欧姆龙伺服参数审批稿
- 格式:docx
- 大小:48.82 KB
- 文档页数:2


Cat No.OEZ-DSCO0101SERVO 鼠笼式电机变频伺服控制器操作手册欧姆龙(中国)有限公司DRAGONOMRON注意事项安全注意事项● 接地端子(E:标牌中的标记)一定要可靠地接地。
未接地的情况下,有可能造成触电、误动作 的可能; 2 (请使用 2MM 以上的电线将装置电源端子台上的(E)端子接地) ● 请使用规定的电源电压,本系列的控制器使用单相 AC220V 电源电压; ● 对伺服控制器的安装、拆卸要在切断电源 5 分钟以后,并确认了 P-N 端子间的电压在 24V 以下 时再进行。
否则会造成触电、故障、误动作。
运行中要注意的键盘操作要点● 修改 QMCL 参数、用户参数时,不要超出规定的范围;否则,会由于误动作而造成装置的损坏和 事故; ● 请由熟悉 QMCL 参数、用户参数的内容及操作方法的技术人员进行参数修改的操作; ● 不要改变 QMCL 参数 NO.71(码盘补偿)的设定;否则,会由于误动作而造成装置的损坏和事 故;请根据电机与码盘的脉冲数设定该项参数。
DRAGON 伺服控制器外形欧姆龙(中国)有限公司1DRAGONOMRON目第一章、硬件部分 1.1 伺服控制器的功能和特点 1.2 伺服控制器型号、外形尺寸 1.3 三相鼠笼式变频感应电机的参数 1.4 伺服控制器技术规格表 1.5DRAGON 伺服控制器各部分说明 1.6 伺服控制器的信号端说明 1.7 关于 CPU 的电池 1.8 关于伺服控制器控制主板上的跳线开关 1.9 开关量输入/输出检查、编码器输入检查 第二章、软件部分 2.1 伺服控制器的运行 2.2 伺服控制器的程序 2.3 系统参数及用户参数 2.4QMCL 语言祥解 2.5 编程中的注意事项 第三章、伺服控制器操作流程 3.1 操作流程 3.2 快速操作说明录3 4 5 6 7 9 9 9 1011 12 14 27 3436 37第四章、应用例子 ---------------------------------------------------------------------------------------------------- 39 第五章、故障分析 5.1 故障信息 5.2DRAGON 系列伺服控制器的保护功能 5.3 故障分析 第六章、维护及检修 6.1 维护、检修 6.2 故障预防40 40 4142 42欧姆龙(中国)有限公司2DRAGONOMRON第一章、硬件部分1-1 伺服控制器的功能和特点 1.1.1 简介 DRAGON 系列伺服控制器是鼠笼式电机变频伺服控制器,可对鼠笼式电机的位置、 转速、加减速和输出转矩通过编程方便地进行控制。

欧姆龙控制伺服电机的程序实例一、程序准备:1.准备欧姆龙 PLC 控制器,并通过计算机连接PLC,进行编程;2.伺服电机,其输入端和输出端分别接入控制器;3.控制器软件,包括指令模板及编程语言等。
二、程序的编写:1.编写控制程序,完成伺服电机操作。
2.为节点内部的内容定义一个可编程节点地址,以满足节点的要求。
3.设定伺服电机的输入参数,如输入电压、电流、电压限制等。
4.定义伺服电机的输出参数,如位置控制输出参数、速度控制输出参数等。
5.编写软件参数准备程序,来读取PLC上设定的伺服电机参数,并定义控制方式。
7.定义伺服电机运行中的状态,如模式选择、速度切换、运行时间等。
