输入点默认地址为1125.0oX2G至丈生「1213141151J6IJ7I 8亡2T13ll4r 5r6c7D B W ^-I n o B M ・ ・MHM M ■1234S 6789W 123456789M_ Ji —B EPn.n。