松下伺服系统调试及常见问题解决方法
- 格式:doc
- 大小:34.00 KB
- 文档页数:4
松下伺服发生故障报警代码一览及对策在工业自动化领域,松下伺服系统以其高精度、高可靠性和高性能而备受青睐。
然而,就像任何复杂的设备一样,松下伺服在运行过程中也可能会出现各种故障,并通过报警代码向用户提示问题所在。
了解这些报警代码以及相应的对策,对于快速排除故障、恢复生产至关重要。
常见的松下伺服报警代码及含义报警代码 11:过电流保护当驱动器检测到电机的电流超过设定的允许值时,会触发此报警。
可能的原因包括电机过载、电机短路、驱动器故障等。
对策:首先,检查电机是否承受了过大的负载,如有必要,减轻负载。
其次,检查电机的连接线是否有短路现象,修复或更换损坏的线路。
如果问题仍然存在,可能是驱动器本身出现故障,需要送修或更换。
报警代码 12:过电压保护电源电压过高或者在电机减速时产生的再生能量过大,都可能导致过电压报警。
对策:确认输入电源电压是否在规定范围内,如果过高,需调整电源。
对于再生能量过大的情况,可以考虑使用外接再生电阻来消耗多余的能量。
报警代码 13:欠电压保护电源电压过低会触发此报警。
对策:检查电源输入是否正常,是否存在线路接触不良或电源故障。
确保电源供应稳定在规定的电压范围内。
报警代码 14:编码器故障编码器是用于反馈电机位置和速度信息的重要部件,如果出现故障,会影响系统的控制精度。
对策:检查编码器的连接线是否松动或损坏,重新连接或更换线路。
如果编码器本身损坏,需要更换新的编码器。
报警代码 16:过载保护电机长时间在超过额定负载的情况下运行,会导致过载报警。
对策:减轻负载,使电机在额定负载范围内运行。
同时,检查电机的散热情况,确保良好的通风散热。
报警代码 18:再生过载保护当再生电阻的容量不足或者再生能量过大时,会引发此报警。
对策:检查再生电阻的规格是否符合要求,如有必要,更换更大容量的再生电阻。
报警代码 21:过速保护电机转速超过了设定的允许值。
对策:检查控制参数设置是否正确,是否存在异常的速度指令输入。
松下伺服驱动器故障报警内容和处理方法代码:11保护功能:控制电源欠电压故障原因:控制电源逆变器上P、N间电压低于规定值。
1)交流电源电压太低。
瞬时失电。
2)电源容量太小。
电源接通瞬间的冲击电流导致电压跌落。
3)驱动器(内部电路)有缺陷。
应对措施:测量L1C、L2C和r、t之间电压。
1)提高电源电压。
更换电源。
2)增大电源容量。
3)请换用新的驱动器。
代码:12保护功能:过电压故障原因:电源电压高过了允许输入电压的范围。
逆变器上P、N间电压超过了规定值。
电源电压太高。
存在容性负载或UPS(不间断电源),使得线电压升高。
1)未接再生放电电阻。
2)外接的再生放电电阻不匹配,无法吸收再生能量。
3)驱动器(内部电路)有缺陷。
应对措施:测量L1、L2和L3之间的相电压。
配备电压正确的电源。
排除容性负载。
1)用电表测量驱动器上P、B间外接电阻阻值。
如果读数是“∞”,说明电阻没有真正地接入。
请换一个。
2)换用一个阻值和功率符合规定值的外接电阻。
3)请换用新的驱动器。
代码:13保护功能:主电源欠电压故障原因:当参数Pr65(主电源关断时欠电压报警触发选择)设成1时,L1、L3相间电压发生瞬时跌落,但至少是参数Pr6D(主电源关断检测时间)所设定的时间;或者,在伺服使能(Servo-ON)状态下主电源逆变器P-N间相电压下降到规定值以下。
1)主电源电压太低。
发生瞬时失电。
2)发生瞬时断电。
3)电源容量太小。
电源接通瞬间的冲击电流导致电压跌落。
4)缺相:应该输入3相交流电的驱动器实际输入的是单相电。
5)驱动器(内部电路)有缺陷。
应对措施:测量L1、L2、L3端子之间的相电压。
1)提高电源电压。
换用新的电源。
排除电磁继电器故障后再重新接通电源。
2)检查Pr6D设定值,纠正各相接线。
3)请参照“附件清单”,增大电源容量。
4)正确连接电源的各相(L1、L2、L3)线路。
单相电源请只接L1、L3端子。
5)请换用新的驱动器。
代码:15保护功能:电机和驱动器过热故障原因:伺服驱动器的散热片或功率器件的温度高过了规定值。
松下伺服电机调整参考与常见问题解决方法一、基本接线主电源输入采用~220V,从L1、L3接入(实际使用应参照操作手册);控制电源输入r、t也可直接接~220V;电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。
二、试机步骤1.JOG试机功能仅按基本接线就可试机;在数码显示为初始状态‘r 0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF -AcL’,然后按上、下键至‘AF-JoG’;按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’;按住‘<’键直至显示‘SrV-on’;按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。
按‘SET’键结束。