8.将控制及状态程序进行编程,实现与伺服电机的集成。
9.编写调试程序,检查程序功能,保证在正常运行过程中,伺服电机机械及控制系统的正常运行。
10.将程序下载到控制器中,然后检查程序是否运行正常,确认控制功能及状态输出是否准确无误。
三、启动操作:1.连接控制器,确保控制器与伺服电机的连接状态是正确的;2.开机,查看控制器的运行状态,确保控制器正常运行;3.运行下载的控制程序,开始伺服电机的运行;4.观察伺服电机的运行情况,如果发现问题,根据情况检查是否有对程序的设置错误;5.确认没有问题,持续观察控制器的运行情况,确保伺服电机连续正常工作。
四、总结:以上是欧姆龙 PLC 控制伺服电机的程序实例,它需要通过控制器上载编程软件,并通过程序的编写、参数设置、调试实现伺服电机的控制。
总之,欧姆龙 PLC 控制伺服电机的程序是一个复杂的系统,需要技术人员具备丰富的编程经验,才能完成控制伺服电机的任务。

NJ网络实验3日期:2015.3.2 实验目的:会使用MC_Power,MC_Home,MC_Move,MC_stop。
理解轴设定,理解找原点方式。
要求每按一下触发位,轴就前进90度。
用户还可以根据自己要求从相对切换到绝对。
速度为每秒120转。
加减速默认。
伺服默认为欧姆龙G5,减速比1:1,柔性连接器连接。
思考如何设置MC_Move中的相对和绝对的切换。
实验器材:NJ、G5伺服及伺服电机两套;E3ZM-V81两个、网线若干(AT部门NJ样机箱)。
参考资料:NJ教材、NJ操作手册指导人员:实验内容:1.样机搭建:电源线部分由于样机已经安装好,此部分省略,通过网线用菊花链网络拓展方式将NJ与两套伺服驱动器连接,并将伺服驱动器节点号分别设为1、2如下图:2.网络组建:打开Sysmac Studio软件,此时可以先与PLC在线,然后打开“配置和设置”,双击ETHERCAT,如下图右键点击主设备,在弹出菜单中选择“与物理网络配置比较和合并”如下图:在弹出窗口中点击应用“物理网络配置”。
点击应用。
完成后如下图,之后关闭此页面,网络配置完毕。
网络配置完成后发现右边“配置与设置”中EtherCAT下多了节点1、节点2。
右键点击其中一个节点会有弹出菜单,如下图,在此可以通过EtherCAT与G5伺服驱动器在线,并且可以直接修改伺服驱动器的参数及重置伺服驱动器的报错。
下图是离线与在线的区别在线后双击参数,可以打开伺服驱动器参数修改界面如果修改参数后与默认参数不同,参数项前面的黑色圆形图案会变成红色在线后也可以右键点击节点,发现弹出菜单中部分选项可以选择,如下图选择“警告”后主视图中变化如下图,在这里可以清除伺服驱动器的报错及报警历史,并可以查看报警历史。
3.轴设置将PC与NJ离线,右键点击“运动控制设置”的“轴设置”,在弹出菜单中选择添加两个轴设置,分别是MC_Axis000;MC_Axis001,如下图双击MC_Axis000主视图窗中将轴类型修改为伺服轴输入设备修改为节点1设备R88D-KN01H-ECT点击主视图左侧单位换算,修改电子齿轮比,由于本次试验伺服电机旋转编码器为220=1048576,将“电机转一周的指令脉冲数”设置为1048576,根据本次试验目的要求旋转90度,将显示单位选择为“度”,将“电机转一周的工作行程”设置为360如下图。

欧姆龙伺服负载惯量比设定
欧姆龙伺服作为当今市场上的一款优质产品,广泛应用于各种工业自动化领域。
其负载惯量比设定是实现精确控制和高效运行的关键环节。
