CCB2制动系统软、硬件功能介绍
- 格式:ppt
- 大小:12.86 MB
- 文档页数:22
和谐1型电力机车CCB-II制动机和谐1型电力机车CCB-II制动机一、和谐1型电力机车使用的CCB-II空气制动系统由4个部分组成:1、自动制动(即非直接制动)是通过电子制动阀EBV的自动制动手柄来实施控制的。
它通过控制列车管(BP)的充、排风来对实现对整个列车缓解、制动的控制。
在自动制动时,机车自身也将使用电制动。
2、单独制动由司机进行操作,仅用来控制机车制动缸制动和缓解。
3、后备制动(即纯空气制动)在主制动系统失效后,通过纯空气的司机制动阀控制列车管的排风,对整列车施加制动。
制动由司机制动阀在位置上的时间决定。
4、停车制动。
当机车静止且在非操控状态时,停车制动可确保机车不会溜动。
停车制动通过弹簧蓄能实现制动的,它通过位于每个司机室后墙上的两个按钮控制:一个用于施加停放制动,另外一个用于缓解停放制动。
两个按钮都将读入控制系统,以实现在重联车或同一列车中间部位机车的停车制动的制动与缓解。
当蓄电池主开关断开时,机车停车制动将自动处于制动状态。
为增加整列车的制动力,自动制动和机车电制动可以结合起来操作,实现空电混合制动。
二、CCB-II型空气制动机的构成1、CCB-II型空气制动机组成CCB-II型空气制动机组成由4个主要部件组成:电子制动阀、扩展集成处理模块、继电器接口模块、电-空控制单元。
2、电子制动阀(EBV)电子制动阀(EBV)上安装有自动制动手柄(大闸)和单独制动手柄(小闸)。
电子制动阀(EBV)链接在DP的LON网络上,并与电空制动屏(EPCU)中的5个“智能”模块进行实时通讯。
在电子制动阀(EBV)上,左侧是自动制动手柄(大闸),右侧是单独制动手柄(小闸),中间标牌上用汉语注明手柄的位置。
自动制动手柄(大闸)的档位包括运转位、初制动位、全制动位、抑制位、重联位和紧急制动位。
初制动位和全制动位之间是制动区。
单独制动手柄(小闸)的档位包括运转位和全制动位。
在运转位和全制动位之间是制动区。
CCB-Ⅱ制动机介绍、设置及操纵一、 CCB-Ⅱ制动机的由来该制动机的原创是德国产的KLR型制动机,后经美国加以改造,是目前世界上最先进的制动机,尤其适用于牵引重载列车的机车使用。
二、湖东机务段为何将DK-1型制动机改为CCB-Ⅱ型制动机国产DK-1型制动机也是由电来控制风,具有充风快、排风快的效果,但不能摇控,在万吨列车中,前部、中部和后部的机车不能同时对列车进行充风和排风,断钩事故不可能避免。
而CCB-Ⅱ制动机可以摇控,前部主控机车在操纵列车管的同时,发出无线网络指令,以不超过0.06秒的时间,使列车中部、后部的各台从控机车同步操纵列车管,消除了万吨列车运行中由于不同步操纵造成的前拉后拽现象,杜绝了断钩事故。
三、我局从太原局入助的SS4机车,制动机型号的分布我局从太原局大同机务段接回的12台SS4机车为DK-1型制动机,从湖东机务段接回的50台SS4机车为CCB-Ⅱ制动机。
四、 DK-1型制动机与CCB-Ⅱ型制动机的单台优缺点DK-1型制动机几经改进,仍有不少电空阀和气动部件,故障率高于C CB-Ⅱ型制动机,但一经故障后,可以转换成空气位操纵,仍然可以牵引列车运行。
CCB -Ⅱ型制动机全由电脑模块控制,没有任何气动部件,故障几乎为0,但万一发生故障只有救援,中断牵引。