2.内部速度控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;参数No.53、No.05设置为1:(注此类参数修改后应写入EEPROM,并重新上电)调节参数No.53,即可使电机转动。
参数值即为转速,正值反时针旋转,负值顺时针旋转。
3.位置控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-; PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V);PLUS2(4脚)接脉冲信号,SIGN(6脚)接方向信号;参数No.02设置为0,No42设置为3,No43设置为1;PLUS(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。
另外,调整参数No.46、No.4B,可改变电机每转所需的脉冲数(即电子齿轮)。
常见问题解决方法:1.松下数字式交流伺服系统MHMA 2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决?这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。
请调整参数No.10、No.11、No.12,适当降低系统增益。
松下伺服驱动器维护中的常见问题及解决措施1、松下数显式交流伺服控制系统MHMA2KW,调试时一通电,电动机就震动并有挺大的噪音,随后控制器出現16号警报,该如何处理?这种情况通常是因为控制器的收获设定过高,造成了自激波动。
请调节主要参数No.10、No.11、No.12,适度减少系统软件收获。
2、松下交流伺服控制器通电就出現22号警报,为何?22号警报是伺服电机常见故障警报,造成的缘故通常有:A.编码器接线不太好:断开、短路故障、接错这些,请细心查对;B.电动机上的伺服电机不太好:移位、毁坏等,请寄修。
3、松下伺服电机在很低的速率运作时,忽快忽慢,象爬行运动相同,该怎么办?交流伺服电机出現低速档爬行运动状况通常是因为系统软件收获太低造成的,请调节主要参数No.10、No.11、No.12,适度调节系统软件收获,或运作控制器自动增益调节作用。
(请参照《使用手册》中有关收获调节的內容)4、松下交流伺服控制系统在部位操纵方法下,自动控制系统輸出的是单脉冲和方位数据信号,但无论是正转命令還是翻转命令,电动机只朝1个方位转,为何?松下沟通交流伺服控制系统在部位操纵方法下,能够接受几种操纵数据信号:单脉冲/方位、正/反单脉冲、A/B正交单脉冲。
控制器的出厂设置为A/B正交单脉冲(No42为0),请将No42改成3(单脉冲/方位数据信号)。
5、松下交流伺服控制系统的应用中,可否用伺服-ON做为操纵电动机脱机的数据信号,便于立即旋转电动机轴?虽然在SRV-ON数据信号断掉时电动机可以脱机(处在随意情况),但不要它来起动或终止电动机,经常应用它电源开关电动机将会会毁坏控制器。
假如必须保持脱机作用时,能够选用操纵方法的转换来保持:假定伺服控制系统必须部位操纵,能够将操纵方法挑选主要参数No02设定为4,即首位方法为部位操纵,其次方法为转距操纵。
随后用C-MODE来转换操纵方法:在开展部位操纵时,使数据信号C-MODE开启,使控制器工作中在首位方法(即部位操纵)下;在必须脱机时,使数据信号C-MODE合闭,使控制器工作中在其次方法(即转距操纵)下,因为转距命令键入TRQR未布线,因而电动机輸出转距为零,逐步实现脱机。
伺服系统中的修正和故障排除方法伺服系统是工业控制领域中非常重要的一种控制系统,其广泛应用于机床、印刷、包装、木工机械、电子设备等工业领域中。
然而,在伺服系统运行过程中,由于某些原因,会出现一些故障,如果不能及时的进行修正,就会影响到生产效率、产品质量等方面。
本文将介绍伺服系统中的修正和故障排除方法。
一、伺服系统的组成伺服系统由控制器、电机、编码器和负载等组成。
其中,控制器是伺服系统的核心,其作用是发出指令,控制电机的动作。
编码器是用来监测电机转动的位置和速度,负载则是电机需要驱动的载体。
二、伺服系统中常见的故障1. 位置偏差:位置偏差是指电机无法达到预定的位置。
位置偏差通常是由于编码器、电机电缆或控制器故障引起的。
2. 电机没有转动或者转动不稳定:这种情况通常是由于电机本身或者电机驱动器故障引起的。
3. 速度不稳定:这种情况通常是由于控制器问题或者电机驱动器问题引起的。
三、修正和故障排除方法1. 检查电缆:伺服系统电缆的质量和连接质量很重要,如果出现连接不可靠的情况,就会影响整个系统的稳定性。
所以,在进行伺服系统安装时,一定要保证电缆的质量和连接质量,并且定期检查电缆是否有损坏或者老化的情况。
2. 检查编码器:编码器是检测电机转动速度和位置的设备,如果编码器出现问题,就会影响整个系统的稳定性。
所以,在出现故障时,首先要检查编码器是否正确连接并且能够正常工作。
3. 检查电机:电机是伺服系统的核心,如果电机出现问题,就会影响整个系统的稳定性。
检查电机时,需要检查电机驱动器和电机本身是否出现问题。
4. 检查控制器和程序:控制器和程序是伺服系统的核心,如果控制器出现问题,就会影响整个系统的稳定性。
检查控制器时,需要检查控制器之间的连接是否稳定,并且检查程序是否正确。
