受电弓机构综合
- 格式:doc
- 大小:1.03 MB
- 文档页数:25


受电弓原理介绍Company Document number:WUUT-WUUY-WBBGB-BWYTT-1982GT第三节受电弓原理介绍受电弓主要功能是从额定电压DC1500V接触网上获取电源,向整个列车电气系统供电,同时还通过列车的再生制动系统将列车的动能转换为电能回馈给接触网供给其它在线列车的使用,起到双向传递枢纽的作用。
受电弓在刚性接触网和柔性接触网的线路上均能适用,在整个车辆速度范围内,受电弓有良好的动力学特性能,能够保证在各种轨道和速度下与接触网具有良好的接触状态和接触稳定性。
它在气路上的特别设计保证了它降弓时有明显的迅速下降和平稳下降两个阶段。
B2型车采用的是SBF920型单臂式受电弓。
(1)受电弓结构图10 SBF920型单臂式受电弓结构示意图单臂式受电弓主要特性有:重量轻,设计简单,维护少,卓越的接触性能以及安全的操作。
底架:底架由封闭的矩形空心钢管焊接而成。
底架上装有以下部件:支撑下支架轴承座,上支架及下支架缓冲垫,运输挂钩,降弓后支撑弓头的支撑弹簧,升弓装置,连接杆,气动降弓机构,绝缘子,高压连接板,休息位置指示器,锁钩支撑座,气动设备。
下支架:下支架由无缝钢管焊接而成,其底板位于底架上。
下支架上装有以下部件:装有升弓装置钢绳驱动的凸轮,气动降弓机构驱动的杠杆,平行导杆,减震器,上支架安装座。
上支架:上支架为无缝铝管的焊接结构,十字形钢缆连接结构使框架具有一定的横向稳定性。
上支架装有以下部件:弓头,连接杆,减振器,上升限位装置,受电头支撑轴。
连接杆:连接杆由一根用碳钢圆管制成的连接管和两个分别带有左旋及右旋螺纹的轴承座和两套绝缘轴承组成。
通过转动连接管,可调节和微调受电弓的几何形状。
弓头:弓头安装在一根位于上支架上的轴上,叶片弹簧用于悬承被固定在托架盒内的集电板。
平行导向滑环确保碳滑板与接触网的平行工作。
每个碳滑板的单个悬承可实现最大的接触特性,将磨损尽量减至最小。
悬承架在水平和竖直力异常大时保护弓头的叶片弹簧,防止其毁坏。

受电弓的结构组成
受电弓是电气化铁路中用于传输电能的装置,它位于列车车顶的车顶架上,通过接触电力线路来实现电力传输。
受电弓结构复杂,由多个部件组成。
下面将详细介绍受电弓的结构组成。
1.接触线夹:受电弓的接触线夹用于固定接触线,在传导电能的同时保证与接触线的良好接触。
2.接触弓杆:接触弓杆位于受电弓的前部,是负责接触接触线并传导电能的重要部件。
接触弓杆通常由碳纤维制成,具有弹性和导电性能。
3.铰链装置:铰链装置负责连接接触弓杆和受电弓的车顶架,使受电弓能够沿着电力线路的弧度进行运动。
4.伸缩机构:伸缩机构使接触弓能够在不同高度的接触线下作业。
它通常由升降器、拉杆和压杆组成,通过改变拉杆的长度来实现接触弓的伸缩。
5.真空断路器:真空断路器用于在受电弓进入或离开电力线路时断开或连接电路,以保证列车的正常运行。
6.小齿轮传动装置:小齿轮传动装置负责将电动机的转动传递给伸缩机构,以实现接触弓的伸缩操作。
7.内导电触头:内导电触头位于接触弓的前部,与接触线直接接触,负责传导电能。
8.外导电触头:外导电触头位于接触弓的后部,与接触线直接接触,负责传导电能。
9.弹簧:受电弓中有多个弹簧起到支撑和保持受电弓的作用,保证接
触弓与接触线之间良好的接触。
10.连杆:连杆负责将电动机的转动传递给伸缩机构和其他功能装置,实现受电弓的各种操作。
以上是受电弓的结构组成的简要介绍。
受电弓的设计和使用需要保证
稳定性和高度可靠性,以确保长时间的电力传输和铁路安全运营。
实际的
受电弓结构可能会有一些变化和调整,以适应不同的列车和电力线路要求。