五、 SS4机车上的CCB-Ⅱ型制动机的改装方式1、 SS4机车制动柜内原有的DK-1型制动机系统中所有阀类、塞门、风缸全部拆下,由CCB-Ⅱ型制动机系统(EPCU)代替,该系统由8个电脑模块组成,排列方式如下:BPCP ERCP DBTV 16CP20CP BCCP 13CP PSJBCCB-Ⅱ型制动机系统(EPCU)各电脑模块作用为:BPCP-列车管控制。
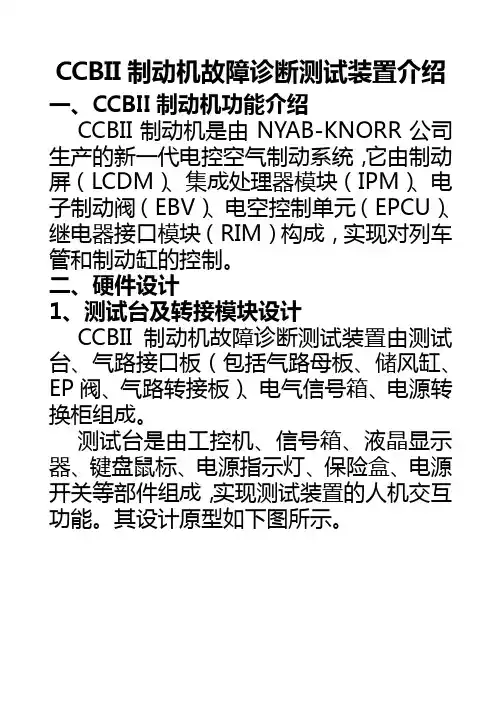
CCBII制动机故障诊断测试装置介绍一、CCBII制动机功能介绍CCBII制动机是由NYAB-KNORR公司生产的新一代电控空气制动系统,它由制动屏(LCDM)、集成处理器模块(IPM)、电子制动阀(EBV)、电空控制单元(EPCU)、继电器接口模块(RIM)构成,实现对列车管和制动缸的控制。
二、硬件设计1、测试台及转接模块设计CCBII制动机故障诊断测试装置由测试台、气路接口板(包括气路母板、储风缸、EP阀、气路转接板)、电气信号箱、电源转换柜组成。
测试台是由工控机、信号箱、液晶显示器、键盘鼠标、电源指示灯、保险盒、电源开关等部件组成,实现测试装置的人机交互功能。
其设计原型如下图所示。
图4 测试台硬件实物图气路接口板实现气路模块测试过程中的气路接口,其设计原理图如下所示:图5 气路接口设计原理电气接口模块是由差分输入阵列、带输出反馈的过流短路保护输出阵列、带双口RAM的A/D信号采集模块、基于PC/104和嵌入式QNX的控制板构成,其设计原理图如下所示。
图6 电气接口设计原理三、操作规程3.1 ERCP空气管路与控制原理(1)比例阀403产生ERBU压力,备用模式(2)检测口504用于检测403输出压力是否正确(3)传感器204用于检测均衡风缸压力(4)比例阀401本缓解没作用(5)传感器202 用于检测列车管压力(6)传感器201用于检测总风压力(7)均衡和列车管压力表用于显示均衡和列车管压力3.1.1 网络参数测试(1)LRU上电测试LRU通电时刻:T1检测到LON网络上电信号时间:T2标准:通电后五秒内LRU必须发送上电信号(PowerUp)网络数据结果:通过/失败(2)LRU智能芯片及工作参数信息1)智能芯片信息请求成功,具体内容为:芯片型号:Neuron 3150/3120Chip网络变量总数:XX地址总数:XX程序标志信息:XX读写保护:打开/关闭双域名:是/否显性地址:是/否2)工作参数信息请求成功,具体内容为:模块ID参数:XX XX XX XXXX XX程序ID参数:XX XX XX软件版本参数:yyyy/mm/dd系统ID参数:XX XX3)网络变量列表利用LONTALK Management Command操作获取LRU的所有网络列表:网络变量地址:1~65优先级别:优先/正常设置方向:输入/输出网络变量号:1~1024双向节点:是/否服务类型:确认帧/请求确认帧/重复帧/非确认帧认证交互:是/否地址索引:1~10243.1.2 状态初始化测试过程:系统模拟IPM发送系统初始化数据组包判断标准:LRU完成初始化并发送正常ERT传感器数据和MRT传感器数据3.1.3 