根据伺服系统的组成和常见故障以及其修正和故障排除方法,可以看出,伺服系统的稳定性和正常运行非常重要。
因此,在安装和维护伺服系统时,需要保证每一个环节都要正确无误。
松下伺服驱动器故障报警内容和处理方法哎呀,咱们这可真是个技术活啊!想象一下,你辛辛苦苦养的宠物突然不听话了,还闹得满屋子都是动静。
这不,松下伺服驱动器也闹起了“小情绪”,开始发“脾气”了。
别急,让我来给你支几招,帮你搞定这个“麻烦精”。
你得知道它的“心情”。
松下伺服驱动器的报警声就像是它的心情日记,告诉你它现在是不是开心、生气还是烦恼。
比如,“嘀嘀嘀”,这是在提醒你,伺服驱动器可能因为电压不稳或者温度过高而“不高兴”;“嗡嗡嗡”,这可能是因为电机负载太重或者轴承磨损严重;“咔咔咔”,那可能是机械结构出了问题,需要检查一下。
接下来,你得对症下药。
面对不同的“病症”,你得用不同的药方。
比如,对于“电压不稳”的问题,你可以检查电源线是否接触良好,或者考虑使用稳压器来稳定供电;对于“温度过高”的情况,你得赶紧清理散热片,或者换个风扇来帮忙降温;至于“电机负载太重”或“轴承磨损”,那就得找专业的维修人员来检查一下,看看是不是该更新换代了。
预防总比治疗来得重要。
平时多留意伺服驱动器的工作状态,定期进行保养和维护,就像给宠物做体检一样,可以大大降低它出毛病的概率。
比如说,每隔一段时间就检查一下伺服驱动器的油液,确保润滑系统正常工作;每个月对伺服驱动器进行一次全面的检查,看看有没有哪里不对劲。
别忘了跟“医生”打好交道。
当你发现伺服驱动器“闹别扭”的时候,及时联系厂家的技术支持,让他们来诊断问题所在,给出专业的解决方案。
有时候,一个小小的调整就能让伺服驱动器重新焕发活力,就像给宠物换上一件新衣服一样,让它看起来精神多了。
松下伺服驱动器虽然有点“矫情”,但只要我们用心去呵护,它也能像我们的宠物一样,陪伴我们度过每一个美好的时光。
所以,不要担心它会闹别扭,只要我们及时发现并解决问题,它就会恢复往日的风采,继续为我们的事业添砖加瓦。
松下伺服驱动器故障报警内容和处理方法在工业自动化领域,松下伺服驱动器以其出色的性能和稳定性得到了广泛的应用。
然而,在使用过程中,难免会遇到各种故障报警情况。
了解这些故障报警的内容以及掌握相应的处理方法,对于确保设备的正常运行和提高生产效率至关重要。
一、松下伺服驱动器常见的故障报警内容1、过电流报警(OC)当驱动器检测到电机电流超过设定的允许值时,会触发过电流报警。
这可能是由于电机过载、短路、驱动器故障或参数设置不当等原因引起的。
2、过电压报警(OV)电源电压过高或者在制动过程中产生的再生能量无法及时释放,都可能导致过电压报警。
3、欠电压报警(UV)供电电源电压过低,无法满足驱动器的正常工作要求,就会出现欠电压报警。
4、编码器故障报警(ENC)编码器是用于反馈电机位置和速度信息的重要部件。
如果编码器出现损坏、连接不良或信号干扰等问题,驱动器会发出编码器故障报警。
5、过热报警(OH)驱动器内部温度过高,可能是由于环境温度过高、散热不良、长时间过载运行等原因造成的。
6、位置偏差过大报警(Pd)当实际位置与指令位置的偏差超过设定的允许值时,会触发位置偏差过大报警。
7、速度偏差过大报警(Sv)实际速度与指令速度的偏差超出了规定范围,导致速度偏差过大报警。
8、通信故障报警(COM)驱动器与控制器之间的通信出现异常,例如通信线路中断、通信协议不匹配等。
二、松下伺服驱动器故障报警的处理方法1、过电流报警(OC)处理方法(1)首先检查电机是否过载,如果是,减轻负载或更换更大功率的电机。
(2)检查电机和驱动器之间的连接线路是否短路,修复或更换短路的线路。
(3)确认驱动器的参数设置是否正确,特别是电流限制相关的参数。
(4)如果驱动器故障,需要维修或更换驱动器。
2、过电压报警(OV)处理方法(1)检查电源电压是否过高,如果过高,调整电源电压至正常范围。
(2)优化制动参数,确保再生能量能够及时释放。
可以考虑增加制动电阻或使用能量回馈装置。
松下伺服驱动器故障报警内容和处理方法代码:11保护功能:控制电源欠电压故障原因:控制电源逆变器上P、N间电压低于规定值。
1)交流电源电压太低。
瞬时失电。
2)电源容量太小。
电源接通瞬间的冲击电流导致电压跌落。
3)驱动器(内部电路)有缺陷。
应对措施:测量L1C、L2C和r、t之间电压。
1)提高电源电压。
更换电源。
2)增大电源容量。
3)请换用新的驱动器。
代码:12保护功能:过电压故障原因:电源电压高过了允许输入电压的范围。
逆变器上P、N间电压超过了规定值。
电源电压太高。
存在容性负载或UPS(不间断电源),使得线电压升高。
1)未接再生放电电阻。
2)外接的再生放电电阻不匹配,无法吸收再生能量。
3)驱动器(内部电路)有缺陷。
应对措施:测量L1、L2和L3之间的相电压。
配备电压正确的电源。
排除容性负载。
1)用电表测量驱动器上P、B间外接电阻阻值。
如果读数是“∞”,说明电阻没有真正地接入。
请换一个。
2)换用一个阻值和功率符合规定值的外接电阻。
3)请换用新的驱动器。
