飞行程序设计8(直角航线)
- 格式:ppt
- 大小:452.00 KB
- 文档页数:175
《飞行程序设计》课程考试大纲课程名称:《飞行程序设计》课程代码:0800第一部分课程性质与目标一、课程性质与特点《飞行程序设计》是高等教育自学考试交通运输专业独立本科段的一门专业课,是本专业学生学习和掌握空域规划和设计基本理论和方法的课程。
设置本课程的目的是使学生从理论和实践上掌握以NDB、VOR、ILS等设备作为航迹引导设备时,离场程序、进场程序、进近程序、复飞程序和等待程序,以及航路的设计原理和方法。
通过对本课程的学习,使学生熟练掌握目视与仪表飞行程序设计的有关知识,使之能独立完成有关机场的飞行程序设计和优化调整。
二、课程设置目的与基本要求了解飞行程序的总体结构、设计方法;了解飞行程序的分类原则;掌握飞行程序设计的基本准则;能够独立完成有关机场的飞行程序设计和优化调整。
本课程的基本要求如下:1.了解飞行程序的基本结构和基本概念。
2.了解终端区内定位点的定位方法、定位容差和定位的有关限制。
3.了解离场程序的基本概念,掌握直线离场、指定高度转弯离场、指定点转弯离场和全向离场的航迹设计准则、保护区的确定方法、超障余度和最小净爬升梯度的计算方法,以及相应的调整方法;4.掌握航路设计的国际民航组织标准和我国的标准;5.掌握进近程序各个航段的航迹设置准则;6.掌握各种情况下,进近程序各个航段保护区的确定原则;7.掌握进近程序各个航段超障余度和超障高度的计算方法;8.掌握进近各个航段下降梯度的规定,以及梯度超过标准时的调整方法。
9.掌握基线转弯程序的基本概念,出航时间的确定方法,保护区的确定原则,超障余度和超障高度的计算方法;10.掌握直角航线的基本概念,出航时间的确定方法,保护区的确定原则,超障余度和超障高度的计算方法;11.掌握ILS进近的基本概念,精密航段障碍物评价方法,以及超障高度的计算方法;12.了解等待程序的基本概念,掌握保护区的确定方法,以及超障余度和超障高度的计算方法;13.了解区域导航程序设计的基本概念。

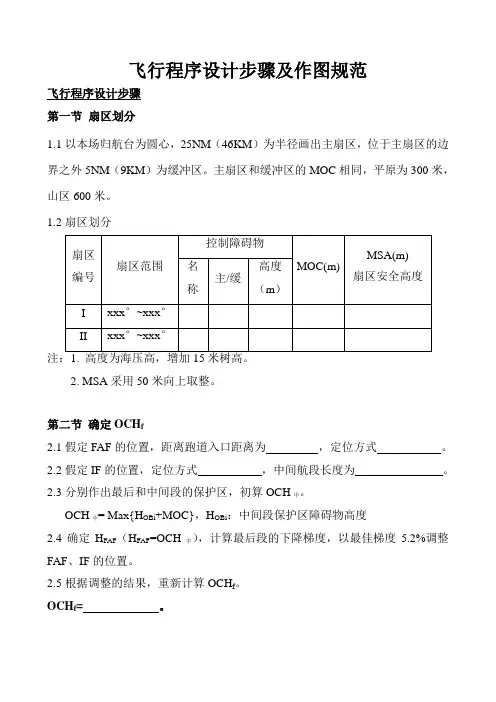
飞行程序设计步骤及作图规范飞行程序设计步骤第一节扇区划分1.1以本场归航台为圆心,25NM(46KM)为半径画出主扇区,位于主扇区的边界之外5NM(9KM)为缓冲区。
主扇区和缓冲区的MOC相同,平原为300米,山区600米。
1.2扇区划分2. MSA采用50米向上取整。
第二节确定OCH f2.1假定FAF的位置,距离跑道入口距离为,定位方式。
2.2假定IF的位置,定位方式,中间航段长度为。
2.3分别作出最后和中间段的保护区,初算OCH中。
OCH中= Max{H OBi+MOC},H OBi:中间段保护区障碍物高度2.4确定H FAF(H FAF=OCH中),计算最后段的下降梯度,以最佳梯度5.2%调整FAF、IF的位置。
2.5根据调整的结果,重新计算OCH f。
OCH f= 。
[注] OCH f是制定机场运行标准的因素之一,也属于飞行程序设计工作的一方面,有兴趣的同学可以参阅《民航局第98号令》。