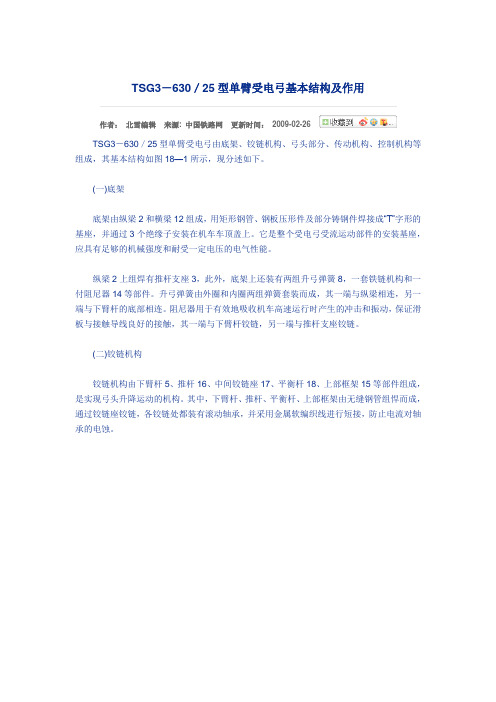
TSG3-630/25型单臂受电弓基本结构及作用作者:北雪编辑来源: 中国铁路网更新时间:2009-02-26TSG3-630/25型单臂受电弓由底架、铰链机构、弓头部分、传动机构、控制机构等组成,其基本结构如图18—1所示,现分述如下。
(一)底架底架由纵梁2和横梁12组成,用矩形钢管、钢板压形件及部分铸钢件焊接成“T”字形的基座,并通过3个绝缘子安装在机车车顶盖上。
它是整个受电弓受流运动部件的安装基座,应具有足够的机械强度和耐受一定电压的电气性能。
纵梁2上组焊有推杆支座3,此外,底架上还装有两组升弓弹簧8,一套铁链机构和一付阻尼器14等部件。
升弓弹簧由外圈和内圈两组弹簧套装而成,其一端与纵梁相连,另一端与下臂杆的底部相连。
阻尼器用于有效地吸收机车高速运行时产生的冲击和振动,保证滑板与接触导线良好的接触,其一端与下臂杆铰链,另一端与推杆支座铰链。
(二)铰链机构铰链机构由下臂杆5、推杆16、中间铰链座17、平衡杆18、上部框架15等部件组成,是实现弓头升降运动的机构。
其中,下臂杆、推杆、平衡杆、上部框架由无缝钢管组悍而成,通过铰链座铰链,各铰链处都装有滚动轴承,并采用金属软编织线进行短接,防止电流对轴承的电蚀。
1—绝缘子;2—纵梁;3—推杆支座;4—调整螺栓;5—下臂杆;6—弧形调整板;7—挂绳; 8—升弓弹簧;9—弓头;10—弹簧盒;11—升弓弹簧调整杆;12—横梁;13—转轴;14—阻尼器;15—上部框架;16—推杆;17—中间绞链座;18—平衡杆;19—转臂;20—U形连杆;21—传动绝缘子;22—传动气缸;23—缓冲阀.下臂杆5由两根钢管焊接成“T”字形构件,横向管两端装有两个转轴,纵向管的前部装有升弓弹簧支架和升弓弹簧8。
升弓弹簧的连接钢丝绳与弧形调整板6的背部紧贴,以此保证当受电弓在工作高度范围内升弓弹簧的拉力发生变化时,能产生足够的升弓转矩,维持弓头的静态接触压力基本不变。
调整调节螺栓4,可以改变弧形调整板6的倾角,也就改变了压力特性的摆动趋向。
机械原理课程设计说明书设计题目:受电弓机构综合专业: 2011级工程机械1班设计者:金宗李学号:********指导老师:**2013年12月10日目录一、设计题目:受电弓机构综合 (1)1.1 设计题目简介 (1)1.2 设计要求和有关数据 (1)1.3设计任务 (1)二、数据收集与设计思路 (2)2.1 受电弓工作原理 (2)2.2 受电弓分类 (2)2.2.1 双臂式 (2)2.2.2 单臂式 (3)2.2.3 垂直式 (4)2.2.4 石津式 (4)2.3 受电弓主要构成 (4)三、机构选型设计 (5)3.1 设计方案的要求 (5)3.2 机构的设计 (5)3.2.1 方案一:菱形机构 (5)3.2.2 方案二:平行四边形机构 (6)3.2.3 方案三:铰链四连杆机构 (7)四、机构尺度综合 (8)五、运动分析 (10)5.1 驱动方式的确定与计算 (10)5.1.1 直接型驱动机构 (10)5.2 运动仿真(ADAMS) (13)5.2.1 受电弓弓头的位移曲线图 (13)5.2.2 受电弓弓头的速度曲线图 (13)5.2.3 受电弓弓头的加速度曲线图 (14)5.3 受电弓弓头上升偏离理想直线的位移验证 (14)5.4 传动角的验证 (15)5.5 Pro/e建模模型 (15)六、总结 (15)七、收获与体会 (16)参考文献 (16)附录 (16)1.利用位移矩阵求解初始位置坐标的Matlab程序 (16)一、设计题目:受电弓机构综合1.1 设计题目简介如图所示,是从垂直于电力机车行使速度的方向看上去,受电弓的弓头的最低和最高位置。