本文将详细介绍欧姆龙伺服负载惯量比设定方法及其相关注意事项。
一、欧姆龙伺服简介
欧姆龙伺服系统由伺服电机、伺服驱动器和编码器等组成,具有良好的响应速度、高精度和稳定性。
在实际应用中,欧姆龙伺服可根据不同场合和要求进行配置,满足各种控制需求。
二、负载惯量比设定的重要性
负载惯量比是描述伺服系统动态特性的重要参数,它影响到系统的响应速度、超调量以及稳态误差等。
合适的负载惯量比设定可以提高系统的控制性能,降低能耗,延长设备使用寿命。
三、设定步骤与方法
1.测量负载惯量:首先对伺服系统的负载进行测量,包括负载的质量、转动惯量等。
2.计算负载惯量比:根据测量数据,计算出负载惯量与电机惯量之比。
3.调整设定值:根据计算结果,调整欧姆龙伺服驱动器的负载惯量比设定值。
4.测试与优化:在实际运行中观察系统的性能,如响应速度、稳定性等,如有需要可进行多次调整,直至满足性能要求。
四、注意事项
1.测量负载时,要确保负载均匀分布,避免测量误差。
2.计算负载惯量比时,要考虑系统阻尼、摩擦等因素。
3.设定负载惯量比时,不宜过大或过小,以免影响系统性能。
4.在调整过程中,注意观察电机电流、速度等相关参数,以确保系统运行在安全、稳定的状态下。
五、总结
欧姆龙伺服负载惯量比设定是提高伺服系统性能的关键环节。
通过合理设定负载惯量比,可以实现快速、精确的控制效果,降低能耗,提高设备使用寿命。
欧姆龙伺服电机选型软件使用指南1.打开软件,自动弹出传动方式对话框,可以跳过。
之后在主界面可根据设计要求自己选择组合传动方式(双击添加传动方式);可根据设计要求组合不同的传动方式:a.行星减速器+丝杆b.齿轮+丝杆c.齿轮+齿轮齿条⁞2.选择好传动方式后,需要填写传动机构的相关参数。
下面以“行星减速+丝杆+工作台”为例。
2.1 双击“减速器”方框,并在弹出的对话框中填写相关参数Reduction ratio——传动比;Trans.efficiency——传动效率(若无减速器则为1);Input axis inertia——减速机转动惯量(联轴器惯量);2.2 双击“丝杆”方框,设定丝杆相关参数Screw pitch——丝杆螺距;Screw diameter——丝杆直径;Screw length——丝杆导程;Trans.efficiency——传动效率;Table mass——螺母质量;Friction coef.——丝杆摩擦系数。
2.3 双击“工作台”方框,设定工作台相关参数Workpiece mass——工作台质量;External load——外力;Friction coef.——滑轨摩擦系数。
3.设定运动参数①——对应下图t i ; ②——t i 时刻的n i 。
○1 ○2t/sn/rpmn(t 1,n 1) (t 2,n 2)t 3(t 3,n 3)6. 运动参数设定完后,软件会自动计算出满足该运动所需的相关电机参数。
然后从软件自带的“电机型号库”中选择电机,7.最后得出所选电机与计算结果的比较。
根据比较结果分析可得所选电机是否满足该运动。
如果不满足,根据软件提示的不满足项来做相应更改:⑴重新选择电机;⑵降低加减速时间。
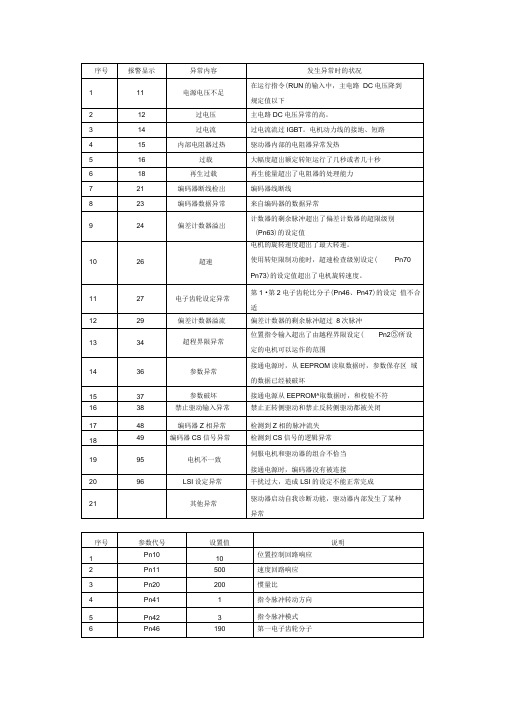
2568
2013.11
▲
2014.10
继电器
多层信号灯·旋转报警灯机器设备线束
端子台
AC /DC 风扇开关电源·
噪音滤波器·变压器LAN 线缆·光纤测量仪表
LED 灯