第三节初步设计离场、进场、进近方法及等待点的位置和等待方法。
(1)进场、离场航迹无冲突,航迹具有侧向间隔,或垂直间隔(低进高出);(2)仪表进场程序根据机场周围航线布局、导航布局以及进场方向,选择合适的进近方式,优先顺序为:直线进近,推测航迹,沿DME弧进近,反向程序,直角航线;(3)注意进场航线设置与几种进近方式的衔接;(4)机场可以根据进场方向设置几个等待航线,等待位置尽可能与IAF点位置一致,但不强求;(5)合理规划导航台布局,最大限度地利用导航台资源。
第四节仪表离场程序设计首先根据机场周边航线分布,确定各个方向的离场方式(直线/转弯);4.1直线离场:4.1.1航迹引导台;4.1.2有无推测航迹,长度KM;4.1.3确定保护区;4.1.4对保护区内障碍物进行评估4.2转弯离场4.2.1根据障碍物分布和空域情况确定使用转弯离场方式(指定点/指定高度)4.2.2确定航迹引导台;4.2.3有无推测航迹,长度KM;4.2.4计算转弯参数4.2.6根据标称航迹确定保护区;4.2.7对保护区内障碍物进行评估各个方向离场方式描述。
PBN期末复习与学习一、PBN概述PBN概念组成1、基于性能的导航(Performance Based Navigation,PBN)指在相应的导航基础设施条件下,航空器在指定的航路、仪表飞行程序或空域飞行时,对系统精确性、完好性、可用性、连续性以及功能等方面的性能要求。
2、PBN的引入体现了航行方式从基于传感器导航到基于性能导航的转变。
3、PBN是ICAO在整合各国RANV和RNP运行实践和技术标准的基础上,提出的一种新型运行概念。
4、PBN运行的三个基本要素:导航设施、导航规范和导航应用5、PBN优势:1)有效促进民航持续安全、提高飞行品质;2)增加空域容量;3)减少地面导航设施投入;4)提高飞行效率和计划的可预见性;5)改善节能减排效果;6)为我国从航空大国向航空强国迈进打下关键的技术基础。
导航规范1、PBN基于两个基本导航规范:RNAV规范和RNP规范2、RNP与RNAV区别:RNP是一种支持机载导航性能监视和告警的RNAV系统。
RNP/RNAV X,其中X均表示在空域、航路或程序范围内运行,航空器至少在95%的飞行时间里可以达到侧向导航精度(海里计)。
导航设施1、目前RNAV使用的主要导航方式:2、RBP达到导航精度主要依靠:高精度卫星导航系统和飞机机载导航设备自身导航能力,性能指标:精度、完好性、可行性、连续性3、FMC确定RNP值依据:二、航路点容差航路点类型:1)Fly-over(飞跃航路点):;2)Fly-by(旁切航路点):1)航路点容差包括:沿航迹容差(ATT)和偏航容差(XTT)ATT由NSE决定,XTT由NSE和FTE决定RNAV(GNSS):ATT=*XTTRNP:XTT=RNP值=TSE值,ATT=*XTT4:总系统误差(TSE):导航系统误差(NSE)、航径定义误差(PDE)和飞行技术误差(FTE)的平方和根。
三、PBN程序设计概述确定最短稳定距离目的:防止设置的转弯航路点间距离过进,造成RNAV系统可能错过航路点,从而须考虑连续两个转弯航路点间的最小距离。