理想的情况是以车体为参照系时,弓头沿垂直于车顶的方向直线上升、下降,最低400mm,最高1950mm。
图1-11.2 设计要求和有关数据1. 在弓头上升、下降的1550mm行程内,偏离理想化直线轨迹的距离不得超过100mm。
2. 在任何时候,弓头上部都是整个机构的最高处。

受电弓一.受电弓的组成电力牵引机车从接触网取得电能的电气设备,安装在机车或动车车顶上。
受电弓可分单臂弓和双臂弓两种,均由滑板、上框架、下臂杆(双臂弓用下框架)、底架、升弓弹簧、传动气缸、支持绝缘子等部件组成。
二.受电弓的作用底架:底架由封闭的矩形空心钢管焊接而成。
底架上装有以下部件:支撑下支架轴承座,土支架及下支架缓冲垫,运输挂钩,降弓后支撑弓头的支撑弹簧,升弓装置,连接杆,气,降弓机构,绝缘子,高压连接板,休息位置指示器,锁钩支撑座,气动设备。
下支架:下支架由无缝钢管焊接而成,其底板位于底架上。
下支架上装有以下部件:装有升马装置钢绳驱动的凸轮,气动降弓机构驱动的杠杆,平行导杆减震器,上支架安装座。
上支架:上支架为无缝铝管的焊接结构,十字形钢缆连接结构使框架具有定的横向稳定性。
上支架装有以下部件:弓头,连接杆,减振器,上升限位装置,受电头支撑轴。
连接杆:连接杆由一根用碳钢圆管制成的连接管和两个分别带有左旋及右施螺纹的轴承座和两套绝缘轴承组成。
通过转动连接管,可调节和微调受电弓的几何形状。
弓头:弓头安装在一根位于上支架上的轴上,叶片弹簧用于悬承被固定在托架盆内的集电板。
平行导向滑环确保碳滑板与接触网的平行工作。
每个碳滑板的单个悬承可实现最大的接触特性,将磨损尽量减至最小。
悬承架在水平和竖直力异常大时保护弓头的吐片弹簧,防止其毁坏。
整体的平衡使得弓头能够在按触网上自由转动。
平行导杆:当受电弓进行开弓或降弓时,平行导杆可防止弓头失稳翻转。
开弓装置:受电弓通过驱动弹簧的作用升起并对接触网施加压力。
开弓机构通过驱动钢缆和安装在下支架上的凸轮动作。
液压减震器:液压减振器通过上支架、下支架之间的减振器实现振荡衰减。
它保证了碳滑板和按触网之间的良好接触。
减振器适合的工作温度在-40至80摄氏度之间。
气动降弓机构:受电弓降弓是依靠固定在底架和下支架的杠杆之间气动降弓机构来完成,受电弓下降通过装在气压缸里的压缩弹簧实现,通过下支架上的触发臂上的话塞和活塞村起作用,如果气缸受到压缩空气的压力,则压缩弹黄会被活塞压缩,此时受电弓可开弓.升弓和降弓时间通过两个节流阀进行调节。
受电弓原理介绍Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】第三节受电弓原理介绍受电弓主要功能是从额定电压DC1500V接触网上获取电源,向整个列车电气系统供电,同时还通过列车的再生制动系统将列车的动能转换为电能回馈给接触网供给其它在线列车的使用,起到双向传递枢纽的作用。
受电弓在刚性接触网和柔性接触网的线路上均能适用,在整个车辆速度范围内,受电弓有良好的动力学特性能,能够保证在各种轨道和速度下与接触网具有良好的接触状态和接触稳定性。
它在气路上的特别设计保证了它降弓时有明显的迅速下降和平稳下降两个阶段。
B2型车采用的是SBF920型单臂式受电弓。
(1)受电弓结构图10 SBF920型单臂式受电弓结构示意图单臂式受电弓主要特性有:重量轻,设计简单,维护少,卓越的接触性能以及安全的操作。
底架:底架由封闭的矩形空心钢管焊接而成。
底架上装有以下部件:支撑下支架轴承座,上支架及下支架缓冲垫,运输挂钩,降弓后支撑弓头的支撑弹簧,升弓装置,连接杆,气动降弓机构,绝缘子,高压连接板,休息位置指示器,锁钩支撑座,气动设备。
下支架:下支架由无缝钢管焊接而成,其底板位于底架上。