代码:13保护功能:主电源欠电压故障原因:当参数Pr65(主电源关断时欠电压报警触发选择)设成1时,L1、L3相间电压发生瞬时跌落,但至少是参数Pr6D(主电源关断检测时间)所设定的时间;或者,在伺服使能(Servo-ON)状态下主电源逆变器P-N间相电压下降到规定值以下。
1)主电源电压太低。
发生瞬时失电。
2)发生瞬时断电。
3)电源容量太小。
电源接通瞬间的冲击电流导致电压跌落。
4)缺相:应该输入3相交流电的驱动器实际输入的是单相电。
5)驱动器(内部电路)有缺陷。
应对措施:测量L1、L2、L3端子之间的相电压。
1)提高电源电压。
换用新的电源。
排除电磁继电器故障后再重新接通电源。
2)检查Pr6D设定值,纠正各相接线。
3)请参照“附件清单”,增大电源容量。
4)正确连接电源的各相(L1、L2、L3)线路。
单相电源请只接L1、L3端子。
5)请换用新的驱动器。
代码:15保护功能:电机和驱动器过热故障原因:伺服驱动器的散热片或功率器件的温度高过了规定值。
一、基本接线主电源输入采用~220V,从L1、L3接入(实际使用应参照操作手册);控制电源输入r、t也可直接接~220V;电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。
二、试机步骤1.JOG试机功能仅按基本接线就可试机;在数码显示为初始状态‘r 0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF-AcL’,然后按上、下键至‘AF-JoG’;按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’;按住‘<’键直至显示‘SrV-on’;按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。
按‘SET’键结束。
2.内部速度控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV -ON(29脚)接COM-;参数No.53、No.05设置为1:(注此类参数修改后应写入EEPROM,并重新上电)调节参数No.53,即可使电机转动。
参数值即为转速,正值反时针旋转,负值顺时针旋转。
3.位置控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV -ON(29脚)接COM-;PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V);PLUS2(4脚)接脉冲信号,SIGN(6脚)接方向信号;参数No.02设置为0,No42设置为3,No43设置为1;PLUS(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。
另外,调整参数No.46、No.4B,可改变电机每转所需的脉冲数(即电子齿轮)。
二、常见问题解决方法:1.松下数字式交流伺服系统MHMA 2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决?这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。
请调整参数No.10、No.11、No.12,适当降低系统增益。
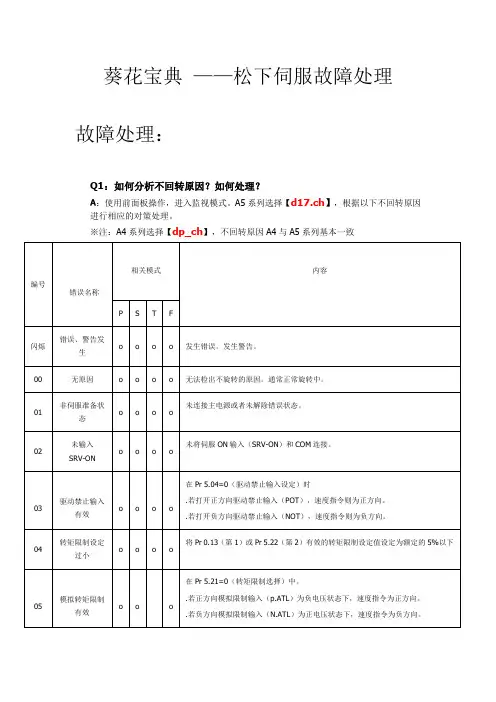
葵花宝典——松下伺服故障处理故障处理:Q1:如何分析不回转原因?如何处理?A:使用前面板操作,进入监视模式。
A5系列选择【d17.ch】,根据以下不回转原因进行相应的对策处理。
※注:A4系列选择【dp_ch】,不回转原因A4与A5系列基本一致Q2:Err11.0代表什么故障?该如何处理?A:Err 11.0表示控制电源电压(P-N间电压)不足保护,根据实际情况判断为以下何种原因,针对原因进行对策、处理※注:发生Err 11时可通过PANATERM软件或者前面板使用监视器确认P_N间电压此报警不体现在报警履历里面。
AC输入后,检测二寄管整流后DC部分的电压。
检出阀值:100V驱动器:70VDC(相当于50VAC):200V驱动器:145VDC(相当于100VAC)发生此项报警的情况下,可能是多轴同时组立时发生的情况下,可能是电源功率不足,请分开控制图,逐个组立。
Q3:Err12.0代表什么故障?该如何处理?A:Err12.0表示过电压保护,根据实际情况判断为以下何种原因,针对原因进行对策、处理。
※注:A、B型驱动器再生电阻异常报Err12.0,不报Err18.0需对再生电阻相关进行判断为了保护驱动器内部电子部品因为过电压而损坏的异常保护功能,因为电容的耐压阀值比二极管整流后的DC的PN间电压,检出阀值:100V驱动器:200VDC(相当于142VAC);200V驱动器:400VDC(相当于285VAC)检出时间小于1msPN电压可以通过驱动器的前面板的“d27.Pn”,的监视模式或者PANATERM的监视器或者波形曲线确认到。
①不动作时过电压异常保护发生的情况确认电源电压。