测量通信线束开关按钮·开关盒·指示灯·蜂鸣器连接器线束压着端子·测试用端子电路保护器·保险丝连接器电源排插
配线工具AC 电源线·接插件固定部件
保护管·软管·线槽电缆
扩展卡键盘·鼠标·周边产品显示器·显示器支架检测探头·镜头·附件箱体技术资料索引
产品目录交易指南编码器线束
OMRON 欧姆龙接线图 b 2571页
原厂型号对照表 b 2613页
AC 伺服编码器信号
定制服务长度单位0.1m
2线束产品。
技术说明资料伺服调整参数的说明(总4页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--技术说明资料伺服调整参数的说明JRAT: 负荷惯性比 ,请设定为以下的算出值 JRAT1= 马达轴换算的负荷惯量( JL) ×100% 伺服马达的惯量(JM)KVP: 速度环比例增益此值设定得越高则应答性越好. 将它设定在装置的机械系统不振动,不共振的程度. 若 JRAT已正确设定,KVP设定的值就成为速度环的应答带TVI: 速度环积分时间常数因为此积分时间常数是对伺服系统延迟的要素,积分时间常数设定大时,应答性变差,定位时间延长.相反,此积分时间常数过小时,伺服系统变得不稳定,装置的机械系统振动或共振. 请将积分时间常数设定到装置的机械系统不振动或共振的程度. 伺服系统稳定的TVI目标值应确保在速度环应答带的1/4以下 TVI【ms】=1/ (KVP【Hz】/ 4 ×2π)为可以设定的最小目标值KP: 位置环比例增益位置环增益增加时,应答性提高,稳定时间减短. 但是,在装置的机械系统的刚性较低时,机械将发生振动及共振. 想把位置环增益设定高时,应充分考虑装置的机械系统的刚性,提高系统的固有振动数, 伺服系统稳定的KP(Hz)目标值应确保在速度环应答带的1/4以下 KP【1/s】=KVP/ 4×2π为可以设定的最大目标值TCFIL: 转矩指令滤波器通过对速度环内转矩指令的1次低通滤波器的剪切频率的设定,可以有抑制共振,振动,异音的效果. 因为此转矩指令滤波器是对伺服系统延迟的要素,设定过大时应答性将恶化VCFIL: 速度指令滤波器通过对速度环内速度指令的1次低通滤波器的剪切频率的设定,可以有抑制振动的效果. 在速度控制式或位置控制式全闭环控制时设定有效果. 因为此速度指令滤波器是对伺服系统延迟的要素,设定过大时应答性将恶化PCFIL: 位置指令滤波器通过对位置环内位置指令的1次低通滤波器的剪切频率的设定,可以有抑制共振,振动,异音的效果. 因为此位置指令滤波器是对伺服系统延迟的要素,设定过大时应答性将恶化FFGN: 前馈增益减小位置偏差,位置环的应答加快. 希望将稳定时间提早时有效,但在位置环比例增益已设定较大时的装置上无效. 在观测定位结束信号.速度监测的同时进行设定,使定位结束信号不被分割,速度监测信号不发生超时.FFFIL: 前馈滤波器可设定前馈时的1次低通滤波器的剪切频率. 发生了定位结束信号被分割及速度监测时产生超时的情况下,通过此设定可以进行抑制TCNFILA/B: 转矩指令陷波滤波器对装置的机械系统的共振频率设置转矩指令陷波滤波器后,可以抑制装置机械系统的共振,异音. 通过对TCNFILA TCNFILBA 的并用,可以形成2段陷波滤波器. 利用自动调整陷波滤波器功能,TCNFILA 可以被自动设定大部分交流伺服系统位置环均采用比例调节器,因为积分调节虽然可以减小系统的静差,但是会产生位置超调,在需要高跟随性能的系统中,可以增加位置前馈增益参数。