下支架上装有以下部件:装有升弓装置钢绳驱动的凸轮,气动降弓机构驱动的杠杆,平行导杆,减震器,上支架安装座。
上支架:上支架为无缝铝管的焊接结构,十字形钢缆连接结构使框架具有一定的横向稳定性。
上支架装有以下部件:弓头,连接杆,减振器,上升限位装置,受电头支撑轴。
连接杆:连接杆由一根用碳钢圆管制成的连接管和两个分别带有左旋及右旋螺纹的轴承座和两套绝缘轴承组成。
通过转动连接管,可调节和微调受电弓的几何形状。
弓头:弓头安装在一根位于上支架上的轴上,叶片弹簧用于悬承被固定在托架盒内的集电板。
平行导向滑环确保碳滑板与接触网的平行工作。
每个碳滑板的单个悬承可实现最大的接触特性,将磨损尽量减至最小。
悬承架在水平和竖直力异常大时保护弓头的叶片弹簧,防止其毁坏。
第三节受电弓原理介绍受电弓主要功能是从额定电压DC1500V接触网上获取电源,向整个列车电气系统供电,同时还通过列车的再生制动系统将列车的动能转换为电能回馈给接触网供给其它在线列车的使用,起到双向传递枢纽的作用。
受电弓在刚性接触网和柔性接触网的线路上均能适用,在整个车辆速度范围内,受电弓有良好的动力学特性能,能够保证在各种轨道和速度下与接触网具有良好的接触状态和接触稳定性。
它在气路上的特别设计保证了它降弓时有明显的迅速下降和平稳下降两个阶段。
B2型车采用的是SBF920型单臂式受电弓。
1)受电弓结构图10SBF920型单臂式受电弓结构示意图单臂式受电弓主要特性有:重量轻,设计简单,维护少,卓越的接触性能以及安全的操作。
底架:底架由封闭的矩形空心钢管焊接而成。
底架上装有以下部件:支撑下支架轴承座,上支架及下支架缓冲垫,运输挂钩,降弓后支撑弓头的支撑弹簧升弓装置,连接杆,气动降弓机构,绝缘子,高压连接板,休息位置指示器,锁钩支撑座,气动设备。
下支架:下支架由无缝钢管焊接而成,其底板位于底架上。
下支架上装有以下部件:装有升弓装置钢绳驱动的凸轮,气动降弓机构驱动的杠杆,平行导杆,减震器,上支架安装座。
上支架:上支架为无缝铝管的焊接结构,十字形钢缆连接结构使框架具有一定的横向稳定性。
上支架装有以下部件:弓头,连接杆,减振器,上升限位装置,受电头支撑轴。
连接杆:连接杆由一根用碳钢圆管制成的连接管和两个分别带有左旋及右旋螺纹的轴承座和两套绝缘轴承组成。
通过转动连接管,可调节和微调受电弓的几何形状。
弓头:弓头安装在一根位于上支架上的轴上,叶片弹簧用于悬承被固定在托架盒内的集电板。
平行导向滑环确保碳滑板与接触网的平行工作。
每个碳滑板的单个悬承可实现最大的接触特性,将磨损尽量减至最小。
悬承架在水平和竖直力异常大时保护弓头的叶片弹簧,防止其毁坏。
整体的平衡使得弓头能够在接触网上自由转动。
平行导杆:当受电弓进行升弓或降弓时,平行导杆可防止弓头失稳翻转。
受电弓标准
受电弓是电力机车、电动客车等电气化铁路机车车辆的一部分,用于与架设在车辆牵引网上的接触线接触,通过接触线获得供电。
受电弓标准主要包括如下内容:
1. 弓臂形状:受电弓的弓臂形状应符合国家或行业的标准规定,一般为上下弯曲的形状,以适应接触线的高度变化。
2. 弓头材料:受电弓的弓头一般采用高导电性的铜合金材料,以保证电流的通畅传导。
3. 弓头压紧力:弓头与接触线之间需要施加一定的压紧力,以确保良好的电气接触和机械稳定性。
压紧力的大小需要符合国家或行业的标准规定。
4. 弓头与接触线的接触面形状:接触面形状应与接触线相匹配,以减小电弧的产生,并确保电流传递的稳定性和安全性。
5. 弓头与接触线的碰接方式:受电弓的弓头需要能够与接触线有良好的碰接,常见的碰接方式包括滑接碰接和刀型碰接等。
6. 弓头的调整机构:受电弓需要具备一定的调整机构,以适应接触线的高度和位置的变化,保持弓头与接触线的合适接触状态。