100V的驱动器142VDC;200V的驱动器285VAC以下→是的情况下交换驱动器②动作中过电压异常保护发生的情况(监视着PN间电压)一定速度是发生的情况电机轴被带着旋转→连续再生能量产生+没有再生电阻→提高电机驱动器的动率(原则上不可使用在连续产生再生能量的情况下)垂直轴→没有外接再生电阻的情况请追加外接再生电阻确认外接再生电阻的阻值是否适用,有无断线;Pr 0.16的设定值是否合适(0:内藏电阻;1:外接电阻10%以下;2:外接电阻没有限制;3:再生电路不动作)减速时发生的情况再生能量不能被消耗→提高电机驱动器功率减轻负载、延长减速时间、降低动作速度没有外接再生电阻的情况请追加外接再生电阻确认外接再生电阻的阻值比选品种推荐的阻值大时。
Panasonic松下数字交流伺服 安装调试说明书 (2003.11版本) 目 录 1. 松下连接示意图 2. 通电前的检查 3. 通电时的检查 4. 松下伺服驱动器的参数设定 5. 松下伺服驱动器的参数和性能优化调整 1. 松下连接示意图 重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种 情况,不在松下的保修范围!) 2. 通电前的检查 1) 确认松下伺服驱动器和电机插头的连接,相序是否正确: A.中惯量电机,不带刹车制动器的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 注: 电机相序错误,通电时会发生电机抖动现象。
B.中惯量电机MDMA 0.75KW-2.5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U F V I W B 接地 D 刹车电源 G 刹车电源 H C. 中惯量电机MDMA 3KW-5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U D V E W F 接地 G 刹车电源 A 刹车电源 B 2)确认松下伺服驱动器CN SIG和松下伺服电机编码器联接正确, 接插件螺丝拧紧。
3)确认松下伺服驱动器CN I/F和数控系统的插头联接正确, 接插件螺丝拧紧。
3.通电时的检查 1) 确认三相主电路输入电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2)确认单相辅助电路输入电压在200V-220V范围内。
4.松下伺服驱动器的参数设定 1)松下伺服驱动器修改参数的操作方法 A. 接通驱动器电源; B. 按操作面板上的“SET”键; C. 按住“MODE”键,选择参数页面 PR _ 00 ; D. 用上○∧,下○∨按钮,选择你需要修改参数的参数号码 PR _ 42 (例修改42号参数); E. 按“SET”键,显示原来的参数值 00; F. 用左○<,上○∧,下○∨按钮,改变参数值; G. 修改完毕, 按“SET”键确定。
松下伺服电机常见问题及处理办法一、基本接线主电源输入采用~220V ,从L1、L3 接入(实际使用应参照操作手册);控制电源输入r、t 也可直接接~220V ;电机接线见操作手册第22、23 页,编码器接线见操作手册第24~26 页,切勿接错。
二、试机步骤1. J OG 试机功能仅按基本接线就可试机;在数码显示为初始状态‘r 0’下,按‘SET ’键,然后连续按‘MODE ’键直至数码显示为‘AF -AcL ’,然后按上、下键至‘AF-JoG ’;按‘SET ’键,显示‘JoG - ’:按住‘^’键直至显示‘rEAdy ’;按住‘<’键直至显示‘SrV-on ’;按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57 设定。
按‘SET ’键结束。
2. 内部速度控制方式COM +(7 脚)接+12~24VDC,COM- (41 脚)接该直流电源地;SRV-ON(29 脚)接COM-;参数No.53 、No.05 设置为1:(注此类参数修改后应写入EEPROM, 并重新上电)调节参数No.53, 即可使电机转动。
参数值即为转速,正值反时针旋转,负值顺时针旋转。
3. 位置控制方式COM +(7 脚)接+12~24VDC,COM- (41 脚)接该直流电源地;SRV-ON(29 脚)接COM-;PLUS1 (3 脚)、SIGN1 (5 脚)接脉冲源的电源正极(+5V );PLUS2 (4 脚)接脉冲信号,SIGN (6 脚)接方向信号;参数No.02 设置为0,No42 设置为3,No43 设置为1;PLUS (4 脚)送入脉冲信号,即可使电机转动;改变SIGN2 即可改变电机转向。
另外,调整参数No.46 、No.4B, 可改变电机每转所需的脉冲数(即电子齿轮)。
常见问题解决方法:1. 松下数字式交流伺服系统MHMA 2KW ,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16 号报警,该怎么解决?这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。
松下伺服发生故障报警代码一览及对策在工业自动化领域,松下伺服系统以其出色的性能和稳定性备受青睐。
然而,就像任何复杂的机电设备一样,松下伺服在运行过程中也可能会出现故障,并通过报警代码来提示用户。
了解这些报警代码以及相应的对策,对于快速排除故障、恢复生产至关重要。