传感器校准MRT校准过程:1、进入传感器校准模式2、将总风缸风排干净,确保压力为0kPa3、检测MRT风缸压力值,设置最低压力值4、给总风缸充风到指定压力(800~950kPa)5、检测MRT风缸压力值,设置中间压力值6、如果BPCP传输的MRT或者测试装置的总风缸传感器失效,则自动进入缺省校准模式7、恢复BPCP为正常模式ERT校准过程:1、进入传感器校准模式2、设置ERCP压力为0kPa3、检测ER风缸压力值,设置最低压力值4、设置ERCP压力为760kPa5、检测ER风缸压力值,设置最高压力值6、如果ERCP传输的ERT或者测试装置的均衡风缸传感器失效,则自动进入缺省校准模式7、恢复ERCP为正常模式3.1.4 ERCP模块自检测试过程:1、设置ERCP为系统自检模式2、均衡风缸缓解,充风到600kPa3、检测ERT压力在[586,607]范围内,否则返回故障码11024、缓解状态均衡风缸缓解漂移5、验证五秒内ERT压力变化范围在[-7,7],否则返回故障码1103 6、均衡风缸全制动,设置ERT为420kPa7、检测ERT压力在[406,427]范围内,否则返回故障码11048、全制动状态均衡风缸缓解漂移9、验证五秒内ERT压力变化范围在[-7,7],否则返回故障码1105 10、ERCP的AW4断点5秒后吸合MVER,检测MVER排风速率11、检测ERT压力在[260,360]范围内,否则返回故障码110612、AW4上电,充风18秒13、检测ERT压力在[406,427]范围内,否则返回故障码110714、恢复ERCP为正常模式3.1.5 ERCP操作端模式检测测试过程:1、设置ERCP为操作端模式2、设置EBV大闸运转位,小闸运转位3、检测ERT压力在[586,607]范围内,否则返回故障码14、设置EBV大闸初制动,小闸运转位5、检测ERT压力在[536,557]范围内,否则返回故障码26、设置EBV大闸制动区(500kPa),小闸运转位7、检测ERT压力在[486,507]范围内,否则返回故障码38、设置EBV大闸制动区(450kPa),小闸运转位9、检测ERT压力在[436,457]范围内,否则返回故障码410、设置EBV大闸全制动,小闸运转位11、检测ERT压力在[406,427]范围内,否则返回故障码512、设置EBV大闸重联位,小闸运转位13、检测ERT压力在[0,21]范围内,否则返回故障码614、设置EBV大闸运转位,小闸运转位,ERCP充风至600kPa15、设置EBV大闸紧急位,小闸运转位16、检测ERT压力在[0,7]范围内,否则返回故障码717、设置EBV大闸运转位,小闸运转位18、测试完成。

CCB-Ⅱ制动机介绍、设置及操纵一、 CCB-Ⅱ制动机的由来该制动机的原创是德国产的KLR型制动机,后经美国加以改造,是目前世界上最先进的制动机,尤其适用于牵引重载列车的机车使用。
二、湖东机务段为何将DK-1型制动机改为CCB-Ⅱ型制动机国产DK-1型制动机也是由电来控制风,具有充风快、排风快的效果,但不能摇控,在万吨列车中,前部、中部和后部的机车不能同时对列车进行充风和排风,断钩事故不可能避免。
而CCB-Ⅱ制动机可以摇控,前部主控机车在操纵列车管的同时,发出无线网络指令,以不超过0.06秒的时间,使列车中部、后部的各台从控机车同步操纵列车管,消除了万吨列车运行中由于不同步操纵造成的前拉后拽现象,杜绝了断钩事故。