7. 弓头的自适应能力:受电弓需要具备一定的自适应能力,能够在高速行驶、曲线行驶等条件下自动调整接触状态,以保证
供电的连续性和稳定性。
以上是一般受电弓的标准要求,具体标准可能会根据不同的国家、地区和铁路系统的要求而有所不同。
机械原理课程设计说明书设计题目:受电弓机构综合专业:2011级工程机械1班设计者:金宗学号:20116201指导老师:鉴2013年12月10日目录一、设计题目:受电弓机构综合 (1)1.1 设计题目简介 (1)1.2 设计要求和有关数据 (1)1.3设计任务 (1)二、数据收集与设计思路 (2)2.1 受电弓工作原理 (2)2.2 受电弓分类 (3)2.2.1 双臂式 (3)2.2.2 单臂式 (3)2.2.3 垂直式 (4)2.2.4 津式 (5)2.3 受电弓主要构成 (5)三、机构选型设计 (5)3.1 设计案的要求 (5)3.2 机构的设计 (6)3.2.1 案一:菱形机构 (6)3.2.2 案二:平行四边形机构 (7)3.2.3 案三:铰链四连杆机构 (9)四、机构尺度综合 (9)五、运动分析 (12)5.1 驱动式的确定与计算 (12)5.1.1 直接型驱动机构 (13)5.2 运动仿真(ADAMS) (16)5.2.1 受电弓弓头的位移曲线图 (16)5.2.2 受电弓弓头的速度曲线图 (16)5.2.3 受电弓弓头的加速度曲线图 (17)5.3 受电弓弓头上升偏离理想直线的位移验证 (17)5.4 传动角的验证 (18)5.5 Pro/e建模模型 (18)六、总结 (19)七、收获与体会 (19)参考文献 (20)附录 (20)1.利用位移矩阵求解初始位置坐标的Matlab程序 (20)一、设计题目:受电弓机构综合1.1 设计题目简介如图所示,是从垂直于电力机车行使速度的向看上去,受电弓的弓头的最低和最高位置。
理想的情况是以车体为参照系时,弓头沿垂直于车顶的向直线上升、下降,最低400mm,最高1950mm。
图1-11.2 设计要求和有关数据1. 在弓头上升、下降的1550mm行程,偏离理想化直线轨迹的距离不得超过100mm。
2. 在任时候,弓头上部都是整个机构的最高处。
3. 只有一个自由度,用风缸驱动。
4. 收弓后,整个受电弓含风缸不超出虚线所示1400×400mm区域。
5. 在垂直于机车速度的向,最大尺寸不超过12 00mm。
6. 最小传动角大于或等于30°。
图1-21.3设计任务1. 至少提出两种运动案,然后进行案分析评比,选出一种运动案进行设计;2. 设计传动系统并确定其传动比分配。
3. 图纸上画出受电弓的机构运动案简图和运动循环图。
4. 对平面连杆机构进行尺度综合,并进行运动分析;验证输出构件的轨迹是否满足设计要求;求出机构中输出件的速度、加速度;画出机构运动线图。
5.用软件(VB、MATLAB、ADAMS或SOLIDWORKS等均可)对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。
6. 编写设计计算说明书,其中应包括设计思路、计算及运动模型建立过程以及效果分析等。
7. 在机械基础实验室应用机构综合实验装置验证设计案的可行性。
二、数据收集与设计思路2.1 受电弓工作原理受电弓也称集电弓,是电力机车从接触网受取电能的电气设备,安装在车顶上。
因为菱形受电弓的形状从侧面看好像是开的弓而名。
一般可分为单臂弓、双臂弓两种,目前(2012年)常用的是单臂受电弓。
(1)升弓:压缩空气经电空阀均匀进入传动气缸,气缸活塞压缩气缸的降弓弹簧,此时升弓弹簧使下臂杆转动,抬起上框架和滑板,受电弓匀速上升,在接近接触线时有一缓慢停滞,然后迅速接触接触线。