一、常见的松下伺服报警代码1、 11 号报警:控制电源欠电压此报警通常表示控制电源的电压低于规定值。
可能的原因包括电源输入异常、电源线路故障、电源模块损坏等。
对策是检查电源输入是否正常,测量电源电压是否符合要求,修复或更换有问题的电源线路和模块。
2、 12 号报警:过电压当主电路直流电压超过规定值时,会触发此报警。
可能是由于电源电压过高、再生能量过大无法及时消耗等原因。
解决办法包括检查电源电压是否稳定,优化加减速时间以减少再生能量,必要时安装外置再生电阻。
3、 13 号报警:主电源欠电压这意味着主电源的电压低于设定的下限。
可能是电源故障、供电线路问题或者负载过大。
需要确认电源状况,检查线路连接,评估负载是否在合理范围内。
4、 16 号报警:过载过载报警通常是由于电机负载超过了伺服驱动器的额定值。
可能是机械部件卡住、负载突然增大、电机选型不当等原因。
首先要检查机械部分是否顺畅,确认负载情况,如有必要,更换合适的电机。
5、 18 号报警:再生过载当再生能量超过再生电阻的处理能力时会出现此报警。
可能是再生电阻选型不合适、再生电阻损坏或者频繁的急加减速操作。
应检查再生电阻的规格和状态,调整运动参数以减少再生能量。
6、 21 号报警:编码器通讯故障可能是编码器线路连接不良、编码器损坏或者驱动器与编码器之间的通讯参数设置错误。
需要检查编码器的连接线路,确认编码器是否正常工作,正确设置通讯参数。
7、 23 号报警:编码器故障编码器本身出现问题,如内部元件损坏、码盘污染等。
需要清洁或更换编码器。
8、 24 号报警:位置偏差过大这表示实际位置与指令位置的偏差超过了设定的允许范围。
松下伺服驱动器故障报警内容和处理方法代码:11保护功能:控制电源欠电压故障原因:控制电源逆变器上P、N间电压低于规定值。
1)交流电源电压太低。
瞬时失电。
2)电源容量太小。
电源接通瞬间的冲击电流导致电压跌落。
3)驱动器(内部电路)有缺陷。
应对措施:测量L1C、L2C和r、t之间电压。
1)提高电源电压。
更换电源。
2)增大电源容量。
3)请换用新的驱动器。
代码:12保护功能:过电压故障原因:电源电压高过了允许输入电压的范围。
逆变器上P、N间电压超过了规定值。
电源电压太高。
存在容性负载或UPS(不间断电源),使得线电压升高。
1)未接再生放电电阻。
2)外接的再生放电电阻不匹配,无法吸收再生能量。
3)驱动器(内部电路)有缺陷。
应对措施:测量L1、L2和L3之间的相电压。
配备电压正确的电源。
排除容性负载。
1)用电表测量驱动器上P、B间外接电阻阻值。
如果读数是“∞”,说明电阻没有真正地接入。
请换一个。
2)换用一个阻值和功率符合规定值的外接电阻。
3)请换用新的驱动器。
代码:13保护功能:主电源欠电压故障原因:当参数Pr65(主电源关断时欠电压报警触发选择)设成1时,L1、L3相间电压发生瞬时跌落,但至少是参数Pr6D(主电源关断检测时间)所设定的时间;或者,在伺服使能(Servo-ON)状态下主电源逆变器P-N间相电压下降到规定值以下。
1)主电源电压太低。
发生瞬时失电。
2)发生瞬时断电。
3)电源容量太小。
电源接通瞬间的冲击电流导致电压跌落。
4)缺相:应该输入3相交流电的驱动器实际输入的是单相电。
5)驱动器(内部电路)有缺陷。
应对措施:测量L1、L2、L3端子之间的相电压。
1)提高电源电压。
换用新的电源。
排除电磁继电器故障后再重新接通电源。
2)检查Pr6D设定值,纠正各相接线。
3)请参照“附件清单”,增大电源容量。
4)正确连接电源的各相(L1、L2、L3)线路。
单相电源请只接L1、L3端子。
5)请换用新的驱动器。
代码:15保护功能:电机和驱动器过热故障原因:伺服驱动器的散热片或功率器件的温度高过了规定值。
{松下全数字式交流伺服接线和常见故障分析}一、基本接线(上海太鑫电子科技有限公司提供)主电源输入采用~220V,从L1、L3接入(实际使用应参照操作手册);控制电源输入r、t也可直接接~220V电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。
二、试机步骤(上海太鑫电子科技有限公司提供)1.JOG试机功能(上海太鑫电子科技有限公司提供)仅按基本接线就可试机;在数码显示为初始状态‘r 0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF-AcL’,然后按上、下键至‘AF-JoG’按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’按住‘<’键直至显示‘SrV-on’按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。
按‘SET’键结束。
2.内部速度控制方式(上海太鑫电子科技有限公司提供)COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM- 参数No.53、No.05设置为1:(注此类参数修改后应写入EEPROM,并重新上电)调节参数No.53,即可使电机转动。
参数值即为转速,正值反时针旋转,负值顺时针旋转。