三、我局从太原局入助的SS4机车,制动机型号的分布我局从太原局大同机务段接回的12台SS4机车为DK-1型制动机,从湖东机务段接回的50台SS4机车为CCB-Ⅱ制动机。
四、 DK-1型制动机与CCB-Ⅱ型制动机的单台优缺点DK-1型制动机几经改进,仍有不少电空阀和气动部件,故障率高于CCB-Ⅱ型制动机,但一经故障后,可以转换成空气位操纵,仍然可以牵引列车运行。
CCB -Ⅱ型制动机全由电脑模块控制,没有任何气动部件,故障几乎为0,但万一发生故障只有救援,中断牵引。
五、 SS4机车上的CCB-Ⅱ型制动机的改装方式1、 SS4机车制动柜内原有的DK-1型制动机系统中所有阀类、塞门、风缸全部拆下,由CCB-Ⅱ型制动机系统(EPCU)代替,该系统由8个电脑模块组成,排列方式如下:BPCP ERCP DBTV 16CP20CP BCCP 13CP PSJBCCB-Ⅱ型制动机系统(EPCU)各电脑模块作用为:BPCP-列车管控制。
ERCP-均衡风缸模拟控制,无火回送塞门装在面部。
DBTV-备份。
电脑失效时,自动控制空气制动。
16CP-作用管控制。
20CP-平均管控制。
BCCP-制动缸管控制。
13CP-单独缓解控制。
和谐1型电力机车CCB-II制动机一、和谐1型电力机车使用的CCB-II空气制动系统由4个部分组成:1、自动制动(即非直接制动)是通过电子制动阀EBV的自动制动手柄来实施控制的。
它通过控制列车管(BP)的充、排风来对实现对整个列车缓解、制动的控制。
在自动制动时,机车自身也将使用电制动。
2、单独制动由司机进行操作,仅用来控制机车制动缸制动和缓解。
3、后备制动(即纯空气制动)在主制动系统失效后,通过纯空气的司机制动阀控制列车管的排风,对整列车施加制动。
制动由司机制动阀在位置上的时间决定。
4、停车制动。
当机车静止且在非操控状态时,停车制动可确保机车不会溜动。
停车制动通过弹簧蓄能实现制动的,它通过位于每个司机室后墙上的两个按钮控制:一个用于施加停放制动,另外一个用于缓解停放制动。
两个按钮都将读入控制系统,以实现在重联车或同一列车中间部位机车的停车制动的制动与缓解。
当蓄电池主开关断开时,机车停车制动将自动处于制动状态。
为增加整列车的制动力,自动制动和机车电制动可以结合起来操作,实现空电混合制动。
二、CCB-II型空气制动机的构成1、CCB-II型空气制动机组成CCB-II型空气制动机组成由4个主要部件组成:电子制动阀、扩展集成处理模块、继电器接口模块、电-空控制单元。
2、电子制动阀(EBV)电子制动阀(EBV)上安装有自动制动手柄(大闸)和单独制动手柄(小闸)。
电子制动阀(EBV)链接在DP的LON网络上,并与电空制动屏(EPCU)中的5个“智能”模块进行实时通讯。
在电子制动阀(EBV)上,左侧是自动制动手柄(大闸),右侧是单独制动手柄(小闸),中间标牌上用汉语注明手柄的位置。
自动制动手柄(大闸)的档位包括运转位、初制动位、全制动位、抑制位、重联位和紧急制动位。
初制动位和全制动位之间是制动区。
单独制动手柄(小闸)的档位包括运转位和全制动位。
在运转位和全制动位之间是制动区。
当大闸在制动区或紧急位,小闸也处于制动区时,如果大闸给定的制动缸压力超过小闸给定的压力,右侧压单独制动手柄(小闸),超过这部分压力将被缓解。