(2)降弓:传动气缸压缩空气经受电弓缓冲阀迅速排向大气,在降弓弹簧作用下,克服升弓弹簧的作用力,使受电弓迅速下降,脱离接触网。
2.2 受电弓分类受电弓分为四大类:双臂式,单臂式,垂直式和津式。
2.2.1 双臂式图2-1双臂式受电弓乃最传统的受电弓,亦可称“菱”形受电弓,因其形状为菱形。
但现因保养成本较高,加上故障时有扯断电车线的风险,目前部分新出厂的铁路车辆,已改用单臂式受电弓;亦有部分铁路车辆(例如新干线300系列车)从原有的双臂式受电弓,改造为单臂式受电弓。
2.2.2 单臂式图2-2除了双臂式,其后亦有单臂式的受电弓,亦可称为“之”(Z)(ㄑ)字形的受电弓。
此款受电弓的好处是比双臂式受电弓噪音为低,故障时也较不易扯断电车线,为目前较普遍的受电弓类型。
而依据各铁路车辆制造厂的设计式不同,在受电弓的设计上会有些差异。
2.2.3 垂直式图2-3垂直式受电弓,亦可称成“T”字形(亦叫作翼形)受电弓,其低风阻的特性特别适合高速行驶,以减少行车时的噪音。
所以此款受电弓主要用于高速铁路车辆。
但是由于成本较高,垂直式受电弓已经没有使用(日本新干线500系改造时由垂直式受电弓改为单臂式受电弓)。
2.2.4 津式日本冈山电气轨道的第六代社长、津龙辅于1951年发明,又称为“冈电式”、“冈轨式”。
2.3 受电弓主要构成1.底架组成;2. 阻尼器;3.升弓装置;4.下臂组装;5.弓装配;6.下导杆;7.上臂组成;8.上导杆;9.弓头;10.碳滑板;11.绝缘子图2-4三、机构选型设计3.1 设计案的要求连杆机构是整个受电弓设计的最关键机构。
连杆机构的作用是:在升弓和降弓的过程当中,让受电弓的弓头能够平稳的上下移动,而且要使弓头在运动的过程当中理想的轨迹始终是一条竖直的直线,而且能够稳定在最高点保持不动,上下偏差要尽可能小,而且要保证弓头的角位移偏差也要尽可能的小。
因此对连杆的要:尽量保证弓头的轨迹为一条竖直的线,而且要让弓头的角偏差也要尽可能小,都在误差允的围。
连杆机构的结果要尽可能的简单,而且尺寸也要尽可能的小(不占用车顶的空间,而且安装维修便,节约资源)。
要是连杆机构的传动角大于或等于30o。
3.2 机构的设计根据上面的要求,可以设计出不同的连杆机构:3.2.1 案一:菱形机构根据铁路车辆中的菱形受电弓的使用,想到了设计受电弓的菱形机构如图3-1-1所示;工作原理:风缸驱动两边滑块向中间移动,弓头F垂直上升,并且弓头F始终是处在最高点,当滑块A和滑块B无限接近时,弓头F上升到最高点。
图3-2-1升弓装置的菱形机构可行性验证:此机构中滑块A 和B 向左和向右移动,弓头可以垂直上升,但在满足传动角大于30度的情况下,可以计算出:400515.23sin(15)AC CD DF mm ====⨯o所以其最大上升高度max 31545.61550H AD =⨯=<所以,此机构在满足传动角的条件下,最大高度H 却不满足设计要求。
因此菱形机构不满足设计要求。
3.2.2 案二:平行四边形机构根据要求弓头轨迹尽量在一条直线上,因此想到了平行四边形机构可以保持平动运动趋势,设计机构如图3-2-2图3-2-2升弓装置的平行四边形机构工作原理:A 点固定,滑块B 由风缸驱动,未升弓时,弓头G 处在1400400mm ⨯区域,升弓时,滑块B 向左滑动,弓头G 垂直上升CDFE 始终是平行四边形,当滑块B 滑动到最左端时,弓头G 处在最高点。
可行性验证:由图3-1-的受电弓机构简图知,在满足传动角大于30的情况下可以计算出:400772.7sin(15)AD GD mm ===o所以机构在弓头到达最高时,其最大高度max 21545.41550H AD mm =⨯=<故此机构在满足传动角的条件下,不满足上升所需的最大高度H ,故此平行四边形机构不满足要求。