3.位置控制方式(上海太鑫电子科技有限公司提供)COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM- PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V);PLUS2(4脚)接脉冲信号,SIGN(6脚)接方向信号;参数No.02设置为0,No42设置为3,No43设置为1;PLUS(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。
另外,调整参数No.46、No.4B(A4对应48,4B;A5对应009,010),可改变电机每转所需的脉冲数(即电子齿轮)。
常见问题解决方法: (上海太鑫电子科技有限公司提供)1.松下数字式交流伺服系统MHMA 2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决?这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。
松下伺服发生故障报警代码一览及对策在工业自动化领域,松下伺服系统因其出色的性能和稳定性而备受青睐。
然而,就像任何复杂的机械设备一样,松下伺服系统在运行过程中也可能会出现各种故障,并通过报警代码来提示用户。
了解这些报警代码及其对应的解决对策,对于快速排除故障、恢复生产至关重要。
以下是对松下伺服常见故障报警代码的详细介绍及相应的解决方法。
一、报警代码 11:过电流保护当松下伺服驱动器检测到电机电流超过设定的允许值时,会触发 11 号报警。
这可能是由于电机过载、短路、驱动器故障或参数设置不当等原因引起的。
解决对策:1、检查电机负载是否过大,如有必要,减轻负载。
2、检查电机电缆是否有短路或接地故障,修复或更换损坏的电缆。
3、检查驱动器是否正常工作,如有故障,及时维修或更换。
4、确认驱动器的参数设置是否正确,特别是电流限制相关的参数。
二、报警代码 12:过电压保护此报警通常表示电源电压过高,或者驱动器内部的再生能量处理电路出现问题。
解决办法:1、检查电源电压是否稳定在规定范围内,如有异常,调整电源。
2、延长减速时间,以减少再生能量的产生。
3、检查外接制动电阻的连接和参数设置是否正确,必要时更换合适的制动电阻。
三、报警代码 13:欠电压保护13 号报警意味着电源电压过低,可能影响伺服系统的正常运行。
应对措施:1、确认电源输入是否正常,检查电源线路是否存在接触不良或断路等问题。
2、测量电源电压,确保其在驱动器的工作电压范围内。
3、如果使用了电源滤波器,检查其是否正常工作。
四、报警代码 14:编码器故障编码器是用于反馈电机位置和速度信息的重要部件,如果出现故障,会导致系统控制精度下降甚至无法正常运行。
处理方法:1、检查编码器的连接是否松动,重新插拔并确保连接牢固。
2、检查编码器电缆是否有损坏,如有,更换电缆。
3、如果编码器本身损坏,需要更换新的编码器。
五、报警代码 16:过载保护当电机长时间运行在超过其额定负载的状态下,会触发过载保护报警。
一、基本接线
主电源输入采用~220V,从L1、L3接入(实际使用应参照操作手册);
控制电源输入r、t也可直接接~220V;
电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。
二、试机步骤
1.JOG试机功能
仅按基本接线就可试机;
在数码显示为初始状态‘r 0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF-AcL’,然后按上、下键至‘AF-JoG’;
按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’;
按住‘<’键直至显示‘SrV-o n’;
按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。
按‘SET’键结束。
2.内部速度控制方式
COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;
参数No.53、No.05设置为1:(注此类参数修改后应写入EEPROM,并重新上电)
调节参数No.53,即可使电机转动。
参数值即为转速,正值反时针旋转,负值顺时针旋转。
3.位置控制方式
COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;
PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V);
PLUS2(4脚)接脉冲信号,SIGN(6脚)接方向信号;
参数No.02设置为0,No42设置为3,No43设置为1;
PLUS(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。
另外,调整参数No.46、No.4B,可改变电机每转所需的脉冲数(即电子齿轮)。
二、常见问题解决方法:
1.松下数字式交流伺服系统MHMA 2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决?