3.2.3 案三:铰链四连杆机构在机械的机构运动设计中最常用、最灵活当属铰链杆机构的设计来实现所需运动轨迹、或其它运动要求。
这里采用设计铰链四连杆机构来实现弓头的升降,机构简图如图3-1-所示图3-2-3弓头上升的铰链四连杆机构工作原理:先将A点和D点固定,CBE为整体连杆,未升弓时,整个机构(包括弓头E)处在1400400mm区域,这里选用CD连杆为主动件,采用风缸驱动CD连杆,使弓头上升。
弓头E虽然上升非直线,但在一定偏差围,此机构在弓头E的上升高度,传动角的围都符合设计要求。
可行性验证:四连杆机构使用灵活性非常的高,从图3-2-3可以看出,当弓头E上升到最大高度时,只要连杆长度设计合理,还可以继续升高,并且传动角也在设计的围。
杆长的具体计算详见第四部分的机构尺度综合。
四、机构尺度综合通过第三部分的机构选型设计知道,在满足所有的要求下,设计升弓机构应采用四连杆机构因机构要求有直线轨迹,所以采用平面连杆机构运动设计的位移矩阵法来设计机构的各杆长度。
这里有两种法可供选择和参考:法一:由Burmester 理论可知:当连杆是由两个转杆导引时,平面四杆机构可实现精确位置的最大数目为5。
当不考虑运动副间隙和构件的弹性变形时:则我们可以在1550mm 的轨迹上取5个点,以,B C 两点的坐标,,,B B C C x y x y 以及BC 的转角12131415,,,θθθθ为设计变量,然后根据实际情况自取两点,同样用刚体位移矩阵程,可得到8个非线性程,可解出这8个设计变量。
法二:由刚体位移矩阵程进行计算:在1550mm 的轨迹上取9个点,以A B C D 、、、四点的坐a ab b x y x y 、、、、c cd d x y x y 、、、以及连杆BC 的转角1213141516171819θθθθθθθθ、、、、、、、等16个变量为设计变量,利用刚体位移矩阵程,可得到16个非线性程,可解出这16个变量的值。
比较两种案之后可以发现:利用法二可得到与直线较接近的轨迹,但是,用此种法难以控制机构的大小,机构很容易超出1400400mm ⨯的区域围。
利用法一得到的轨迹不如法二所得到的轨迹理想,偏离理想直线的距离可能较大,但是在这种法中可自定两点,这样就可以人为的控制机构的大小,使之不超过1400400mm ⨯的区域围。
下面用案一对升弓机构(四连杆机构)进行求解计算:1.由于E 点在竖直直线上运动,因此E 点的坐标由E 点的轨迹确定的,所以可利用E 点建立位移矩阵来求出点B 和点C 的坐标。
位移矩阵为:1111111111111cos sin cos sin [D ]sin cos sin cos 001i i Ei E i E i i i i Ei E i E i x x y y x y q q q q q q q q 禳镲--+镲镲镲=--睚镲镲镲镲铪4-1 利用位移矩阵建立点B 和点D 与位移的矩阵关系:111[D ]11Bi B Bi i B x x y y ⎧⎫⎧⎫⎪⎪⎪⎪=⎨⎬⎨⎬⎪⎪⎪⎪⎩⎭⎩⎭4-2 111[D ]11Ci C Ci i C x x y y ⎧⎫⎧⎫⎪⎪⎪⎪=⎨⎬⎨⎬⎪⎪⎪⎪⎩⎭⎩⎭ 4-32.由杆长为定值,写出杆AB 和杆CD 的约束程:B1A 12222Bi A Bi A B12222i i 1()()()()()()()()C D A C D C D C D x x y y x x y y x x y y x x y y -+-=-+--+-=-+- 4-43.采用逆向设计的法,先确定尺寸,然后用Matlab 软件解出上面的程;对弓头E 点运动进行分析,并验证是否满足要求。