这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。
请调整参数No.10、No.11、N o.12,适当降低系统增益。
(请参考《使用说明书》中关于增益调整的内容)
2.松下交流伺服驱动器上电就出现22号报警,为什么?
22号报警是编码器故障报警,产生的原因一般有:
编码器接线有问题:断线、短路、接错等等,请仔细查对;
电机上的编码器有问题:错位、损坏等,请送修。
3.松下伺服电机在很低的速度运行时,时快时慢,象爬行一样,怎么办?
伺服电机出现低速爬行现象一般是由于系统增益太低引起的,请调整参数No.10、No.11、No. 12,适当调整系统增益,或运行驱动器自动增益调整功能。
(请参考《使用说明书》中关于增益调整的内容)
4.松下交流伺服系统在位置控制方式下,控制系统输出的是脉冲和方向信号,但不管是正转指令还是反转指令,电机只朝一个方向转,为什么?
松下交流伺服系统在位置控制方式下,可以接收三种控制信号:脉冲/方向、正/反脉冲、A/B正交脉冲。
驱动器的出厂设置为A/B正交脉冲(No42为0),请将No42改为3(脉冲/方向信号)。
5.松下交流伺服系统的使用中,能否用伺服-ON作为控制电机脱机的信号,以便直接转动电机轴?
尽管在SRV-ON信号断开时电机能够脱机(处于自由状态),但不要用它来启动或停止电机,频繁使用它开关电机可能会损坏驱动器。
如果需要实现脱机功能时,可以采用控制方式的切换来实现:假设伺服系统需要位置控制,可以将控制方式选择参数No02设置为4,即第一方式为位置控制,第二方式为转矩控制。
然后用C-MODE来切换控制方式:在进行位置控制时,使信号C-MODE打开,使驱动器工作在第一方式(即位置控制)下;在需要脱机时,使信号C-MODE
闭合,使驱动器工作在第二方式(即转矩控制)下,由于转矩指令输入TRQR未接线,因此电机输出转矩为零,从而实现脱机。
6.在我们开发的数控铣床中使用的松下交流伺服工作在模拟控制方式下,位置信号由驱动器的脉冲输出反馈到计算机处理,在装机后调试时,发出运动指令,电机就飞车,什么原因?
这种现象是由于驱动器脉冲输出反馈到计算机的A/B正交信号相序错误、形成正反馈而造成,可以采用以下方法处理:
A.修改采样程序或算法;
B.将驱动器脉冲输出信号的A+和A-(或者B+和B-)对调,以改变相序;
C.修改驱动器参数No45,改变其脉冲输出信号的相序。
7.在我们研制的一台检测设备中,发现松下交流伺服系统对我们的检测装置有一些干扰,一般应采取什么方法来消除?
由于交流伺服驱动器采用了逆变器原理,所以它在控制、检测系统中是一个较为突出的干扰源,为了减弱或消除伺服驱动器对其它电子设备的干扰,一般可以采用以下办法:
A.驱动器和电机的接地端应可靠地接地;
B.驱动器的电源输入端加隔离变压器和滤波器;
C.所有控制信号和检测信号线使用屏蔽线。
干扰问题在电子技术中是一个很棘手的难题,没有固定的方法可以完全有效地排除它,通常凭经验和试验来寻找抗干扰的措施。
8.伺服电机为什么不会丢步?
伺服电机驱动器接收电机编码器的反馈信号,并和指令脉冲进行比较,从而构成了一个位置的半闭环控制。
所以伺服电机不会出现丢步现象,每一个指令脉冲都可以得到可靠响应。
9.如何考虑松下伺服的供电电源问题?
目前,几乎所有日本产交流伺服电机都是三相200V供电,国内电源标准不同,所以必须按以下方法解决:
A.对于750W以下的交流伺服,一般情况下可直接将单相220V接入驱动器的L1,L3端子;
B.对于其它型号电机,建议使用三相变压器将三相380V 变为三相200V,接入驱动器的L1,L2,L3。
10.对伺服电机进行机械安装时,应特别注意什么?
由于每台伺服电机后端部都安装有旋转编码器,它是一个十分易碎的精密光学器件,过大的冲击力肯定会使其损坏。